US1G D

US1A – US1K
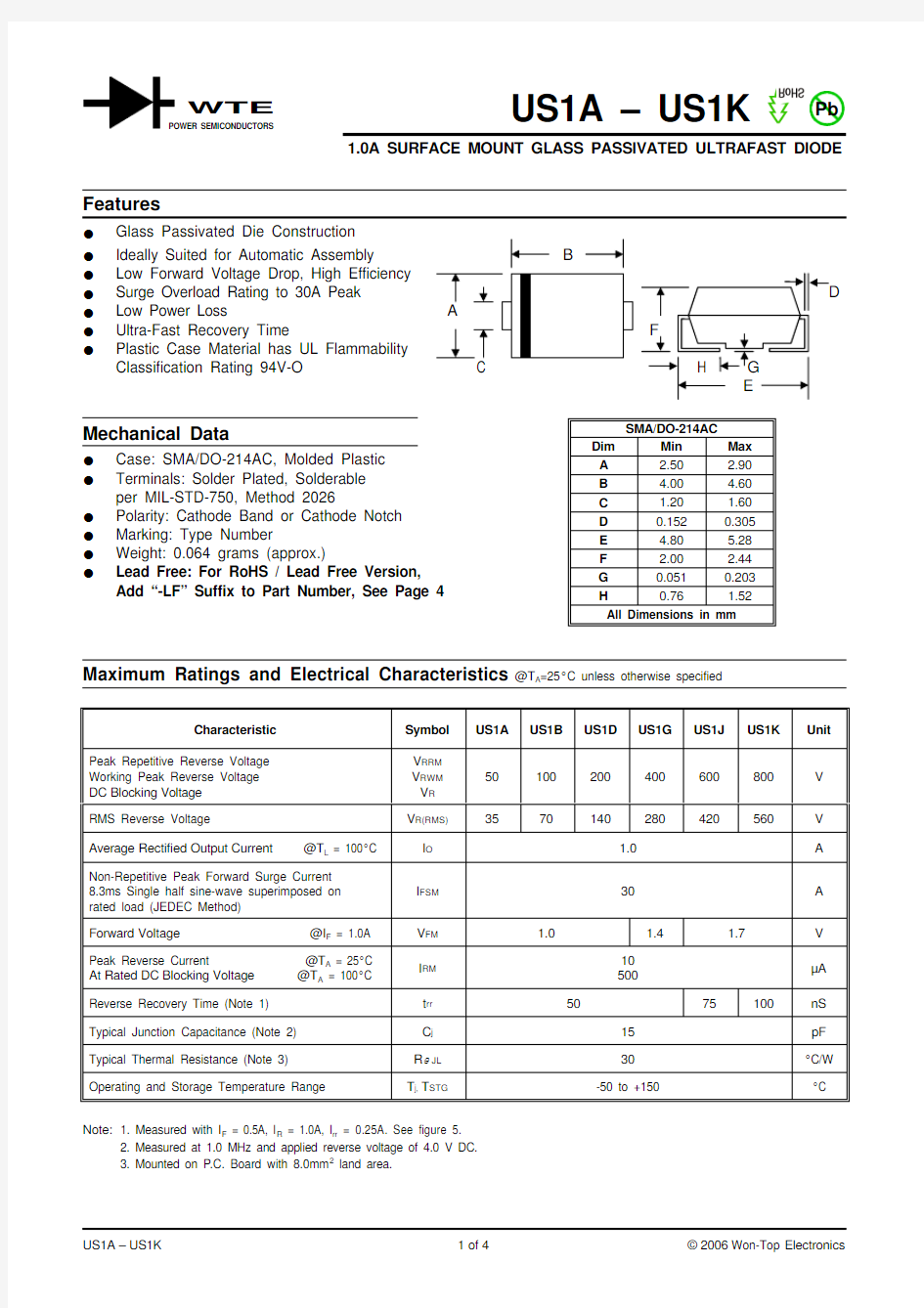
1.0A SURFACE MOUNT GLASS PASSIVATED ULTRAFAST DIODE
Characteristic
Symbol US1A
US1B
US1D
US1G
US1J
US1K
Unit
Peak Repetitive Reverse Voltage Working Peak Reverse Voltage DC Blocking Voltage V RRM
V RWM V R 50100200400600800V RMS Reverse Voltage
V R(RMS)
35
70
140
280
420
560
V Average Rectified Output Current @T L = 100°C I O 1.0A Non-Repetitive Peak Forward Surge Current 8.3ms Single half sine-wave superimposed on rated load (JEDEC Method)
I FSM 30
A
Forward Voltage @I F = 1.0A V FM 1.0
1.4 1.7V Peak Reverse Current @T A = 25°C At Rated DC Blocking Voltage @T A = 100°C I RM 10500
μA Reverse Recovery Time (Note 1)t rr 50
75
100
nS Typical Junction Capacitance (Note 2)C j 15pF Typical Thermal Resistance (Note 3)R JL 30°C/W Operating and Storage Temperature Range
T j, T STG
-50 to +150
°C
Note: 1. Measured with I F = 0.5A, I R = 1.0A, I rr = 0.25A. See figure 5.
2. Measured at 1.0 MHz and applied reverse voltage of 4.0 V DC.
3. Mounted on P .C. Board with 8.0mm 2 land area.
WTE
Set time base for 10ns/cm
+0.5A
0A -0.25A
-1.0A
Notes:
1.Rise Time =7.0ns max.Input Impedance =1.0M ,22pF.
2.Rise Time =10ns max.Input Impedance =50.
??Fig.5Reverse Recovery Time Characteristic and Test Circuit
0.01
0.1
1.0
10
100
1000
20
40
60
80
100
120
140
I ,I N S T A N T A N E O U S R E V E R S E C U R R E N T (m A )
R PERCENT OF RATED PEAK REVERSE VOLTAGE (%)
Fig.4Typical Reverse Characteristics
0.01
0.1
1.0
10
0.4
0.8
I ,I N S T A N T A N E O U S F O R W A R D C U R R E N T (A )
F V ,INSTANTANEOUS FORWARD VOLTAGE (V)
Fig.2Typical Forward Characteristics
F
1.2
1.6
2.0
010
20
30
40
1
10
100
I ,P E A K F O R W A R D S U R G E C U R R E N T (A )
F S M NUMBER OF CYCLES
AT 60Hz
Fig.3Forward Surge Current Derating Curve
00.5
1.0
25
50
75
100
125
150
I A V E R A G E F O R W A R D C U R R E N T (A )
(
A V ),T ,L E AD T EMPERATURE ( C)Fig.1Forward Current Derating Curve
L °
MARKING INFORMATION RECOMMENDED FOOTPRINT
PACKAGING INFORMATION
ORDERING INFORMATION
Product No.
Package Type
Shipping Quantity
US1A-T3SMA 7500/Tape & Reel US1B-T3SMA 7500/Tape & Reel US1D-T3SMA 7500/Tape & Reel US1G-T3SMA 7500/Tape & Reel US1J-T3SMA 7500/Tape & Reel US1K-T3
SMA
7500/Tape & Reel
1. Shipping quantity given is for minimum packing quantity only. For minimum
order quantity, please consult the Sales Department.
2.
To order RoHS / Lead Free version (with Lead Free finish), add “-LF” suffix to part number above. For example, US1A-T3-LF .
Won-Top Electronics Co., Ltd (WTE) has checked all information carefully and believes it to be correct and accurate. However, WTE cannot assume any responsibility for inaccuracies. Furthermore, this information does not give the purchaser of semiconductor devices any license under patent rights to manufacturer. WTE reserves the right to change any or all information herein without further notice.
WARNING : DO NOT USE IN LIFE SUPPORT EQUIPMENT. WTE power semiconductor products are not authorized for use as critical components in life support devices or systems without the express written approval.
We power your everyday.
Won-Top Electronics Co., Ltd.
No. 44 Yu Kang North 3rd Road, Chine Chen Dist., Kaohsiung, Taiwan Phone: 886-7-822-5408 or 886-7-822-5410Fax: 886-7-822-5417
Email: sales@https://www.wendangku.net/doc/1211291130.html,
Internet: https://www.wendangku.net/doc/1211291130.html,
D图像生成算法原理
D图像生成算法原理 Standardization of sany group #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
3D图像生成算法原理 一、建齐次坐标 二、着色模型 三、Z缓存 四、纹理映射 在这些步骤中,显示部分(GPU)只负责完成第三、四步,而前两个步骤主要是依靠 CPU 来完成。而且,这还仅仅只是3D图象的生成,还没有包括游戏中复杂的AI运算。 场景切换运算等等……无疑,这些元素还需要CPU去完成,这就是为什么在运行大型3D的时候,当场景切换时再强劲的显卡都会出现停顿的现象。 3D芯片的处理对象是多边形表示的物体。用多边形表示物体有两个优点:首先是直接(尽管繁琐), 多边形表示的物体其表面的分段线性特征除轮廓外可以通过明暗处理(shading)技术消除;其次是仅存储多边形顶点的几何信息, 多边形内部每个象素的明暗颜色计算所需的信息由这些顶点信息插值而来,这正是易于用图形硬件支持的快速明暗处理技术。 支持多边形绘制的图形硬件同样也可以绘制由双三次曲面片表示的物体,通过对这种物体的表面进行三角剖分, 用逼近的三角形网格代替原物体的曲面表示就可以做到这一点。
当然,用多边形表示物体也有其缺点,如增加了纹理映射和阴影生成的难度,当需要详细表示复杂物体时所需的三角形数量将变得非常庞大。 将多边形表示的物体显示到计算机屏幕上,这一过程涉及物体在计算机内部的表示方式即物体的数据结构, 由物体组成的场景的组织结构,物体从场景到屏幕空间要经过的一系列变换,以及产生最终屏幕图象要经过的一系列光栅化处理。 这些方面都涉及到特定的处理算法,相应的算法又有许多不同的变种。 下面仅就3D芯片涉及的图形处理过程及相关算法做一简单分析介绍,这些是理解3D图形处理及图形硬件的基础。 一、3D物体的表示法 具有复杂外形的物体其表面可以由多边形面片来近似表示。以图1的圆柱为例,其柱面可以由2N个三角形近似,其两端可以由两个N边形来近似。 多边形模型在其轮廓上的分段线性特征是这一表示法主要的视觉缺陷,改进的唯一途径是增加多边形的分辨率。 对于一个复杂形体来说,为了充分表示其细节,常常要用到十万个以上的多边形。这将耗费许多数据库访问时间和绘制时间。 当将多边形模型进行放大处理时,会产生连接问题。这就是所谓的“几何走样”。
利用计算机语言编程实现D算法
Harbin Institute of Technology 通信网理论与技术报告 题目:利用计算机语言编程实现D算法 院(系)电子与信息工程学院 班级通信1班 学生 学号 哈尔滨工业大学
利用计算机语言编程实现D算法 1 D算法简介 Dijkstra(狄克斯特拉)算法用于计算通信网中指定节点到其他各节点的最短路径,简称D算法。本实验课程主要目的利用计算机语言编程实现D算法。 D算法是通过对路径的长度进行迭代,从而计算出到达目的节点的最短路径。其基本思想为:按照路径长度增加的顺序来寻找最短路径。 步骤:假定节点begin为源节点,则 (1)初始化:置N={begin},对不属于N的结点v,置D(v)=w(begin,v)。 (2)迭代: ①寻找下一个与节点begin最近的节点u,加入到N中。如果N中包括了所有的节点,则算法结束。 ②对所有不属于N的结点v按下式更新 D(v):D(v)=min[D(v),D(u)+weight(u,v)] 2编程环境及输入输出参数 本实验使用Matlab软件,Matlab具有强大的数据处理能力和完备的图形处理功能。 学生利用Matlab编写了D算法的函数,函数名为dijkstra.m。本函数包含3个输入参数:结点个数n,节点间路径长度矩阵weight,给定节点begin;两个输出参数:给定节点到其它各节点的最短路径矩阵path_matrix、径长min。 3例题的运算结果 本实验中的例题为: 无向图共有7 个节点,如下图所示。 图1 7节点无向图 若v1为指定节点,计算机编程实现v1到其它各节点的最短路径及径长。 文件dijkstra_test1.m即为利用D算法实现上述要求的源程序,程序调用D 算法函数dijkstra.m。输入的权值矩阵如图2。 节点1到各节点的最短路径矩阵形式输出如图3,该矩阵中第i行即表示节点1到节点i的路径,矩阵中的0没有意义,可略去不看。节点1到各节点的最短路径径长如图4所示,其中第j列表示节点1到节点j的最短路径径长。 需要注意的是,图3中给出的节点1到节点5路径(1,3,5)与老师给的文档中路径(1,4,5)不相同,这是因为他们的路径径长均为7,都是最短路径,按照学生的编程顺序,程序选择了(1,3,5),节点1到节点7路径也是类似的情况。
D计算方法汇总
D计算方法汇总 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
用本期试机号的跨度.杀本期跨度,和下期跨度,很准的, 例如,2010177期,试机号,[599],177期杀[4]跨度; 同样178期也杀跨度[4] 178期出号为[176],试机号[580] 本期和下期都杀[8]跨 有效率百分90以上 [技巧1]一胆中3D的方法 一胆中3D:(45个组合) 01 02 03 04 05 06 07 08 09 12 13 14 15 16 17 18 19 23 24 25 26 27 28 29 34 35 36 37 38 39 45 46 47 48 49 56 57 58 59 67 68 69 78 79 89 只要你选择的1个胆码中开奖号码其中之一,则用胆码全拖以上45个组合,一定中组选6(但不含豹子,如111,222);还可以通过排除奇偶,大小等减少投注组合;如判断出组3则不用全拖,只要包下含胆码的组合买组3。 例如:220期:开158,如用5做胆,排除组3,余36注组选6。
全拖:组合有 015 025 035 045 056 057 057 059 125 135 145 165 157 158 159 235 245 256 257 258 259 345 356 357 358 359 456 457 458 459 567 568 569 578 579 589 221期:开989,如用9做胆,全拖中989 如判断出组3,全包9的组合投组3: (09,19,29,39,49,59,69,79,89)*6=54注中直选989 [技巧2]2002-2006未出号码,请参考.(2006023期已更新) 粉红色代表最近刚出,从2002001期到2006023期截止,从未出现过的单选号码: 007 010 017 020 027 029 030 036 046 049 051 055 056 057 061 065 089 095 097 111 113 117 119 120 122 124 136 137 145 147 148 181 183 186 188 192 193 194 199 210 216 221 230 231 234 236 241 246 252 254 255 256 267 268 274 278 281 292 293 294 296 308 309 316 317 320 326 329 330 337 342 343 356 362 365 371 372 373 376 377 379 382 384 385 388 394 398 402 403 406 407 410 411 412 420 421 423 429 431 440 442 447 449 450 451 454 462 469 470 480 486 497
D算法求最短路径
题目:设计一个运用改进的D算法进行物流系统路径优化的仿真程序,要求可随机或由用户操控产生物流网络示意图,并给出仿真结果。 引言 最短路径问题是图论中的一个重要问题,在交通运输、物流配送、网络分析等方面都有着广泛的应用,求解最短 路径的方法也有很多,诸如动态规划法、启发式算法、迭 代法等,本文就最经典的Dijkstra算法给出C语言程序并进 行分析,提出一种改进的算法,并对改进算法进行算法分析。 一.传统的Dijkstra算法 Dijkstra算法是典型的算法。Dijkstra算法是很有代表性的算法。 Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表的方式,这里均采用永久和临时标号的方式。注意该算法要求 图中不存在负权边。 首先,引进一个辅助向量D,它的每个分量D[i]表示当前所找到的从始点 v到每个终点vi的的长度:如D[3]=2表示从始点v到终点3的路径相对最小 长度为2。这里强调相对就是说在算法过程中D的值是在不断逼近最终结果但 在过程中不一定就等于长度。它的初始状态为:若从v到vi有弧,则D为弧上 的权值;否则置D为∞。显然,长度为D[j]=Min{D | vi∈V} 的路径就是从v 出发的长度最短的一条。此路径为(v,vj)。那么,下一条长度次短的是哪一条呢?假设该次短路径的终点是vk,则可想而知,这条路径或者是(v,vk),或者 是(v,vj,vk)。它的长度或者是从v到vk的弧上的权值,或者是D[j]和从vj 到vk的弧上的权值之和。一般情况下,假设S为已求得的终点的集合,则可 证明:下一条最短路径(设其终点为X)或者是弧(v,x),或者是中间只经过S 中的顶点而最后到达顶点X的路径。因此,下一条长度次短的的长度必是 D[j]=Min{D | vi∈V-S} 其中,D或者是弧(v,vi)上的权值,或者是 D[k](vk∈S)和弧(vk,vi)上的权值之和。算法描述如下: 1)arcs表示弧上的
D算法
最短路径 -------------------------------------------------------------------------------- 从某源点到其余顶点之间的最短路径 设有向网G=(V,E),以某指定顶点为源点v0,求从v0出发到图中所有其余各项点的最短路径。以图5-5-1所示的有向网络为例, 若指定v0为源点,通过分析可以得到从v0出发到其余各项点的最短路径和路径长度为: v0 → v1 :无路径 v0 → v2 :10 v0 → v3 :50 (经v4) v0 → v4 :30 v0 → v5 :60 (经v4、v3) 图5-5-1 带权有向图 如何在计算机中求得从v0到其余各项点的最短路径呢?迪杰斯特拉(Dijkstra)于1959年提出了一个按路径长度递增的次序产生最短路径的算法。其基本思想是:把图中所有顶点分成两组,第一组包括已确定最短路径的顶点(初始只包括顶点v0),第二组包括尚未确定最短路径的顶点,然后按最短路径长度递增的次序逐个把第二组的顶点加到第一组中去,直至从v0出发可以到达的所有顶点都包括到第一组中。在这过程中,总保持从v0到第一组各顶点的最短路程长度都不大于从v0到第二组的任何顶点的最短路径长度。另外,每一个顶点对应一个距离值,第一组的顶点对应的距离值就是从v0到此顶点的只包括第一组的顶点为中间顶点的最短路径长度。 设有向图G有n个顶点(v0为源点),其存储结构用邻接矩阵表示。算法实现时需要设置三个数组s[n]、dist[n]和path[n]。s用以标记那些已经找到最短路径的顶点,若s[i]=1,则表示已经找到源点到顶点vi的最短路径,若s[i]=0,则表示从源点到顶点vi的最短路径尚未求得,数组的初态只包括顶点v0,即s[0]=1。数组dist记录源点到其他各顶点当前的最短距离,其初值为: dist[i]=G.arcs[0][i] i=1,2,…,n-1 path是最短路径的路径数组,其中path[i]表示从源点v0到顶点vi之间的最短路径上该顶
D算法
姓名:商晴庆班级:学号:班内序号: 实验三 Dijkstra算法的matlab实现 一、程序及注释 function y=dijkstra(x) disp('************【D算法】以第五章课后习题5.10为例******************'); stop=1; while(stop) disp('给定的测试初始距离矩阵为:'); w1=[0.0 9.2 1.1 3.5 100 100 1.3 0.0 4.7 100 7.2 100 2.5 100 0.0 100 1.8 100 100 100 5.3 2.4 0.0 7.5 100 6.4 2.2 8.9 0.0 5.1 7.7 100 2.7 100 2.1 0.0] w=input('您可以直接输入“w1”选择给定的测试矩阵,或者任意输入一个邻接权值矩阵进行测试w=: '); [n,n]=size(w); tic; %初始化回溯路由 for i=1:n for j=1:n if w(i,j)~=100&&w(i,j)~=0 parent(i,j)=i; %初始化回溯路由矩阵 else parent(i,j)=0; end end end D=w;%初始距离矩阵 for st=1:n visit=ones(1,n);visit(st)=0;%把节点分为两个集合,已选节点标注为0,未选节点标注为1 %path=[]; %从起点出发,找最短距离的下一个点,每次不会重复原来的轨迹,设置visit判断节点是否已经加入 for i=1:n-1 temp=[];
for j=1:n if visit(j) temp=[temp D(st,j)]; else temp=[temp 100]; end end [value,index]=min(temp);%value是temp中最小值,index是最小值的序号 visit(index)=0;%把最小值加入到已选节点集合 %更新。如果经过index节点,从起点到每个节点的路径长度更小,则更新,记录前趋节点,方便后面回溯循迹 for k=1:n if D(st,k)>D(st,index)+w(index,k) D(st,k)=D(st,index)+w(index,k); parent(st,k)=index; end end end end t=toc; disp('所得距离矩阵为:'); disp(D); disp('所得回溯路由矩阵为:'); disp(parent); disp(['算法运行时间为:',num2str(t)]); disp('************************************************************** **'); disp('*************计算任意端点间最短距离和路由 *************************'); wc=D; i=input('请输入起点: '); while (i<1 || i>n) disp('!起点不存在,请输入正确起点'); i=input('请输入起点: '); end j=input('请输入终点: '); while (j<1 || j>n ) disp('!终点不存在,请输入正确终点'); j=input('请输入终点: '); end if wc(i,j)==100
通信网实验报告-实现D算法
实验一:利用计算机语言编程实现D 算法 一:实验目的 本实验课程主要目的是通过编程能够熟练掌握图论中的D 算法。 二:实验方法 选择MATLAB 语言编程实现D 算法。 三:实验要求 1. 输入必要参数,包括:节点个数、节点间路径长度、给定节点; 2. 输出给定节点到其它各节点的最短路径、径长; 3. 节点间路径长度用矩阵形式表示。 四:实验原理 1. D 算法原理 已知图G=(V,E),将其节点集分为两组:置定节点集p G 和未置定节点集 p G G -。其中p G 内的所有置定节点,是指定点s v 到这些节点的路径为最短(即 已完成最短路径的计算)的节点。而p G G -内的节点是未置定节点,即s v 到未置定节点距离是暂时的,随着算法的下一步将进行不断调整,使其成为最短径。在调整各未置定节点的最短径时,是将p G 中的节点作为转接点。具体地说,就是将p G 中的节点作为转接点,计算(s v ,j v )的径长(j p v G G ∈-),若该次计算的径长小于上次的值,则更新径长,否则,径长不变。计算后取其中径长最短者,之后将j v 划归到p G 中。当(p G G -)最终成为空集,同时p G G =,即求得s v 到所有其他节点的最短路径。 j w 表示s v 与其他节点的距离。 在p G 中,i w 表示上一次划分到p G 中的节点i v 到s v 得最短路径。在 p G G -中,表示s v 到j v (j p v G G ∈-)仅经过p G 中的节点作为转接点所求得的该次的最短路径的长度。 如果s v 与j v 不直接相连,且无置定节点作为转接点,则令j w =∞。 2. D 算法实现流程 D 算法流程如下图所示。
Dstar算法
D*算法 D*是动态A*(D-Star,Dynamic A*)卡内及梅隆机器人中心的Stentz在1994和1995年两篇文章提出,主要用于机器人探路。是火星探测器采用的寻路算法。 主要方法: 1.先用Dijstra算法从目标节点G向起始节点搜索。储存路网中目标点到各个节点的最短路和该位置到目标点的实际值h,k(k为所有变化h之中最小的值,当前为k=h。每个节点包含上一节点到目标点的最短路信息1(2),2(5),5(4),4(7)。则1到4的最短路为1-2-5-4。 原OPEN和CLOSE中节点信息保存。 2.机器人沿最短路开始移动,在移动的下一节点没有变化时,无需计算,利用上一步Dijstra计算出的最短路信息从出发点向后追述即可,当在Y点探测到下一节点X状态发生改变,如堵塞。机器人首先调整自己在当前位置Y到目标点G的实际值h(Y),h(Y)=X到Y的新权值c(X,Y)+X的原实际值h(X).X为下一节点(到目标点方向Y->X->G),Y是当前点。k值取h 值变化前后的最小。 3.用A*或其它算法计算,这里假设用A*算法,遍历Y的子节点,点放入CLOSE,调整Y的子节点a的h值,h(a)=h(Y)+Y到子节点a的权重C(Y,a),比较a点是否存在于OPEN和CLOSE 中,方法如下: while() { 从OPEN表中取k值最小的节点Y; 遍历Y的子节点a,计算a的h值h(a)=h(Y)+Y到子节点a的权重C(Y,a) { if(a in OPEN) 比较两个a的h值 if( a的h值小于OPEN表a的h值) {更新OPEN表中a的h值;k值取最小的h值 有未受影响的最短路经存在 break; } if(a in CLOSE) 比较两个a的h值//注意是同一个节点的两个不同路径的估价值 if( a的h值小于CLOSE表的h值) { 更新CLOSE表中a的h值; k值取最小的h值;将a节点放入OPEN表 有未受影响的最短路经存在 break; } if(a not in both) 将a插入OPEN表中;//还没有排序 } 放Y到CLOSE表; OPEN表比较k值大小进行排序; } 机器人利用第一步Dijstra计算出的最短路信息从a点到目标点的最短路经进行。 D*算法在动态环境中寻路非常有效,向目标点移动中,只检查最短路径上下一节点或临近节点的变化情况,如机器人寻路等情况。对于距离远的最短路径上发生的变化,则感觉不太适用。
L S D 算 法
opencv图像处理学习(三十二)——LSD快速直线检测 LSD快速直线算法用于局部提取直线,时间复杂度低。LSD算法通过对图像局部分析,得出直线的像素点集,在通过假设参数进行验证求解,将像素点集合与误差控制集合合并,进而自适应控制误检的数量。检测图像中的直线最基本的思想就是检测图像中梯度变化较大的像素点集,LSD正是充分利用了梯度信息和行列线来进行直线检测的。 (1)行列线及支撑线。行列线是图像的灰度从黑到白或从白到黑剧烈变化的分割线,即梯度形成区域。首先计算梯度图像中每个像素点行列线角度以生产行列线区域,对于单位向量域而言,该区域被分为若干子区域,所有向量与基准点行列线相切,连接区域包含同样或相似的容忍误差为的角度。通过这样的运算可以确保它并不需要同样强度的梯度行列线,最后得到的效果是,即使有锯齿线、混叠效应,同样可以使局部水平线的方向大致是平行的。 每个支撑线区域都是以候选的直线分割方式对应支撑线区域最小外接矩形,同时满足相应的几何目标与其一一对应,几何形状矩形的主方向作为支撑线的主轴方向,矩形区域覆盖整个区域 (2)对齐点。在每个支撑线区域形成的矩形区域内,若该像素点形成的行列线方向角度与矩形主轴方向在容忍误差范围内保存一致性,则矩形区域内的像素个数n及对齐点个数k都需要计算出来,然后通过相应准则来验证该矩形分割是否可作为正确的直线分割。 LSD算法并不重复计算单个行列线,为了避免出现这样的情况,行列线
将会被基于其梯度大小进行排序,梯度变化方向最大的为最重要的行列线,该行列支撑线的获取将会根据其强梯度降序排列来得到。该算法的优点是可以根据几个参数的设置来提升不同应用场景下的检测性能,线性时间内就可以完成,但算法本身也存在局部算法的缺点。 (1)图像缩放。将输入图像缩小到原图像的80%,减弱或消除图像中的锯齿效应,利用高斯下采样的方式对输入图像进行操作。图像首先与高斯核卷积来平滑消除锯齿效应,然后进行降采样操作,防止其他干扰噪声。 (2)计算梯度。图像的梯度计算是通过2x2模板完成的,较小模板也使得计算相对较快,同时也保证了邻域方向分布的先对独立性。对于灰度图像f(i,j),图像的梯度由下式可得: 图像梯度的幅度G及行列线的角度可由下式得到: (3)梯度排序。梯度值剧烈变化的像素区域一般是图像中较强边缘存在的区域,LSD算法中区域像素点的处理将会直接影响后续的梯度检测,中间像素一般具有最高的梯度幅度,需要将像素点梯度值进行从大到小的排序,中间像素一般具有最高的梯度幅值,需要将像素点梯度幅值进行从大到小的排序,进而可以完成直线检测。LSD中实现的排序算法是伪排序算法,可在线性时间内完成,等间距均匀设置种子点,像素按照对应幅值归类到种子区域,然后利用像素映射关系对梯度幅值进行排序。 (5)区域生成。在排序像素列表中选取状态为未使用的像素点作为种子点,搜索角度满足状态为未使用的点8邻域形成的区域生成支撑线区域。邻域内的角度误差范围,像素将依次被添加到该区域内进行验证更新,种子点的行列线角度为,区域的角度更新为,其中为行列线区域角度。根据实