可编程序控制器2-2

2—2 定时器
车库自动门控制系统,当感应开关探测到车接近自动门时,结PLC 发出控制信号,延时5s 后,驱动开门电动机打开自动门,门到位后停止;车进门后,自动门自动关闭,如图2—50所示。
基本知识
一、定时器工作特点及时
序图
1、定时器的使用
PLC 中定时器可在程序中
作延时控制。FX 1S 系列可编程
序控制器的定时器具有以下3
种类型,见表2—6。
可编程序控制器中的定时
器是根据时钟脉冲累积计时
的,时钟脉冲有1ms 、10ms 、
100ms 3种不同周期。定时器
编程的梯形图如图2—51所
示。
梯形图中,K100是定时器
T1的常数设定值,定时器T1
延时时间为:
s s t 101.0100=?=
式中:100由常数设定值
决定;0.1s 是定时器T1的时间
脉冲周期
(s ms T 1.0100==)。
当X0的常开触点闭
合时,定时器T1的线圈得
电,定时器开始延时,10s
埋单一到,定时器T1的常
开触点瞬间恢复而断开,
常闭触点瞬间恢复闭合。
定时器工作时,除了
有和自己编号对应的存储器外,同时还有一个常数设定值寄存器和一个当前值寄存器一起
工作。常数设定值寄存器的数据是程序赋予的计时时间,如图2—51中的K100,当前值
寄存器存储的数据是定时器的设定值(延时的时间长短)。这些寄存器为16位二进制存储
器。定时器满足计时条件开始计时(如图2—50中的X0闭合),当前值寄存器则开始计
数,当寄存器的数据与常数设定值寄存器数据相等时,定时器动作,其常开触点闭合,常
闭触点断开,并通过程序作用于控制对象,达到迁时控制的目的。
积算定时器在计时条件失去或PLC 失电时,其当前值寄存器的数据及触点状态均可
保持,可“累积”计时时间,所以称为“积算”,这主要是由于积算定时器的当前值寄存器及触点都有记忆功能,其复位时必须在程序中加入专门的复位指令。如图2—52b 中X1即为复位条件,当X1常开触点接通时,执行“RST T63”指令,T63的当前值寄存器清零,同时触点复位。
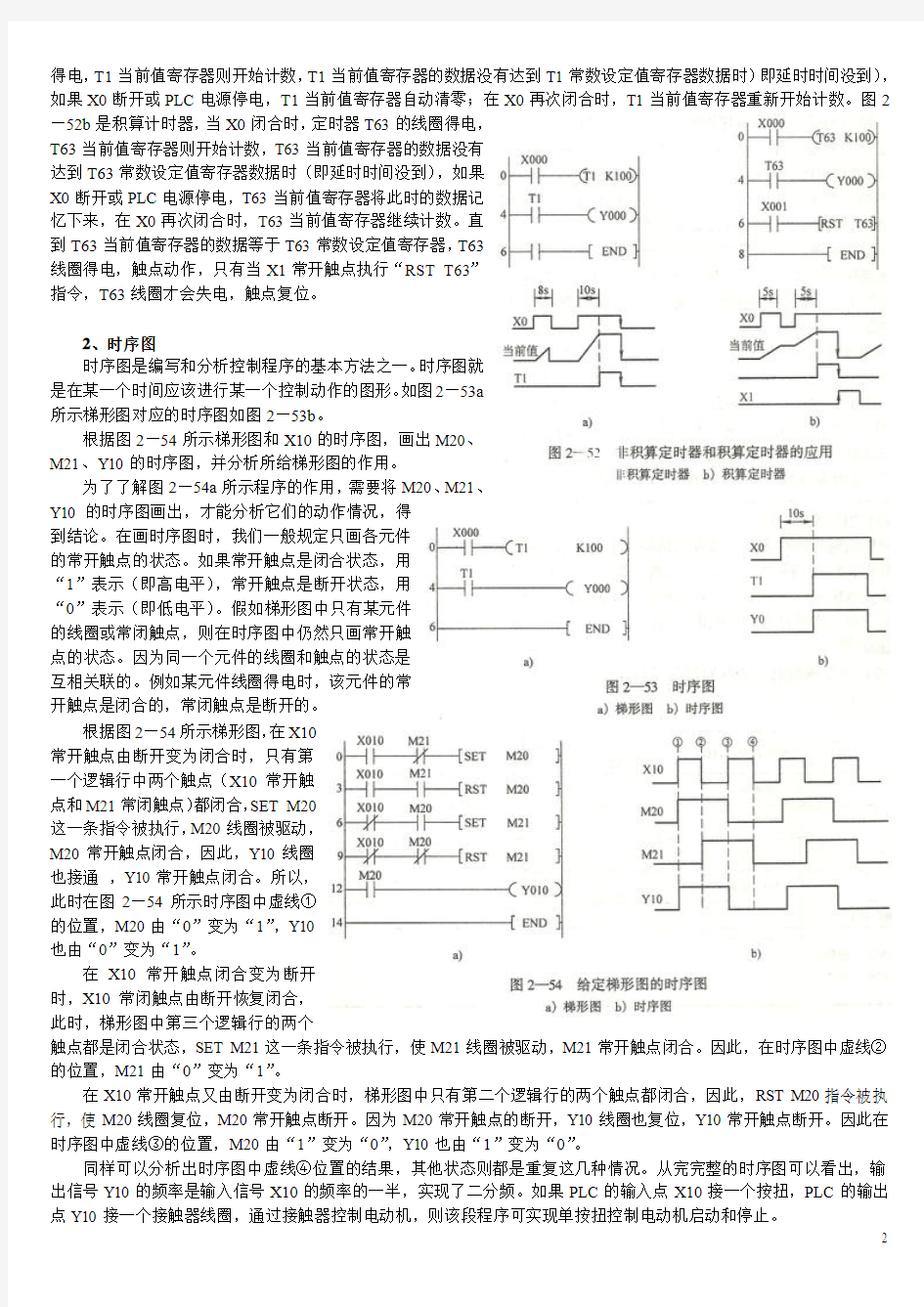
非积算定时器和积算定时器的应用如图2—52所示,图2—52a 是非积算定时器,当X0闭合时,定时器T1的线圈
得电,T1当前值寄存器则开始计数,T1当前值寄存器的数据没有达到T1常数设定值寄存器数据时)即延时时间没到),如果X0断开或PLC电源停电,T1当前值寄存器自动清零;在X0再次闭合时,T1当前值寄存器重新开始计数。图2
—52b是积算计时器,当X0闭合时,定时器T63的线圈得电,
T63当前值寄存器则开始计数,T63当前值寄存器的数据没有
达到T63常数设定值寄存器数据时(即延时时间没到),如果
X0断开或PLC电源停电,T63当前值寄存器将此时的数据记
忆下来,在X0再次闭合时,T63当前值寄存器继续计数。直
到T63当前值寄存器的数据等于T63常数设定值寄存器,T63
线圈得电,触点动作,只有当X1常开触点执行“RST T63”
指令,T63线圈才会失电,触点复位。
2、时序图
时序图是编写和分析控制程序的基本方法之一。时序图就
是在某一个时间应该进行某一个控制动作的图形。如图2—53a
所示梯形图对应的时序图如图2—53b。
根据图2—54所示梯形图和X10的时序图,画出M20、
M21、Y10的时序图,并分析所给梯形图的作用。
为了了解图2—54a所示程序的作用,需要将M20、M21、
Y10的时序图画出,才能分析它们的动作情况,得
到结论。在画时序图时,我们一般规定只画各元件
的常开触点的状态。如果常开触点是闭合状态,用
“1”表示(即高电平),常开触点是断开状态,用
“0”表示(即低电平)。假如梯形图中只有某元件
的线圈或常闭触点,则在时序图中仍然只画常开触
点的状态。因为同一个元件的线圈和触点的状态是
互相关联的。例如某元件线圈得电时,该元件的常
开触点是闭合的,常闭触点是断开的。
根据图2—54所示梯形图,在X10
常开触点由断开变为闭合时,只有第
一个逻辑行中两个触点(X10常开触
点和M21常闭触点)都闭合,SET M20
这一条指令被执行,M20线圈被驱动,
M20常开触点闭合,因此,Y10线圈
也接通,Y10常开触点闭合。所以,
此时在图2—54所示时序图中虚线①
的位置,M20由“0”变为“1”,Y10
也由“0”变为“1”。
在X10常开触点闭合变为断开
时,X10常闭触点由断开恢复闭合,
此时,梯形图中第三个逻辑行的两个
触点都是闭合状态,SET M21这一条指令被执行,使M21线圈被驱动,M21常开触点闭合。因此,在时序图中虚线②的位置,M21由“0”变为“1”。
在X10常开触点又由断开变为闭合时,梯形图中只有第二个逻辑行的两个触点都闭合,因此,RST M20指令被执行,使M20线圈复位,M20常开触点断开。因为M20常开触点的断开,Y10线圈也复位,Y10常开触点断开。因此在时序图中虚线③的位置,M20由“1”变为“0”,Y10也由“1”变为“0”。
同样可以分析出时序图中虚线④位置的结果,其他状态则都是重复这几种情况。从完完整的时序图可以看出,输出信号Y10的频率是输入信号X10的频率的一半,实现了二分频。如果PLC的输入点X10接一个按扭,PLC的输出点Y10接一个接触器线圈,通过接触器控制电动机,则该段程序可实现单按扭控制电动机启动和停止。
二、指令理解
按照表2—7所示步骤进行,加深对定时器的理解。
三、指令应用
1、自动门控制程序
当车接近自动门时,感应开关给PLC发出信号,X0线圈得电,X0常开触点闭合,定时器T0线圈得电,到达延
时时间后,T0常开触点闭合,控制Y1线圈得电,PLC输
出点Y1有信号输出KM1线圈得电,KM1主触点闭合,
自动门驱动电动机正转,自动门上升,当自动门上升到位
后,停止上升,梯形图如图2—56所示。为保证自动门是
处于关门状态时(压合门的下限传感器,X3常开触点闭
合),执行这段程序,采用X3与X0串联来控制T0线圈。
车进车库后,另一个感应开关接受到信号,X1的常
开触点闭合,当自动门是处于开门状态时(压合门的上限
传感器,X2常开触点闭合),就给PLC发出信号,通过定
时器T1延时,控制Y2线圈得电,PLC输出点Y2有信号
输出,KM2线圈得电,KM2主触点闭合,控制电动机反
转,自动门下降,当自动门下降到位后,停止下降。梯形
图如图2—57所示。
当车驶出车库接近自动门时,X1、X3常开触点闭合,完成自动门延时上升动作;出车库后,X0、X2常开触点闭合,完成自动门延时下降动作,梯形图如图2—58。
2、每次接通一个扫描周期或延时一个扫描周期动作
接通一个扫描周期可以用微分电路实现,微分
电路分上升沿微分脉冲电路和下降沿微分脉冲电
路,下面分别讨论。
(1)用基本逻辑指令实现
1)上升沿微分脉冲电路 PLC 是以循环扫描
方式工作的,在PLC 第一次扫描时,输入X0由OFF
变为ON 时,M100、M101线圈接通,但处在第一
行的M101的常开触点仍接通,因为该行已经扫描
过了,等到PLC 第二次扫描时,M101的触点才断
开,Y0线圈断开。Y0的接通时间为一个扫描周
期,如图2—59所示。
2)下降沿微分脉冲电路 如图2—60所示,
当X0由ON 变为OFF 时,M100接通一个扫描周
期,则Y0输出一个扫描周期。
(2)用脉冲微分指令实现
脉冲微分指令主要用于检测输入脉冲的上升
沿或下降沿,当条件满足时,产生一个很窄的脉
冲信号(一个扫描周期)输出。
用PLS 指令和PLF 指令实现接通一个扫描周
期的梯形图和时序图,如图2—61所示。
四、扩展应用
FX 系列PLC 的定时器为接通延时定时器。即定时器线圈通电后,开始延时,到达设定时间后,定时器的常开触点闭合,常闭触点断开。在定时器线圈断电时,定时器的触点瞬间复位。利用PLC 中的定时器可以设计出各种各样的时间控制程序,其中有长延时程序、时钟脉冲程序、接通延时和断开延时等控制程序。
1、定时器串级使用
定时器定时时间的长短由常数设定值决定,FX 1S 系列PLC 中,编号为T0~T31的定时器常数设定值的取值范围为:1~32767,即最长的定时时间为:s t 7.32761.032767=?=,不到1h 。如果需要设计定时时间为1h 或更长的定时器,则可采用定时器串级使用的方法实现长时间延时。
图2—62所示是定时时间为1h 的时间控制程序。由图2—62b 所示的时序图可以看到,输入触点X14闭合后,经
过1h(3600s)的延时,输出信号Y4才接通,从而实现了长时间定时。为实现这种功能,采用两个定时器T14和
T15串级使用,当T14开始定时后,
经1800s延时,T14的常开触点闭
合,使T15再开始定时,又经1800s
的延时,T15的常开触点闭合,输
出继电器Y4线圈接通。这样,从
输入触点X14接通,到Y4产生输
出信号,其延时时间为:
1800+1800=3600s=1h。定时器串级
使用就是先启动一个定时器定时,
时间一到,用第一个定时器的常开
触点控制第二个定时器定时,如此
下去,使用最后一个定时器的常开触点去控制所要控制的对象。
定时器串级使用时,其总的定时时间为各定时器常数设定值之和。N个定时器串级使用,其最长定时时间为:3276.7×N(s)。
2、断开延时控制程序
PLC中定时器都是接通延时,
图2—63所示为断开延时的梯形
图和动作时序图,程序的运行过程
是:当定时器启动信号X13接通
时,M0线圈接通并自锁,输出继
电器Y3线圈接通,这时定时器
T13因X13常闭触点断开而没有
定时。当启动信号X13断开时,X13的常闭触点恢复闭合,T13线圈得电,开始定时。经过10s延时后,T13常闭触点断开,使M0复位,输出继电器Y3线圈失电,Y3常开触点断开,从而实现从输入信号X13断开,经10s(定时器常数设定值决定)延时后,输出信号Y3才断开的延时功能。
3、分频器
用PLC可以实现对输入信号的
任意分频。,如图2—64所示是一个
脉宽可调电路:待分频的脉冲信号
加在X0端,在第一个脉冲信号到来
时,M100产生一个扫描周期的脉
冲,使M100的常开触点闭合一个扫
描周期。这时确定Y0状态的前提是
Y0置0,M100置1,图中Y0工作条件的两个支路中1号支路接通,2号支路断开,Y0置1,第一个脉冲到来一个扫描周期后,M100置0,Y0置1,在这样的重要条件下分析Y0的状态,第二个支路使Y0保持置1。当第二个脉冲到来时,M100产生一个扫描周期的单脉冲,这时Y0置1,M100也置1,这使得Y0的状态由置1变为置0。第二个脉冲到来一个扫描周期后,Y0置0且M100也置0直到第三个扫描到来时Y0及M100的状态和第一个脉冲到来时完全相同,Y0的状态变化将重复前面讨论的过程。通过以上的分析可知,X0每送两个脉冲,Y0产生一个脉冲,完成了对输入信号的分频。
4、连续脉冲的程序
在PLC程序设计中,也经常需要一系列连
续的脉冲信号作为计数器的计数脉冲或其他作
用。如图2—65和图2—66所示梯形图就是能产
生连续脉冲的基本程序。
图2—65中,利用辅助继电器M0产生一个脉宽为一个扫描周期,脉冲周期为二个扫描周期的连续脉冲。该梯形图是利用PLC的扫描工作方式来设计的。当X0常开触点闭合后,第一次扫描到M0常闭触点时,它是闭合的,于是,M0线圈得电。当第二次从头开始扫描,扫描到
M0的常闭触点时,因M0线圈得电后其常闭触
点已经断开,所以使M0线圈失电,这样,M0
线圈得电时间为一个扫描周期。M0线圈不断连
续地得电、失电,其常开触点也随之不断连续地
闭合、断开,就产生了脉宽为一个扫描周期的连
续脉冲信号输出,脉冲宽度和脉冲周期不可调
节。
图2—66中,利用定时器T0产生一个周期可调的连续脉冲。当X0常开触点闭合后,第一次扫描到T0常闭触点时,它是闭合的,于是,T0线圈得电,经过1s的延时,Y0常闭触点断开。T0常闭触点断开后的下一个扫描周期中,当扫描到T0常闭触点时,因它已断开,使T0线圈失电,T0常闭触点又随之恢复闭合,这样,在下一个扫描周期扫描到T0常闭触点时,又使T0线圈得电,重复以上动作。T0的常开触点连续闭合、断开,就产生了脉宽为一个扫描周期、脉冲周期为1s的连续脉冲,改变T0常数设定值,就可改变脉冲周期。
5、接通延时控制程序
图2—67所示程序为接通延时控制程序,程
序的运行过程是:定时启动信号X10接通,定时
器T10开始计时,经过10s延时后,T10的常开触
点接通,使输出继电器Y0线圈得电,Y0常开触
点闭合。当X10复位时,T10线圈断电,其常开
触点断开,输出继电器Y0线圈也失电,Y0常开
触点断开。在该接通延时控制程序中,如果X10
接通时间不够10s,则定时器T10和输出继电器Y0都不动作。由图2—67b所示时序图可以看到从输入信号X10接通瞬间开始经过10s延时,Y0才有信号输出,所以称为接通延时型控制程序。
图2—68所示程序为限时控制程序,该时间控
制程序延时的运行过程是:当启动定时信号X11接
通后,定时器T11和输出继电器Y1线圈得电,T11
定时器开始定时,经过10s延时后,T11的常闭触点
断开,Y1线圈失电,Y1常开触点由闭合恢复为断
开。由图2—68b所示时序图可看出,该段程序的特
点是,定时启动信号X11接通时间少于10s(T11的
常数设定值决定),则输出继电器Y1接通时间与X11
接通时间一样。当X11接通时间大于10s时,则Y1
接通时间为10s,即Y1最长接通时间为10s。该程
序属于限时控制程序,可将负载的工作时间限制在规定的时间内。
图2—69是另一种限时控制程序。该时间控制程序的运行过程是:当定时启动信号X12接通并且接通时间大于10s 时,定时器T12和输出继电器Y2线圈都得电,Y2常开触点闭合自锁,T12开始定时,经10s延时,T12常闭触点断开,使Y2常开触点失去自锁作用。这样,当触点X12
触点断开后,T12和Y2线圈随之失电,T12和Y2
的触点都复位。当X12接通时间小于10s时,因Y2
常开触点闭合自锁,使T12和Y2线圈在X12常开
触点断开后能继续得电,经过10s延时,T12常闭触
点才断开,T12和Y2才随之失电,T12和Y2触点
复位。由时序图可以看出这种限时控制程序的特点
是:当定时启动信号X12接通时间少于10s时,则
输出信号Y2接通时间保持10s,当X12接通时间大
于10s时,则Y2接通时间与X12接通时间相同,即输出信号Y2最少接通时间为10s。在工程上采用这种程序,可控制负载的最少工作时间。
6、接通延时和断开延时控制程序
图2—70所示是接通延时和断开延时程序的梯形图和动作时序图。程
序运行过程是:当启动信号X13接通时,M0线圈接通并自锁,T12线圈
得电,开始定时。由于接通时间不到10s X13即松开,所以Y3不会工作。
如果X13接通时间越过10s,T12触点闭合,Y3工作。当启动信号X13
断开时,X13的常闭触点恢复闭合,T13线圈得电,开始定时,越过10s
后,T13常闭触点断开,Y3停止工作。从而实现输入信号X13接通10s
(定时器常数设定值决定)后Y3线圈工作,输入信号X13断开10s后
Y3线圈才不工作的延时功能。
为了让大家学好PLC的课程,欢迎大家课程范围内多讨论、多提问。只有把这里的内容学好了,才能更好地举一反三。联系方式:加我的QQ就行。谢谢。
另外已发的PLC应用软件是用来配合学习PLC用的,请大家将下图中的的Fx – pcs – winC330(中文版)PLC应用软件下载后,安装在自己用的电脑中,便于以后PLC的学习。
PLC系统组成及各部分的功能
PLC系统组成及各部分的功能 一.系统组成。 二.各部分的作用。 1.CPU运算和控制中心 起“心脏”作用。 纵:当从编程器输入的程序存入到用户程序存储器中,然后CPU根据系统所赋予的功能(系统程序存储器的解释编译程序),把用户程序翻译成PLC内部所认可的用户编译程序。横:输入状态和输入信息从输入接口输进,CPU将之存入工作数据存储器中或输入映象寄存器。然后由CPU把数据和程序有机地结合在一起。把结果存入输出映象寄存器或工作数据存储器中,然后输出到输出接口、控制外部驱动器。 组成:CPU由控制器、运算器和寄存器组成。这些电路集成在一个芯片上。CPU通过地址总线、数据总线与I/O接口电路相连接。 2.存储器 具有记忆功能的半导体电路。 分为系统程序存储器和用户存储器。 系统程序存储器用以存放系统程序,包括管理程序,监控程序以及对用户程序做编译处理的解释编译程序。由只读存储器、ROM组成。厂家使用的,内容不可更改,断电不消失。用户存储器:分为用户程序存储区和工作数据存储区。由随机存取存储器(RAM)组成。用户使用的。断电内容消失。常用高效的锂电池作为后备电源,寿命一般为3~5年。3.输入/输出接口 (1)输入接口: 光电耦合器由两个发光二极度管和光电三极管组成。 发光二级管:在光电耦合器的输入端加上变化的电信号,发光二极管就产生与输入信号变化规律相同的光信号。 光电三级管:在光信号的照射下导通,导通程度与光信号的强弱有关。在光电耦合器的线性工作区内,输出信号与输入信号有线性关系。 输入接口电路工作过程:当开关合上,二极管发光,然后三极管在光的照射下导通,向内部电路输入信号。当开关断开,二极管不发光,三极管不导通。向内部电路输入信号。也就是通过输入接口电路把外部的开关信号转化成PLC内部所能接受的数字信号。 (2)输出接口 PLC的继电器输出接口电路 工作过程:当内部电路输出数字信号1,有电流流过,继电器线圈有电流,然后常开触点闭合,提供负载导通的电流和电压。当内部电路输出数字信号0,则没有电流流过,继电器线圈没有电流,然后常开触点断开,断开负载的电流或电压。也就是通过输出接口电路把内部的数字电路化成一种信号使负载动作或不动作。 三种类型: 继电器输出:有触点、寿命短、频率低、交直流负载 晶体管输出:无触点、寿命长、直流负载 晶闸管输出:无触点、寿命长、交流负载 4.编程器 编程器分为两种,一种是手持编程器,方便。我们实验室使用的就是手持编程器。二种是通过PLC的RS232口。与计算机相连。然后敲击键盘。通过NSTP-GR软件(或WINDOWS 下软件)向PLC内部输入程序。 第二节PLC的基本工作原理
西门子 D系统的组成
西门子840D系统的组成 SINUMERIK840D是由数控及驱动单元(CCU或NCU), MMC,PLC模块三部分组成,由于在集成系统时,总是将 SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。 ●人机界面 人机交换界面负责NC数据的输入和显示,它由MMC和OP组成: MMC(Man Machine Communication) 包括:OP(Operation panel)单元, MMC,MCP(Machine Control Panel)三部分。 MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。 1.MMC 我们最常用的MMC有两种: MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘; 而MMC103的CPU为奔腾, 可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103. PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC 不同的是:PCU50的软件是基于WINDOWS NT的。PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。一般标准供货时,PCU20装载的是嵌入式HMI,而PCU50和PCU70则装载高级HMI. 2.OP OP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031最为常用。 3.MCP MCP是专门为数控机床而配置的,它也是OPI上的一个节点,根据应用场合不同,其布局也不同,目前,有车床版MCP和铣床版MCP两种。对810D和840D,MCP的MPI地址分别为14和6,用MCP后面的S3开关设定。 对于SINUMERIK840D应用了MPI(Multiple Point Interface)总线技术,传输速率为187.5k/秒,OP单元为这个总线构成的网络中的一个节点。为提高人机交互的效率,又有OPI(Operator PanelInterface)总线,它的传输速率为1.5M/秒。 ●数控及驱动单元 1.NCU数控单元 SINUMERIK840D的数控单元被称为NCU(Numenrical Controlunit)单元:中央控制单元,负责NC所有的功能,机床的逻辑控制,还有和MMC的通讯它由一个COM CPU板. 一个PLC CPU 板和一个DRIVE板组成。 根据选用硬件如CPU芯片等和功能配置的不同,NCU分为NCU561.2,NCU571.2,NCU572.2,NCU573.2(12轴),NCU573.2(31轴)等若干种,同样,NCU 单元中也集成SINUMERIK840D数控CPU和SIMATIC PLC CPU芯片,包括相应的数控软件和PLC控制软件,并且带有MPI或Profibus借口,RS232借口,手轮及测量接口,PCMCIA卡插槽等,所不同的是NCU单元很薄,所有的驱动模块均排列在其右侧。 2.数字驱动
plc系统及组成结构
PLC系统组成 PLC系统主要由中央处理器(CPU)、存储器、输入单元、输出单元、通信接口、扩展接口电源等部分组成。其中,CPU是PLC的核心,输入单元与输出单元是连接现场输入/输出设备与CPU之间的接口电路,通信接口用于与编程器、上位计算机等外设连接。 对于整体式PLC,所有部件都装在同一机壳内,其组成框图如图1所示;对于模块式PLC,各部件独立封装成模块,各模块通过总线连接,安装在机架或导轨上,其组成框图如图2所示。无论是哪种结构类型的PLC,都可根据用户需要进行配置与组合。 尽管整体式与模块式PLC的结构不太一样,但各部分的功能作用是相同的,下面对PLC主要组成各部分进行简单介绍。 1.中央处理单元(CPU) 同一般的微机一样,CPU是PLC的核心。PLC中所配置的CPU 随机型不同而不同,常用有三类:通用微处理器(如Z80、8086、80286等)、单片微处理器(如8031、8096等)和位片式微处理器(如AMD29W等) 。小型PLC大多采用8位通用微处理器和单片微处理器;中型PLC大多采用16位通用微处理器或单片微处理器;大型PLC大多采用高速位片式微处理器。 目前,小型PLC为单CPU系统,而中、大型PLC则大多为双CPU系统,甚至有些PLC 中多达8 个CPU。对于双CPU系统,一般一个为字处理器,一般采用8位或16位处理器;另一个为位处理器,采用由各厂家设计制造的专用芯片。字处理器为主处理器,用于执行编程器接口功能,监视内部定时器,监视扫描时间,处理字节指令以及对系统总线和位处理器进行控制等。位处理器为从处理器,主要用于处理位操作指令和实现PLC编程语言向机器语言的转换。位处理器的采用,提高了PLC的速度,使PLC更好地满足实时控制要求。 在PLC中CPU按系统程序赋予的功能,指挥PLC有条不紊地进行工作,归纳起来主要有以下几个方面: 1)接收从编程器输入的用户程序和数据。 2)诊断电源、PLC内部电路的工作故障和编程中的语法错误等。 3)通过输入接口接收现场的状态或数据,并存入输入映象寄有器或数据寄存器中。 4)从存储器逐条读取用户程序,经过解释后执行。 5)根据执行的结果,更新有关标志位的状态和输出映象寄存器的内容,通过输出单元实现输出控制。有些PLC还具有制表打印或数据通信等功能。 2.存储器
PLC系统
PLC系统主要由中央处理器(CPU)、存储器、输入单元、输出单元、通信接口、扩展接口电源等部分组成。其中,CPU是PLC的核心,输入单元与输出单元是连接现场输入/输出设备与CPU之间的接口电路,通信接口用于与编程器、上位计算机等外设连接。 对于整体式PLC,所有部件都装在同一机壳内,其组成框图如图1所示;对于模块式PLC,各部件独立封装成模块,各模块通过总线连接,安装在机架或导轨上,其组成框图如图2所示。无论是哪种结构类型的PLC,都可根据用户需要进行配置与组合。 尽管整体式与模块式PLC的结构不太一样,但各部分的功能作用是相同的,下面对PLC主要组成各部分进行简单介绍。 1.中央处理单元(CPU) 同一般的微机一样,CPU是PLC的核心。PLC中所配置的CPU 随机型不同而不同,常用有三类:通用微处理器(如Z80、8086、80286等)、单片微处理器(如8031、8096等)和位片式微处理器(如AMD29W等) 。小型PLC大多采用8位通用微处理器和单片微处理器;中型PLC大多采用16位通用微处理器或单片微处理器;大型PLC大多采用高速位片式微处理器。 目前,小型PLC为单CPU系统,而中、大型PLC则大多为双CPU系统,甚至有些PLC 中多达8 个CPU。对于双CPU系统,一般一个为字处理器,一般采用8位或16位处理器;另一个为位处理器,采用由各厂家设计制造的专用芯片。字处理器为主处理器,用于执行编程器接口功能,监视内部定时器,监视扫描时间,处理字节指令以及对系统总线和位处理器进行控制等。位处理器为从处理器,主要用于处理位操作指令和实现PLC编程语言向机器语言的转换。位处理器的采用,提高了PLC的速度,使PLC更好地满足实时控制要求。 在PLC中CPU按系统程序赋予的功能,指挥PLC有条不紊地进行工作,归纳起来主要有以下几个方面: 1)接收从编程器输入的用户程序和数据。 2)诊断电源、PLC内部电路的工作故障和编程中的语法错误等。 3)通过输入接口接收现场的状态或数据,并存入输入映象寄有器或数据寄存器中。 4)从存储器逐条读取用户程序,经过解释后执行。 5)根据执行的结果,更新有关标志位的状态和输出映象寄存器的内容,通过输出单元实现输出控制。有些PLC还具有制表打印或数据通信等功能。 2.存储器 存储器主要有两种:一种是可读/写操作的随机存储器RAM,另一种是只读存储器ROM、PROM 、EPROM 和EEPROM。在PLC中,存储器主要用于存放系统程序、用户
常见五种安全PLC 的冗余系统结构和安全性可靠性分析
常用安全PLC 的结构和性能 【摘要】本文介绍了几种常见的安全PLC的结构和性能,然后对各种安全PLC的特性进行了归纳和总结。 【关键词】安全PLC N选X系统三重冗余四重冗余 Abstract: The article analyses several popular safety PLC’s architecture and performance. Finally, summarize their features. Key word: Safety PLC XooN TMR QMR 近几十年来,多起工业事故发生的原因可以追溯到计算机系统的失效,引起了人员伤亡、设备损坏和环境污染。这些信息也唤醒了国家和公众对减少危险、建立安全工业流程的意识。为此,IEC制定了新的安全国际标准:IEC 61508/ 61511,也已经由工业组织合作制定完成,我国的相关标准也即将颁布。 为了帮助读者了解目前安全仪表系统(SIS)使用安全PLC实现电气/电子/可编程电子系统(E/E/PES)功能的情况,就常见的几种安全系统结构进行探讨,希望能对今后的系统选择有所借鉴和参考。 1.PLC 是一个逻辑解算器 一个安全系统的逻辑解算器是一种特殊类型的PLC,它具有独立的安全功能认证,但也有继电器逻辑或者固态逻辑的运算能力。逻辑解算器从传感器读入信号,执行事先编制好的程序或者事先设计好的功能,用于防止或者减轻潜在的安全隐患,然后通过发送信号到执行器或最终元件采取行动。 逻辑解算器的设计有很多种,来满足不同的市场需求、应用和任务。我们下面将就比较典型的安全PLC的结构进行探讨。 2.安全PLC 的体系结构 当你构建一个安全系统时,可以有很多方式来安排安全系统部件。有些安排考虑的是对成功操作有效性的最大化。(可靠性或可用性)。有些安排考虑的是防止特殊失效的发生(失效安全,失效危险)。 控制系统部件的不同安排可以从它们的体系结构中看出来。这节内容将介绍市场上几款常见的可编程电子系统(PES)的体系结构,了解它们的安全特性,以及在安全和关键控制的应用。它们是已经在实践中存在的多种结构的代表,真正现场使用的系统就是这些结构的不同组合。 下面的内容将用N选X (比如2选1) 的方式:XooN 来介绍系统。在每个类型中,X 代表需要执行安全功能的通道数,而N 代表整个可用的通道数。. 2.1.1oo1 单通道系统 单控制器带有单个逻辑解算器和单个I/O 代表了一个最小化的系统,见下图(图1)。这个系统没有提供冗余,也没有失效模式保护。电子电路可以失效安全(输出断电,回路开路)或者失效危险(输出粘连或给电,短路)。这种安排方式是典型的非安全-常规PLC系统结构。
PLC的基本结构和工作原理
第二讲PLC的基本结构和工作原理 教学课题:可编程控制器的基本结构和工作原理 教学目的: 1.熟悉PLC的结构组成、内部等效电路; 2.理解掌握PLC的工作方式和工作过程 教学重点:PLC可编程序控制器的组成和工作过程 教学难点:PLC可编程序控制器的工作过程 教学方法:讲授 教学时间:2课时 教学过程及内容: {导入} 要实现PLC的控制需要: 输入设备、输出设备、PLC硬件和软件(控制程序)。 一、PLC的基本组成 可编程控制器的结构多种多样,但其组成的一般原理基本相同,都是以微处理器为核心的结构,其功能的实现不仅基于硬件的作用,更要靠软件的支持,实际上可编程控制器就是一种新型的工业控制计算机。Memorizer(RAM,ROM), it is the memory devices of the PLC and used to store programs and data. (一)PLC的硬件结构 CPU)——控制器的核心 (RAM、ROM) 输入、输出部件(I/O部件)——连接现场设备与CPU之间的接口电路
电源部件——为PLC内部电路提供能源 整体结构的PLC——四部分装在同一机壳内 模块式结构的PLC——各部件独立封装,称为模块,通过机架和总线连接而成 I/O的能力可按用户的需要进行扩展和组合(扩展机) 另外,还必须有编程器——将用户程序写进规定的存储器内 图1 PLC硬件结构 1.中央控制处理单元(CPU) 可编程控制器中常用的CPU主要采用通用微处理器、单片机和双极型位片式微处理器三种类型。 通用微处理器有8080、8086、80286、80386等;单片机有8031、8096等;位片式微处理器的AM2900、AM2903等。FX2可编程控制器使用的微处理器是16位的8096单片机。 2.存储器 可编程控制器配有两种存储器:系统存储器和用户存储器。 系统存储器:存放系统管理程序,用只读存储器实现。
三菱PLC与PILZ安全PLC以太网端口通信探讨
三菱PLC与PILZ安全PLC以太网端口通信探讨 摘要PILZ安全PLC应用比较广泛,在很多涉及有安全风险的工作工位上都会用PILZ安全PLC的应用。而PILZ的PLC往往只用来做安全程序,而对工作站的主要逻辑控制还是需要主PLC来实现。那么,如何实现主PLC与安全PILZ 的通信,就成了一个重要的问题。常规的解决办法是用总线模块来实现主PLC 与PILZ安全PLC的通信。但这种通信方式成本过高,本文以三菱PLC为例,介绍针对一种通过内置以太网来实现的廉价而又实用的通信方式。 关键词以太网通信;PILZ安全PLC;三菱PLC;端口 实现三菱PLC与PILZ安全PLC以太网端口通信大致需要完成如下步骤:(1)设置PILZ安全PLC的IP地址及端口 (2)设置三菱PLC的IP地址及端口通讯对象参数设置 (3)打开端口 (4)端口发送 (5)端口接收 (6)端口关闭 1 设置PILZ安全PLC的IP地址及端口 在PILZ编程软件PONZmulti Configurator中找到PONZmulti,点击后找到下拉菜单中的Add Ethernet connection,在弹出窗口中的IP address 中设定IP地址為192.168.3.15,在PG Port 中设定参数为2800,SCAN Port 中设定参数为2800,Online timeout 中设定参数为1000。完毕之后点击窗口的OK按钮,则PILZ 安全PLC侧的IP地址与端口设定完成。 2 设置三菱PLC的IP地址及端口通信对象参数设置 在三菱PLC编程软件GX-WORK2中,选择“参数”-“PLC参数”-“内置以太网端口设置”,在IP地址栏写入“192.168.3.39”,子网掩码写入“255.255.255.0”,默认路由器地址写入“192.168.3.1”。点开“打开设置”,在“协议”栏选择“TCP”,“打开方式”选择“SOCKET通信”,“TCP连接方式”选择“ACTIVE”,“本站端号口”设置为“2800”,“通信对象IP地址”输入“192.168.3.15”,“通信对象端口号”写入“2800”,则三菱PLC的IP地址及端口通信对象参数设置完成。 3 打开端口
关于三菱Fx系列PLC编程口通讯协议地址算法
三菱Fx系列PLC编程口通讯协议 一、三菱PLC编程口通讯协议三菱PLC编程口的通讯协议比较简单,只有四个命令,即: 命令命令码目标设备DEVICE READ CMD "0" X,Y,M,S,T,C,D DEVICE WRITE CMD "1" X,Y,M,S,T,C,D FORCE ON CMD " 7" X,Y,M,S,T,C FORCE OFF CMD "8" X,Y,M,S,T,C 五个标示: ENQ 05H 请求 ACK 06H PLC正确响应 NAK 15H PLC错误响应 STX 02H 报文开始 ETX 03H 报文结束 使用累加方式的和校验,帧格式如下: STX CMD DATA ...... DATA ETX SUM(upper) SUM(lower) 和校验: SUM= CMD+……+ETX。如SUM=73H,SUM=“73”。 1、DEVICE READ(读出软设备状态值) 计算机向PLC发送:
始命令首地址位数终和校验 STX CMD GROUP ADDRESS BYTES ETX SUM PLC 返回 STX 1ST DATA 2ND DATA ..... LAST DATA ETX SUM 2、DEVICE WRITE(向PLC 软设备写入值) 计算机向PLC发送: 始命令首地址位数数据终和校验 PLC 返回 ACK (06H) 接受正确 NAK (15H) 接受错误 3、位设备强制置位/复位 FORCE ON 置位 始命令地址终和校验 STX CMD ADDRESS ETX SUM 02h 37h address 03h sum FORCE OFF 复位 始命令地址终和校验 STX CMD ADDRESS ETX SUM 02h 38h address 03h sum PLC 返回 ACK(06H) 接受正确
计算机系统主要由哪两部分组成
1.计算机系统主要由哪两部分组 成?硬件结构主要有哪几大部 分? 答:计算机系统主要由硬件、软件两大部分组成,硬件结构从概念上来说主要由中央处理器(运算器、控制器)、存贮器、输入设备、输出设备等几大部分组成。 2.PLC、DCS的中文全称和英文全 称分别是什么? 答:PLC中文全称:可编程序逻辑控制器,英文全称:ProgrammablepLogicalpController 。DCS中文全称:分散控制系统,英文全称:DistributedpControlpSystem。 3.一体化PLC和模块化PLC各有什 么特点? 答:一体化PLC通常为小型PLC,其I/O点数规模小,I/O、PS、CPU等都集中在一起,适合于单机自动化任务或简单的控制对象。模块化PLC通常为中、大规模PLC,其I/O点数在几百点、几千点甚至上万点,所有I/O 以及PS、CPU、CP等等功能单元均做成独立的模块形式,根据需要以总线形式连接组合在一起,构成一个完整的系统,以实现复杂的自动控制任务。 4.PLC由哪几个部分组成? 答:PLC的基本组成部分有:电源模块、CPU模块、I/O模块、编程器、编程软件工具包等,根据不同类型的系统,一般还会有安装机架(底板)、通讯模板、智能模板、接口模板等5.一般而言,PLC的I/O点数要冗 余10%。 6.PLC设计规范中,RS232通讯的 距离是为15m。 7.PLC的RS485专用通讯模块的通 讯距离500m。 8.PLC采用典型的计算机结构,由中央处理器、存储器、输入输出接口电路和其它一些电路组成。 9.PLC的输入信号模式中,交流输入的电压大多采用AC110V或 AC220V ,直流输入额定电压为 DC24~48V。 10.PLC中CPU的主要作用是什么?答:CPU是PLC的主要部分,是系统的控制中枢,它接收并存储从编程器 键入的用户程序和数据;检查电源、 存储器、I/O以及警戒定时器的状态, 并诊断用户程序的语法错误。 11.PLC在循环扫描周期内,将所需 要输入输出信息存到预先准备 好的一定区域,这个区域称为 I/O镜像区。 12.控制系统的各类模块中,PS、 CPU、CP、AI、AO、DI、DO、IM分别 指的是哪些类型的模块? 答:PS-电源模块,CPU-中央处理 器模块,CP-通讯处理器模块,AI -模拟量输入模块,AO-模拟量输出 模块,DI-数字量输入模块,DO-数 字量输出模块,IM-接口模块。 13.在西门子系统中常用的模块类 型的含义,PS是电源模块,IM 是接口模块,SM是信号模块,FM 是功能模块,CP是通讯模块。 14.在昆腾系统中 CRP是远程I/O 主站接口模块,CRA是远程I/O 从站接口模块,ATI是热电偶输 入模块、ACI模拟量电流输入模 块,ARI是热电阻输入模块、 NOE以太网网络接口模块。 15.SIEMENS S7-300/400之PLC采 用的编程语言主要有哪些? 答:梯形图(LAD),语句表(STL), 逻辑功能图(FD) 16.现有一个16点24VDC的开关量 输入模块,如何用它来输入无源接点 信号和220VAC开关量输入信号? 答:这块模板要输入入220AC开关量 信号,须经过中间继电器转换(中间 继电器线圈供电为220VAC),即 220VAC开关量输入信号检测元件与 中间继电器线圈构成回路,中间继电 器接点以及它的无源干接点可以直 接拉入模板输入点,构成24VDC信号 输入回路。 17.现有一个16点24VDC的开关量 输出模块,如何用它来输入无源接点 信号和220VAC开关量输出信号? 答:这块模板要输出无源接点信号和 220VAC开关量信号,须经过中间继 电器在转换(中间继电器线圈供电为 24VDC),即模板24VDC开关量信号 输出点与中间继电器线圈构成回路, 中间继电器接点或作为干接点信号 提供或与其它220VAC电气元件构成 220VAC信号输出回路 18.描述一个典型的计算机控制系 统的组成。 答:一个典型的计算机控制系统通常 由上位监控系统和下位PLC/DCS控 制系统组成,上位监控系统主要由工 业PC及其相关的软件组成,是一套 完整的计算机系统,下位PLC/DCS控 制系统是一套以PLC/DCS控制器为 核心构成的,通常包含PLC的基本组 成模板、I/O模板及其接口通道设备 元件等。上位监控系统与下位 PLC/DCS控制系统之间通过通讯实现 数据交换,完成对对象的过程监控 19.你所知道的上位监控系统应用 控制程序编程工具软件有哪 些? 答:目前用的比较多的监控系统应用 程序编程工具软件,国外的有WINCC、 FIX、INTOUCH等。国内的有组态王 等。 20.通常仪表提供给PLC/DCS控制 系统的标准信号主要有哪几 种? 答:通常仪表提供给控制系统的标准 主要有:热电偶信号(±50mV)、热 电阻信号(Pt100)、4-20mA信号、 1-5V信号等。 001.UPS的主要功能是什么? 答:稳压;稳频;不间断供电。 002.同步串行和异步串行通讯 有什么不同? 答:同步串行传送方式除需传 送信号外,还需传送用于位指示的时 针同步信号。而异步方式不需要,但 需事 先规定,双方采用相同的 数据格式及波特率。 003.计算机运行环境的主要指 标是什么? 答:电源:220V±5%或110V ±10% 温度:15-35℃湿度: 30%-80% 004.工控机的接地要求是什 么? 答:对于工控机系统,整个系 统必须有良好的接地,接地电阻应小 于4欧,接地导线宜崐采用截面大于 1.5
以太网网络如何在三菱PLC内实现
以太网网络 4.1以太网基础概念 Ethernet 网是 1973 年美国 X erox 公司 P alo Alto 研究所最先开始研究的,此后经ANSI/IEEE 标准规格,ISO 国际标准认可的网络技术规格。 Ethernet 是LAN(Local Area Network)规格的一种,是企业信息系统中系统管理者对生产现场进行远程生产管理、远程在库/资料管理时处理各种数据的开放式网络。 1. IP 地址 IP 地址(Internet Protocol Address)是为了区分连接在英特网、内网等网络中的各台设备、计算机等而分配给它们的识别号码,相当于寄信时的地址和打电话时的电话号码。 世界规模的因特网中存在的网络都使用国际统一的地址。(由各国分别管理,比方说日本,由JPNIC 管理) 现在普及的IPV4用32位的数值表示上述的IP 地址。一般来说,表示为象 192.168.1.1 一样由4个8位的10进制数组成。32位的值分为识别各网络的网络部分和识别网络中的各个连接设备(例如计算机)的本机部分。 比如:下面设备构成以太网通信的IP 地址分配 2. 端口号: 实际的通信是在设备、计算机中运行的应用程序之间进行的。 TCP *1和UDP *1 通过端口号(port number)来识别哪一个应用程序与哪一个应用程序在进行着通信。 比如:如果认为IP 地址是一栋大楼的地址的话,端口号就相当于大楼的“某一层”。 端口号的范围包括0~65535(0~FFFF),其中0~1023(0~3FF)的端口号一般叫做公认端口号(Well Known Port Numbers),与各个应用程序固定绑定。 Q-Ethernet 模块中,本地端口号可以在1025~4999,5003~65534 (401~1387H,138B~FFFEH)之间任意设定。 发送数据 192.168.1.1 接收数据 192.168.1.2 192.168.1.3 192.168.1.4
KEPWRAE与三菱Q系列PLC以太网通讯配置
KEPWRAE与三菱Q系列PLC以太网通讯配置 一:通讯基本条件 1、KEPWARE OPC server 及其套件(含三菱以太网驱动)、三菱编程软件GX Developer; 2、三菱以太网模块; 3、OPC服务器及三菱以太网模块处于同一以太网网段 以下以PLC网卡地址为10.37.2.60、OPC服务器地址为10.37.2.73为例,图示说明其设置 方法。 二:PLC侧设置 打开三菱编程软件GX Develper ,在“网络参数”页面组态PLC与OPC 服务器的连接。步骤如下: 1、打开“网络参数”/以太网,设置:网络类型=以太网;起始I/O号=00C0(按以太网模块所在位置分配);网络号=1;站号=60(1~63中任选);在线模式等。见图 2、打开“操作设置”界面,设置:通讯数据格式=2 进制码(必须2 进制);初始时间设置=始终等待打开;IP地址=10.37.2.60;运行中允许写入必须勾选。见图 3、打开“打开设置”,新建连接:协议选择UDP;固定缓冲区寄存器选“接受”,后面依次为有顺序、单个、不确认;本地端口号=1388[此处为16 进制,只要与kepwere 里设备属性里端口号(十进制)一致就行];通讯目标地址:10.37.2.73(opc 服务器地址);目标端口号=FFFF(自适应端口设置)见图
4、设置完后下载至PLC(串口或以太网方式下载,如以太网方式下载,电脑IP 地址与改前PLC 网卡IP地址在同一网段),重启PLC,使设置生效 三、KEPWARE侧设置 1、打开kepware server,新建通道,选择三菱以太网驱动,其他默认,如图 2、在通道下新建设备,设置name;mode= Q Series;ID=10.37.2.60:N0:255(IP:net work:pc number);IP protocol=UDP;Port number=5000(此为10 进制,16 进制为1388)。其中,ID中的网络号无论PLC网络参数中的网络号为1还是0,此处均为0,否则通讯不上。PC 号本地计算机为255,其他默认。见下图
三菱plc通信及其网络技术
PLC通讯及网络技术 1.PLC与计算机通讯 为了适应PLC网络化要求,扩大联网功能,几乎所有的PLC为了适应可编程控制器网络化的要求,扩大联网功能,几乎所有的可编程控制器厂家,都为可编程控制器开发了与上位机通讯的接口或专用通讯模块。一般在小型可编程控制器上都设有 RS422 通讯接口或 RS232C 通讯接口;在中大型可编程控制器上都设有专用的通讯模块。如:三菱 F 、 F1 、 F2 系列都设有标准的 RS422 接口,FX 系列设有 FX-232AW 接口、 RS232C 用通讯适配器 FX-232ADP 等。可编程控制器与计算机之间的通讯正是通过可编程控制器上的 RS422 或 RS232C 接口和计算机上的 RS232C 接口进行的。可编程控制器与计算机之间的信息交换方式,一般采用字符串、双工或半、异步、串行通信方式。因此可以这样说,凡具有RS232C 口并能输入输出字符串的计算机都可以用于和可编程控制器的通讯。 运用 RS232C 和 RS422 通道,可容易配置一个与外部计算机进行通讯的系统。该系统中可编程控制器接受控制系统中的各种控制信息,分析处理后转化为可编程控制器中软元件的状态和数据;可编程控制器又将所有软元件的数据和状态送入计算机,由计算机采集这些数据,进行分析及运行状态监测,用计算机可改变可编程控制器的初始值和设定值,从而实现计算机对可编程控制器的直接控制。 (1)通讯方式-ˉ (2)面对众多生产厂家的各种类型PLC,它们各有优缺点,能够满足用户的各种需求,但在形态、组成、功能、编程等方面各不相同,没有一个统一的标准,各厂家制订的通信协议也千差万别。目前,人们主要采用以下三种方式实现PLC与PC的互联通信: 1)通过使用PLC开发商提供的系统协议和网络适配器,来实现PLC 与PC机的互联通信。但是由于其通信协议是不公开的,因此互联通信必 须使用PLC开发商提供的上位机组态软件,并采用支持相应协议的外设。 可以说这种方式是PLC开发商为自己的产品量身定作的,因此难以满足不 同用户的需求。 2)使用目前通用的上位机组态软件,如组态王、InTouch、WinCC、 力控等,来实现PLC与PC机的互连通信。组态软件以其功能强大、界面友 好、开发简洁等优点目前在PC监控领域已经得到了广泛的应用,但是一 般价格比较昂贵。组态软件本身并不具备直接访问PLC寄存器或其它智能 仪表的能力,必须借助I/O驱动程序来实现。也就是说,I/O驱动程序是组 态软件与PLC或其它智能仪表等设备交互信息的桥梁,负责从设备采集实 时数据并将操作命令下达给设备,它的可靠性将直接影响组态软件的性 能。但是在大多数情况下,I/O驱动程序是与设备相关的,即针对某种PLC 的驱动程序不能驱动其它种类的PLC,因此组态软件的灵活性也受到了一
三菱QPLC之间以太网通信
三菱QJ71E71-100实现QPLC之间的通信说明 三菱电机自动化(上海)有限公司张谷似 实验对象: Q PLC1:Q61P+Q33B+Q02HCPU+QJ71E71-100 Q PLC2:Q61P+Q33B+Q02HCPU+QJ71E71-100 系统构成: 每组Qplc上安装一块以太网模块,分别与现场的HUB相连,PLC1可以通过以太网实现对 PLC2的数据读写。 PLC1 PLC2 连接方式: 普通网线、RJ45接头 GX Developer中的设置: PLC1的参数设置 在“parameter”>>“net work parameter”中,点击“Ethernet/CcIE/MELSECNETH”按钮并 设置如图所示: “operational setting”设置
“station no<>ip information”设置 PLC2的设置: 基本同PLC1的设置,站号、IP地址相应修改。 程序说明: <1>专用指令说明READ指令 专用指令适用的软件元件 专用指令设定数据
专用指令控制数据说明 <2>程序的编写 程序的说明,PLC1与PLC2在以太网相连的情况下,PLC2通过以太网模块的通道3去实现对PLC1的数据读取。 SM410连续读取1号网络1号站的D0~D4(5个数据)到本地站的D200~204
时钟数据确认 本地站使用通道号 目标网络编号 目标站站号 重试次数 到达监视时间 读取数据长度 读取1号网络1号站D0~4到本地站的D200~204 初始化正常完成 错误读出 错误复位 将本地站D300~304写入1号网络1号站D400~404