现代战斗机的红外搜索与跟踪系统
现代战斗机的红外搜索与跟踪系统(上)
战斗机上有各种精密的航电装备,其中主动式电子扫描阵列雷达威力强大,可让战斗机同时接战来自不同方向的目标,甚至具有成为高能量武器及快速数据链的潜力,赋予战斗机前所未有的新战斗力。但雷达波会泄露飞机的行踪,妨害战斗机遂行任务,甚至危及战斗机的生存性。为兼顾搜索目标及避免敌方知悉我机动向,不会向外发射电磁波的被动式红外搜索与跟踪系统已成为现今新一代战斗机的必要装备。
前言
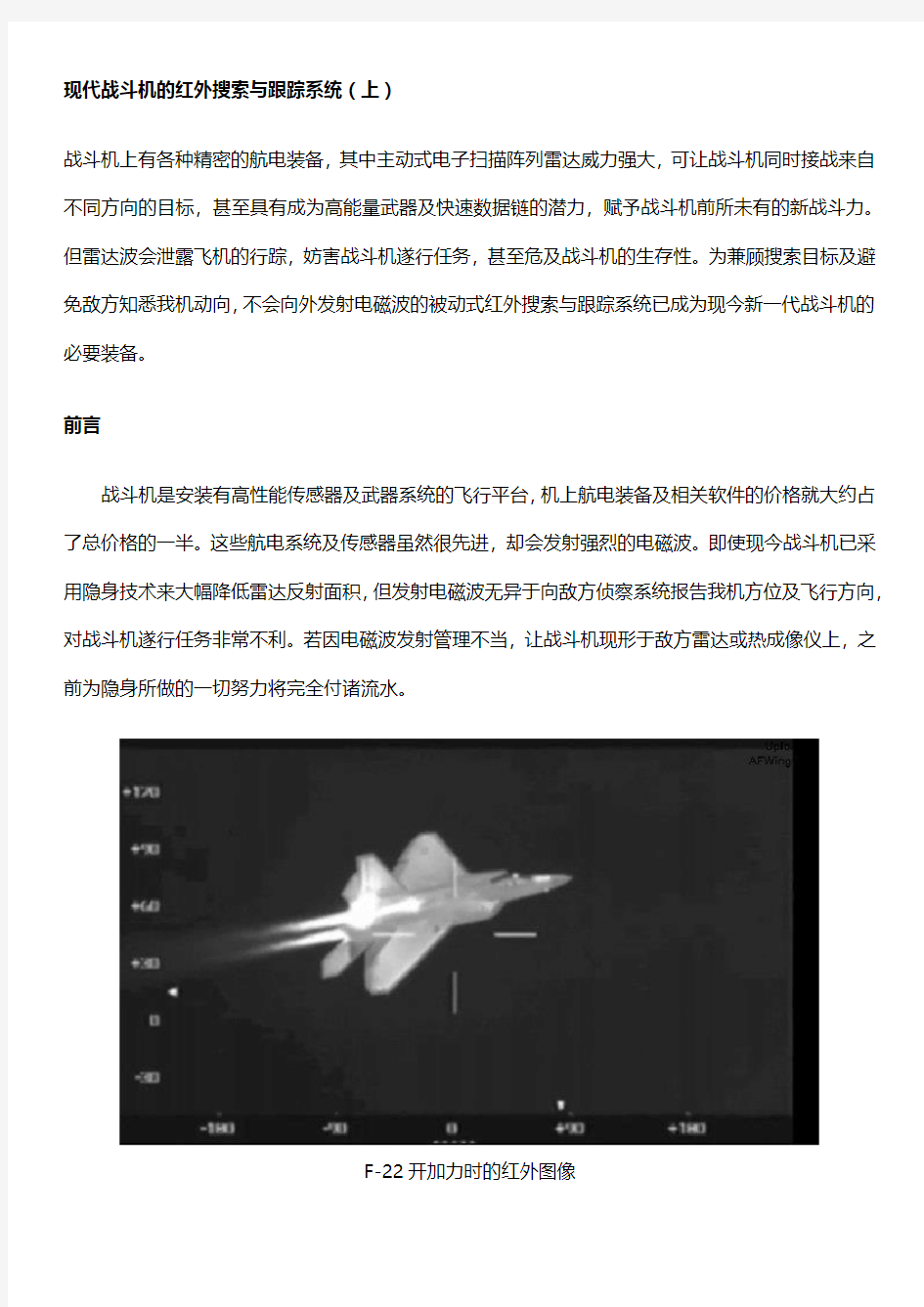
战斗机是安装有高性能传感器及武器系统的飞行平台,机上航电装备及相关软件的价格就大约占了总价格的一半。这些航电系统及传感器虽然很先进,却会发射强烈的电磁波。即使现今战斗机已采用隐身技术来大幅降低雷达反射面积,但发射电磁波无异于向敌方侦察系统报告我机方位及飞行方向,对战斗机遂行任务非常不利。若因电磁波发射管理不当,让战斗机现形于敌方雷达或热成像仪上,之前为隐身所做的一切努力将完全付诸流水。
F-22开加力时的红外图像
要解决这个难题,基本方法是降低本身发射的电磁波,根本解决之道则是使用先进、不发射电磁波的被动式传感器,让敌方侦察系统一无所悉。
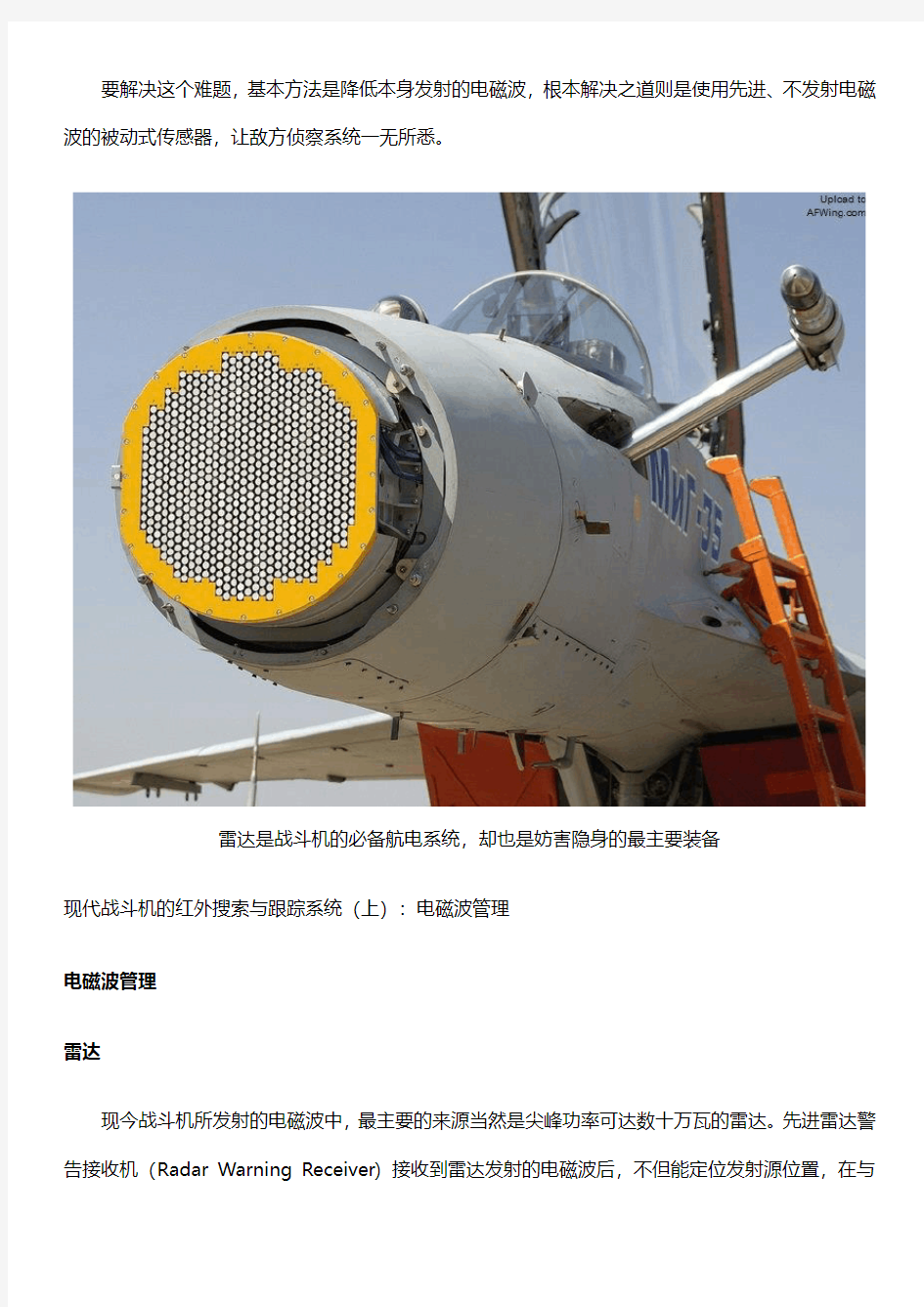
雷达是战斗机的必备航电系统,却也是妨害隐身的最主要装备
现代战斗机的红外搜索与跟踪系统(上):电磁波管理
电磁波管理
雷达
现今战斗机所发射的电磁波中,最主要的来源当然是尖峰功率可达数十万瓦的雷达。先进雷达警告接收机(Radar Warning Receiver)接收到雷达发射的电磁波后,不但能定位发射源位置,在与
计算机数据库对比后还能确定雷达的种类和战斗机的型号。虽然战斗机可采用“雷达静默”方式来躲避探测,但这只能偶尔为之,而且在躲避敌方探测和探测敌方目标间如何平衡也是一大难题。
低拦截率(Low Probability of Intercept)雷达可以解决部分难题,这种雷达的发射频谱很宽,使用最小的发射功率,并采取跳频(frequency hopping)技术,载波以特殊的传输顺序在多个频段内变换发射频率。这种传输方式有两个优点︰一、对窄频干扰有强大的反制能力;二、对窄频接收机而言,这种雷达波就如同多余的背景噪声,因此极难拦截。所以低拦截率雷达在搜索跟踪目标时,雷达警告接收机很难探测,战斗机能在不惊动敌方的情况下进行探测、识别、以及跟踪敌方的目标。
主动式电子扫描阵列雷达的波束狭窄,频率多变,波形变化多端,很难予以拦截雷达还可用脉冲压缩(pulse compression)技术来降低被探测到的机率。这是一种增加传输距离和提高信噪比(Signal-to-Noise Ratio)的信号处理技术,将发射脉冲先进行调变,并将反射信号与发射电磁波相对比,在距离与分辨率不变的情况下尖峰发射功率可以大幅降低。
在设计雷达时,若能减少旁波瓣(side lobe)及后波瓣(back lobe)的功率也能降低被拦截的机率。现今的相位阵列(phased array)雷达不但可控制旁波瓣的大小,还能以狭窄、移动迅速的电磁波进行型态复杂的搜索,用来对付雷达警告接收机效果斐然,即使被它探测到也会认为不值一顾。不过相位阵列雷达仍然需要高功率接收/发射模块,只是把机械式扫描天线(Mechanically Scanning Antenna)换成电子PIN二极管被动式移相器(phase shifter),不再需要机械扫描动作,对雷达运行或降低能量消耗也有相当的帮助。
最先进的低拦截率雷达是主动式电子扫描阵列(Active Electronic Scanned Array,AESA)雷达,这种雷达的发射和接收机被多个自备电源及放大器的发射/接收模块取代,每个发射/接收模块具备功率放大器、低噪音放大器、相位控制器及振幅控制装置,因而不需要高功率中央发射系统。除了在操作上更为便利之外,雷达扫描也非常迅速,因此很难予以拦截。据说F-22“猛禽”(Raptor)的AN/APG-77主动式电子扫描阵列雷达在对装有雷达警告接收机或电子支援措施(Electronic Support Measure)的敌机进行扫描时,敌机根本不知道已被雷达波笼罩。
AESA雷达的单个发射/接收模块
传统雷达是在一狭窄频段内发射低能量脉冲,AN/APG-77雷达则是以扩展频谱传送(spread spectrum transmission)技术在一宽带段内发射脉冲,各频段的回波由雷达信号处理器综合,从目
标传回的总能量与传统雷达相差无几,但每个脉冲的能量大幅减小,而且也不符合一般的雷达波调变型态,因此目标很难察觉F-22就在附近窥伺。
现代战斗机的红外搜索与跟踪系统(上):其它发射源
其它发射源
无线电传送也会惊动敌方,因而获知我机的方位,并且有可能由无线电特性知道飞机的型号。现今的战斗机可通过数据链接收语音或数据信息,但战斗机在网络中心化战争(Network Centric Warfare)背景下作战,除接收信息外也得传送大量的信息,数据链容易被探测或拦截,降低了飞机的隐身性能。F-22因此有两套数据链系统,一套使用标准的超高频/极高频(VHF/UHF)无线电频率;另一套是低功率、低拦截性的飞行中数据链(Intra flight Datalink),让各架F-22不需通过无线电通讯就能自动彼此分享目标与系统的信息。
F-22的AN/APG-77主动式电子扫描阵列雷达不但威力强大,且具备成为超级数据链的潜力为了消除数据链可能泄露行踪的顾虑,F-22正在提升AN/APG-77的性能,在2006年9月由诺格(Northrop Grumman)、洛马(Lockheed Martin)、L-3通讯(L-3 Communications)合作的一次测试中,F-22的AN/APG-77主动式电子扫描阵列雷达通过通用数据链(Common DataLink)的调制解调器仿真成无线网络中的一个节点(node),以每秒548Mb和每秒1,000Mb
以上的速率下载及上传数据,较美国现役传输速率每秒约1Mb的Link16强上几百倍,能在极短的时间内将数据传输完毕,降低泄露飞机行踪的风险。
飞机上的电子反制装备,尤其是各种干扰器也很容易泄露飞机的行踪及方位,使得是否该启动电子反制变成两难。一般而言,若已被敌方探测发现,就应该启动电子反制以迷惑或蒙骗敌方的雷达,但若敌方对我机仍毫无所悉时,就应该避免使用。
除了上述各种向外发射电磁波的装备外,飞机上各个电子开关在扳动时也会发出少量电磁信号,这对全金属飞机造成的问题较小,因为金属结构会吸收这部分的噪声,但对性质属于绝缘体的复合材料而言就不容小觑。
解决方案
主动式电子扫描阵列雷达性能强大,又有传输数据的潜力,必然仍是机上最重要的传感器,但由隐身的观点来看,雷达发射的电磁波不论如何降低强度,或是多么谨慎管理与控制,一旦被敌方探测到还是会成为敌方知悉我机行踪及方位的泄密源,而随着战斗机对隐身性能要求与日俱增,这一部分已是必须严肃以对的课题。
要确实解决电磁波发射的问题,唯有依赖全被动式传感器,在静默中搜索、探测、跟踪,不泄露任何信息给敌方的侦察系统。因此新一代战斗机都装上先进的红外搜索与跟踪(Infrared Search and Track,IRST)系统与雷达搭配,有时完全取代雷达的工作,有时则协同雷达进行搜索数据融合(data fusion)。红外搜索与跟踪与前视红外(Forward-Looking Infra-Red,FLIR)系统有些雷同,都使用红外技术,但前者很像雷达,能对整个空域进行搜索;后者则视野有限,主要用来产生影像画面。
红外搜索与跟踪系统可在静默中搜索、探测、跟踪,不泄露任何信息给敌方的侦察系统。图为“台风”
战斗机的海盗系统图像
现代战斗机的红外搜索与跟踪系统(上):技术与材料
技术与材料
任何物体在温度高于绝对零度时都会发出红外热辐射,尤其是飞机在高速飞行时与空气摩擦会无可避免地发出红外热辐射。所谓的红外搜索与跟踪系统就是一种被动式长波红外探测传感器,可在一般或电子干扰的环境下对远距红外热源进行监测及跟踪。也就是说红外搜索与跟踪系统就是被动式远
距离空中目标识别传感器,主要应用于战斗机空防任务上,在攻击、防御、或反制敌机的空优任务中都能强化战斗机的生存性及战斗力。
锑化铟中波红外探测阵列组件,一旁为英镑一便士
红外搜索与跟踪系统的分辨率较高,当敌机大举编队来袭时,能比雷达更快提供各架飞机的位置,并且对移动目标的跟踪较精确。系统获得的信息可自行运用,也能与其它传感器获得的信息相融合,进一步强化战斗机飞行员的态势感知,让他在远距离外就能探测、识别、接战敌对目标,拥有梦寐以求的“先敌发现、先敌射击”(first look,first shoot)先发制敌的能力。
红外搜索与跟踪系统也很适用于空对地任务,可提供准确的地面移动目标指示(Ground Moving Target Indicator)以及大范围地面图像更新,这已逐渐成为北约空军此系统的主要应用项目。
红外被动式系统的关键技术是红外跟踪仪,会扫描视野所及之处,搜索特定波长或特定频宽的红外信号,并精确量测发射源的角度坐标,整个过程不会产生任何电磁波。最复杂的红外跟踪仪使用聚焦平面阵列(Focal Plane Array)探测组件,它们是具有光电特性的小型半导体,随照射光波长而有不同的电气特性,探测组件探测整个视野,摄得的影像由前视红外或影像处理软件呈现于显示器。
红外传感器摄得的AH-64D阿帕奇影像,发动机排气部分特别明显红外波长范围涵盖0.75-1000微米,介于可见光与微波之间,大气中某些分子(如二氧化碳、水蒸气…等)及微粒子对于红外传输均能造成衰减,能够顺利透过大气的红外辐射主要波段范围为1-2.7微米(短波红外)、3-5微米(中波红外)、及8-14微米(长波红外),此三个波段范围称为红外的大气窗口,绝大部分红外军事探测器工作波长都介于这二个波段内。现今红外探测组件使用的材料有四种,碲汞镉(mercury-cadmium-telluride)最佳,对长波红外有极佳的灵敏度,但制造很困难;其次是硅化钛(platinum silicide),灵敏度稍逊,但制造简单许多;另外还有锑化铟(Indium antimonide)和硅化铱(Iridium silicide)。
碲汞镉︰在8~12微米波段的灵敏度极佳,但要制成阵列很困难,组件灵敏度差异很大,影像软件非常难处理。
锑化铟︰用在5.5微米波段内,比碲汞镉容易制造,组件灵敏度也很均衡。
硅化钛︰限用于2.5~4微米波段内,灵敏度只有碲汞镉的五十分之一。优点是组件灵敏度非常平均,容易制造且成本低廉。
硅化铱︰适用于8~12微米波段内,灵敏度可与碲汞镉相媲美,不过制造不够成熟,不适用于大量生产。
红外探测组件冷却后的温度决定其灵敏度以及能探测的波长,因此红外跟踪系统使用时需要冷却。战斗机上的红外搜索与跟踪系统使用闭路式(close-cycle)冷煤以缩短系统的整备时间(turn around time)。大多数探测组件先天上对可见光敏感,因而会产生一些问题。最简单的解决方法是在探测器的镜头前方加个滤光片,滤除不需要的可见光及红外线,一般是在探测器半透明外罩贴上数层很薄且厚度各异的玻璃膜,各层膜的反射系数不同且厚度为欲探测红外波长的倍数,如此一来不需要的光线就会被反射排除,需要的红外线就能长驱直入。红外制导导弹及红外搜索与跟踪传感器玻璃外罩上的一层金色薄膜,就是一种滤光膜。
红外搜索与跟踪系统的视窗一般都是贴膜的
战斗机在高速飞行时,探测器的半透明外罩很容易因沙尘或雨滴吹袭而受损,使探测信号扭曲,减低了系统性能。最好的解决方式是以硬度仅次于人造钻石的人造蓝宝石来做外罩,不过人造蓝宝石很贵,要加工制成外罩的半球型也不是件容易的事。
洛马“狙击手”瞄准吊舱的视窗就是人造蓝宝石玻璃制造的,这种平板视窗容易制造
现代战斗机的红外搜索与跟踪系统(上):操作特性
操作特性
红外搜索与跟踪系统的基本使用原则是:在作战时使用雷达,在其它时间使用红外搜索与跟踪系统,让敌人毫无所觉,进而为空战创造胜利基础。当代红外搜索与跟踪系统扫描空域的方式与雷达相近,发现敌踪时会在显示器上呈现目标的位置及相关信息;操作方式也与雷达相近,飞行员可设定仅跟踪特定的目标或是仅扫描疑有敌机出没的特定方向。有些红外系统也会搭配光学瞄准器来识别远方目标。
在敌机毫无察觉下发现其信号,我机就能飞到有利位置发射导弹,若再搭配激光测距仪,则还能对更远的目标进行探测,或获得完整信息来射击炮射击及发射导弹。即使敌机怀疑遭受探测,也无法对红外搜索与跟踪系统进行干扰。空战时若能综合运用红外搜索与跟踪、大离轴角度红外空对空导弹、头盔瞄准/显示系统,则能扩展导弹可发射区,并在接战时多出宝贵的几秒,拥有前所未有的空战优势。
红外搜索与跟踪系统是内置式还是外挂吊舱式好?这是个永无休止的争论。由于光电传感器的小型化,现已能把红外搜索与跟踪或前视红外系统安装于战斗机的机鼻,无需在机翼下多挂一具特制吊舱,不但可减少风阻,也不会占用原本可挂载武器的挂架。前视红外不论日夜或天候,都能提供精确的导航信息,不需要地形跟踪雷达或雷达高度计。在传感器日愈小型化的情况下,吊舱式红外搜索与跟踪系统对重量及空间没有严苛限制,使用弹性、适应性、以及性能表现都较好。
外挂式吊舱的使用弹性更好,图为F-16的AAQ-14瞄准吊舱
然而,不论传感器安装于何处,也不论是主动或被动式系统,最重要的是不能增加飞行员的工作负荷,并确定他能利用所有的可用信息,掌控战斗机周遭的态势感知,这也是新航电系统研制的最大挑战。战斗机任务日愈复杂,飞行员担负的工作项目越来越多,因此要增加任何一项航电系统并不像表面上的那样容易,必须注意传感器显示的信息足以让飞行员一目了然,且符合飞行员的直觉反应。
要完成上述目标,需要借助人因工程及人机接口技术,最理想的情况是全面信息融合,飞行员不需费心分析各传感器的信息,由系统持续地将最佳的整体态势画面呈现在飞行员的眼前。
现代战斗机的红外搜索与跟踪系统(上):俄罗斯发展
俄罗斯发展
机载红外搜索与跟踪系统起源于60年代中期,当时美国空军的F-101B“巫毒”(Voodoo)及F-102“三角剑”(Delta Dagger)战斗机率先在机上安装了原始的红外搜索与跟踪系统。不过把此系统发扬光大的却是苏联,全球第一种安装现代化红外搜索与跟踪系统的战斗机一般公认是米格-29,当此系统随着米格-29现身于80年代的各国航空展时,西方军事观察家大为惊讶,甚至认为机鼻上半球型物体内装的是电子战天线。
F-101战斗机的红外搜索与跟踪系统
俄罗斯最先问世的红外搜索与跟踪系统,是安装于米格-29和苏-27战斗机上的光电指向站(Optical Electronic Pointing Stations)。
率先安装OEPS-29现代化红外搜索与跟踪系统的米格-29 米格-29和苏-27分别安装OEPS-29和OEPS-27,两者基本上相同,只是OEPS-27较大、较重(OEPS-27重174公斤,OEPS-29重78公斤)、探测距离较远、视角较大。OEPS-29的水平探测视角±30度,垂直探测视角-15度到+30度;OEPS-27的水平探测视角±60度,垂直探测视角-15度到+60度。
OEPS-29系统
OEPS-27系统
根据目标的红外信号大小,OEPS-27的探测距离可达50公里,相搭配的激光测距仪探测距离8公里,两者都放在风挡前方的透明半球型罩内;OEPS-29的红外传感器较小,探测距离15公里。
OEPS-29和OEPS-27的功能大同小异,并已和俄罗斯早期的SHCH-3UM及后期的SURA头盔式目标指示系统(Helmet-Mounted Target-Designations System)综合成一体。
安装了SHCH-3UM目标指示系统的Zsh-5头盔
通过目镜看到的准星,还是比较原始的设计
OEPS-29和OEPS-27随着载机的改进发展也研制出性能强化的新版本,探测距离更远,识别目标能力更强。OEPS-30I(31E-MK)专门为苏-30MKK设计的型号。
苏-30MKK的OEPS-30I(31E-MK)系统
OLS-30是OEPS-27的加强型,也有了新的名称——光学定位站(Optiko-Lokatsionnaya-Stantsiya,英文为Optical Locator Station,OLS),为苏-30MKI系列战斗机的定制版。OLS-30(36Sh-01)装有隔绝震动的接收机和新型冷却系统,使用可靠性更好的进口零件,提升平均故障间隔时间(Mean Time Between Failure)。36Sh-01搭配扫描式探测
器、激光测距仪、以及综合式监视系统,可在电子干扰的环境下,排除地面噪声、云雾、以及水面反射的影响,日夜对空中目标做全方位的被动式搜索、探测、跟踪。激光测距仪可提供精确的距离数据,让载机可以发射近距空空导弹,或对地面抛投炸弹。
苏-30MKK的OLS-30(36Sh-01)系统
现代战斗机的红外搜索与跟踪系统(上):俄罗斯发展2
在最新研制的苏-35战斗机上,乌拉光学机械厂(Urals Opticaland Mechanical Plant)安装了探测距离及目标识别能力大幅提升的OLS-35,在2007年巴黎航空展首次现身。OLS-35有扫描式红外探测阵列、日间电视系统、多模式激光测距/目标指示仪、全视野稳定系统、以及综合式监视屏幕。OLS-35强化了全方位搜索、探测、以及跟踪目标的能力。激光测距/目标指示仪可精确量测斜距离(slant range),将角度及距离传输给苏-35的光电瞄准导航系统,可为中程空空导弹的发射及机炮射击指示目标。
OLS-35系统
OLS-35系统包括扫描式红外搜索器(水平视角±60度,垂直视角-15到+55度)、识别空中及地面目标的日间摄影机、适用于空中及地面目标的多模式激光测距/指示器、视野稳定系统、内置新算法先进软件的综合式控制系统。系统功能包括︰
-搜索及跟踪前、后半球形区域内的空中目标,探测距离分别为40及70公里
-肉眼识别8到10公里内的目标,20公里内测定距离、指示及自动跟踪飞行中的空中目标
基于卡尔曼滤波器的雷达目标跟踪(完整资料).doc
此文档下载后即可编辑 随机数字信号处理期末大作业(报告) 基于卡尔曼滤波器的雷达目标跟踪 Radar target tracking based on Kalman filter 学院(系):创新实验学院 专业:信息与通信工程 学生姓名:李润顺 学号:21424011 任课教师:殷福亮 完成日期:2015年7月14日
大连理工大学Dalian University of Technology
摘要 雷达目标跟踪环节的性能直接决定雷达系统的安全效能。由于卡尔曼滤波器在状态估计与预测方面具有强大的性能,因此在目标跟踪领域有广泛应用,同时也是是现阶段雷达中最常用的跟踪算法。本文先介绍了雷达目标跟踪的应用背景以及研究现状,然后在介绍卡尔曼滤波算法和分析卡尔曼滤波器性能的基础上,将其应用于雷达目标跟踪,雷达在搜索到目标并记录目标的位置数据,对测量到的目标位置数据(称为点迹)进行处理,自动形成航迹,并对目标在下一时刻的位置进行预测。最后对在一个假设的情境给出基于卡尔曼滤波的雷达目标跟踪算法对单个目标航迹进行预测的MATLAB仿真,对实验的效果进行评估,分析预测误差。 关键词:卡尔曼滤波器;雷达目标跟踪;航迹预测;预测误差;MATLAB 仿真 - 1 -
1 引言 1.1 研究背景及意义 雷达目标跟踪是整个雷达系统中一个非常关键的环节。跟踪的任务是通过相关和滤波处理建立目标的运动轨迹。雷达系统根据在建立目标轨迹过程中对目标运动状态所作的估计和预测,评估船舶航行的安全态势和机动试操船的安全效果。因此,雷达跟踪环节工作性能的优劣直接影响到雷达系统的安全效能[1]。 鉴于目标跟踪在增进雷达效能中的重要作用,各国在军用和民用等领域中一直非常重视发展这一雷达技术。机动目标跟踪理论有了很大的发展,尤其是在跟踪算法的研究上,理论更是日趋成熟。在跟踪算法中,主要有线性自回归滤波、两点外推滤波、维纳滤波、加权最小二乘滤波、β α-滤波和卡尔曼滤波,其中卡尔曼滤波算法在目标跟踪理论中占据了主导地位。
直升机飞控系统自驾功能故障分析
直升机飞控系统自驾功能故障分析 “自驾”功能是直升机飞控系统的基本工作方式,可以改善直升机的飞行品质进而减轻飞行员的操纵负荷。“自驾”功能的实现主要依靠飞控操纵台功能请求和计算机的软件逻辑来共同完成。首先飞控操纵台软件要采集“自驾”功能按键状态,并将状态请求结果通过429数字总线转发给飞控计算机,系统应用软件再经过功能接通/断开的逻辑判断,决定“自驾”功能的接通或断开,最终将状态信息反馈给操纵台,操纵台点亮“自驾”模态指示灯。 标签:直升机;飞控系统;自驾功能;故障分析 引言 早期的直升机由于执行任务比较简单,性能要求也比较低,直升机不稳定运动模态的发散周期比较长,驾驶员可以对这种不稳定的发散模态进行不断的人工修正。随着直升机性能不断提高,以及执行的任务越来越复杂,尤其是武装直升机,不仅要执行反潜、对地攻击、对空射击等任务,而且要完成超低空贴地飞行,进行地形跟随与地形回避机动,抵御阵风扰动等操纵,再加上直升机固有的不稳定性,仅仅依靠人工操纵已十分困难。因此,与定翼机相比,直升机更需要增稳系统、控制增稳系统或自动飞行控制系统。 1飞控操纵台功能及结构 飞行控制操纵台采用同构型双余度结构。每个通道硬件配置完全相同,采用通道内自监控为主、通道交叉监控为辅的双通道热备份工作方式。具有故障隔离、故障申报、通道自动切换等功能。产品通过ARINC429总线与飞控计算机进行交联。综合处理板A和综合处理板B分别完成飞控系统功能按键、旋转编码开关等操作指令采集后,向飞控计算机发送飞控系统操作请求,得到飞控计算机反馈信息后,经综合处理板进行数据比较监控、表决后向显示控制单元输出点灯信号,同时将接收到的飞控计算机故障信息、舵面位移、给定数据反馈等信息通过RS422总线发送至显示控制单元液晶显示屏。 1.1故障现象 2017年,有机组反映某架直升机在平飞状态下,2分钟内三次出现飞控操纵台上无线电高度保持功能指示灯自动点亮现象,每次按压按键后指示灯均会熄灭。返航后地面滑行时,断开飞控系统各功能后又出现无高保持功能指示灯自动点亮现象。将该飞控操纵台返回厂家按国军标要求做常温和高、低温条件下工作能力测试后故障未复现。继续进行振动条件下工作能力测试,故障复现,确认为飞控操纵台故障。 1.2故障分析
跟踪雷达基础知识讲
18.5 目标捕获和距离跟踪 距离跟踪就是连续测量从发射射频脉冲到目标回波信号返回之间的延时的过程。距离测量是雷达最精确的位置坐标测量。其典型数据是在测量几百英里距离时精密到几码以内。通常距离跟踪是从其他目标中鉴别出所需目标的主要方法,通过距离波门(即时间选通)从误差检波器输出中消除其他目标的回波(虽然也有用速度鉴别和角度鉴别的)。距离跟踪电路也可用来捕获所希望的目标。距离跟踪不仅必须测量脉冲从雷达到目标的往返行程时间,而且必须识别出反射信号是一目标而不是噪声,并且保存目标的距离随时间变化的历程。 这里的讨论适用于典型的脉冲跟踪雷达。距离测量也可以用使用调频连续波的连续波雷达来完成,这种调频连续波通常是一种线性调频波。目标距离由回波信号和发射信号之间的频率差异决定。考虑到多普勒效应的调频连续波系统的性能见参考资料1。 捕获 距离跟踪的第一个作用是捕获所需的目标。虽然这不是跟踪工作,但在典型的雷达里这是实现距离跟踪或角跟踪之前必需的第一步。对于窄波束跟踪雷达而言,为使天线波束指向目标的方向,必须具备有关目标角位置的某些信息。这个信息叫做引导数据,可以由搜索雷达或其他来源提供。引导数据可以足够精确地把窄波束指向目标或者可以要求跟踪器扫描一个较大的不确定区域。雷达距离跟踪的优点是能看到从近距离一直到雷达的最大距离上的所有目标。通常把这个距离分成小段,其中各段可以同时检验是否有目标存在。当需要波束扫描时,距离跟踪器可在短时间里(如0.1s)检验各段情况,即可作出关于目标是否存在的判断。如果没有目标存在,就让波束移向新的位置。这个过程对机械式跟踪而言是完全连续的,因为机械式跟踪移动波束相当慢,因此使得在对各段距离进行检验的短时间内目标仍然留在波束宽度之内。 与搜索雷达一样,目标捕获要考虑实现给定的检测概率和虚警概率所需的信噪比门限和积累时间[1]。然而,与搜索雷达相比,目标捕获可使用较高的虚警概率,这是因为操纵员知道目标是存在的,不存在在等待目标时由于虚警而使操纵员疲劳。最佳虚警概率的选择是以电路的性能为基础的,此电路可观察各距离间隔以判断哪一个间隔中有目标回波。 其典型的技术是使门限电压足够高,以防止大多数噪声尖峰超过门限,可是又要低得足以让弱信号通过。在各个发射脉冲之后即可观察所检验的距离间隔是否有信号超过了门限。积累时间允许雷达在判决是否有目标存在之前进行几次这种观察。噪声和目标之间的主要区别在于超过门限的噪声尖峰是随机的,但如果有目标存在,则当它超过门限时就比较有规律。一种典型的系统就可简单地计算在积累时间内超过门限的次数,并在超过的次数大于雷达发射次数的一半时,就指出是否有目标出现。若雷达脉冲重复频率是300 Hz,积累时间是0.1s,则在有一个强而稳定的目标时,雷达就能观察到30次超过门限。由于从弱目标来的回波加上噪声不一定总是超过门限,所以可以规定一个界限,如15次,在积累时间里,必须超过这一界限才判定有目标出现。对于非闪烁目标,预期的性能为:在信噪比为2.5dB时,发现概率是90%,虚警率是10-5。AN/FPS—16和AN/FPQ—6测量雷达均使用这些检测参数,每次捕获可使用10个邻接的波门,每个波门宽为1000yd。这10个波门覆盖了5n mile的距离间隔。
美国战斗机(共5集)——05
F-105: 研制国家:美国,名称:雷公(Thunderchief) 一、概述: F-105是从一开始就作为战术空军司令部超音速战斗轰炸机而设计的第一种飞机,50年代初美国的战略思想是立足于打核战争,战术空军也要具备战术核轰炸能力。只制造了两架原型机F-105“雷公”于1952年作为共和航空公司的AP-63设计开始发展。1955年10月22日,第一架YF-105A(共两架)飞行,装一台普拉特?惠特尼J57-P-25 发动机。但在1956年5月出现的F-105B-1飞机上,采用了推力更大的J75-P-3 发动机和面积律的理论。这是1954财政年度最初15架飞机订货中的第3架飞机,其余的飞机(到F-105B-6)是到1957年完成的,供系统试验用。 F-105有B、D、F和G四种主要型别,共生产833架。其中F-105B是昼间战斗轰炸机,共生产78架。该机装备MA-8 火力控制系统,其主要部件是E-50(K-19)前置计算瞄准具、E-34(AN/APG-34)雷达测距器、E-30拉起轰炸计算机和KB-3照相枪。后来B型飞机又增加了AN/ARW-77“小斗犬”导弹控制器。F-105D是全天候战斗轰炸机,1959年6月首次试飞,共生产610架。该机装备AN/ASG-19 全天候火力控制系统和AN/ARW-77“小斗犬”导弹控制器,提高了对地攻击能力。系统的主要部件是瞄准具、搜索和测距雷达、拉起轰炸计算机和轰炸双向定时器。F-105F是双座教练和战斗轰炸机。1963年6月首次试飞,共生产143架。该机火力控制设备与D型相同。F-105G是由F-105F改装的反雷达攻击机。装备有各种电子战设备和AGM-45“百舌鸟”、AGM-78 标准反辐射导弹。各型F-105均于1965年全部停产。后来F-105的任务逐渐被变后掠翼战斗轰炸机F-111所代替。到1984年,所有的F-105退出了现役。 二、性能指标(F-105D) 尺寸数据:翼展10.65米,机长19.58米,机高5.99米,机翼面积35.76平方米、后掠角45度、展弦比3.18。 重量数据:空重12474千克,正常起飞重量17250千克,最大起飞重量23834千克。 性能数据:最大平飞速度(高空)M2.0/2120 千米/小时,(低空)M1.08,最大爬升率175米/秒,实用升限15850米,作战半径386~1460千米,转场航程3700千米。起飞滑跑距离800米,着陆滑跑距离700米。 武器装备:1 门20毫米6 管机炮(备弹1029 发),弹舱内可挂1 颗1000 千克或4 颗110 千克炸弹或核弹,翼下挂架可挂各种常规炸弹、“小斗犬”空对地导弹、“响尾蛇”空对空导弹等,最大载弹量5900 千克。 动力装置:1台J75-P-19W 涡喷发动机,加力推力107.8千牛,喷水加力推力117.9千牛。
飞控试验通用测试分析系统研究
飞控试验通用测试分析系统研究 摘要:设计实现了一种飞机飞行控制系统地面试验的通用测试和分析系统,系统软硬件均采用了模块化的设计技术,详细介绍了系统的硬件组成、软件架构,硬件系统采用通用计算机为控平台,测试仪器以VXI、GPIB设备为主,研制了通用的信号调理转接组合,软件设计采用了多线程、多进程技术和网络数据库技术,各个功能模块既可以独立运行于网络节点,也可以协同工作,系统支持了任意公式定义、计算处理功能,图形任意取点分析等通用分析功能,同时完成了数字多用表、存储示波器、XY记录仪、动态信号分析仪和频率响应控制仪等多种虚拟仪器功能,满足了飞控试验测试分析系统的需求。 关键词:飞行控制系统;通用测试系统;通用分析系统 1引言 航空传动、操纵及控制等系统结构复杂,各部件性能参数的变化对飞行系统的性能会产生重要的影响。对仿真实验、地面测试试验,测试系统不仅需要有较高的测量精度,而且要反复设置各种不同的输入条件,对各子系统进行反复的测试、分析、计算,用于飞控系统的设计验证、校正、改进。因而研制通用化和使用方便的测试系统尤为重要。 为实现测试系统的可重用性和互操作性,必须分类总结不同机型、机种航空飞行控制系统的测试分析需求,从系统软件结构、系统硬件结构设计上实现模块化、系列化、通用化,以满足已知的测试分析需求、并兼顾未知测试分析需求的实现。 本文概括介绍用于多种型号飞机飞控系统的某通用测试分析平台的系统设计、以及软硬件的通用性设计和实现。 2通用测试平台总体考虑 在飞行控制系统的测试试验中,至少要完成上百个大项目、数百个参数的测试分析。例如,要对飞机的舵系统、翼系统、操控系统等施加激励信号,通过对压力、拉压力、踏力、角位移、线位移、速度、加速度、角速度、电压信号、开关信号、阶跃和脉冲响应、频率响应等的测试,完成机械系统的刚度、传动比、间隙、操纵权限、阶跃响应、频率响应等静态特性和动态特性的分析。 考虑到系统高可靠性的要求、各种测试总线技术发展状况以及这些技术目前在我国应用的现状,结合与原有某型号测试系统的兼容性、互操作性,本测试系统的设计以VXI总线设备为主,结合高性能的GPIB总线通用测试设备。用VXI总线信号源为被测对象提供驱动,通过通用信号调理转接组合,最后由各种仪器模块采集信号,通过计算机网络把测试设备和应用系
单脉冲雷达角度跟踪技术研究
单脉冲雷达角度跟踪技术研究 【摘要】简单介绍了单脉冲雷达的特点及工作原理,重点分析了多部干扰机对单脉冲雷达的角度干扰问题,并对相干干扰和非相干干扰的干扰效果进行了讨论,指出两点源非相干干扰是实际工程中一种比较理想的干扰方式。 【关键词】单脉冲雷达、角度跟踪、相干干扰、非相干干扰 一、引言 对雷达进行干扰要对准雷达的四个系统:显示系统、距离跟踪系统、速度跟踪系统和角度跟踪系统。在雷达发展的早期,只要对前三个系统中的一个(或两个)系统进行有效地干扰,就可达到破坏雷达角跟踪系统正常工作的目的。现在随着新体制雷达的出现和抗干扰技术的不断提高,尤其是单脉冲雷达体制的出现,使很多干扰技术难以奏效。本文以振幅和差式单脉冲雷达为例,讨论了用多部干扰机对单脉冲雷达实施干扰的情况。 二、分析 1.单脉冲雷达 ◆定义 单脉冲雷达是指由单个回波脉冲即可获得目标空间角信息的雷达。 ◆特点 单脉冲雷达是一种精密跟踪雷达。它有较高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达早在60年代就已广泛应用。美国、英国、法国和日本等国军队大量装备单脉冲雷达,主要用于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等;在民用上主要用于中交通管制。目前使用的单脉冲雷达基本上都实现了模块化、系列化和通用化,具有多目标跟踪、动目标显示、故障自检、维修方便等特点。 ◆分类 根据从回波中获取角信息的方式(测角法)不同,单脉冲雷达可分为振幅法(比幅)、相位法(比相)和综合法(振幅相位)3种。这3种测角法又可用3种角度鉴
别器(振幅式、相位式、和差式)中的任何一种来获得目标的角度信息,因此综合起来有9种形式的单脉冲雷达系统,其中以振幅和差式单脉冲雷达系统用的最多。通常分为有振幅比较单脉冲雷达和相位比较单脉冲雷达两大类。 工作原理 单脉冲雷达每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。它具有圆锥扫描雷达所没有的优点:获得角误差信息的时间短(以微秒计算);不受回波振幅起伏变化的影响;测角精度高(0.1~0.5mil);测角支路抗幅度调制干扰(如回答式倒相干扰)的能力强。振幅和差式单脉冲雷达系统的基本工作原理:将两个比幅天线方向图所得的幅度不同的信号经过和差变换器之后,再把和信号(U∑ )、差信号(U△ )加到鉴相器得出差信号。 2 雷达角跟踪技术 2.1 信号处理和测量技术 PD采用一种合适的且可以适当改变的配置方式及数据处理算法,可成功的实现跟踪低仰角目标。假定一种处理算法,地面的反射系数应有一个确定的模型(如镜面反射和几何光学原理),重要的是要估计这样的算法偏离假定的反射模型的灵敏度如何。在一个真实系统中,这样的偏差肯定会发生。即使是光滑的镜面表面(理想的镜面反射),当雷达位于几倍天线直径大的该表面时,由物理光学原理即菲涅尔区,也需要校正。关键的问题是,在反射的雷达信号中有多少是未知量,要确定这些未知量,雷达需要测量的量是多少,很明显,在多路径效应下,未知数的数量会增加。雷达必须做更多的测量才能获得反射平面的信息以鉴别目标的真实仰角。但是更多的工作是需要找到最优的算法,需要确定它们对不同反射系数模型的灵敏度。
四旋翼直升机飞行控制系统设计
四旋翼直升机飞行控制系统设计 四旋翼直升机具有4个呈交叉结构排列的螺旋桨,其独特的构型能够满足复杂环境中的任务需求。文中设计了一种四旋翼直升机飞行控制系统软硬件方案,通过传感器实时采集四旋翼的姿态、高度、位置等信息,采用PID算法设计飞行控制律,以ARM Cortex—M3内核高性能单片机作为主控制器。最后采用CVI开发的地面站软件实现在线数据采集与调参,并通过实际飞行验证了本方案的可行性与稳定性。 四旋翼飞行器(Ouadrotor,Four-rotor,4rotors helicopter,X4-flver等)是一种特殊构型的电动可遥控微型飞行器,它是由4个螺旋桨驱动,通过4个螺旋桨的差速来完成姿态控制。四旋翼飞行器与其他类型的无人机相比具有许多优点,其中主要是其可垂直起降及机动性强等性能,能够适应各种复杂环境。因此四旋翼飞行器在民用产品、军事武器等各方面有着广泛的应用前景。文中将介绍四旋翼飞行器控制系统的软硬件设计方案与实现。 1飞行控制系统总体设计 四旋翼飞行器控制系统的设计主要包括主飞行控制板和相关外围电路,结合惯性传感器、超声波传感器、GPS接收机、无线数传模块,并配套自行开发的地面站软件设计实现一套完整的四旋翼飞行器自主飞行控制系统。 四旋翼飞行器飞行控制系统的开发内容主要包括:飞控板及外围电路设计,传感器底层驱动开发,PWM控制信号的混控输出,飞行控制律程序设计以及地面站软件的设计与开发。 飞控系统的总体设计方案如图1所示。系统核心控制器为一款基于ARM cortex—M3内核的单片机;惯性测量元件(IMU)主要提供解算飞行器姿态的数据等信息;高度传感器采用超声波传感器,输出相对地面的高度信息;接收机接收遥控器发出的杆量信号,这些信号将用于控制器的输入;GPS接收机输出飞行器的位置信息;无线数据传输模块用于飞行器与地面站的数据通信。传感器信息经过飞行控制律的运算处理,最终通过PWM信号输出至电子调速器,用来控制四个电机的转速,以实现姿态、位置与高度的控制。地面通过无线数传实时传回飞行器信息用以检测飞行器飞行状态,同时地面站也可以向飞行器发送控制指令。
我国空军装备的红外搜索与跟踪系系统
国产歼-11B型战斗机,座舱前圆形物即为机载红外搜索与跟踪系统-IRST 近日,俄罗斯媒体报道了乌拉尔光学仪器厂-UOMZ向我国出口机载前视红外搜索与跟踪系统-IRST的情况,根据UOMZ主页的介绍,该公司向我国出口的IRST有两种;用于苏-27SK的OEPS-27,用于苏-30MKK的OEPS-30I。 不过从这个介绍中并没有歼-10,而正在试飞的歼-10B已经配备了IRST,这表明我国自行研制的IRST已经进入装机试飞阶段,如果试验顺利的话,实现 国产IRST替代进口已经指日可待。
歼-10B已经配备国产IRST 我们知道现代作战飞机的主要探测系统是机载火控雷达,现代机载火控雷达具备可以全天候工作、探测距离远、可以多目标跟踪与攻击等优点,但其缺点就是需要主动发射电波,在电子战日益激烈的现代空战中容易暴露自己,同时系统体积和重量都偏大,特别是隐身飞机的出现,也让雷达的实际探测效果大打折扣,因此作战飞机需要新的探测手段,以做为雷达的补充,所以IRST就出现了,从该系统的名称就可以看出其是采用红外探测原理,利用目标与背影的温差来探测目标,与机载雷达相比,机载IRST最大的优点就是不发射电波,隐蔽性强,抗电磁干扰能力好,特别是对抗隐身飞机时有巨大的优势,因为当隐身飞机飞行时其机身蒙皮会与空气磨擦生热,速成越快,温度越高,因此IRST的探测距离就越远,另外其工作波长短,系统功耗、体积和重量较小,可靠性较高,成本低,是各国重点发展的一项探测技术,机载红外探测系统除了IRST还有机载前视红外搜索系统(FLIR),两者的区别主要是IRST主要用于对空中目标的探测,其器件工作在中波,而FLIR主要用于对地面目标的探测,器件工作在长波,当然红外探测系统也不是完美无缺,其缺点就是探测距离较近,尤其是目标处于迎头探测时,目前性能较好的IRST的这个指标也不过在100公里左右,而普通机载雷达就超过了这个指标,另外就是其不能直接测量目标的距离,仍旧需要雷达或者激光测距仪来辅助,因此用于火控或者制导的时候仍旧会暴露平台的位置,另外就是受自然环境干扰较大,特别是太阳直视时、不良气候条件下的作用距离仍 旧偏低。
雷达自动跟踪技术研究
31 自动跟踪 本章介绍了跟踪检测目标的技术。使用雷达硬件和雷达信号处理实现跟踪,从而形成一个闭环系统。单目标跟踪(STT)和边跟踪边扫描(TWS)模式(在第2章中介绍)被检验。在我们考虑跟踪测量和方法之前,我们需要定义一些术语。 估计,准确性和精确度通常用于描述跟踪的不同方面。估算应用于任何参数的值,该参数的值(1)仅在与腐蚀干扰相结合时才能测量,例如热噪声(图31-1);(2)不能直接测量,例如基于一系列距离测量的距离速率。 根据该定义,雷达系统测量或计算的每个参数,无论多么精确,都是估计值。 接下来,区分两个重要参数:准确度和精度。通常,两者都指数量的测量,其在跟踪中包括目标参数,例如真实范围,速度和方位。因此,测量值表示雷达系统对目标的真实参数的估计。 准确度表示测量值与真实值的接近程度,而精度表示在同一参数的多个测量值中存在多少可变性。它们共同构成了雷达系统对真实目标参数进行估算的基础。图31-2显示了一个示例,其中准确度和精度可以看作非常不同并且(有时)彼此独立。跟踪雷达的目标是具有高准确度和高精度。
跟踪中使用的另一个术语是判别式,其量化测量函数的校准。它通常由执行测量的硬件或软件输出与跟踪误差的真实值的关系图表示(图31-3)。曲线的线性部分的斜率是判别式并且确定测量的灵敏度。通常,斜率随着信噪比的增加而增加。 判别式的一个重要特征是它们通常是归一化的,因此无量纲。因此,不一定需要精确测量电压或功率电平。此外,除了信噪比的影响之外,跟踪误差的测量值不随信号强度而变化。它们与目标的大小,范围,机动和雷达截面(RCS)波动无关。如果需要,可以通过将判别式乘以预先计算的常数来给出判别式。在整个跟踪过程中使用判别式,其目的是改进目标测量参数的估计,例如距离,多普勒,仰角和方位角。 31.1 单目标跟踪 单目标跟踪可提供有关目标位置,速度和加速度的连续且准确的当
黑鹰直升机飞控系统及仿真
第二十四届(2008)全国直升机年会论文 黑鹰直升机飞控系统及仿真 郑文东陈仁良 (南京航空航天大学直升机旋翼动力学国家级重点实验室,南京210016) 摘要:黑鹰(UH-60)直升机作为通用战术直升机,其飞行控制系统中的混合器、平尾安 装角随飞行速度的变化等设计有特色。对我国直升机飞行控制系统的设计具有参考实用价 值。本文全面介绍了黑鹰直升机的飞行控制系统的组成、控制流程及功能,并应用simulink 对增稳系统进行了仿真实验。 关键词:直升机;飞行控制;稳定增稳;非线性;仿真 1 引言 由于直升机存在各个运动部件的气动耦合、惯性耦合、结构耦合及运动耦合,其操纵性、稳定性和机动性就变得很差。任何受扰运动都会使直升机显出极不稳定的特性,比如悬停和小速度时受扰运动的悬停振荡模态和前飞时受扰运动的纵向沉浮振荡模态都表明无飞控系统改善的直升机的操纵是很复杂的。因此,直升机必须加装飞控系统来改善其特性,改善直升机的操稳性能,减少各个运动部件的耦合,从而减轻驾驶工作负荷。黑鹰直升机作为通用战术直升机,其飞行控制系统中的混合器、平尾安装角随飞行速度的变化等设计有特色。对我国直升机飞行控制系统的设计具有参考实用价值。本文对黑鹰直升机飞控系统进行分析,并对小速度下的运动模态进行了simulink下的仿真。 2 黑鹰直升机飞控系统模型的组成 直升机模型的运动模态包括姿态运动和轨迹运动。一般意义上,飞控系统功能便是部分或全部完成姿态与轨迹控制,并且改善飞行品质。本文以黑鹰直升机飞控系统为例进行分析,该直升机除具有上述功能外,在设计上还有其自身的三个特点。偏差作动器作动器作为飞控系统中单独一个通道被分离出来便是其中的第一个特点,它的主要功能是解决黑鹰直升机前飞速度80knot至180knot下速度对迎角的静不稳定特性,低于80knot由水平安定面解决;第二个特点就是水平安定面随动设计,直升机速度低于80knot时,水平安定面与速度、俯仰角和总距等参数随动。除此之外,水平安定面在小速度爬升、巡航和自转下滑等运动下对迎角起到优化调节的作用,在自转下滑时平尾迎角为-6度,水平悬停下的平尾迎角为34度;第三个特点是混合器的设计,其功能是通过纯机械操纵进行解耦。下面就从组成黑鹰直升机飞控系统的各个部分进行介绍和分析。 图1给出了黑鹰直升机飞控系统结构示意图,包括内回路、外回路、偏差作动器和
直升机控制系统实验报告
直升机控制系统课程 报告 学号:031710426 姓名:王瑞 时间:2020年4月29日
目录 直升机控制系统课程报告 (1) 一、主旋翼挥舞运动分析 (2) (一)垂直飞行的均匀挥舞 (2) (二)前飞时的周期挥舞 (2) (三)旋翼偏倒原因 (3) 二、画出俯仰通道的开环结构 (3) 三、开环模态分析 (4) 四、直升机增稳系统设计 (6) (一)增稳系统性能指标 (6) (二)增稳系统优化过程 (7) 五、实验感想 (10) 1.实验中存在的缺陷 (10) 2.实验收获 (10)
一、主旋翼挥舞运动分析 直升机属于旋翼飞行器,其中主旋翼作为一个单独的系统是直升机中最重要的组成部分,它肩负着直升机飞行时的推进、负重和操控三种功能。直升机主要产生向上的拉力克服重力,产生向前的水平分力使直升机前进,产生其他分力及力矩使直升机保持平衡或做机动飞行,若直升机在空中发生事故停车,可以及时操控旋翼,使其自传产生缓冲升力,保证安全着陆。 旋翼系统主要由桨叶和桨毂组成,桨毂包含水平、垂直和轴向三个铰,水平较、摆振铰以及变距铰使旋翼的关键部件,其中桨叶的挥舞运动主要是由垂直铰控制。直升机在前飞时,桨叶重心距旋翼轴的距离不断变化,一起周期交变的科里奥利力。经研究表明,科里奥利力的最大值高达桨叶自重的7倍伊桑,巨大的科里奥利力会造成巨大的交变弯矩。有了垂直铰,桨叶绕垂直铰摆动一个角度,从而使桨叶根部所受的交变弯矩大大较小。 下面主要分析桨叶的挥舞运动。 (一)垂直飞行的均匀挥舞 直升机在悬停或者定长垂直飞行时,桨叶会形成一个倒置的圆锥,圆锥的椎体周与旋转轴重合。 直升机悬停或垂直飞行时作用在桨叶上的力有气动合力jy F ,水平向外的离心力c F ,力图拉平桨叶,还有桨叶重力jy G 。当浆页上翘挥舞角β时,水平铰受到的力矩之和为0。又因为直升机在垂直飞行时相对气流是对称的,桨叶旋转过程中,气动力和离心力均不变,此时挥舞角β等于锥角0a ,即均匀挥舞。 (二)前飞时的周期挥舞 直升机前飞时,桨叶旋转形成的倒锥体的锥体轴相对于旋翼的旋转轴出现后倒现象。此时桨尖平面D D -相对构造平面S S -也后倒1a 。因此在方位角?=0ψ处,挥舞角10-a a =β,?=180ψ处,挥舞角10a a +=β。 出现侧倒角1b ,对于左旋直升机来说,?=90ψ处,10-b a =β,?=270ψ处,10b a +=β,旋翼向左侧偏倒。 由此可见,直升机在前飞的时候,桨叶既后倒又左侧倒,在左后方的某个方位角处,挥舞角最低,出现min β,在右前方的某个方位角处,挥舞角最大,出现max β。
Airbus飞控系统的自动控制文献综述
通过管线不仅可以解决吊顶层配置不规范高中资料试卷问题,而且对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行 高中资料试卷调整试验;通电检查所有设备高中资料试卷相互作用与相互关系,根据生产工艺高中资料试卷要求,对电气设备进行空载与带负荷下高电力保护装置调试技术,电力保护高中资料试卷配置技术是指机组在进行继电保护高中资料试卷总
、管路敷设技术程中,要加强看护关于管路高中资料试卷连接管口处理高中资料试卷弯扁度固定盒位置保护层防腐跨接地线弯曲半径标高等,要求技术交底。管线敷设技术包含线槽、管架等多项方式,为解决高中语文电气课件中管壁薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处理;同一线槽内,强电回路须同时切断习题电源,线缆敷设完毕,要进行检查和检测处理。、电气课件中调试正常工况下与过度工作下都可以正常工作;对于继电保护进行整核对定值,审核与校对图纸,编写复杂设备与装置高中资料试卷调试方案,编写重要设备高中资料试卷试验方案以及系统启动方案;对整套启动过程中高中资料试卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要在事前掌握图纸资料、设备制造厂家出具高中资料试卷试验报告与相关技术资料,并且了解现场设备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。 、电气设备调试高中资料试卷技术资料试卷安全,并且尽可能地缩小故障高中资料试卷破坏范围,或者对某些异常高中资料试卷工况进行自动处理,尤其要避免错误高中资料试卷保护装置动作,并且拒绝动作,来避免不必要高中资料试卷突然停机。因此,电力高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器组在发生内部故障时,需要进行外部电源高中资料试卷切除从而采用高中资料试卷主要保护装置。
红外搜索跟踪系统 (1)
红外搜索跟踪系统 摘要: 首先指出红外搜索跟踪系统的在军事应用的优势和意义,介绍了红外搜索跟踪系统的主要组成部分及工作原理,然后对近年来研制的红外搜索跟踪系统进行了综述,并对系统的发展趋势进行了展望。 关键词: 红外搜索跟踪系统; 组成; 原理; 现状及发展趋势 前言:红外搜索与跟踪(IRST)系统是基于红外特征全景监视设备,能够探测和跟踪低高度空中和水面威胁目标,如入侵的反舰导弹,当雷达性能下降时成为一种重要的雷达辅助设备。IRST系统对近程监视、舰船识别、海岸成像和夜间导航都发挥很好的作用。 红外搜索系统的总体 1.1红外搜索跟踪系统组成 红外搜索跟踪系统一般由红外扫描头(红外传感器和扫描单元),信号处理装置,稳定平台,测角系统,导航单元,电源单元,随动伺服系统和显控台等组成。 1.1.1红外扫描头 红外扫描头安装在稳定平台上,一般都装载坦克,装甲车,舰艇及飞机的外部,以接受目标的红外辐射,在俯仰位伺服单元和方位伺服单元的驱动下,实现在不同俯仰角上的连续回转水平扫描。 1.1.2信号处理装置 信号处理装置通常包括实时处理和便扫描边跟踪两部分。边扫描边跟踪红外扫描头传来的目标数据,完成目标提取,产生跟踪目标,将数据传输到武器系统。同时对跟踪目标进行识别和相关处理。 1.1.3稳定平台 稳定平台的主要作用是敏感并消除,隔离承载体的摇摆,晃动,使承载的红外扫描头稳定在地理水平面。 1.2系统工作原理 红外系统中,红外传感器起着关键作用,能将红外光谱区物体的亮度分布转化为可见光的亮度分布,并显示在显示屏上,便于观测和识别。红外搜索系统的一般工作原理是将来自目标和背景的红外辐射通过红外光学成像系统聚集于红外探
跟踪雷达基础知识讲义
18.5 目标捕获和距离跟踪 距离跟踪就是连续测量从发射射频脉冲到目标回波信号返回之间的延时的过程。距离测量是雷达最精确的位置坐标测量。其典型数据是在测量几百英里距离时精密到几码以内。通常距离跟踪是从其他目标中鉴别出所需目标的主要方法,通过距离波门(即时间选通)从误差检波器输出中消除其他目标的回波(虽然也有用速度鉴别和角度鉴别的)。距离跟踪电路也可用来捕获所希望的目标。距离跟踪不仅必须测量脉冲从雷达到目标的往返行程时间,而且必须识别出反射信号是一目标而不是噪声,并且保存目标的距离随时间变化的历程。 这里的讨论适用于典型的脉冲跟踪雷达。距离测量也可以用使用调频连续波的连续波雷达来完成,这种调频连续波通常是一种线性调频波。目标距离由回波信号和发射信号之间的频率差异决定。考虑到多普勒效应的调频连续波系统的性能见参考资料1。 捕获 距离跟踪的第一个作用是捕获所需的目标。虽然这不是跟踪工作,但在典型的雷达里这是实现距离跟踪或角跟踪之前必需的第一步。对于窄波束跟踪雷达而言,为使天线波束指向目标的方向,必须具备有关目标角位置的某些信息。这个信息叫做引导数据,可以由搜索雷达或其他来源提供。引导数据可以足够精确地把窄波束指向目标或者可以要求跟踪器扫描一个较大的不确定区域。雷达距离跟踪的优点是能看到从近距离一直到雷达的最大距离上的所有目标。通常把这个距离分成小段,其中各段可以同时检验是否有目标存在。当需要波束扫描时,距离跟踪器可在短时间里(如0.1s)检验各段情况,即可作出关于目标是否存在的判断。如果没有目标存在,就让波束移向新的位置。这个过程对机械式跟踪而言是完全连续的,因为机械式跟踪移动波束相当慢,因此使得在对各段距离进行检验的短时间内目标仍然留在波束宽度之内。 与搜索雷达一样,目标捕获要考虑实现给定的检测概率和虚警概率所需的信噪比门限和积累时间[1]。然而,与搜索雷达相比,目标捕获可使用较高的虚警概率,这是因为操纵员知道目标是存在的,不存在在等待目标时由于虚警而使操纵员疲劳。最佳虚警概率的选择是以电路的性能为基础的,此电路可观察各距离间隔以判断哪一个间隔中有目标回波。 其典型的技术是使门限电压足够高,以防止大多数噪声尖峰超过门限,可是又要低得足以让弱信号通过。在各个发射脉冲之后即可观察所检验的距离间隔是否有信号超过了门限。积累时间允许雷达在判决是否有目标存在之前进行几次这种观察。噪声和目标之间的主要区别在于超过门限的噪声尖峰是随机的,但如果有目标存在,则当它超过门限时就比较有规律。一种典型的系统就可简单地计算在积累时间内超过门限的次数,并在超过的次数大于雷达发射次数的一半时,就指出是否有目标出现。若雷达脉冲重复频率是300 Hz,积累时间是0.1s,则在有一个强而稳定的目标时,雷达就能观察到30次超过门限。由于从弱目标来的回波加上噪声不一定总是超过门限,所以可以规定一个界限,如15次,在积累时间里,必须超过这一界限才判定有目标出现。对于非闪烁目标,预期的性能为:在信噪比为2.5dB时,发现概率是90%,虚警率是10-5。AN/FPS—16和AN/FPQ—6测量雷达均使用这些检测参数,每次捕获可使用10个邻接的波门,每个波门宽为1000yd。这10个波门覆盖了5n mile的距离间隔。
直升机操控系统飞控原理简介
直升机操控系统飞控原理简介 作为一种特殊的飞行器,直升机的升力和推力均通过螺旋 桨的旋转获得,这就决定了其动力和操作系统必然与各类固定机翼飞 机有所不同。一般固定翼飞机的飞行原理从根本上说是对各部位机翼 的状态进行调节,在机身周围制造气压差而完成各类飞行动作, 并且 其发动机只能提供向前的推力。但直升机的主副螺旋桨可在水平和垂 直方向上对机身提供动力,这使其不需要普通飞机那样的巨大机翼, 二者的区别可以说是显而易见。 操纵系统 直升机的操纵系统可分为三大部分: 踏板在直升机驾驶席的下方通常设有两块踏板,驾驶员可以 通过它赴* 向時推 ||陀輩*转血 通过周期杆使机捧的方向找宗改变 J
们对尾螺旋桨的输出功率和桨叶的倾角进行调节,这两项调整能够对机头的水平方向产生影响。 周期变距杆位于驾驶席的中前方,该手柄的控制对象为主螺 旋桨下方自动倾斜器的不动环。不动环可对主螺旋桨的旋转倾角进行调整,决定机身的飞行方向。 总距杆位于驾驶席的左侧,该手柄的控制对象为主螺旋桨下 方自动倾斜器的动环。动环通过对主螺旋桨的桨叶倾角进行调节来对调整动力的大小。另外,贝尔公司生产的系列直升机在总距杆上还集成有主发动机功率控制器,该控制器可根据主螺旋桨桨叶的旋转倾角自动对主发动机的输出功率进行调整。 飞行操作 升降有些读者可能会认为,直升机在垂直方向上的升降是通过改变主螺旋桨的转速来实现的。诚然,改变主螺旋桨的转速也不失为实现机体升降的方法之一,但直升机设计师们很早之前便发现,提升主螺旋桨输出功率会导致机身整体负荷加大。所以,目前流行的方法是在保持主螺旋桨转速一定的情况下依靠改变主螺旋桨桨叶的倾角来调整机身升力的大小。驾驶员可通过总距杆完成这项操作。当把总距杆向上提时,主螺旋桨的桨叶倾角增大,直升机上升;反之,直升机下降。需要保持当前高度时,一般将总距杆置于中间位置。 平移直升机最大飞行优势之一是:可以在不改变机首方向的 情况下,随时向各个方向平移。这种移动是通过改变主螺旋桨的旋转 倾角来实现的。当驾驶员向各个方向扳动周期变距杆时,主螺旋桨的主轴
H∞回路成形法设计直升机飞控系统
第24卷第7期计算机仿真2007年7月文章编号:1006-9348(2007)07-0062—03 H∞回路成形法设计直升机飞控系统 朱华,杨一栋 (南京航空航天大学301教研室,江苏南京210016) 摘要:直升机飞控系统幅频特性应低频高增益,高频低增益,尽可能提高带宽,以适应全包线机动飞行,优良动态跟踪及通道解耦等要求。用回路成形法结合经典控制理论,通过选取恰当的权阵和,而后用优化得到控制器,给出了直升机飞控系统内 回路工程设计的具体策略。并指出了回路成形设计中的抗积分卷绕实施途径。对所给出的设计策略的有效性均辅以仿真验证。在成功的内回路设计基础上,可简便地单独设计外回路各通道。 关键词:直升机;飞行控制;回路成形;反卷绕 中图分类号:TJ765.2文献标识码:A DesignofHelicopterFlightControlSystemUsing H。LoopShaping ZHUHua.YANGYi—dong (Faculty301,NanjingUniversityofAeronauticsandAstronautics,NanjingJinagsu210016,China)ABSTRACT:Astheflightcontrolsystemsofhelicoptersshouldhavehighgainsatlowfrequencyandlowgainsathighfrequency,andthebandwidthshouldbeashighaspossibletoobtainsatisfactorycapability androbustness,andaffterproperlyslectingW1and%,thispaperdesignsinner—loopcontrollersK。foranhelicopterflightcontrolsystembythemethodofH。loopshaping.Additonally,ananti—winduploopisaffiliatedfortheintegraleffectoftheweighW1andthesaturationofactuators.Finally,controllersareexaminedthroughsimulation.Theatrategygiveninthepa—per hasprovidedafundationfordesigningout—loopcontrollersofhelicopters.. KEYWORI)S:Helicopter;Fightcontrol;Loopshaping;Anti—windup 1引言 直升机各通道间耦合严重,因此内回路设计的重点是本 通道跟踪,外通道解耦。目前解耦的方法很多,有利用通道 间交联解耦,也有利用系统状态反馈或输出反馈,加上前馈 补偿解耦。但这些方法都有明显的缺陷,即都需要模型非常 精确,设计出的系统鲁棒性差,且设计过程复杂。因此有必要寻找一种新的解决方法。 H。回路成形是由MeFarlane和Glover提出的¨J、忙1,它是将经典控制理论与现代鲁棒优化控制相结合,进行控制系统设计的一种方法。为将该方法应用于直升机飞控系统的工程设计,对H。回路成形设计策略作如下描述。 设系统的控制对象为G阵,设计者应首先选择形,和职两加权阵,对G的开环奇异值进行成形,使成形后的开环系统为e=职GWl。其中髟在前向通道中,一般为比例+积分环节。积分用于提高低频增益,有利于稳态跟踪及通道间解耦。积分的引入还可进行自动配平。比例+积分的引入所 收稿日期:2006—06—05修回日期:2006—06—14 —62一 图1H。回路成形的标准方块图 构成的5域中的零点,有利于减少截止频率处的相位迟后。职在反馈通道中,为抑制飞行传感器的噪声,故一般采用低通滤波器形式。为了通道间的解耦,肜,和耽均为对角阵。在反馈通道中需设计日。控制器K。,使[d。,d2]7到匕,=:]7传递函数阵的日。范数的倒数达到最大,即 溅㈦一圳|-1 由上式可知,对d,一z。,∈最大,即扰动到误差传递函数阵的H。范数最小,可使扰动下的系统误差达到最小,即系统有良好的干扰抑制能力;而对d2一::,∈最大,则控制信 万方数据万方数据
基于卡尔曼滤波器的雷达目标跟踪
随机数字信号处理期末大作业(报告) 基于卡尔曼滤波器的雷达目标跟踪 Radar target tracking based on Kalman filter 学院(系):创新实验学院 专业:信息与通信工程 学生姓名:李润顺 学号:21424011 任课教师:殷福亮 完成日期:2015年7月14日 大连理工大学 Dalian University of Technology
摘要 雷达目标跟踪环节的性能直接决定雷达系统的安全效能。由于卡尔曼滤波器在状态估计与预测方面具有强大的性能,因此在目标跟踪领域有广泛应用,同时也是是现阶段雷达中最常用的跟踪算法。本文先介绍了雷达目标跟踪的应用背景以及研究现状,然后在介绍卡尔曼滤波算法和分析卡尔曼滤波器性能的基础上,将其应用于雷达目标跟踪,雷达在搜索到目标并记录目标的位置数据,对测量到的目标位置数据(称为点迹)进行处理,自动形成航迹,并对目标在下一时刻的位置进行预测。最后对在一个假设的情境给出基于卡尔曼滤波的雷达目标跟踪算法对单个目标航迹进行预测的MATLAB仿真,对实验的效果进行评估,分析预测误差。 关键词:卡尔曼滤波器;雷达目标跟踪;航迹预测;预测误差;MATLAB仿真
1 引言 1.1 研究背景及意义 雷达目标跟踪是整个雷达系统中一个非常关键的环节。跟踪的任务是通过相关和滤波处理建立目标的运动轨迹。雷达系统根据在建立目标轨迹过程中对目标运动状态所作的估计和预测,评估船舶航行的安全态势和机动试操船的安全效果。因此,雷达跟踪环节工作性能的优劣直接影响到雷达系统的安全效能[1]。 鉴于目标跟踪在增进雷达效能中的重要作用,各国在军用和民用等领域中一直非常重视发展这一雷达技术。机动目标跟踪理论有了很大的发展,尤其是在跟踪算法的研究上,理论更是日趋成熟。在跟踪算法中,主要有线性自回归滤波、两点外推滤波、维纳 α-滤波和卡尔曼滤波,其中卡尔曼滤波算法在目标跟踪滤波、加权最小二乘滤波、β 理论中占据了主导地位。 雷达跟踪需要处理的信息种类多种多样。除了目标的位置信息外,一般还要对目标运动速度进行估计,个别领域中的雷达还要对目标运动姿态进行跟踪。雷达跟踪的收敛速度、滤波精度和跟踪稳定度等是评估雷达跟踪性能的重要参数。因此提高雷达跟踪的精度、收敛速度和稳定度也就一直是改善雷达跟踪性能的重点。随着科技的发展,各类目标的运动性能和材质特征有了大幅度的改善和改变,这就要求雷达跟踪能力要适应目标特性的这种变化。在不断提高雷达跟踪性能的前提下,降低雷达跟踪系统的成本也是现代雷达必须考虑的问题。特别是在民用领域中由于雷达造价不能过高,对目标跟踪进行快收敛性、高精度和高稳定性的改良在硬件上是受到一些制约的,因此雷达跟踪算法的研究就越来越引起学者们的关注。通过跟踪算法的改进来提高雷达的跟踪性能还有相当大的挖掘潜力。考虑到雷达设备的造价,民用雷达的跟踪系统首要的方法就是对于雷达的跟踪算法进行开发。