企业上网计算机安全准入控制系统平台搭建及应用研究_张军峰

不断增大,企业联网计算机系统的合规性
得不到落实,对企业的信息安全管理带来
挑战。构建企业联网计算机安全准入系统,
加强对企业联网计算机的规范管理,是信
息主管部门重要职责。
Symantec公司的SEP(Sygate
Enterprise Protection)系统,即是基于以
上考虑的一个网络端点准入平台,SEP系
统通过强制联网计算机符合系统健康策略
更好地保护网络资产,有效地保证远程的
连入计算机的安全、提高移动计算机和内
部网络的安全性。
SEP系统功能分为四大部分:
第一是终端保护,包括了主机的防火
墙(如反ARP病毒)、主机入侵防御、主机
防病毒(结合SAV)、系统安全检查等功能。
第二是终端管理,可以通过该功能限
制并控制主机上的应用程序,比如说对IM
(即时通讯)程序,可以根据用户的需求制
定一个黑名单或者白名单,限制软件的使
用。
第三是终端修复功能,通过结合SMS
系统来管理补丁分发及文件分发。
第四是网络准入控制功能,这个功能
是SEP的核心功能,它会把前面三大类别
功能有机结合在一起,使前面的功能发挥
最大的效益。
从图1中我们可以看出,该产品还有一
些很明显的特点,它可以管理笔记本、台式
机、手持设备以及一切端点设备。企业可以
灵活制定安全策略,通过该产品可以运用
强制的技术手段保证企业文件能够落到实
处,在技术上有一个支撑平台。采用智能的
企业上网计算机安全准入
控制系统平台搭建及应用研究
张军峰 白学斌 张居库 高先睿 辽河油田公司信息管理部 124010
1. 前言
为了保证信息安全,各企业都在构建
自身的安全体系,从防火墙,入侵检测、关
键服务器系统的安全加固等多种安全技术
及措施,特别对大型企业,随着信息化建设
的进一步深入,企业内部网络带宽的提升,
各类信息系统的开发及应用,使企业的经
营管理水平得到提高,信息化带动工业化,
信息化推动企业不断创新得到体现。
同时,信息化的普及提升了管理上的
复杂度。为保证企业信息安全,对联网计算
机安全性的关注程度进一步增强。企业中
一台联网计算机感染病毒或木马,会迅速
传播到企业的所有联网计算机。或者外部
一台存在安全隐患的计算机,未经认证和
授权接入企业网络从而威胁到其它用户。
而且,随着企业联网计算机用户的不断增
加,信息主管部门对联网计算机管理难度
全自动方式,不需要管理员手工介入。
另外系统管理员可以操作系统更新程
度、防毒软件病毒库更新程度以及系统内
软件安装程度等作为准则,创建自定义的
健康策略,以在允许访问或通信之前验证
计算机的健康状况、自动更新符合要求的
计算机以确保持续的符合性,也可以将不
符合要求的计算机限制到受限网络,直到
它们变为符合为止,从而彻底杜绝企业网
络内部病毒或木马利用网络薄弱环节进行
传播和扩散的可能。
2. 某油田企业网络及联网计算机管
理现状
某企业计算机网络由主干网、机关园
区网和二级单位园区网三部分组成。
主干网指公司核心网络和各二级区域
网之间的网络系统。共有机关和二级单位
等十几个主要中心汇接点。分为主干光纤
网和备份网两部分。主干光纤网由4台核心
交换机和若干个中心汇接点中心交换机组
成。网络拓扑结构为核心层是10Gb/s环形
网,与其他园区网做星型连接,连接速率为
1Gb/s。其中部分二级单位之间接有1G冗
余信道。
主干备份网是由网络核心层与园区网
通过DDN信道建立的网络,速率为2-4M。
备份网的核心路由器是Cisco7206,各中心
路由器是Cisco2851或2610。核心路由器与
核心交换机相连;各个中心路由器与相应
的中心交换机相连。平时数据信息在主干
光纤网中传输,只有当主干光纤和冗余信
道中断后,备份网才可以自动启动。
图1 Symantec SEP组成架构图图2 某企业网络拓扑图
十几个二级单位园区网与公司核心网络采用星型连接。各园区网中心交换机均为Cisco4500系列。园区主干网络速率100/1000M连接,10/100M到桌面,传输介质是单/多模光纤与双绞线的组合。
因特网出口租用两条100M线路,使用代理服务器和防火墙各两台,为公司5000用户提供因特网业务服务。
企业网络拓扑结构如图2
所有联网计算机的管理情况如下:统一安装Symantec防病毒企业版(Symantec Anti-Virus,SAV),病毒定义由防病毒服务器定期统一进行升级;
统一安装微软系统管理服务器(Systems Management Server,SMS),定期由服务器端统一分发安全补丁程序;
无网络管理软件对网络或节点进行统一管理。
如上所述,该企业网络内部虽然部署了防火墙、联网计算机安装了防病毒和补丁分发软件进行统一管理,但没有对联网计算机进行强制管理,也没有网络管理软件对网络和节点进行统一管理。此时,如果某台联网计算机没有安装防病毒或者补丁分发软件,假如某种病毒(木马,如ARP病毒)利用该计算机操作系统的安全漏洞对网络或节点进行攻击,由于Intranet上的网络高效性,届时受到影响的就不单是某台计算机或者网络上的某个区域。
因此,为了从根本上解决企业网内部
的薄弱性,需要制定以下几点策略:
1)加强内部联网计算机的规范管理,部署统一的安全措施。
2)检查内部联网计算机的主机完整性
并予以统一的保护。
3)对内部不合规的联网计算机予以统
一的修复。
4)对外来移动节点接入企业网络的准
入控制。
综合以上考虑,结合SEP系统平台的
特点与功能,对该企业部署SEP系统是十
分必要的。
3. 实现SEP的工作思路及策略
3.1 搭建SEP相关的系统平台
经分析该企业的网络情况如下:
1)目前,该企业整体客户端数量统计
为5000个节点,采用固定与动态结合的地
址分配方式。
2)该企业总部有两条统一集中的
Internet出口,所有客户端通过代理服务器
访问互联网。
3)另外十几家二级单位通过内部链路
直接连接核心网络,连接处采用Trunk方
式,不能使用Gateway Enforcer。
4)各二级单位有专门的DDN专线备
份链路,并专线连接到总部核心设备。
5)为了提供远程办公,该企业提供
VPN拨入。
由于该企业客户端数量比较多,而
且网络环境比较复杂、规模相对庞大,
故决定使用硬件平台搭建SEP系统,即
利用策略管理服务器(SPM)与
Gateway Enforcer和LAN Enforcer配
合组建硬件平台的方式。
与仅使用软件的方式相比而言,全
部基于硬件的平台搭建方式具有明显的
高可靠性、可用性和弹性,在以后客户
端数量不断增加的情况下,硬件平台也
能够应付自如。
3.2 在网络的部署及连接方式
根据以上对该企业的网络分析,计
划部署SEP平台如下:1)在总部部署二台策略管理服务器(SPM)
,一台作为策略分发管理服务器,一台作为数据库服务器,对所有已经安装Agent的客户端进行策略制定和日常管理。2)在两台代理服务器与核心Cisco6509之间部署两台正常工作模式下的GatewayEnforcer,实现对所有访问Internet的终端的强制管理。3)在内部部署两台LAN Enforcer,用以实现对该企业网络接入层客户端安全性的强制检查。两台LAN Enforcer作为互备,以防网络出现单点故障。但由于LANEnforcer工作需要交换机的802.1x的支持,因而可在满足条件的网段内进行强制管理。
4)使用SPM服务器作为修复服务器。
采用分担方式来对该企业约5000客户端进
行下发策略管理。
服务器具体配置如表1。网络拓扑结构如图4。上述方案的一个明显特点就是双机双线路互备,此种部署方式杜绝了网络单点
故障的问题,确保了企业的扩展能力和损
害恢复能力。
整个Enforcer部署后,能够管理全部
的终端。如果全网所有的接入层交换机均
支持802.1X,那么对此种架构的网络部署
LAN Enforcer,不需要再部署Gateway
Enforcer;而由于该公司的接入层交换机大
部分是Cisco2950或3550,均支持802.1x
协议,但仍有部分用户由于办公条件限制,
使用了不支持802.1x协议的交换机和集线器,所以两台Gateway Enforcer和两台LAN Enforcer均是必需的。3.3 对联网计算机实现的策略
搭建SEP系统平台的最终目的是对企
业网络的有效管理,安全策略的制定和分
发是保障这一目标的最终手段。在SEP系
统中,实现了多层次的安全防护策略,归结
起来是:事前预防、事中隔离、事后修复和
AV联动。具体如图5。
根据如上安全防护策略体系,在该企
业中,将利用SEP产品具体实施以下策略:
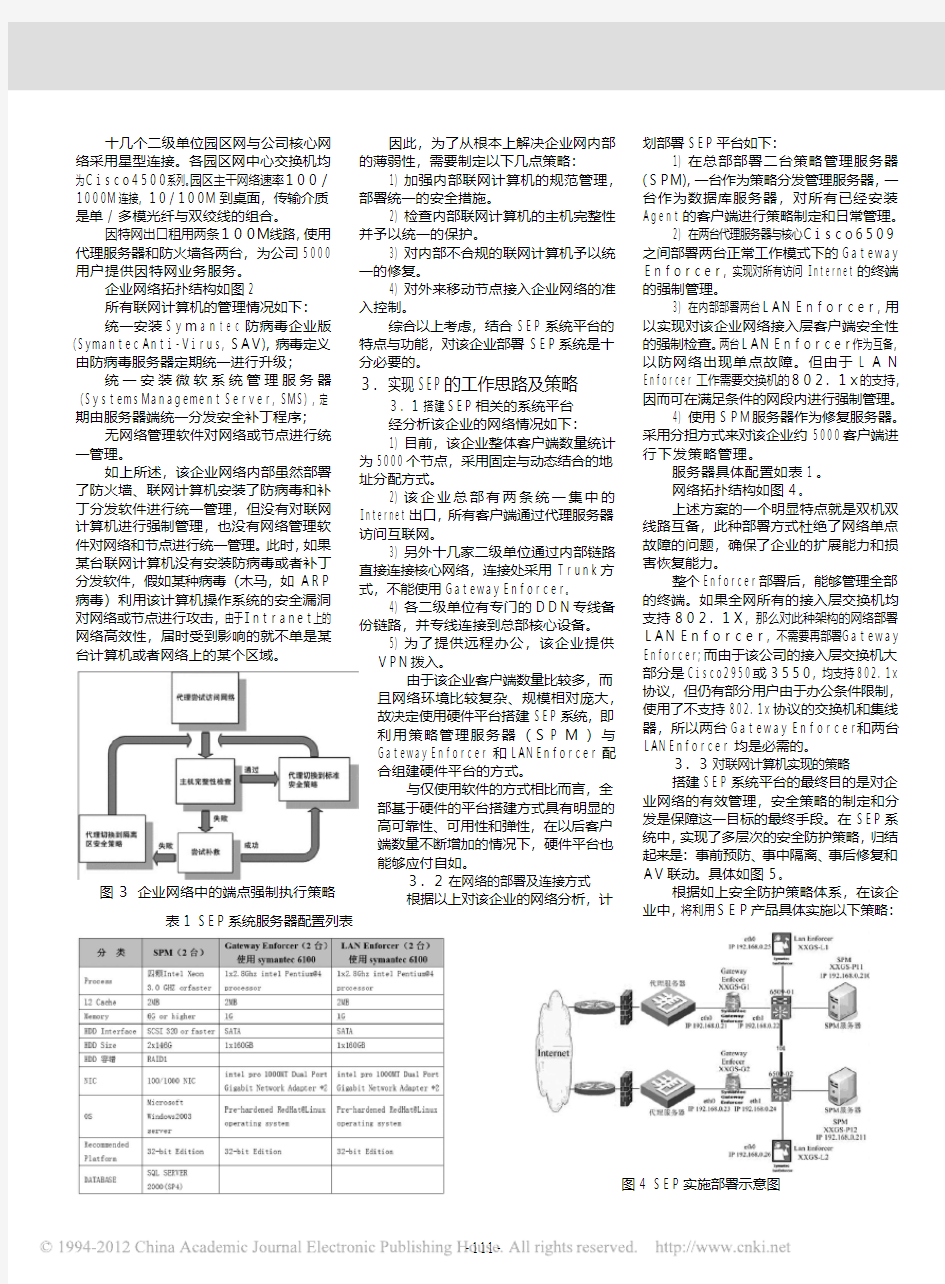
图3 企业网络中的端点强制执行策略
表1 SEP系统服务器配置列表
图4 SEP实施部署示意图
初步策略是防病毒和补丁分发软件强
制。通过SEP中ENFORCER技术来强制
各终端必须安装统一的SAV客户端,并强
制各终端的杀毒软件及时更新病毒定义;
通过SEP AGENT(SPA)强制各终端安
装SMS补丁分发软件客户端,并通过ENFORCER技术轮询检查终端SMS的状
态。初步策略要求客户端的SPA安装率达
到90%左右后开始分发。
最终策略是在实现初步策略的基础上,
根据企业的具体情况和管理措施进一步细
化和完善终端安全策略,实现终端安全的
有效管理。
4. 具体配置方法
4.1 Gateway Enforcer 配置方法
1)系统启动
Symantec 6100第一次启动会运行初
始化向导,此时时会要求选择三种
Enforcer模式,即Gateway/DHCP/LAN,
根据向导提示按实际需要设置即可。
2)第一台Gateway Enforcer设置
设置eth0(与核心交换机互联)的IP
地址:
configure interface set eth0 ip 192.
168.0.21 netmask 255.255.255.0
该命令将 eth0 的 IP 地址设置为 192.
168.0.21,将网络掩码设置为 255.255.
255.0。
设置eth1(与代理服务器互联)的IP
地址:
configure interface set eth0 ip 192.
168.0.22 netmask 255.255.255.0
该命令将 eth1的 IP 地址设置为 192.
168.0.22,将网络掩码设置为 255.255.
255.0。
3)第二台Gateway Enforcer设置方法
同上。
4)使用配置 spm 命令设置与 Policy
Manager 的连接
第一台gateway enforcer服务器SPM
配置命令:
Spm ip 192.168.0.210 http 80 key12345 group XXGS-GG1
第二台gateway enforcer服务器SPM配置命令:
Spm ip 192.168.0.211 http 80 key
12345 group XXGS-GG2使用 show status命令查看enforcer的状态出现以下显示:Enforcer status : ONLINE(ACTIVE)
Policy Manger Connected :YesPolicy Manger : 192.168.0.210805)添加路由信息:输入 configure命令进入enforcer的配置模式下执行下面命令添加路由信息: Route add 0.0.0.0 network 0.0.0.0 device eth1 gateway 10.70.5.1使用 show route 命令查看配置完成
后应该显示的信息:
Destination Gateway Genmask
Flags Metric Ref use Iface
192.168.0.0 0.0.0.0 255.255.255.0 U 0 0 0 eth0192.168.0.0 0.0.0.0 255.255.255.0 U 0 0 0 eth1
0.0.0.0 192.168.0.1 0.0.0.
0 U 0 0 0 eth1
在enforcer 模式下输入 L命令切换到
linux模式下:
使用cd 命令进入/proc/sys/
sysgate_enforcer/conf/advanced/目录下
执行
echo 0 >sms_locates_inside
在/proc/sys/sysgate_enforcer/conf/
目录下执行echo 1 >apply_config4.2 LAN Enforcer 配置方法设置方法与Gateway Enforcer同。需
要在核心交换机的连接端口上启用802.1x
协议。
4.3 SPM配置方法
SPM服务器共需三个组件,分别为
Windows Server 2003、SQL Server 2000
SP4、Symantec Policy Manager 5.1。三
个组建默认安装即可,安装完SPM 5.1之
后,按向导提示配置数据库。(具体参见《Symantec Policy Manager 安装指南》)配置完成首次登录界面如图6。
如果没有看到此画面,可以从“程序”、Symantec Policy Manager、“Symantec 策略管理控制台”登录。首次登录用户密码均为admin。
4.4 策略管理器的应用方法SPM登录后的画面如图7。用户界面功能如图8。
因为安全设置通常需要根据用户登录到公司网络时所在处所的不同而相应变化,因此可以创建不同的处所来满足这种需要。可能的处所包括:
1)办公室(在公司办公室内工作)2)远程办公室(在远程公司地点工作)
3)VPN(使用来自外部处所的 VPN)4)家庭(通过 Internet 服务提供商在家庭处所中工作)
当处所发生变动时代理会自动进行处所切换。添加处所时选策略 (Policies) 选项卡,在策略树中用户和计算机 (Usersand Computers) 或某个特定组中添加处所 (Add Location),将出现添加处所向导,此时按向导添加即可。
为了设置和分发安全策略,我们经常要用到的是策略(Policies)选项卡。SEP提供了三种策略类型:
1)防火墙策略:指定可信应用程序、
图5 多层次终端防护体系策略示意图图7 Symantec Policy Manager功能界面
图6 Symantec Policy Manager
首次登录界面
可信主机、服务、所允许应用程序的相关适配器、网络连接以及在允许访问企业网络前组织希望强制执行的限制条件。
2)主机完整性策略:保护所有网络入口点,包括内部网络、VPN、无线网络和远程访问服务 (RAS) 拨号服务器。检查是否安装有防火墙、防病毒软件、反间谍软件、补丁程序、Service Pack 或其他必需的应用程序及其更新状态。
3)操作系统保护策略:用于在运行Symantec Agent的计算机上保护注册表,保护指定的文件或目录并控制进程、DLL和应用程序执行情况的安全规则和设置。
此处我们要用到的是主机完整性策略。一般在策略库中保留广泛使用的主机完整性策略。这样就可以编辑并替换所有组中的策略以及使用该策略的所有处所。在库中创建主机完整性策略包括以下主要步骤(具体请参见《Symantec Policy Manager管理指南》):
1)添加策略和基本信息2)添加要求3)指定高级设置4)保存策略5)应用策略
4.5 对联网计算机所做的工作
策略制定后,即可将之部署到企业的处所中,此时便要求在联网计算机中安装SPA。使用策略管理器的客户端管理器(Client Manager) 选项卡部署代理软件。SPA安装率达到90%后即可使策略上线。
5. 应用效果
该企业部署了SEP系统之后,大大减轻了桌面维护人员的工作负担,企业网内终端安全性能有了明显的提高。具体如图
9。
由图9我们可以看到,部署SEP系统之前,企业内的技术维护人员整日忙于终端的桌面安全,因端点众多和工作效率制约而安全性能不高;也就是说,该企业每年始终有近千台次的终端始终被各种安全问题所困扰。在部署SEP系统之后,从技术上彻底提升了企业网络内部终端这一安全薄弱环节的安全性能,剩下一点,则需要管理层上政策与制度的配合,当行政与技术手段相结合后,即可从根本上解决一直困扰企业信息管理部门和技术支持人员的终端安全问题。
6. 几点认识
当传统的安全技术(Antivirus、Firewall、IDS/IPS等)努力保护被攻击的对象时,它们对于保障企业网络的可用性却无能为力,更不要说能确保企业的弹性与损害恢复能力。SEP系统则颠覆了以往安全产品被动防护的思路,采用积极部署的理念和主动管理的技术,从终端着手,通过主动部署安全策略,对接入私有网络的主机进行安全性及合规性检测,自动拒绝不安全的主机接入保护网络直到这些主机符合网络内的安全策略为止。
SEP系统完全体现了集中化和人性化的信息管理趋势,符合“以人为本”的科学理念。通过部署SEP安全平台,我们完善了信息安全系统包括的安全防护、安全监测与安全恢复三种机制,解决了一直困扰企业网络安全管理的问题,提高了网络的整体可用性与有效性,使技术人员的管理水平和企业员工的安全意识得到了质的提高,消除了企业网一直存在的安全薄弱环节。
图9 SEP系统应用前后效果对比图
图8 Symantec Policy Manager策略界面示意图
网络安全与防护—笔试题答案
网络安全与防护—笔试题答案
长春职业技术学院专业课程试题库 第一部分:理论题 一.选择题 学习情境1-任务1-基于Sniffer进行协议.模拟攻击分析(1/22) 1.ARP协议工作过程中,当一台主机A向另一台主机B发送ARP查询请求时,以太网帧封装的目的MAC地址是(D)。 A. 源主机A的MAC地址 B. 目标主机B的MAC地址 C. 任意地址: D02. 广播地址:FFFFFFFFFFFF 2.在下面的命令中,用来检查通信对方当前状态的命令是(B)。 A. telnet B. ping C. tcpdump D. traceroute 3.在进行协议分析时,为了捕获到网络有全部协议数据,能够在交换机上配置(A)功能。 A. 端口镜像 B. VLAN C. Trunk D. MAC地址绑定 4.在进行协议分析时,为了捕获到流经网卡的全部协议数据,要使网卡工作在(C)模式下?。 A. 广播模式 B. 单播模式 C. 混杂模式 D. 多播模式 5.在计算机中查看ARP缓存记录的命令是(A)。 A. “arp -a” B. “arp -d” C. “netstat -an” D. “ipconfig /all” 6.在计算机中清除ARP缓存记录的命令是(B)。 A. “arp -a” B. “arp -d” C. “netstat -an” D. “ipconfig /all” 7.一帧ARP协议数据中,如果其中显示操作代码(Opcode)值为1,表示此数据帧为ARP的什么帧?(D) A. 单播帧 B. 应答帧 C. 多播帧 D. 请求帧 8.在广播式网络中,发送报文分组的目的地址有(C)地址.多站(播)地址和广播地址三种。 A. 本地 B. 远程 C. 单一物理(单播) D. 逻辑 9.网络安全的基本属性是( B)。 A. 机密性 B. 其它三项均是 C. 完整性 D. 可用性
六自由度摇摆平台
大黄蜂机器人六自由度摇摆台 大黄蜂机器人有限公司的六自由度平台系统由采用Stewart机构的六自由度运动平台、计算机控制系统、驱动系统等组成。六自由度运动平台(如下图)的下平台安装在地面上,上 平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。计算机控制系统通过协调控制电动缸的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。
各主要部分简述如下: 本设备主要由以下部分组成:运动上平台、下平台(基座)、电动缸及伺服 电机、驱动器系统、综合控制及监测系统。 各自功能如下: 上平台:是有效载荷的安装基面,提供六自由度的摇摆运动。 下平台:是六自由度摇摆台的安装基面,需要承受足够大的冲击力。 电动缸及伺服电机:通过控制电动缸活塞杆的行程,实现运动平台台体的六自由度运动,共6套。 驱动器系统:接收用户控制指令,通过控制伺服电机的输入,对伺服电机的输出转速和转角进行控制,达到控制电动缸活塞杆出速度和行程的目的,共6套。 综合控制监测系统:硬件为用户计算机,软件为研制方配合开发;同时,它 还对平台的运动过程进行监测,预防和处理系统的异常情况。
平台总体运动能力指标如上表,具体表述如下: a.平台定位精度及重复定位精度为0.5mm及0.1mm; b.平台转动精度及重复转动精度为0.1°及0.05°; c.行程回差小于0.2mm; d.平台X方向运动速度可从0mm/s到250mm/s连续变化;YZ方向运动 速度可从0mm/s到250mm/s连续变化; e.单支杆可承受轴向力不小于700N; f.单支杆的运动速度可从0m/s到250mm/s连续变化; g.平台中位位置固有频率:不小于40Hz; h.机械组件需具有开放性,可拆卸组装; i.机械设计安全系数不小于 2.0,驱动裕度不小于 3.0; j.额定载荷下,全行程往复工作寿命不小于1×104次,存储寿命不小于48月;
控制系统仿真实验报告
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
六自由度平台说明书
技术领域 本发明涉及一种总线型并联六自由度平台,利用总线型控制方式控制伺服电机,经过虎克铰、伺服电动缸的传动使上平台可以模拟各种空间动作。 背景技术 传统的伺服电机控制技术是通过运动控制卡发出脉冲信号和方向信号,驱动伺服电机做不同动作。每一个伺服电机都需要一组对应的脉冲信号和方向信号控制,六自由度平台有六个伺服电机就需要六组信号。用CAN总线控制伺服电机,只需要一台计算机通过CAN总线通信适配卡向总线发送控制信息,伺服驱动器选择需要的信息接收来控制伺服电机,不再需要运动控制卡,节省了硬件和接线,实现了传输信号的数字化。一条CAN总线最多可以有128个节点,一个六自由度平台有六个伺服电机即六个节点,所以一条总线可以控制最多20个六自由度平台。并且总线抗干扰能力强,可以适应恶劣的工作环境。 六自由度运动平台是由六个伺服电机、六个伺服电动缸,上、下各六个虎克铰和上、下两个平台组成,下平台固定在基础上,借助六个伺服电动缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ,X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。六自由度运动平台涉及到机械、伺服电动缸、伺服电机、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是控制领域水平的标志性象征。主要包括平台的空间运动机构、伺服系统、控制系统。 发明内容 本发明解决的技术问题是由总线型方式控制伺服电机使平台可以模拟各种空间运动姿态,并且达到精确控制和信息的反馈。 本发明为解决其技术问题采用的方案是:平台包括三部分,分别是控制系统、伺服系统和运动机构。控制模块包括一台计算机、一个CAN总线通信适配卡和一条CAN总线;伺服系统包括六个伺服驱动器和六个伺服电机;运动机构包括十二个虎克铰、六个伺服电动缸和上、下平台。所述上位机与总线通信适配卡连接,CAN总线通信适配卡与CAN总线连接,CAN总线与六台伺服驱动器连接,六台伺服驱动器分别与六台伺服电机连接,伺服电机与伺服电动缸连接,伺服电动缸与虎克铰连接,六个虎克铰和上平台连接,下平台与六个虎克铰连
复杂过程控制系统设计与Simulink仿真
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
六自由度平台实验报告
六自由度平台实验报告 机械电子工程系张梦辉21525074 一、实验简介 实验对象为一个六自由度平台,每个自由度的运动均由一个永磁式直流电机驱动,实验要求对其中一个电动缸进行位置控制,位置由一个滑变电阻式的位移传感器反馈回的电压信号确定,驱动则是通过研华的PCI1716L的数字输出实现,控制软件采用Labview8.6。 二、实验装置 PC机一台 研华PCI1716L多功能板卡一个 PCI总线一根 固态继电器板一块 220V AC—24VDC变压器三个 直流电动机六个 三、实验台介绍 六自由度运动平台是由六支电动缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只电动缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ,X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是机电控制领域水平的标志性象征。主要包括平台的空间运动机构、空间运动模型、机电控制系统。 本实验台,PC机作为板卡和人的接口,通过在PC机上编程来控制板卡发送数字信号和采集位置信号。将PCI多功能卡设置为设备0,选择PCI板卡的模拟信号输入口AI4口来采集2号缸的位置信号,通过PORT1号口来控制2号缸对应直流电机的正转、反转和停止。通过数字信号输出口发送开关量来控制固态继电器的开和闭,固态继电器导通的话,则接通直流电动机,直流电动机开始运行,这时候,电动缸就会朝着指定方向运行,并且到达指定的位置。
实验中用到的接口的说明: AI0-AI5 模拟信号输入口,用来采集六个缸的位置信号;AIGND 模拟信号公共地 DO0-DO11 数字信号输出口,用来控制六个缸的运动 (其中DO11-DO10 分别控制1号缸的正反转 DO09-DO08 分别控制2号缸的正反转 DO07-DO06 分别控制3号缸的正反转 DO05-DO04 分别控制4号缸的正反转 DO03-DO02 分别控制5号缸的正反转 DO01-DO00 分别控制6号缸的正反转 DGND 数字输出信号公共地
六自由度运动平台方案设计报告
编号 密级内部阶段标记 C 会签 校对 审核 批准六自由度运动平台 方案设计 名称
内容摘要: 针对YYPT项目在原理样机出现的问题,对YYPT原理样机从结构设计、伺服系统等方面进行优化设计,以满足设计及使用要求。 主 YYPT 优化 题 词 更改单号更改日期更改人更改办法 更 改 栏
1概述 YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。 2 原理样机技术状态 2.1 原理样机方案 2.1.1 组成 原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。具体产品组成表见表2.1。 序号产品名称型号厂家数量备注 1 电动缸KH08XX(3)西安方元明 6 安装345厂电机 2 电阻尺LTS-V1-375 上海徳测 6 3 驱动器50A8 AMC 6 3 A/D卡PCI1716 研华 1 4 D/A卡PCI1723 研华 1 5 工控机610H 研华 1 6 直流电源 1 2.1.2 结构方案 六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
汽车整车车门电子控制系统
指导教师评定成绩: 审定成绩: 重庆XXXXX 学 现代汽车电控课程设计报告 设计题目:汽车车门控制系统设计与实现(硬件) 单位(系部): 学生姓名: 专业: 班级: 学号: 指导教师: 设计时间:年月
目录 第一章设计方法简介 (2) 第二章车门ECU硬件设计 (3) 2.1 整体结构图 (3) 2.2 芯片TLE8201 (4) 2.2.1 芯片TLE8201结构 (4) 2.2.2 TLE8201应用电路 (5) 2.2.3 电源 (6) 2.2.4 SPI (7) 2.2.5 PWM输入 (7) 2.2.6 电流感应 (7) 2.2.7 输出级 (8) 2.3芯片BTS781及其TLE6250 (8) 2.4 电路设计 (8) 第三章设计小结 (9) 3.1致谢 (9) 3.2 心得体会 (10) 3.3 对设计的建议及可探讨问题 (10) 参考文献 (10)
【摘要】:提出了一种“总体分布、局部集中式”的轿车车门ECU设计,ECU 之间以CAN总线方式通信。以英飞凌公司XC164CS微控制器和TLE8201、BTS781功率驱动芯片为核心设计了车门ECU的硬件电路;在XC164CS上移植了μC/OS-Ⅱ实时操作系统,在此基础上进行了任务划分和应用软件设计,最后搭建了整个车门控制系统的实验台架。试验结果表明,该系统运行稳定可靠,达到了设计性能。随着科技的飞速发展,为了提高行车的舒适性,针对轿车的车门控制系统,人们已经设计了基于CAN、LIN等总线系统的完全分布式控制方案。轿车车门电子控制器是每一辆现代轿车都必须安装的模块。轿车车门的基本配置包括电动车窗和中控锁(门锁)、前车门后视镜、转向信号灯、礼貌灯等,这些功能可相对独立配置,具有可裁剪性,可按用户需求增减。由于电子技术的进步和集成电路制造工艺的发展,目前车门模块电子控制器的主流是采用高集成度的芯片控制方式。本文基于英飞凌公司生产的高集成度专用门控芯片TLE8201和BTS781,给出了一种新的车门控制解决方案。 【关键字】:车门ECU设计、硬件电路、XC164CS、TLE8201 第一章设计方法简介 目前流行两款车门ECU方案,即集中式控制方案和分布式控制方案。其中,集中式控制是将电动车窗、后视镜、门锁等负载的控制集中由车身中央控制器完成,这样可降低整体成本,但增加了控制器的复杂性;而且控制过于集中、尺寸偏大,不利于安装、布线和散热。 而分布式控制方案为奥迪、大众等汽车公司所采用,每个车门内的负载由各自的ECU模块单独控制,也可由驾驶员侧ECU通过CAN总线控制。在这种方案中,两个前门ECU连接到CAN总线网络,后面两个车门的ECU可通过CAN 总线或LIN总线方式相互通信,或直接由车身中央控制器模块驱动。分布式方案控制简单,但成本偏高。 本课题组设计了一种“总体分布,局部集中式”的控制方案,其框图如图1所示,即将左侧前后两个车门的控制作为一个ECU模块,右侧前后两个车门的控制作为另一个ECU模块,两个模块之间以及模块与中央控制器之间均以CAN 总线方式连接。
计算机安全与防护
计算机安全与防护 教学目标: 1、知识与技能 (1)了解计算机安全的含义及常见的安全措施; (2)了解计算机病毒的概念、一般特征及传播途径; (3)掌握防毒、杀毒的基本方法,学会主动防范计算机病毒。 2、过程与方法 (1)提高学生分析、解决实际问题的能力,使学生认识网络资源的重要性。 (2)培养学生的自学能力和合作精神。 3、情感态度与价值观 增强技术利用中的责任感和技术创新的使命感,形成良好的网络道德。 4、行为与创新 (1)自觉遵守信息社会中公认的行为规范和道德准则,能够合理地引用他人的观点或使用他人的成果; (2)积极参加各种与信息技术教育有关的创新设计和开发活动;(3)认识信息安全的重要意义。 教学重点:计算机病毒的防治 教学难点:如何更好地培养学生的计算机安全意识 教学方法:合作探究、小组竞赛、启发引导、自主探究 教学过程:
1、情境导入 教师:2017年,因特网上很多用户遭受不明病毒攻击,计算机中所有的文本文件被感染锁定,解锁需付费,这就是“勒索病毒”。 该病毒可通过局域网进行传播,感染局域网内所有的计算机系统,最终导致整个局域网瘫痪。 大家听说过这种计算机病毒吗? 教师:今天,就让我们一起来认识和了解计算机病毒,掌握计算机安全与防护的知识。相信通过大家的共同努力,我们能够更好地使用和维护计算机。 2、新课讲授 (1)计算机病毒 ①、计算机病毒的概念 教师:什么是计算机病毒呢?它和我们平时提到的生物病毒一样吗? 教师:计算机病毒是一种人为编制的程序,这种特殊的程序能够在计算机系统中通过自我复制来传播,在一定条件下被激活并破坏计算机系统,从而造成不可估量的损失。这种程序具有类似生物病毒的特点,如繁殖性、传染性和潜伏性等,所以人们用“计算机病毒”一词来称呼这类破坏性程序。 ②、计算机病毒的特征 请个人学生谈谈感染计算机病毒的过程,再度激发学生的学习兴趣,师生共同探讨教学内容。
自动控制原理及系统仿真课程设计
自动控制原理及系统仿 真课程设计 学号:1030620227 姓名:李斌 指导老师:胡开明 学院:机械与电子工程学院
2013年11月
目录 一、设计要求 (1) 二、设计报告的要求 (1) 三、题目及要求 (1) (一)自动控制仿真训练 (1) (二)控制方法训练 (19) (三)控制系统的设计 (23) 四、心得体会 (27) 五、参考文献 (28)
自动控制原理及系统仿真课程设计 一:设计要求: 1、 完成给定题目中,要求完成题目的仿真调试,给出仿真程序和图形。 2、 自觉按规定时间进入实验室,做到不迟到,不早退,因事要请假。严格遵守实验室各项规章制度,实验期间保持实验室安静,不得大声喧哗,不得围坐在一起谈与课程设计无关的空话,若违规,则酌情扣分。 3、 课程设计是考查动手能力的基本平台,要求独立设计操作,指导老师只检查运行结果,原则上不对中途故障进行排查。 4、 加大考查力度,每个时间段均进行考勤,计入考勤分数,按照运行的要求给出操作分数。每个人均要全程参与设计,若有1/3时间不到或没有任何运行结果,视为不合格。 二:设计报告的要求: 1.理论分析与设计 2.题目的仿真调试,包括源程序和仿真图形。 3.设计中的心得体会及建议。 三:题目及要求 一)自动控制仿真训练 1.已知两个传递函数分别为:s s x G s x G +=+= 22132)(,131)(
①在MATLAB中分别用传递函数、零极点、和状态空间法表示; MATLAB代码: num=[1] den=[3 1] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) num=[2] den=[3 1 0] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) 仿真结果: num =2 den =3 1 0 Transfer function: 2 --------- 3 s^2 + s
计算机安全培训
信息和技术安全 1.公司的保密制度 1.1.文件、传真邮件的收发登记、签收、催办、清退、借阅、 归档由指定人员处理。 1.2.凡涉及公司内部秘密的文件资料的报废处理,必须首先碎 纸,未经碎纸的文件不允许丢弃处理。 1.3.公司员工本人工作所持有的各种文件、资料、电子文档(磁 碟,光盘等),当本人离开办公室外出时,须存放入文件柜或抽 屉,不准随意乱放,更未经批准,不能复制抄录或携带外出。 1.4.未经公司领导批准,不得向外界提供公司的任何保密资料 1.5.未经公司领导批准,不得向外界提供客户的任何资料 1.6.妥善保管好各种财务账册、公司证照、印章 2.电脑保密措施 2.1.不要将机密文件及可能是受保护文件随意存放,文件的存 放在分类分目录存放于指定位置。 2.2.未经领导及他人许可,不要打开或尝试打开他人文件,以 避免泄密或文件的损坏。 2.3.对不明来历的邮件或文件不要查看或尝试打开,以避免计 算机中病毒或木马,并尽快请电脑室人员来检查。 2.4.在一些邮件中的附件中,如果有出现一些附加名是:EXE, COM等可执行的附件或其它可疑附件时,请先用杀毒软件详细 查杀后再使用,或请电脑室人员处理。 2.5.不要随便尝试不明的或不熟悉的计算机操作步骤。遇到计 算机发生异常而自己无法解决时,就立即通知电脑室外,请专 业人员解决。
2.6.不要随便安装或使用不明来源的软件或程序;不要随便运 行或删除电脑上的文件或程序;不要随意计算机参数等。 2.7.收到无意义的邮件后,应及时清除,不要蓄意或恶意地回 寄这些邮件。 2.8.不向他人披露密码,防止他人接触计算机系统造成意外。 2.9.每三个月定期更换密码,如发现密码已泄漏,就尽快更换。 预设的密码及由别人提供的密码应立不能采用。定期用杀毒程 序扫描计算机系统。对于新的软件、档案或电子邮件,应选用 杀毒软件扫描,检查是否带有病毒、有害的程序编码,进行适 当的处理后才可开启使用。 2.10.先以加密技术保护敏感的数据文件,然后才通过公司网络 及互联网进行传送。在适当的情况下,利用数定证书为信息及 数据加密或加上数字签名。 2.11.关闭电子邮件所备有自动处理电子邮件附件的功能,关闭 电子邮件应用系统或其它应用软件中可自动处理的功能,以防 电脑病毒入侵。 2.12.对于不熟的人员,请不要让其随意使用你的计算机,如非 要使用,应有人在其身旁监督。 2.1 3.不要随意将公司或个人的文件发送给他人,或打开给他人 查看或使用。 2.14.在计算机使用或管理上如有任何疑问,请询问电脑室人员。 3.公司的保密措施 3.1.公司中层以上领导,要自觉带头遵守保密制度。 3.2.公司各部门要运用各种形式经常对所属员工进行保密教育, 增强保密观念。
六自由度
物体在空间具有六个自由度,即沿X、Y、Z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。因此,要完全确定物体的位置,就必须清楚这六个自由度。 六自由度运动平台是由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。在加工业可制成六轴联动机床、灵巧机器人等。由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。 空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、滚转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合运动姿态。而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,假设空间运动的目标俯仰、滚转、偏航、上下垂直位移、前后平移和左右平移用α,β,γ,X,Y,Z表示,六个油缸的行程用 L(i), (i=1、2、3、4、5、6)表示。整个运动模型如下: L(i)=TT(α,β,γ,X,Y,Z) 其中,TT是一个空间转换矩阵模型。由此实时算出每一运动时刻液压油缸的行程。液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。 多自由度运动控制 多自由度控制系统中,自由度最多为六自由度,并且六自由度运动控制难度最大,设备及系统最复杂,下面主要介绍我公司设计、生产的六自由度运动台。 六自由度运动平台是由六支直线伺服电动缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只伺服电动缸)执行器)的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出
计算机安全与防护教学设计
“计算机安全与防护教学设计”教学设计 教学设计2010-04-29 13:34:09 阅读37 评论0 字号:大中小订阅 南京市紫东实验学校王芳 一、教材分析 (一)教材依据及内容分析 本节课是江苏省九年义务教育三年制初级中学教科书(上册)信息技术,第二章《管理计算机》第三节《计算机安全与防护》的内容,本节内容具有较大的现实意义和教育意义。 本节是第二章《管理计算机》的最后一节,内容以理论知识形式呈现,较为枯燥,学生不易接受。在这种情况下,教师一般会尽量采用一些生活中的实例来提高学生的学习兴趣。我非常同意这样的做法,但如果仅仅靠实例吸引学生是不够的,还需要学生主动学习。在本节课中主要有两个内容——计算机病毒与计算机安全,本节课的核心目标是为了能让学生“主动”获取知识、“主动”进行计算机病毒的防治、“主动”遵守网络上的道德规范,“主动”形成使用计算机的良好习惯,所有的目标都围绕着“主动”两个字。 如何能让不同的学生更好地“主动”起来,这就是我在下面两个教学设计中即将展示的内容。 (二)教学目标: 1、知识与技能: (1)了解计算机病毒的概念、一般特征及传播途径 (2)掌握防毒、杀毒的基本方法,学会主动防范计算机病毒 (3)了解计算机安全的含义及常见的安全措施 2、过程与方法 (1)提高学生分析、解决实际问题的能力 (2)培养学生的自学能力和合作精神 3、情感态度与价值观 增强技术利用中的责任感,形成良好的网络道德与正确使用计算机的良好习惯。 (三)教学重点和难点: 教学重点:掌握计算机病毒的防治 教学难点:如何更好地培养学生的计算机安全意识 二、设计思想: 由于学生、教师、学校的实际情况不同,在本文中我将展示两种学情下的教学设计,希望能对其他老师有一定的帮助。 (一)教学对象分析 教学对象是初一年级的学生,初中学生活泼好动、好奇心强、求知欲旺,在课堂中很容易受其它因素的影响,在课堂中对知识的获取很大程度上还基于感性的经验,还不能进行较为系统的小结,这是教师在课堂教学中需要重点关注学生的部分。 初一的学生,爱动爱玩,如果课堂教学拘泥于教师一板一眼的传授知识,可能不到一会学生的注意力就不集中,开始做自己的事情了。因此,选择什么样的教学模式进行教学也很重要。 ◆学情一:学生家中多数有计算机,知识面较广,有一定的见识,具备一定的学习能力以及分析问题的能力,班级中有良好的学习氛围。针对这种情况,在课堂教学中可以更倾向于体现学生的主体地位,在教学设计中适当增加学生表现的机会,教师只负责“穿针引线”。 ◆学情二:学生家中少数有计算机,知识面较窄,灵活性不大。针对这种情况,在课堂教学中可以适当增加教师的引导与指导。 (二)教学指导思想
基于PLC的控制系统仿真平台的应用
龙源期刊网 https://www.wendangku.net/doc/069294596.html, 基于PLC的控制系统仿真平台的应用 作者:罗卫东 来源:《卷宗》2012年第02期 摘要:仿真软件在PLC设计中占有举足轻重的地位,因为对于PLC系统的新编程序来说实际操作会有很大的风险,PLC的一个错误指令就会造成设备和操作人员不可预计的伤害。在网络上,用户可以安装这种软件,从开放式的资料库中获取所需要的各种功能部件。本文就从仿真软件在网络以及PLC设计中的应用方面来进行探索。 关键词:仿真软件;网络应用;PLC设计 仿真软件是通过建立网络设备和网络链路达到网络应用的标准,这是种通过模拟网络流量就可以获取到网络设计中所需要的相关数据的仿真软件。现阶段,我国工业发展都朝着高速大型化和自动化的方向发展,重大生产设备的运用使得成本日益增高,对运行操作人员素质要求也日益提高。由于仿真系统可以近乎真实的贴近现场实际,同时因为不需要到现场实际节省了很大的操作空间,而快速提高了现场的调试效率,降低了用于调试系统的费用和风险。 一、仿真软件的功能 1、控制程序运行 在PLC设计中仿真软件可以仿真其过程映像的输入输出,在仿真窗口改变运行程序的输入变量的ON/OFF状态进行控制程序,观察输出的变量状态能否符合要求、程序运行能否达到正确运行的目标,起到监视程序运行结果的作用。 2、防止程序出错 在程序运行过程中,仿真软件会通过对程序的检测修改定时器、计数器等。也可以通过程序自动运行或手动复位定时器。这样的检测不仅能够发现程序中的错误和缺陷,还可以使PLC 设计更加的完美。也可以在PLC设计过程中使用软件来改变它的控制过程,而PLC使用者对程序的编写和调试是必不可少的。 3、拥有储存记忆功能 仿真软件模拟是针对软元件、缓冲存储器、外设输入/出的读写。它的这项功能既可以存储PLC内的软元件、存储器的缓冲存储器的数据,并可以将这种数据使用到以后的调试工作中。如果用户想要收集相关网络设备中的某些特殊代码时,可以通过层次上的编程来收集自己感兴趣的网络代码。但在网络信息相对复杂的环境下,使用者的程序必须进行现场调试,而在这个过程中往往会出现一些差错,使用者直接将程序应用到实际操作系统中进行控制调试的话,会被设备带来一定的未知风险。
计算机安全与防护
课题:计算机安全与防护 教学目的: 1.知识与技能 (1)了解计算机安全的含义及常见的安全措施。 (2)了解计算机病毒的概念、一般特征及传播途径。 (3)掌握防毒、杀毒的基本方法,主动防范病毒。 2.过程与方法 (1)提高学生分析、解决实际问题的知识水平与操作能力,认识网络资源的重要性。 (2)培养学生的自学能力和合作精神。 3.情感态度与价值观 (1)关注与日常生活和学习密切相关的信息技术新发展,热心参加与信息技术相关的活动,并积极利用信息技术支持其他学科的学习。 (2)增强技术利用中的责任感和技术创新的使命感,形成良好的网络道德。 4.行为与创新 (1)自觉遵守信息社会中公认的行为规范和道德准则,能够合理地引用他人观点或使用他人成果。 (2)积极参与各种与信息技术教育有关的创新设计与开发活动。(3)认识信息安全的重要意义。
教学准备:教学资料光盘;“奇虎360安全卫士”软件;将3~4名学生分为一组。 教学方法:合作探究学习、小组竞赛学习、启发引导学习、自主探究学习。 教学过程: 1.情境导入 2006年12月27日,互联网上很多用户遭受不明病毒攻击,计算机中所有可执行的文件.exe都变成一种“熊猫烧香”的图案,中毒症状表现为系统蓝屏、频繁重启、硬盘数据被破坏等。该病毒可通过局域网进行传播,感染局域网内所有计算机系统,最终导致整个局域网瘫痪。大家听过或见过这种计算机病毒吗?(学生回答) 今天就让我们一起来认识和了解计算机病毒以及关于计算机安全与防护的知识,相信通过大家的共同努力,我们能够更好地使用和维护计算机。 2.新课讲授 (1)计算机病毒 计算机病毒的概念 那什么是计算机病毒呢?它和我们平时提到的生物病毒一样吗? 学生带着问题阅读教材,并总结以上问题;老师给予评价、鼓励。
并联六自由度运动平台
并联六自由度运动平台 1.概述 并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。 图0-1:六自由度及其坐标系定义图 我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。 六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。 2.系统组成 2.1液压伺服类 典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。 液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。 控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。 控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。 2.2 电动伺服类 电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增 加运动控制单元。具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。 3.主要技术参数 以下参数为液压类平台典型值,具体可按用户要求设计制造。 3.1平台主要参数 平台最大负载:静态≥2000KG,动态≥3000KG。 上平台球铰分布园直径1400mm,相邻球心距离157mm; 下平台球铰分布园直径1600mm,相邻球心距离167mm; 伺服缸最小球铰球心距离800mm,最大长度1200mm;(采用Φ63/45~400缸体)。 平台初始高度约700mm。 3.2 泵站技术指标 额定流量:90L/min 最大系统压力:12Mpa; 泵站电机功率:22KW; 空间尺寸:1400×1200×1320 3.3 运动参数 伺服缸运动速度≥200mm/S;有效行程≥400mm。 主要运动参数如下表:
计算机安全与防范措施
随着计算机技术的飞速发展,计算机已经成为社会发展的重要组成部分。它涉及到政府、经济、文化、军事等诸多领域。由于计算机网络组成形式多样性、终端分布广和网络的开放性、互联性等特征,致使网络信息容易受到来自黑客窃取、计算机系统容易受恶意软件攻击,因此,计算机的安全与保密成为一个重要的话题。 病毒是一段程序,它和生物病毒一样,具有复制和传播的能力。计算机病毒不是独立存在的,而是寄生在其他可执行程序中,具有很强的隐蔽性和破坏性,一旦工作环境达到病毒发作的要求,便影响计算机的正常工作,甚至使整个系统瘫痪。计算机病毒从广义上讲是指能够通过自身复制传染而引起计算机故障,破坏计算机数据的一种程序。自从第一个计算机病毒被检测出来后,计算机世界便笼罩在一片“病毒”的阴影中,几乎每位用户都曾经受到过病毒的袭击。通常发作的病毒能造成数据丢失、网络阻塞甚至硬件损伤。 病毒一般通过以下的途径传播。可携带磁盘:可携带磁盘如软盘、硬盘、磁带机、光盘等都是病毒传播的最佳途径。由于这些磁盘在不同的计算机中交叉使用,一旦其中一台计算机感染上病毒,其他计算机则都不能幸免于难。互联网下载:随着Internet 技术的迅猛发展,现在使用计算机的人们几乎每天都从网络上下载一些有用的资料信息。同时,Internet 是个大舞台,也是那些病毒滋生的温床,当人们从Internet 下载各种资料软件的同时,无疑会给病毒的提供了良好的侵入通道。有时候病毒会附着在下载的程序中,当运行了下载程序时,病毒便会自动开始潜伏在计算机中了。电子邮件:电子邮件现在已经成为了病毒传播的最主要途径,通常病毒文件会伪装成一个朋友发来的邮件,当用户打开邮件浏览时,病毒便会不知不觉的潜伏到计算机。因此当收发电子邮件时遇到不明主题或接收到不明的附件时,千万不要贸然打开。 如果用户的计算机联入互联网,则在日常的上网活动中,则可能有病毒安全、密码安全、电子邮件安全、网络黑客等潜在危险。对个人用户来说,来自网络的侵害主要包括病毒侵害、特洛伊木马程序、电子邮件病毒、不良站点等。除开病毒的影响外,在互联网上还活跃着一些搞破坏为目的的计算机用户,他们被称为黑客(Hacker),也称为“骇客”,它们以破坏数据、窃取资料、盗用密码为目的。“黑客”大都是一些精通计算机的程序员,他们对于操作系统和编程语言有着深刻的认识,乐于探索操作系统的奥秘,了解系统中的漏洞及其原因所在。他们近乎疯狂钻研更深入的计算机系统知识并与他人共享成果。从信息安全这个角度来说,“黑客”的普遍含意是指对计算机系统的非法侵入者。多数黑客痴迷计算机,他们毫无顾忌地非法闯入信息禁区或者重要网站,以窃取重要的信息资源、篡改网址信息或者删除内容为目的,于是黑客又成为入侵者、破坏者的代名词。 普通计算机用户要将黑客阻挡于自己的计算机之外,最简单的方法是安装一款防火墙软件。防火墙是一种类似于杀毒软件的反病毒软件,它的主要功能是阻止来自互联网的有害信息,当用户向互联网发送信息或者从互联网下载信息时,防火墙软件都会实时监测,一亘发现有害的信息,便会自动阻止该信息,并且给出提示。 文件和打印共享应该是一个非常有用的功能,但在不需要它的时候,也是黑客入侵的很好的安全漏洞。所以在没有必要“文件和打印共享”的情况下,我们可以将它关闭。有很多入侵都是通过这个账号进一步获得管理员密码或者权限的。如果不想把自己的计算机给别人当玩具,那还是禁止的好。在默认的情况下,任何用户都可以通过空连接连上服务器,枚举账号并猜测密码。因此,我们必须禁止建立空连接。黑客经常利用一些网络探测技术来查看我们的主机信息,主要目的就是得到网络中主机的IP地址。我们还应在电脑中安装并使用必要的防黑软件,杀毒软件和防火墙都是必备的。在上网时打开它们,这样即便有黑客进攻我们的安全也是有保证的.有些黑客可能会冒充某些正规网站的名义,然后编个冠冕堂皇的理由寄一封信给你要求你输入上网的用户名称与密码,如果按下“确定”,你的帐号和密码就进了黑客的邮箱。所以不要随便回陌生人的邮件,即使他说得再动听再诱人也不上当。
MATLAB与控制系统仿真实验书-学生
实验总要求 1、封面必须注明实验名称、实验时间和实验地点,实验人员班级、学号(全号)和姓名等。 2、内容方面:注明实验所用设备、仪器及实验步骤方法;记录清楚实验所得的原始数据和图像,并按实验要求绘制相关图表、曲线或计算相关数据;认真分析所得实验结果,得出明确实验结论。 3、图形可以打印出来并剪贴上去,文字必须用标准试验纸手写。
实验一MATLAB绘图基础 一、实验目的 了解MATLAB常用命令和常见的内建函数使用。 熟悉矩阵基本运算以及点运算。 掌握MATLAB绘图的基本操作:向量初始化、向量基本运算、绘图命令plot,plot3,mesh,surf 使用、绘制多个图形的方法。 二、实验内容 建立并执行M文件multi_plot.m,使之画出如图的曲线。
三、实验方法(参考程序) 四、实验要求 1.分析给出的MA TLAB参考程序,理解MA TLAB程序设计的思维方法及其结构。 2.添加或更改程序中的指令和参数,预想其效果并验证,并对各语句做出详细注释。对不 熟悉的指令可通过HELP查看帮助文件了解其使用方法。达到熟悉MA TLAB画图操作的目的。 3.总结MATLAB中常用指令的作用及其调用格式。 五、实验思考 1、实现同时画出多图还有其它方法,请思考怎样实现,并给出一种实现方法。 (参考程序如下)
%hold on;hold off命令
2、思考三维曲线(plot3)与曲面(mesh, surf)的用法,(1)绘制参数方程 233,)3cos(,)3sin()(t z e t t y e t t t x t t ===--的三维曲线;(2)绘制二元函数 xy y x e x x y x f z ----==22)2(),(2 ,在XOY 平面内选择一个区域(-3:0.1:3,-2:0.1:2),然后绘 制出其三维表面图形。(以下给出PLOT3和SURF 的示例)
六自由度电动平台控制系统设计研究
30 收稿日期:2011-09-05 六自由度电动平台控制系统设计研究 金 伟1 ,杨 斌 2 (1兰州城市学院培黎石油工程学院 甘肃兰州,730070) (2兰州城市学院 甘肃兰州,730070) 摘 要:采用多轴运动控制器MAC作为控制主体,基于“工控机+运动控制卡”的模式,构建了一个开放式的六 自由度电动平台控制系统。实现了六自由度电动平台的基本控制功能。建立了六自由度电动平台的故障保护系统及故障监控系统,并详细介绍了系统组成部分及实现过程。 关键词:故障保护系统;故障监控系统;六自由度电动平台;MAC Abstract: This dissertation applies the current high-powered servo controller MAC, based on “IPC+MAC ”,constructed an open numerical control system of 6-dof electric platform. The control software is designed with the functional modularization. The basic control functions of 6-dof electric platform are realized.Fault Protection System and Fault Monitoring System is established, and the components and the implementation process is described in detail. Key words: platform ; Fault protection system ; Fault monitoring system ; 6-dof electric- MAC 中图分类号:TP13 文献标识码:A 文章编号:1001-9227(2011)06-0030-03 0 绪 论 近年来由于电机伺服系统性能的大幅提升以及电动缸控制性能的优越性,在小载荷和高精度控制领域电机驱动平台系统有取代液压驱动平台系统的趋势,因此开展对六自由度电动平台运动系统的研究有着非常重大的意义与巨大的发展前景。 本论文围绕搭建六自由度电动平台的控制系统实现实时运动控制而展开。本控制系统采用“工控机+多轴运动控制卡”作为硬件基础,搭建了本六自由度电动平台的硬件控制系统;开发出六自由度电动平台的控制软件,建立起六自由度电动平台软件控制系统,实现六自由度电动平台的实时控制。构建六自由度电动平台故障保护系统及故障监控系统,实现电动平台的基本故障保护与远程故障监控。 1 六自由度电动平台的结构与特点 六自由度电动平台由下平台(固定底座)、运动平台、虎克铰和六个作动器(伺服电动缸)组成。伺服电动缸通过虎克铰以并联的形式将固定底座和运动平台连接起来,因而六个伺服电动缸均可独立地伸缩。通过六个伺服电动缸的协调伸缩,相对于固定下平台,运动上平台就可以灵活实现空间六个自由度方向上的位姿运动。该结构具有以下特点: (l)同串联机构的悬臂梁比较,六自由并联机构的运动平台由6个作动器同时支撑,结构稳定,刚度较大,且承载能力大; (2)串联式机器人的传动系统及驱动电动机大都固定在运动的大小臂上,导致系统惯性增加,动力性能恶化,而并联式则可将驱动电机置于固定底座上,减小了运动负 荷,动力性能较好。 (3)串联机构的误差是相关运动关节误差的积累和放大,因此误差大而精度低。而并联机构则误差趋向平均化,不存在如此的误差积累和放大关系,因而误差小、精度高; (4)并联式机器人组成结构往往为对称式,其各向同性好; (5)在运动学分析方面,串联机构正解容易,反解非常困难,而并联机构则与之相反,正解困难,反解容易。多自由度机构运动过程中,需要进行实时反解运算,并联式容易实现,而串联式却十分不易。2 控制系统硬件体系结构2.1 控制系统逻辑结构 在自动控制系统中,输出量以一定准度随着输入目标值的变化而变化的系统称为伺服系统。六自由度电动平台硬件控制系统的目标是:输入预定的目标位姿曲线,驱动伺服电机使电动缸推杆按照位姿曲线进行伸缩运动。因此本文要搭建的六自由度电动平台控制系统就是伺服系统。要实现对六自由度平台良好的控制,构建一个精度高,响应快速,稳定性好的伺服系统显然尤为关键。电动平台硬件系统由工控机、运动控制卡、数字式直流伺服放大器、伺服电机及检测原件组成。 本系统以研华工控机(IPC)作为上位机,以多轴运动控制器MAC为下位机,电气伺服部分采用富士交流伺服电机,机械传动部分采用高精密滚珠丝杠。控制软件通过MAC系列运动控制卡发送脉冲给富士电机伺服放大器,从而驱动伺服电动缸按照给定轨迹完成伸缩运动。在电动缸运动的同时,通过伺服电机中编码器将实际位置脉冲信号反馈到MAC运动控制卡的接口,从而更准确地控制动平台 六自由度电动平台控制系统设计研究 金 伟,等