文档库 最新最全的文档下载
当前位置:文档库 › 增量式PID算法
增量式PID算法

所谓增量式PID是指数字控制器的输出只是控制量的增量kuΔ。当执行机构需要的控制量是增量,而不是位置量的绝对数值时,可以使用增量式PID控制算法进行控制。
增量式PID控制算法可以通过(式1)推导出。
式1
由(式1)可以得到控制器的第k-1个采样时刻的输出值为:
式2
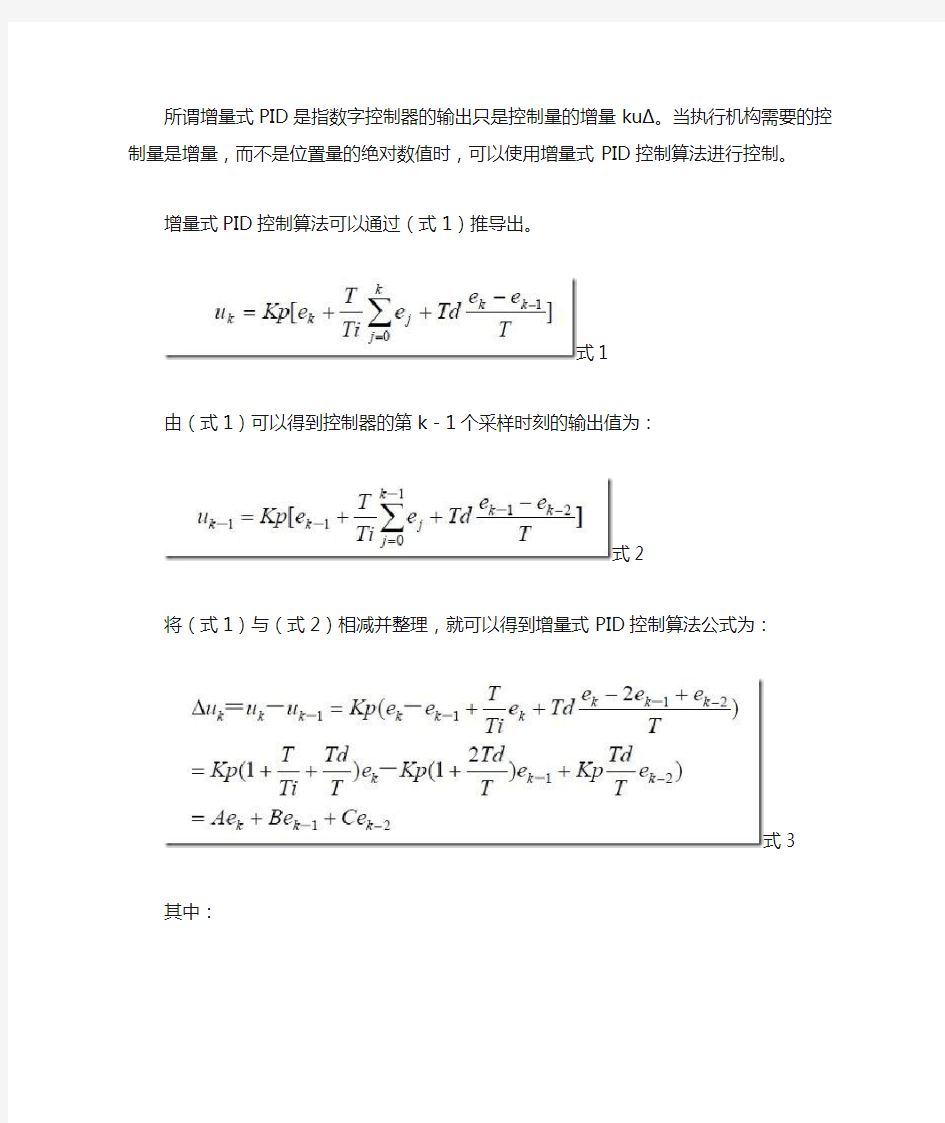
将(式1)与(式2)相减并整理,就可以得到增量式PID控制算法公式为:
式3
其中:
由(式3)可以看出,如果计算机控制系统采用恒定的采样周期T,一旦确定A、B、C,只要使用前后三次测量的偏差值,就可以由(式3)求出控制量。
增量式PID控制算法与位置式PID算法(式1)相比,计算量小的多,因此在实际中得到广泛的应用。
而位置式PID控制算法也可以通过增量式控制算法推出递推计算公式:
式4
上式就是目前在计算机控制中广泛应用的数字递推PID控制算法。
物理模型:
软件算法流程图流程图
在实际编程时α0、α1、α2可预先算出,存入预先固定的单元,设初值e(k-1)、e(k-2)为0。
增量式PID算法的优点(1)位置式算法每次输出与整个过去状态有关,计算式中要用到过去偏差的累加值,容易产生较大的积累误差。而增量式只需计算增量,当存在计算误差或精度不足时,对控制量计算的影响较小。
相关文档