光学系统像差理论综合实验.doc

第五节光学系统像差实验
一、引言
如果成像系统是理想光学系统 , 则同一物点发出的所有光线通过系统以后 , 应该聚焦在理想像面上的同一点 , 且高度同理想像高一致。但实际光学系统成像不可能完全符合理想 , 物点光线通过光学系统后在像空间形成具有复杂几何结构的像散光束 , 该像散光束的位置和结构通常用几何像差来描述。
二、实验目的
掌握各种几何像差产生的条件及其基本规律,观察各种像差现象。
三、基本原理
光学系统所成实际像与理想像的差异称为像差,只有在近轴区且以单色光所
成像之像才是完善的(此时视场趋近于 0,孔径趋近于 0)。但实际的光学系统均需对有一定大小的物体以一定的宽光束进行成像,故此时的像已不具备理想成像的条件及特性,即像并不完善。可见,像差是由球面本身的特性所决定的,即使透镜的折射率非常均匀,球面加工的非常完美,像差仍会存在。
几何像差主要有七种:球差、彗差、像散、场曲、畸变、位置色差及倍率色差。前五种为单色像差,后二种为色差。
1.球差
轴上点发出的同心光束经光学系统后,不再是同心光束,不同入射高度的光线交光轴于不同位置,相对近轴像点(理想像点)有不同程度的偏离,这种偏离称为轴向球差,简称球差( L )。如图1-1所示。
图 1-1 轴上点球差
2.慧差
彗差是轴外像差之一,它体现的是轴外物点发出的宽光束经系统成像后的失对称情况,彗差既与孔径相关又与视场相关。若系统存在较大彗差,则将导致轴
外像点成为彗星状的弥散斑,影响轴外像点的清晰程度。如图1-2 所示。
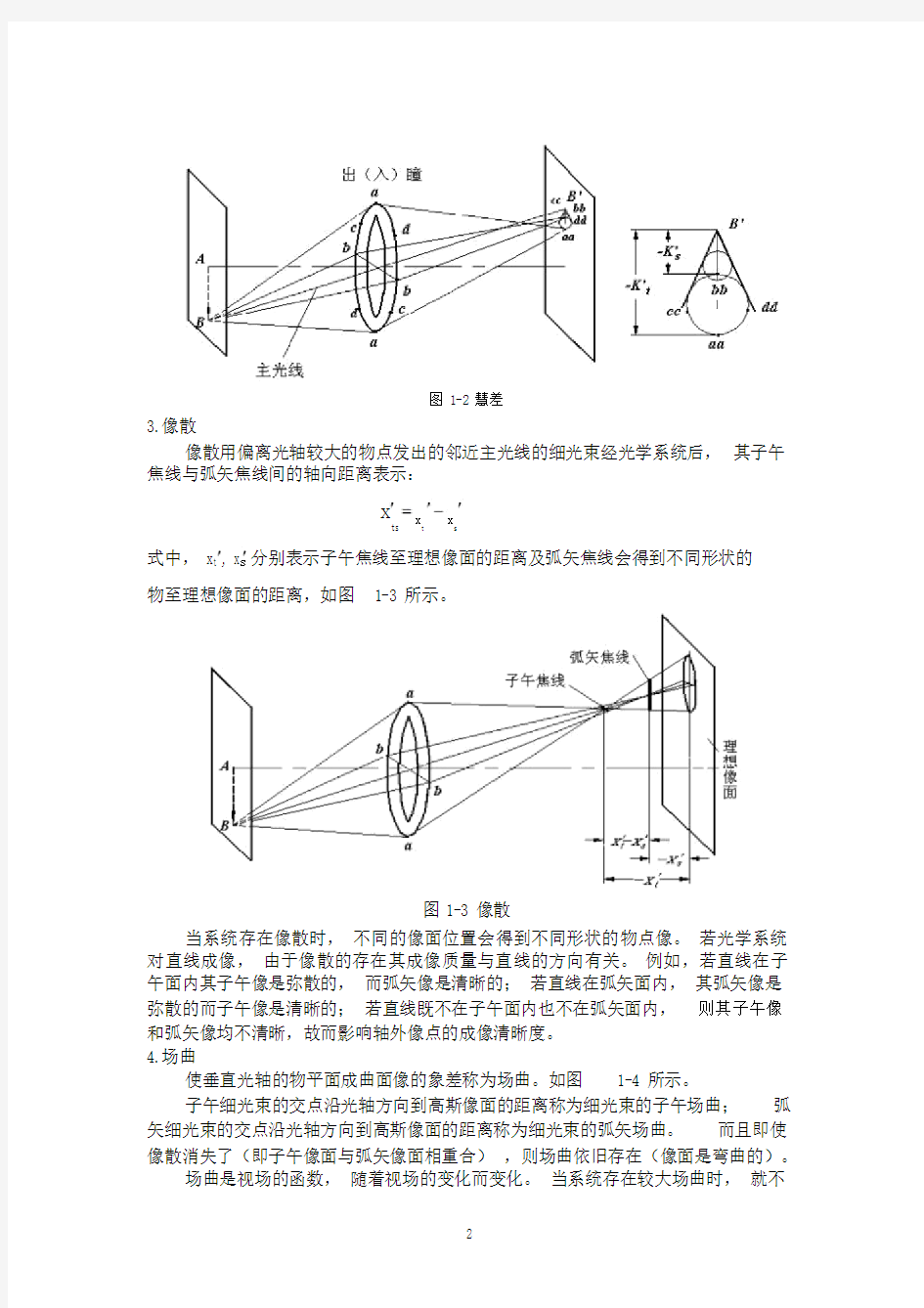
图1-2 慧差
3.像散
像散用偏离光轴较大的物点发出的邻近主光线的细光束经光学系统后,其子午焦线与弧矢焦线间的轴向距离表示:
x
ts x
t
x
s
式中, x t , x s分别表示子午焦线至理想像面的距离及弧矢焦线会得到不同形状的
物至理想像面的距离,如图1-3 所示。
图1-3 像散
当系统存在像散时,不同的像面位置会得到不同形状的物点像。若光学系统对直线成像,由于像散的存在其成像质量与直线的方向有关。例如,若直线在子午面内其子午像是弥散的,而弧矢像是清晰的;若直线在弧矢面内,其弧矢像是弥散的而子午像是清晰的;若直线既不在子午面内也不在弧矢面内,则其子午像和弧矢像均不清晰,故而影响轴外像点的成像清晰度。
4.场曲
使垂直光轴的物平面成曲面像的象差称为场曲。如图1-4 所示。
子午细光束的交点沿光轴方向到高斯像面的距离称为细光束的子午场曲;弧矢细光束的交点沿光轴方向到高斯像面的距离称为细光束的弧矢场曲。而且即使像散消失了(即子午像面与弧矢像面相重合),则场曲依旧存在(像面是弯曲的)。
场曲是视场的函数,随着视场的变化而变化。当系统存在较大场曲时,就不
能使一个较大平面同时成清晰像,若对边缘调焦清晰了,则中心就模糊,反之亦然。
图1-4 场曲
5.畸变
畸变描述的是主光线像差,不同视场的主光线通过光学系统后与高斯像面的交点高度并不等于理想像高,其差别就是系统的畸变,如图1-5 所示。
由畸变的定义可知,畸变是垂轴像差,只改变轴外物点在理想像面的成像
位置,使像的形状产生失真,单不影响像的清晰度。
图1-5 畸变
实验一应用平行光管测量位置色差
一、引言
平行光管是一种长焦距、大口径,并具有良好像值的仪器,与前置镜或测量显微镜组合使用,既可用于观察、瞄准无穷远目标,又可作光学部件,光学系统的光学常数测定以及成像质量的评定和检测。
二、实验目的
(1)了解平行光管的结构及工作原理
(2)掌握平行光管的使用方法
(3)了解色差的产生原理
(4)学会用平行光管测量球差镜头的色差
三、基本原理
根据几何光学原理 ,无限远处的物体经过透镜后将成像在焦平面上 ;反之 ,从透镜焦平面上发出的光线经透镜后将成为一束平行光。如果将一个物体放在透镜的焦平面上 ,那么它将成像在无限远处。
图 2-1 为平行光管的结构原理图。它由物镜及置于物镜焦平面上的分划板 , 光源以及为使分划板被均匀照亮而设置的毛玻璃组成。由于分划板置于物镜的焦平面上 ,因此 ,当光源照亮分划板后 ,分划板上每一点发出的光经过透镜后 ,都成为
一束平行光。又由于分划板上有根据需要而刻成的分划线或图案 ,这些刻线或图案将成像在无限远处。这样 ,对观察者来说 ,分划板又相当于一个无限远距离的目标。
图 2-1 平行光管的结构原理图
根据平行光管要求的不同 ,分划板可刻有各种各样的图案。图 2-2 是几种常见的分划板图案形式。图 2-2(a)是刻有十字线的分划板 ,常用于仪器光轴的校
正;图 2-2 (b) 是带角度分划的分划板 ,常用在角度测量上 ;图 2-2 (c) 是中心有一个小孔的分划板 ,又被称为星点板 ;图 2-2 (d) 是鉴别率板 ,它用于检验光学系统的成像质量。鉴别率板的图样有许多种 ,这里只是其中的一种 ;图 2-2 (e) 是带有几组一定间隔线条的分划板 ,通常又称它为玻罗板 ,它用在测量透镜焦距的平行光管上。
图 2-2 分划板的几种形式
光学材料对不同波长的色光有不同的折射率,因此同一孔径不同色光的光线
经过光学系统后与光轴有不同的交点。不同孔径不同色光的光线与光轴的交点也
不相同。在任何像面位置,物点的像是一个彩色的弥散斑,如图 2-3 所示。各种色光之间成像位置和成像大小的差异称为色差。
图 2-3 轴上点色差
轴上点两种色光成像位置的差异称为位置色差,也叫轴向色差。对目视光学系统用L FC表示,即系统对蓝光和红光的色差
L FC L F L C (2-1)
对近轴去表示为
l FC l
F
l
C (2-2)
根据定义可知,位置色差在近轴区就已产生。为计算色差,只需对 F 光和 C 光进行近轴光路计算,就可求出系统的近轴色差和远轴色差。
四、仪器用具
平行光管、色光滤色片、色差镜头、CMOS 相机、电脑、机械调整件等。
五、实验步骤
1.参考示意图 2-4,搭建观测位置色差的实验装置。
12 3 4 5
6
图 2-4 位置色差检测装置示意图
1. 光纤光源 4. 可调节棱镜支架
2. 平行光管 5. CMOS 数字相机
3. 色差镜头 6. 一维平移台
2.调节平行光管、被测镜头和CMOS 相机,使它们在同一光轴上。具体操作步骤:先取下星点板,使人眼可以直接看到通过平行光管和被测镜头后的会聚光斑。
调节被测镜头和 CMOS 相机的高度及位置,使平行光管、被测镜头和 CMOS 相机靶面共轴,且会聚光斑打在 CMOS 相机靶面上。
3.装上 25m 的星点板,微调CMOS相机位置,使得CMOS相机上光斑亮度最
强,如图2-5a 所示。此时在平行光管上加上蓝光(F)滤色片,可以看见视场变暗,此时调节 CMOS 相机下方的平移台,使 CMOS 相机向被测镜头方向移动,直到观测到一个会聚的亮点,如图 2-5b 所示,记下此时平移台上螺旋丝杆的读
数 X1。此时将 F 光滤色片换成绿光 (D)滤色片,可看见视场图案如图 2-5c 所示,然后调节平移台,使 CMOS 相机向远离被测镜头方向移动,又可观测到一个会聚的亮点,如图 2-5d 所示,记下此时平移台上螺旋丝杆的读数 X 2。再将 D 光滤
色片替换为红光 (C)滤色片,可看见视场图案如图 2-5e 所示,再次调节平移台,使CMOS 相机继续想远离镜头方向移动,又可观测到一个会聚的亮点,如图 2-5
所示,记下此时平移台上螺旋丝杆的读数X3。
a b c d e f
图 2-5 色差实验效果图
4.数据处理:
位置色差L F C L F L C
L
FD L
F
L
D
L
DC L
D
L
C
实验二星点法观测光学系统单色像差
一、引言
根据几何光学的观点,光学系统的理想状况是点物成点像,即物空间一点发出的光能量在像空间也集中在一点上,但由于像差的存在,在实际中式不可能的。评价一个光学系统像质优劣的根据是物空间一点发出的光能量在像空间的分布
情况。在传统的像质评价中,人们先后提出了许多像质评价的方法,其中用得最广泛的有分辨率法、星点法和阴影法(刀口法)。
二、实验目的
1.了解星点检验法的测量原理
2.用星点法观测各种像差
三、基本原理
光学系统对相干照明物体或自发光物体成像时,可将物光强分布看成是无数个具有不同强度的独立发光点的集合。每一发光点经过光学系统后,由于衍射和像差以及其他工艺疵病的影响,在像面处得到的星点像光强分布是一个弥散光斑,即点扩散函数。在等晕区内,每个光斑都具有完全相似的分布规律,像面光强分布是所有星点像光强的叠加结果。因此,星点像光强分布规律决定了光学系统成像的清晰程度 , 也在一定程度上反映了光学系统对任意物分布的成像质量。上述的点基元观点是进行星点检验的基本依据。
星点检验法是通过考察一个点光源经光学系统后在像面及像面前后不同截
面上所成衍射像通常称为星点像的形状及光强分布来定性评价光学系统成像质
量好坏的一种方法。由光的衍射理论得知 , 一个光学系统对一个无限远的点光源
成像 , 其实质就是光波在其光瞳面上的衍射结果 , 焦面上的衍射像的振幅分布就
是光瞳面上振幅分布函数亦称光瞳函数的傅里叶变换 , 光强分布则是振幅模的平方。对于一个理想的光学系统 , 光瞳函数是一个实函数 , 而且是一个常数 , 代表一个理想的平面波或球面波 , 因此星点像的光强分布仅仅取决于光瞳的形状。在圆形光瞳的情况下 , 理想光学系统焦面内星点像的光强分布就是圆函数的傅
里叶变换的平方即爱里斑光强分布,即
I ( r ) 2J1 (
2 )
I o
kr D r r
f F
式中,( )
I o 为相对强度(在星点衍射像的中间规定为),
r
为在像平面上
I r 1.0
离开星点衍射像中心的径向距离,J1() 为一阶贝塞尔函数。
通常,光学系统也可能在有限共轭距内是无像差的,在此情况下
k ( 2) siun ,其中u为成像光束的像方半孔径角。
无像差星点衍射像如图3-1 所示,在焦点上 ,中心圆斑最亮 , 外面围绕着一系
列亮度迅速减弱的同心圆环。衍射光斑的中央亮斑集中了全部能量的80%以上 ,
其中第一亮环的最大强度不到中央亮斑最大强度2%的。在焦点前后对称的截面上, 衍射图形完全相同。光学系统的像差或缺陷会引起光瞳函数的变化, 从而使对应的星点像产生变形或改变其光能分布。待检系统的缺陷不同 , 星点像的变化
情况也不同。故通过将实际星点衍射像与理想星点衍射像进行比较 , 可反映出待检系统的缺陷并由此评价像质。
图 3-1 无像差星点衍射像
四、仪器用具
平行光管、球差镜头、慧差镜头、像散镜头、场曲镜头、畸变镜头、CMOS 相机等
五、实验步骤
1.参考示意图 3-2,搭建观测轴上光线像差(球差)的实验装置。
12 3 4 5
6
图 3-2 轴上光线像差(球差)星点法观测示意图
1. 光纤光源 4. 可调节棱镜支架
2. 平行光管 5. CMOS 数字相机
3. 球差镜头 6. 一维平移台
2.调节各个光学元件与 CMOS 相机靶面同轴,沿光轴方向前后移动 CMOS 相机,找到通过球差镜头后,星点像中心光最强的位置。
3.前后轻微移动 CMOS 相机,观测星点像的变化,可看到球差的现象。效果图
可参考图 3-3。
图 3-3 球差效果图
4.参考示意图 3-4,搭建观测轴外光线像差(慧差,像散,场曲)的实验装置。
12 3 4 5
6
图 3-4 轴外光线像差星点法观测示意图
1. 光纤光源 4. 可调节棱镜支架
2. 平行光管 5. CMOS 数字相机
3. 轴外像差镜头 6. 旋转台
5.先按照图 3-2,调节各个光学元件与CMOS 相机靶面同轴,沿光轴方向前后移动 CMOS 相机,找到通过像差镜头后,星点像中心光最强的位置。
6.轻微调节像差镜头下方的旋转台,使像差镜头与光轴成一定夹角,观测 CMOS 相机中星点像的变化。轴外像差的效果图可参考图 3-5。
(a)慧差效果示意图
(b)场曲效果示意图
(c)像散效果示意图图3-5 轴外像差效果图
实验三光学系统像差的计算机模拟
一、引言
如果成像系统是理想光学系统 , 则同一物点发出的所有光线通过系统以后 , 应该聚焦在理想像面上的同一点 , 且高度同理想像高一致。但实际光学系统成像不可能完全符合理想 , 物点光线通过光学系统后在像空间形成具有复杂几何结构的像散光束 , 该像散光束的位置和结构通常用几何像差来描述。
二、实验目的
掌握各种几何像差产生的条件及其基本规律,观察各种像差现象的计算机模拟效
果图。
三、仪器用具
电脑主机及显示器一套、像差模拟软件
四、实验步骤
本实验主要是应用像差模拟软件,在电脑上观测球差、慧差及像散的光场分布图及三维效果图,以便学生更加深刻的理解各种单色像差的概念及对光学系统
的影响。
实验四阴影法测量光学系统像差与刀口仪原理
一、引言
刀口阴影法可灵敏地判别会聚球面波前的完善程度。物镜存在的几何像差使得不同区域的光线成到像空间不同位置上。刀口在像面附近切割成像光束,即可看到具有特定形状的阴影图;另一方面,物镜的几何像差对应着出瞳处的一定波像差,并由此可求得刀口图方程及其相应的阴影图。反之,由阴影图也可检测典型几何像差。刀口阴影法所需设备简单,检测法改变,直观,故非常有实用价值。
二、实验目的
1.熟悉刀口阴影法检测几何像差原理
2.掌握球差的阴影图特征
3.利用图像处理方法测量轴向球差
三、基本原理
对于理想成像系统 , 成像光束经过系统后的波面是理想球面(如图 4-1 所示 ) , 所有光线都会聚于球心 O。此时用不透明的锋利刀口以垂直于图面的方向向切割
该成像光束 , 当刀口正好位于光束会聚点 O 点处 (位置 N2时
, 则原本均照亮的
)
视场合变暗一些 , 但整个视场仍然是均匀的 (阴影图 M 2)。如果刀口位于光束交点
之前 (位置 N1) , 则视场中与刀口相对系统轴线方向相同的一侧视场出现阴影, 相反的方向仍为亮视场 (阴影图 M 1)。当刀口位于光束交点之后 (位置 N3) , 则视场中与刀口相对系统轴线方向相反的一侧视场出现阴影, 相同的方向仍为亮视场(阴影图 M 3)。
图 4-1 理想系统刀口阴影图
实际光学系统由于存在球差 , 成像光束经过系统后不再会聚于轴上同一点。此
时 , 如果用刀口切割成像光束 , 根据系统球差的不同情况 , 视场中会出现不同的图案形状。图 4-2 所示是 4 种典型的球差以及其相应的阴影图。图 4-2 中(a)和 (b)图为球差校正不足和球差校正过度的情况 , 相当于单片正透镜和单片负透镜球差情况。这两种情况在设计和加工质量良好的光学系统中一般极少见到 , 除
非是把有的镜片装反了 , 检验时把整个光学镜头装反了 , 或是系统中某个光学间
隔严重超差所致。 (c) 和(d)图所示为实际光学系统中常见的带球差情况。
利用刀口阴影法对系统轴向球差进行测量就是要判断出与视场图案中亮 2 暗环带分界 (呈均匀分布的半暗圆环 ) 位置相对应的刀口位置 , 一般系统球差的
表示以近轴光束的焦点作为球差原点。
图 4-2 系统存在球差时的阴影图
四、仪器用具
平行光管、色光滤波片、球差镜头、简易刀口、白屏、机械调整件等。
五、实验步骤
1.参考示意图 4-3,搭建刀口阴影法测量球差的实验装置。
图 4-3 刀口阴影法球差测量装置
1. 光纤光源 6. 白屏
2. 平行光管7. 旋转台
3. 轴外像差镜头8. 一维平移台
4.可调节棱镜支架
5.简易刀口
2.调节平行光管,球差镜头,刀口装置, CMOS 相机成像靶面共轴。在平行光的照射及视场光阑的作用下,被测系统将在 CMOS 相机靶面形成一具有明显边界轮廓、可反映被测系统孔径大小的图案。调整刀口装置的螺旋丝杆,使刀刃正好切在光轴上,若刀口轴前后移动时,刀口阴影图上的亮暗环带对称地扩大或缩
小,说明此时刀口的轴向一定那个方向已与光轴一致,否则应该继续调节螺旋丝杆,直到正好使刀刃切在被测系统的光轴上。
实验五剪切干涉测量光学系统像差
一、引言
利用玻璃平行平板构成简单的横向剪切干涉仪可以观察到单薄透镜的剪切干涉
条纹,并由干涉条纹分布求出透镜的几何象差和离焦量。
二、实验目的
利用大球差镜头的剪切干涉条纹分布测算出该镜头的初级球差比例系数和光路
的轴向离焦量。
三、基本原理
剪切干涉是利用待测波面自身干涉的一种干涉方法,它具有一般光学干涉测量方法的优点即非接触性、灵敏度高和精度高,同时由于它无需参考光束,采用
共光路系统,因此干涉条纹稳定,对环境要求低,仪器结构简单,造价低,在光
学测量领域获得了广泛的应用。横向剪切干涉是其中重要的一种形式。由于剪切干涉在光路上的简单化,不用参考光速,干涉波面的解比较复杂,在数学处理上
较繁琐,因此发展利用计算机里的剪切干涉技术是当前光学测量技术发展的热
点。
如图 5-1 所示,假设W和W分别为原始波面和剪切波面,原始波面相对于
平面波的波像差(光程差)为W ,,其中P,为波面上的任意一点P 的坐标,当波面在方向上有一位移 s (即剪切量为 s)时,在同一点p上剪切波面上的
波象差为 W (s, ) ,所以原始波面与剪切波面在P 点的光程差(波象差)为:
W ( , ) W ( , ) W (s, )(1)
16
图 5-1 横向剪切的两个波面
由于两波面有光程差W 所以会形成干涉条纹,设在P点的干涉条纹的级次为 N,光的波长为,则有,
W N (2) 能产生横向剪切干涉的装置很多,最简单的是利用平行平板。如图5-3 为平行平板横向剪切干涉仪的装置图。由于平行平板有一定厚度和对入射光束的倾
角,因此通过被检测透镜后的光波被玻璃平板前后表面反射后形成的两个波面发
生横向剪切干涉,剪切量为 s ,s 2dn cosi ',其中 d 为平行平板的厚度,n为平行平板的折射率, i' 为光线在平行平板内的折射角。s 一般为 1 到 3 毫米左右。当使用光源为氦氖激光时,由于光源的良好的时间和空间相干性,就可以看到很清晰的干涉条纹。条纹的形状反映波面的像差。
分析计算如下:
y
(x 0 ,y 0) ( , )
x
主光线
A O
物平面入射光瞳
图 5-2 计算原理图
如图 5-2 所示为光学系统的物平面和入射光瞳平面,其坐标分别为x, y 和,
平面 ,AO 为光轴。对于旋转轴对称的透镜系统,只需要考虑物点在y 轴上的情形(物点的坐标为 0, y0 )。波面的光程W 只是、和 y0的函数,即
W , , y0 E1 E3 (3) 其中 E1是近轴光线的光程
E1 a1 2 2 a2 y0 (4) 上式中, a1z 2 f 2 , a2 1 f , y0是物点的垂轴离焦距离,z 物点的轴向离焦距离。
E3是赛得像差(初级波像差系数:b场曲, b畸变, b球差, b慧差, b像散)
2
2
2
3
2
2 2
2
2
2
2
(5)
E 3 b 1 y 0
b 2 y 0 b 3
b 4 y 0
b 5 y 0 了 算 果的表达方便起 将( 1)式写成 称的形式,光瞳面
, 上原始波
面与剪切波面的剪切干涉的 果 :
W( , , s ) W ( s / 2, ) W ( s/ 2, )
(6)
将前面的公式( 4)(5)代入( 6)式就可得具体的表达式,下面只 透 具有
初 球差和 向离焦的情况。
(一) 束 (短焦距透 )焦点与被 准直透 焦点
F 不重合(即物点与 F
不重合),但只有 向离焦(
z 不 零, y 0 =0):
W( , ) a ( 2
2
) a y
(7)
1
2 0
由于剪切方向在 方向,所以:
W ( , , s) 2a 1 s (8) 所以干涉条 方程 :
m
(m=0, 1,
2, ?)( 平行于 , 隔
的
2a 1s
2a 1s
直条 ,剪切条 的零 条 在
0 )。
(二 ) 束 焦点与被 准直透 焦点 F 不重合,只有 向离焦(
z 不 零 ,
y 0 =0),透 具有初 球差(
b 3 不 零),.剪切方向在
方向:
W( , ) a 1( 2
2
) b 3( 2
2 )
2
(9)
所以波象差方程
W ( , , s) 2 s(a 1 2b 3 ( 2
2
)) b 3 s 3
(10)
此 亮条 方程
2 s( a 1 2b
3 (
22
))
b 3 s 3
m (m=0, 1, 2, ?)
(11)
(三)初 球差
L 与孔径的关系式 :
A
h
2
L
(12)
f
其中 h 22
2
, 和 孔径坐 , f 透 的焦距
f ,A 初 几何球
差比例系数。
而对应的波象差为其积分,即
W
n 2
h
h )2
L d ( (13)
f
将( 12)代入( 13)积分结果为,
W ( L )
Ah 4
b 3 ( 2
2 )
2
(14)
4 f 4
由于 h 2
22
,所以由( 14)可以求出 b 3 与 L 、A 的关系式为:
b 3
L
A
(15)
4 f
2 2
4 f 4
h
因此,在公式 (11)中,令 W
1 m 就得到实验中的暗条纹方程,即:
2
2 sa 1 4sb 3
3
4sb 3
2
b 3 s 31 m
(16)
2
利用最小二乘法拟合由实验图上暗条纹的分布解出 a 1 和 b 3 ,由公式 (4)的说明和
公式 (15)分别求出轴向离焦量
z 和初级球差 L 。
四、 仪器用具
He-Ne 激光器、衰减片、显微物镜(扩束镜) 、针孔、可调孔径光阑、平凸薄透镜( 100mm )、平行平晶、白屏、带变焦镜头的 CCD 、处理软件、轨道、支
杆、调节支座、平移台、旋转台、滑块、磁性表座。
1 2 3 4 5 6 7 8
9 10 11 12