驾驶认知行为建模
机动车安全驾驶行为要求
机动车安全驾驶行为要求 ----WORD文档,下载后可编辑修改---- 下面是小编收集整理的范本,欢迎您借鉴参考阅读和下载,侵删。您的努力学习是为了更美好的未来! 机动车安全驾驶行为要求: 1、严格遵守道路交通安全法,服从交通警察的指挥,讲究交通公德和职业道德,文明驾驶,礼貌行车。 2、驾驶车辆时,要随身携带驾驶证和行车执照,以及其他的相关证件;不准驾驶与准驾车种不符的车辆,严禁将车辆交给非驾驶人驾驶。 3、坚持对车辆进行经常性检查,安全设备应齐全有效,保持车容整洁;不准驾驶机件失灵以及违章乘载的车辆。 4、严禁在车门、车厢没有关好时行车。 5、驾驶车辆时要精力集中,谨慎驾驶,不得超速行驶,不得强行超车,不准闯禁行线。 6、严禁酒后驾车。 7、驾驶车辆时,严禁拨打、接听手持电话,严禁有观看影视录像等妨碍安全驾驶的行为。 8、途经路口、人行横道、学校、公交车站或人多的繁华地段,要减速慢行,注意避让行人、非机动车,保证行车安全。 9、严禁下陡坡时熄火或者空档滑行。
10、安全礼让礼宾车队,严禁穿插。 11、严禁在禁止鸣喇叭的区域或者路段鸣喇叭。 12、严禁向道路上抛撒物品,严禁在机动车驾驶室的前后窗范围内悬挂、放置妨碍驾驶人视线的物品。 13、机动车驾驶人应当注意休息,严禁疲劳驾驶。一般情况下,连续驾驶2h停车休息20min;连续驾驶超过2h,至少停车休息1h; 24h 内累计驾驶时间不得超过h;机动车驾驶人每天连续睡眠时间不得少于6h0 14、车辆停放要遵守车辆停放规定,严禁乱停乱放;停放车辆时要关闭电源,拉紧驻车制动拉杆,锁好车门。 15、行车中一旦发生事故,要积极抢救伤者,保护现场,及时报警。 任何一个拥有正常交通活动权利的参与者,在参与交通活动中,既享有与交通活动相关的特定权利,同时也必须承担相应的义务。权利与义务是相伴而生、相互制约和相互促进的,不可偏置,即不可只重视权利而轻视义务。 机动车安全开车技巧: 1、上车先看车 上车前绕车转一圈,看车的外况、轮胎、车底下有没有漏油漏水。一个星期还得揭开盖子检查一次机油、冷却水、刹车油。 2、点火步骤
安全驾驶行为
安全驾驶行为(138题) 3.4.1 选择题:(64题) 3.4.1.1 行车中需要借道绕过前方障碍物,但对向来车已接近障碍物时,应当。 A.降低速度或停车,让对向来车优先通行 B.加速提前抢过 C.鸣喇叭示意对向车辆让道 D.迅速占用车道,迫使对向来车停车让道 答案:A 3.4.1.2 行车中变更车道,开启转向灯。 A.应提前1秒钟 B.应至少提前3秒钟,提醒后方来车注意 C.不需要提前 D.根据情况决定是否 答案:B 3.4.1.3 驾驶车辆在交叉路口前变更车道时,应驶入要变更的车道。 A.在路口前实线区内根据需要 B.进入路口实线区内 C.在虚线区按导向箭头指示 D.在路口停止线前 答案:C 3.4.1.4 驾驶车辆向左变更车道时,应提前,在不影响其他车辆正常行驶的前提下,驶入 左侧车道。 A.开启危险报警闪光灯 B.开启右转向灯 C.伸手示意 D.开启左转向灯 答案:D 3.4.1.5 驾驶车辆汇入主干道车流时,应提前开启转向灯,。 A.不用观察,直接汇入车流 B.强行汇入车流 C.仔细观察,确认安全后汇入车流 D.加速汇入,连续变更车道 答案:C 3.4.1.6 车辆驶近人行横道时,应当。 A.加速通过 B.立即停车 C.鸣喇叭示意行人让道 D.先注意观察行人、非机动车动态,再通过 答案:D 3.4.1.7 车辆临时靠边停车后准备起步时,应先。 A.挂起步挡 B.鸣喇叭 C.观察周围交通情况
D.提高发动机转速 答案:C 3.4.1.8 行驶车道绿色箭头灯亮时,但车辆前方人行横道仍有行人行走,应。 A.直接起步通过 B.起步后从行人后方绕过 C.起步后从行人前方绕过 D.等行人通过后再起步 答案:D 3.4.1.9 车辆起步后发现后方超越车辆较多时,应。 A.伸手示意后车让行 B.加速驶入车行道 C.向左转向直接驶入车行道 D.沿行进方向缓行,等待时机驶入车行道 答案:D 3.4.1.10 在一般道路倒车时,若发现有过往车辆通过,应。 A.继续倒车 B.鸣喇叭示意 C.主动停车避让 D.加速倒车 答案:C 3.4.1.11 在一般道路上因掉头需要倒车时,应选择在的地段进行。 A.交通繁忙 B.路面狭窄 C.非机动车和行人较多 D.不影响正常交通 答案:D 3.4.1.12 会车前选择的交会位置不理想时,应立即。 A.加速选择理想位置 B.减速,低速会车或停车让行 C.向左占道,让对方减速让行 D.打开前照灯,示意对方停车让行 答案:B 3.4.1.13 进入左侧道路超车,无法保证与正常行驶前车的横向安全间距时,应。 A.加速超越 B.并行一段距离后再超越 C.放弃超车 D.谨慎超越 答案:C 3.4.1.14 在没有中心线的道路上超车时,应开启左转向灯,超越。 A.借人行道 B.鸣喇叭后迅速从两侧 C.从被超车右侧 D.从被超车左侧 答案:D
面向汽车主动安全驾驶的行为研究
面向汽车主动安全驾驶的行为研究 摘要:本文第一部分简单阐述了人的行为与人的驾驶行为;第二部分在第一部分的基础上探讨分析了建立面向汽车主动安全的环境模型;最后对建立的矩阵状态和信号状态之间的权重关系进行计算以得出权重值的大小来判断驾驶员的行为意图。 关键词:汽车;主动安全;驾驶行为;研究 1.驾驶行为 1.1人的一般行为模式 现代心理学把人类行为定义为感知、思考和意愿。因此,光线的能够感知与否和分析一件事情之后所作出的具体决定都是人的行为范畴。而在某些事件中人的情绪和欲望也属于是人的行为范畴。在人??将个体行为放在集体活动的背景中时,个人行为活动就受到了集体活动的限制。行为是人是在特定环境下发生的有意识活动。 哲学家把人们的行为能力分成三类,即意志、理解、个体活动,但一直存在争议。现代的心理学者也以行为三本能系统为研究基础。如驾驶员在匆忙情况下和速度的控制,一定的刺激会引发人的行为需要,行为需要与诱因相结合形成人的行为动机,行为动机最终促发人的具体行为实施。
1.2驾驶行为 驾驶员在驾车行驶中对交通信息进行分析时,要做到及时准确。在这种情况下驾驶员往往要在很短的时间内进行分析与判断,并采取措施。这就要求驾驶人员对信息的获取具有一定接受能力,如感觉,思维方面。当今越来越多得学者们采用计算机信息处理的方法对车辆行驶过程中驾驶员的操 作行为进行研究。影响车辆安全行驶的因素有路况因素、行车因素和周围其它车辆因素。当这些信息被驾驶员获取后进行分析并做出相应的决策。车辆在行驶状态中,操作人员主要依靠以往的驾驶经验以及外部一些环境影响因素来对行 驶状态的车辆进行控制,同时对行驶状态的车辆方向变化情况分析并呈现出来,这些信息参数将影响车辆操作人员的下一步驾驶行为。 2.汽车主动安全驾驶行为模型研究 2.1建模方法 建模过程应根据具体研究的要求,要有重点研究对象。在研究原型中包含多种元素的情况下,研究的内容也有所不同。要举一反三,建立一个原型,从不同的侧面建立多个模型进行研究的方法。建模过程中有定量的模型建立法和定性的模型建立法两种。定性的模型建立方法运用比较广泛,一般依据以下步骤进行建模:(1)建立模型的目的要明确;(2)对模型的原型要进行仔细的定量分析研究,获取相关的信息数据;
驾驶员行车安全管理规定
驾驶员行车安全管理规定 为尽量避免道路交通事故的发生,确保公司营运安全正常有序的开展,保障人民群众生命、财产安全,根据《中华人民国道路交通安全法》及《省道路交通安全实施办法》,结合我司实际,特制定此规定。 一、出车前检查,发现问题如不能自行解决的请及时报修。 1、检查车辆外观有无破损。 2、检查轮胎气压是否正常。 3、检查车扶手、拉环、座椅有无松动。 4、检查车安全锤、灭火器是否齐全有效。 5、检查方向有无松旷,行车制动、驻车制动是否有效。 6、检查仪表各项显示是否正常。 7、检查门泵开闭是否有效,有无漏气现象。 8、检查灯光、雨刮器、外后视镜是否齐全有效。 9、检查车载监控器、GPS系统是否齐全有效。 二、行车中的注意事项,必须严格遵守道路交通安全法及公司相关规定。 10、车辆行驶中,必须严格按照道路交通标志、标线、标速行驶,最高车速不得超过50公里/小时。 11、车辆行驶中,严禁熄火、空挡滑行。 12、在划有双向四车道或六车道上,车辆必须在右侧(慢)车道上行驶,严禁在左侧(靠近中心线的快车道)车道行驶,严禁连续变更两条以上车道行驶。 13、在划有公交专用和优先车道的道路上,必须在车道行驶。 14、车辆行经有交通信号灯的路口时,应在导向车道等候信号灯,严禁穿插、占道、闯红灯和黄色闪烁信号灯。 15、严禁压、越道路中心实线强行超车或行驶,严禁超越同线前车。 16、车辆调头或者左转弯时应当提前进入导向车道或者提前100米至50米处驶入最左侧车道。 17、车辆在道路上行驶,遇行人、非机动车横穿道路应当减速让行;遇行人行经人行横道必须停车让行。 18、车辆进站必须提前100米至50米减速至20公里/小时,同时开启右转向灯。 19、车辆进站必须按顺行方向单排停靠,严禁向右插队进站。 20、车辆进站停靠,前头于站牌平齐,右侧距道路边缘不得超过30厘米。 21、车辆出站必须开启左转向灯,并依次按顺序出站,严禁向左强行甩头出站。 22、车辆在站上下客必须停稳,拉好驻车制动后方可开门上下客,严禁从后门上客,前门下客(高峰期:上午7时至8时,下午5时至6时除外)
【CN109910901A】一种具有驾驶员行为分析监测功能的智能辅助驾驶系统【专利】
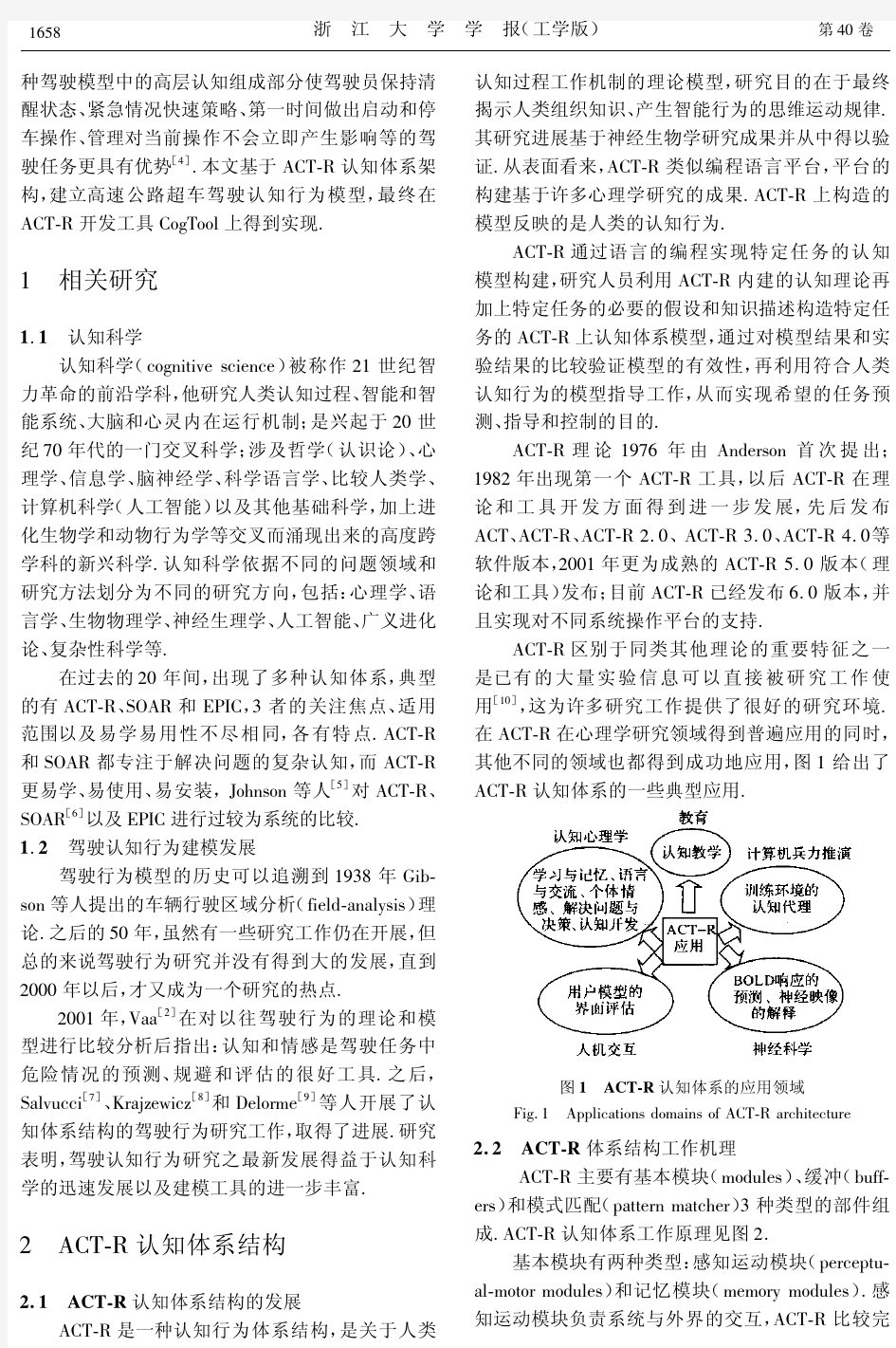
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910115450.8 (22)申请日 2019.02.15 (71)申请人 苏州工业园区职业技术学院 地址 215000 江苏省苏州市工业园区独墅 湖高等教育区若水路1号 (72)发明人 陈跃 (74)专利代理机构 苏州广正知识产权代理有限 公司 32234 代理人 孙茂义 (51)Int.Cl. B60W 40/09(2012.01) (54)发明名称 一种具有驾驶员行为分析监测功能的智能 辅助驾驶系统 (57)摘要 本发明公开了一种具有驾驶员行为分析监 测功能的智能辅助驾驶系统,包括:驾驶员动作 捕捉模块、汽车行驶状态采集模块、驾驶行为分 析控制模块、驾驶行为反馈模块。通过上述方式, 本发明一种具有驾驶员行为分析监测功能的智 能辅助驾驶系统,可以准确、快速的对驾驶员行 为和汽车行驶状态进行判断,及时的控制和提醒 驾驶员,防止出现意外, 提高安全性能。权利要求书1页 说明书3页 附图1页CN 109910901 A 2019.06.21 C N 109910901 A
权 利 要 求 书1/1页CN 109910901 A 1.一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,包括:驾驶员动作捕捉模块、汽车行驶状态采集模块、驾驶行为分析控制模块、驾驶行为反馈模块,所述驾驶员动作捕捉模块:用于捕捉和获取驾驶员在开车过程中的动作; 所述汽车行驶状态采集模块:用于获取在行驶过程中的汽车行驶状态信息和周边路况信息; 所述驾驶行为分析控制模块:根据获取到的驾驶员工作信息、在行驶过程中的汽车行驶状态信息和周边路况信息,判断对应时段内驾驶员行为是否存在异常,并根据判断结果对汽车进行干预控制; 所述驾驶行为反馈模块:根据用户提供的查询条件生成对应的驾驶行为反馈报告。 2.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述驾驶员动作捕捉模块包括动作获取模块、人脸识别模块、身体指数检测模块和空气检测模块。 3.根据权利要求2所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述动作采集模块包括手部动作获取模块、眼部动作获取模块、头部动作获取模块、脚部动作获取模块、嘴部动作获取模块。 4.根据权利要求2所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述身体指数检测模块包括脉搏监测模块、心率监测模块、呼吸监测模块。 5.根据权利要求2所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述空气检测模块包括酒精检测模块、毒气检测模块。 6.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述汽车行驶状态采集模块包括汽车运动监测模块、驾驶时长监测模块、驾驶速度监测模块。 7.根据权利要求6所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述汽车运动监测模块包括直线状态监测模块、转弯状态监测模块、超车状态监测模块、变道状态监测模。 8.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述驾驶行为分析控制模块包括判断信息设置模块、分析信息获取模块、行驶路况信息获取模块、驾驶员行为判断模块、驾驶干预控制模块,所述分析信息获取模块获取所述驾驶员动作捕捉模块、所述汽车行驶状态采集模块中的信息,并将信息传输至驾驶员行为判断模块,所述驾驶干预控制模块根据驾驶员行为判断模块的判断结果,对驾驶员进行提醒并对汽车进行制动控制。 9.根据权利要求8所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述行驶路况信息包括路面信息、位置信息、天气信息、路况信息。 10.根据权利要求1所述的一种具有驾驶员行为分析监测功能的智能辅助驾驶系统,其特征在于,所述驾驶行为反馈模块包括查询条件提取模块、查询信息检索模块、查询报告生成模块。 2
驾驶员不安全行为控制正式版
Through the reasonable organization of the production process, effective use of production resources to carry out production activities, to achieve the desired goal. 驾驶员不安全行为控制正 式版
驾驶员不安全行为控制正式版 下载提示:此安全管理资料适用于生产计划、生产组织以及生产控制环境中,通过合理组织生产过程,有效利用生产资源,经济合理地进行生产活动,以达到预期的生产目标和实现管理工作结果的把控。文档可以直接使用,也可根据实际需要修订后使用。 大量的不安全驾驶行为是造成道路交通安全事故的重要原因,本文在分析驾驶员不安全行为的基础上,从驾驶员不安全行为的控制技术运用角度入手,就提高驾驶员安全意识、技能和加强外部监督管理两个方面进行了初步的探讨。 目前我国机动车保有量达1.85亿辆,驾驶人超过2亿人。庞大的驾驶族群,不安全的驾驶行为导致交通事故频发,伤亡惨重。美国对7万5000件伤亡事故的统计表明,由人的不安全行为所导致的事故占88%,国内外的研究资料也表明,由驾驶员
直接责任造成的交通事故占事故总数的70%~90%。因此怎样有效控制驾驶员不安全驾驶行为,有效降低事故发生的概率,最大限度地减少交通事故,达到安全行驶的目的,是进一步落实道路运输企业安全生产主体责任的重要工作,也是交通运输管理部门的监管重点。 不安全行为的现象及成因 驾驶员不安全行为主要有超速、超载、超时疲劳驾驶;弯道行驶占线、超速、不鸣笛;违章超车;越线占道行驶;逆向行驶;高速公路不按规定车道行驶、不按规定停放车辆、上下旅客;酒后驾驶;行驶中接、打手机或与人交谈;行驶中抽烟、捡拾物品;穿拖鞋驾驶;视力不
驾驶行为预研报告
驾驶行为预研报告 人工智能-于海悦 2018年5月3日 1.驾驶行为分析: 驾驶行为的分析和研究,通常是作为其他车内应用的支撑技术而存在的。例如车道偏离预警(1ane departure warning,LDW)、车道保持(1ane keeping,LKS)、巡航控制系统(adaptive cruise control,ACC),都使用了相关的技术。 模型或理论: 1938年:安全行驶区域理论 1964年:紧张或焦虑状况下自调整驾驶模型 1974年:零危险模型 1977年:主被动安全模型 1980年:推理行为理论 1982年:危险自平衡理论 1983年:人行为能力模型 1984年:威胁规避模型 1985年:规划行为理论 1988年:阶梯型危险模型 1988年:激励建模方法 1989年:生成规则模型/基于规则模型 1992年:内模型 2000年:任务容量界面模型 1)驾驶员外部特性按照研究对象的不同,可以分为两类:针对特定信号的研究、以及针对特定场景的研究。针对特定信号的研究,主要是通过分析某一传感器所获得数据,进而研究与其相关联的特定驾驶行为。例如,通过分析方向盘夹角和刹车,判断驾驶员注意力是否集中、是否醉酒;通过分析眼睛注视位置,判断驾驶员的操作序列是否合理。针对特定场景的研究,则是考察最容易出事故的驾驶环节。通常会对这些场景、以及场景中的操作进行数学建模,进而描述和评定驾驶行为。常见的场景有停车、超车、变道等。 2)驾驶认知行为建模,这一类的研究,主要是将认知学的理论应用到驾驶行为研究领域。其研究目标是通过分析驾驶操作的内在机理,从本质上解释和理解驾驶行为,完成建模。由于人类对自我处理机制的理解还不够深刻,因此其建模结果很难用实验验证其准确性,更多的只能从定性的层面上对行为进行阐述。 3)驾驶心理研究,该类方法主要是通过调查问卷的方式,由驾驶员自己主观的进行自我评价,大致分为违规(violations)和失误(errors)两类。违规操作指的是驾驶员在明知危险的情况下故意执行的行为,通常用来评价驾驶风格;失误操作则是无意识中做出的危险操作,通常用来评定驾驶水平。 基于驾驶模拟器的数据采集和驾驶行为识别: 驾驶模拟器,通常指的是那些能够提供虚拟驾驶环境的机器。通过3D仿真软件,模拟汽车的真实行车环境;通过传感器,完成驾驶相关数据采集,并将这些信号的变动如实的反映到虚拟驾驶场景中。汽车的各项数据经由两种方式完成传递:传感器数据经由特殊的总线传输,并最终转换为数字信号为程序所使用:场景信息则以消息的形式在软件内部传递。这两种相异的传递方式为数据的采集带来了一定的困难。在驾驶模拟器内,数据的传输并不单单只在汽车总线内部,会在程序间,和网络间传输。在多驾驶模拟器的环境下,通常需要将数据发送到局域网内,供其他机器上的应用使用。 最重要的是:数据采集模块、驾驶行为模块、服务模块。数据采集模块主要是实现驾驶数据的收集和保存,构建模型训练的原始数据,同时为驾驶行为识别模块提供特征向量序列。驾驶行为模块提供了两个功能,
公路平面交叉口驾驶行为研究
160 引言 道路交通系统是由道路使用者(驾驶员、骑自行车 人、行人)、车辆和道路环境构成的系统,在交通事故的 致因分析中,这三种要素导致的事故比例不同。其中由 使用者导致的交通事故占绝大部分,特别是驾驶员。英 国研究表明导致道路交通事故的唯一原因是由驾驶员因 素引起的占65%、美国为57%,而由与驾驶员因素有关 (驾驶员因素、驾驶员—车辆因素、驾驶员—道路环境 因素和驾驶员—车辆—道路环境因素)引起的占95%、 美国为94%[1]。我国道路交通事故统计也表明,主要由 驾驶员造成的事故占90%左右。国际驾驶员行为研究协 会(IDBRA)曾经对不同国家的驾驶员进行过调查,调查 结果显示:道路交通事故中驾驶员因素所占比例法国为 85.5%,瑞典为81.1%,西班牙为92%。1986年日本 学者对道路交通事故中驾驶员因素所占比例研究,得出 日本驾驶员人为因素占94%,美国为90%,联邦德国为 81%。虽然各国对交通事故致因分析的条件不同,或者 统计数据来源不同,其结果或多或少地存在差异,但驾 驶员失误作为导致道路交通事故的主要原因已被世界各 国所公认。因此,分析和研究驾驶员驾驶行为,对于道 路交通事故致因辨识、预防和控制,以及提高道路交通 系统的安全性有着重要的意义。 平面交叉口是道路网络的枢纽,也是交通事故多发 地。据资料显示,美国平面交叉口事故数占总事故的 36%左右;联邦德国农村交通事故的36%发生在平面 交叉口,城市交通事故的60%~80%发生在平面交叉 口;日本1990年的死亡事故发生在交叉路口及其附近的 事故数占总事故的42.2%;中国城市交通事故大约30% 发生在平面交叉口[2]。之所以平面交叉口是事故多发地, 原因之一是平面交叉口交通流运行复杂。车辆在通过交 叉口时,驾驶员在极短时间内不但要对大量交通信息作 出正确而准确的反应,而且还要完成一系列复杂的操 作,如减速、转向等,从而容易发生驾驶行为失误,进 而导致交通事故的发生。由于目前我国公路平面交叉口 设计不甚合理,又缺少必要的交通控制,加之机动车流、 非机动车流、行人没有设置分隔带,使得公路平面交叉 口混行严重。因此本文着重研究公路平面交叉口驾驶行 为(为了方便,公路平面交叉口以下简称为交叉口)。 1 交叉口交通系统 交叉口交通系统属于道路交通系统,但是它远远复 杂于一般的道路交通系统,如路段交通系统,因此有必 要单独重点分析。交叉口交通系统是指交叉口功能区[3] 内的道路交通系统,是由进入交叉口功能区的相互作用公路平面交叉口驾驶行为研究 ■潘福全,项乔君,陆键,张国强 东南大学交通学院,南京 210096 摘 要:面对目前公路平面交叉口交通事故严重的现状,为了公路平面交叉口交通事故致因分 析和加深对交叉口驾驶行为的了解程度,探讨了公路平面交叉口驾驶行为理论,总结了目前道路 交通系统交通事故原因及其导致事故所占比例,分析了交叉口交通系统,给出了影响交叉口驾驶 行为的具体因素。在驾驶行为三阶段基础上,研究了交叉口驾驶行为模型,分析了交叉口驾驶行 为特征和交叉口驾驶行为与交通事故发生的一般关系。并针对驾驶失误和不安全驾驶行为给出了 防止措施,以减少交叉口交通事故。 关键词:平面交叉口;驾驶行为;交通冲突;交通事故;交通安全 收稿日期:2007-05-31 作者简介:潘福全(1976—),男,汉,山东潍坊人,博士研究生,研究方向为交通安全、智能交通。E-mail:panfuquan@sina.com
基于多小波分析的多层感知器驾驶行为识别技术
采用多小波变换和多层感知分类器的驾驶姿势识别技术 摘要 开发了以人为中心的驾驶员辅助系统(HDAS)实现自动检测和识别驾驶行为,提出了一种基于GHM的有效的驾驶姿势特征识别方式,利用多小波变换和多层感知器识别了四种预定义的驾驶姿势。从SEU创建的驾驶姿势数据库提取的特征,通过与IKSVMs 、kNN分类器和Parzen分类器相比,选用MLP分类器对驾驶姿势进行层实验和交叉验证试验。实验结果表明,基于GHM多小波变换和MLP分类器的特征提取,与IKSVMs, kNN分类器和Parzen分类器相比,使用softmax激活函数将激活层和双曲正切函数的隐层能提供最佳的分类性能。实验结果还表明,在四个预定义的分类中手机是最困难的一个,在维持和交叉验证实验中分别为83.01%和84.04%。这些结果表明以人为中心的驾驶辅助系统(HDAS)采用GHM多小波变换和MLP分类器来提取特征实现,自动检测和识别驾驶行为的方法是有效的。 1、驾驶姿势数据采集和规范化 在驾驶姿势数据收集工作使用罗技C905 CCD相机。通过10个男司机和10女司机采集驾驶姿势数,汽车在自然条件下的室外停车场,随着环境的变化改变灯光的强度。已经建立好的数据库有四种的驾驶姿势数据,即把握方向盘,变速杆操作,吃一块蛋糕和打电话。图1显示了驾驶姿势数据样本组成的80组驾驶姿势图片,每一张图片都有480×640像素的分辨率。 图一、四种驾驶姿势。(a)把握方向盘,(b)变速杆操作, (c)吃一块蛋糕,(d)打电话
为了解决驾驶姿势数据采集图像的光照变化问题,采用提高图像质量的办法。称为同态滤波器(HOMOF), 即为著名的标准化方法。利用HOMOF,图像首先转换为对数,注重频域分析。然后通过逆傅里叶变换反向转换到时域,并采取适当的指数运算。对驾驶图像感兴趣的对象主要是类似皮肤颜色的区域,如驾驶员的头部,右手和左手。这是一个事实,人的肤色无论种族都有非常相似的色性能,在一定的光照条件下肤色检测可以是相当强大。彩色像素为肤色和非肤色可以通过在RGB空间进行标准化分类工作。一个RGB的坐标(R,G,B)为每个原色0和255之间的值被标准化到坐标(R0,G0,B0),可以利用下列关系: 标准化的颜色(r0,g0,b0)被归类到肤色,如果它位于这个区域,则可以用下面的方法来标准化RGB空间。 图2显示了四个肤色分割的HOMOF图像预处理结果。 图二、肤色分割处理结果 2、用多小波变换提取特征 基于机器视觉的人体姿态识别具有挑战性,主要是由于人体的动作和空间位置变化的复杂,由于需要采用鲁棒性来评价车辆在行驶过程中的光照条件使得这一问题更加复杂了。在本节中,我们展示了利用司机裸露的皮肤,以及司机的头部和左右手的空间位置来建立驾驶员的姿态特征。在一般小波的情况下,可以允许一个多分辨率的分析{V n},n∈N, L2(R)是一个有有限函数生成的拓展函数φ(t)=( φ0(t), φ1(t), …,φm-1(t))T,m∈N和t是一个时间变量,然后利用下面的多尺
驾驶员安全驾驶行为规范
驾驶员安全驾驶行为规范 出车前,对车的安全技术性能进行例行检查,轮胎,灯光,油箱, 水箱,灭火器、GPS等 驾驶车辆时,必须携带危险品驾驶证、行驶证和保险证; 严禁疲劳驾驶,驾驶车辆时不准赤脚、穿拖鞋、穿高跟鞋,戴耳机 或耳塞,不得向车外抛物,在行车中驾驶员和前排乘坐人员须系好 安全带,下坡严禁脱档滑行,下长坡要防止制动鼓过热,使用真空 制动的车辆严禁熄火或脱档滑行。空挡滑行节省燃料消耗许多驾驶 员都认为汽车空挡高速滑行最省耗,其实对于现代电控发动机技术 的汽车来说既不省耗,也不安全。柴油电喷发动机的电控系统具有 减速、减油和断油的功能,所以驾驶员在驾驶车辆下坡时不要脱档 滑行。 转弯做到“四件事”,即减速、鸣号、靠右行、随时准备停车。 会车、让车做到“礼让三先”,即先让、先慢、先停;不得强行超车。 行车中做到礼貌行车,“宁停勿绕”,“宁停三分不抢一秒”,危 险路段不得冒险通过。 停车要选择道路宽阔,视线良好路段靠右停放,坡道停车垫好三角木。山区停车要注意防止意外事件发生。 车辆途中发生故障时,要尽快将车辆移至安全、不妨碍交通的地段,并在车后设置警告标志或开危险信号灯,夜间还需开示宽灯、尾灯 或设置明显标志。 到厂后,不得在工厂闲逛,逗留 合理节油 汽车在运行过程中,遇到的情况是千变万化的,公路上的车、人流 动情况、道路情况、气候情况等都是不断的改变。驾驶员要能随时 随地的依据变化情况,做出正确的判断和处置,控制行车速度和温度,减少不利因素,利用有利条件,使汽车少用燃料,降低百 公里消耗。
合理换挡汽车行驶过程中,随着道路条件、环境和交通流量等情况的变化,需要不断的变换挡位调整行驶速度,使驱动车轮获得所需的驱动力。如果不能正确的选择行驶挡位,造成抵挡高速或高挡低速,都会增加燃料消耗。 【本文档内容可以自由复制内容或自由编辑修改内容期待你的好评和关注,我们将会做得更好】
驾驶员安全行为规范
驾驶员安全行为规范 出车前—— 一、有下列情况之一的,不得驾驶车辆;饮酒、服用了国家管制的精神药品或者麻醉药品、患有妨碍安全驾驶的疾病、过度疲劳、家庭和社会矛盾影响情绪的。 二、加强车辆日常保养,定期进行二级维护,确保车辆技术状况良好,检查车辆燃(润)油、冷却水是否加足,检查安全监控设施设备(GPS和行驶记录仪)、空调、视听等设备是否完好,确保设施完好有效。不得驾驶安全设施不全或者安全技术状况不符合安全技术标准要求和有安全隐患的车辆。 三、严格按照驾驶证、从业资格证规定的准驾车型驾驶车辆,认真执行客运作业计划。 四、自觉接受安全教育培训和提醒;自觉接受“三不进站五不出站”安全检查。 五、向旅客郑重作出“安全驾驶承诺”,自觉接受广大旅客监督。 行驶中—— 一、严格按照《车辆运输安全操作规程》驾驶,按照规定的线路、站点、班次、时间运行,不将车辆转交他人驾驶。 二、不开情绪车、不开冒险车、不开急躁车、做到不超速超载、不疲劳驾驶、不酒后驾驶、不接打电话、不抽烟、不吃东西、不与他人闲谈。 三、连续驾驶车辆4小时必须停车休息,休息时间不得少于20分钟,防止疲劳驾驶,在中途休息时,驾驶员应检查轮胎、轮彀、仪表、灯光等是否正常,确保车辆技术状况完好。 四、不得在弯道上超车,在高速路上行驶时,要注意保持车距,不得长时间占道行驶;不得倒车、逆行、穿越中央隔离带掉头;车辆需驶出高速公路时应提前减速后变道,不得临近出口时突然减速变道;不得在车道内停车上、下旅客。 五、车辆通过漫水桥、便桥(道)、浮桥、水毁、塌方等危险路段时,应严格遵守“一慢、二看、三通过”的规定停观察,确认安全后低速通过,必要时让所有旅客下车步行通过,避免发生意外事故。 六、在山区,停车视距不良或道路状况不良的路段行驶时,应严格遵守“减速、鸣号、靠右行”、“宁停勿绕”、“宁停三分不抢一秒”安全行车的规定,不得在弯道上、下陡坡时强行超车。七、车辆通过施工作业路段时,应注意施工安全警示标志的警示,自觉遵守交通法规,服从交通管理人员的指挥,严禁强行闯关、超速、抢(占)道行驶。如遇塌方、水毁、飞石路段、危及行车安全或道路情况不明时要果断停车,应立即向车属单位和有关单位报告,不得擅自绕行;在不能确保安全的情况下,不得冒险行驶。
机动车驾驶员不良驾驶行为研究
哈尔滨工业大学工程硕士学位论文 摘要 随着城市化进程的不断推进,我国城市建设发生了翻天覆地的变化,城市的不断扩张给人民生活带来便利的同时,也出现了诸多问题,如城市有限的空间与巨大人口的交通需求之间的矛盾日益锐化,交通拥堵、交通事故等城市交通病已经制约了城市的有序发展。为实现我国从交通大国转变为交通强国的新政策,需要对交通的最大权重参与者——机动车驾驶员的进行研究,而驾驶员的不良驾驶行为成为城市交通事故频发、交通秩序混乱的主要原因之一。为了有效解决这一难题,需要对机动车驾驶员不良驾驶行为的形成机理及关键性影响因素进行深入研究,据此有针对性的制定改善策略,为减少不良驾驶行为,提高道路交通安全水平,提供理论上的支撑及参考。 论文首先对不良驾驶行为心理因素、行为理论模型对各类不良驾驶行为的影响机理进行了综合分析;然后,运用RP/SP调查法完成了机动车驾驶员个人基本信息、不良驾驶行为表征信息以及不良驾驶形成认知状况信息数据的采集,结合相关统计学中的描述性统计分析、信度分析、效度分析以及因子分析,来处理和分析调查数据;接着,通过对计划行为理论和保护动机理论的整合,构建了机动车驾驶员不良驾驶行为整合模型,选取新手驾驶员和熟练驾驶员的不良驾驶行为调查数据,基于偏最小二乘估计对两者整合模型进行拟合,得出行为态度、主观规范、感知行为控制、威胁易感性、威胁严重性、奖励、反应成本、反应效能以及自我效能对两者的不良驾驶行为意向均产生了显著的影响,发现对于新手驾驶员而言,其自我效能对不良驾驶行为的解释力最高,而对于熟练驾驶员而言,其行为态度对不良驾驶行为的解释程度最好。同时对两者的模型适配度进行了检验分析,证实了潜变量之间的因果假设;最后,根据新手驾驶员和熟练驾驶员的不良驾驶行为模型验证结果,对比分析二者不良驾驶行为形成机理,并据此制定了有针对性的差异化改善策略。 论文从行为理论的角度出发,明确了影响机动车驾驶员不良驾驶行为的关键性因素,分别量化并分析了新手驾驶员和熟练驾驶员不良驾驶行为的形成机理,有效解释了两者不良驾驶行为的特征,并为两者不良驾驶行为的早期教育、管理干预以及后期相关奖惩政策措施的差异化制定提供理论依据。 关键词:不良驾驶行为;计划行为理论;保护动机理论;结构方程模型 - I -
客车驾驶员安全驾驶行为要求(通用版)
客车驾驶员安全驾驶行为要求 (通用版) Safety management is an important part of enterprise production management. The object is the state management and control of all people, objects and environments in production. ( 安全管理 ) 单位:______________________ 姓名:______________________ 日期:______________________ 编号:AQ-SN-0715
客车驾驶员安全驾驶行为要求(通用版) (1)严格遵守道路安全法律、法规和道路运输驾驶操作规程,谨慎和安全驾驶、文明礼让、安全行车; (2)出车前、行车中、收车后要做好车辆的日常检查和维护,确保车辆安全技术状况良好;保持车辆清洁和车内空气清新,保证车上消防等各项设备、设施齐备有效; (3)提醒乘客遵守有关规定,不要将手和头部伸出窗外; (4)旅客上车坐稳后,确认车门关好后起步;起步或停车时,应尽可能平稳,以避免乘客受伤; (5)行车途中密切关注车辆技术状况,发现故障或不安全的隐患,应及时停车、排除,不得驾驶带病车辆继续行驶; (6)客车行经险桥、渡口、危险地段-和加油前,要组织旅客
下车;旅客上车后,须核实人数后方能开车; (7)遇到紧急情况或发生事故应尽快呼救、抢救伤员,保护好现场,必要时及时组织旅客疏散; (8)运输过程中发生侵害旅客人身、财产安全的治安违法行为时,在自身能力许可的情况下,应当及时向公安机关报告并配合公安机关及时终止治安违法行为。 XXX图文设计 本文档文字均可以自由修改
基于驾驶行为的疲劳驾驶判别算法研究
第16卷第6期2016年12月道路交通与安全Vol.16 No.6 Dec.2016 DOI:10.13986/https://www.wendangku.net/doc/2719192754.html,ki.jote.2016. 06. 004 基于驾驶行为的疲劳驾驶判别算法研究 万蔚,王振华,王保菊 (中国航天系统工程有限公司,北京100070) 摘要:为了有效判别驾驶员的疲劳驾驶状态,本文利用模拟驾驶器开展驾驶实验,采集了 20名驾驶员在疲劳状 态和正常状态的实验数据;为了提取能表征驾驶员疲劳和正常驾驶状态时的行为特征,本文对获取的速度、方向盘 转角和车辆横向位置的样本熵进行了分析,最终提取了该三类参数的样本熵作为疲劳驾驶的有效特征组;构建了 基于BP神经网络的驾驶员疲劳驾驶判别算法,并采用测试集样本对构建的算法进行验证.实验结果表明:该算法 对于驾驶员疲劳驾驶检测的准确率较好、运行时间较短、具有较好的鲁棒性和实用性. 关键词:交通安全;驾驶行为;疲劳驾驶;BP神经网络;样本熵 中图分类号:U491. 254 文献标志码:A文章编号:1008-2522(2016)06-21鄄04 Research on Detection of Fatigue Driving Based on Driving Behaviors WAN Wei,WANG Zhen-hua,WANG Bao-ju (China Aerospace System Engineering Company,Beijing 100070,China) Abstract:In order to effectively detect the fatigue driving behavior,a driving experiment was conducted in a driving simulator.The driving states were divided into 2 levels:fatigue state and normal state.A total of20 drivers participated in the experiment.In order to extract the features that can effectively display the driver爷s driving behaviors,this paper compared the sample entropy of speed,steer and LP parameters,and found these features can measure the performance of the driving behavior well and can be used to build the classifier.Finally,a classifier based on BP was established to detect the fatigue driving,and a test set was used to verify this classifier.The results show that the classifier based on BP has a better detection accuracy,shorter running time and better robustness and practicability. Key words:traffic safety;driving behavior;fatigue driving;BP neural network;sample entropy 1概述 近年,随着我国机动车保有量的增长,交通事故 的发生率迅猛增加,道路交通安全问题逐渐成为人 们关注的焦点之一.分析引起道路交通事故的原因 发现,85%以上的交通事故是由驾驶员自身因素导 致的,其中疲劳驾驶是引发交通事故的主要原因之 一⑴.因此,如何能快速、有效地检测驾驶员疲劳状态,对交通安全具有重大意义. 目前,国内外学者针对疲劳驾驶判别问题开展 了很多研究,也取得了一定成果,其中以脑电特征和 面部特征检测为代表.但这两种方法仍存在较多不 足:1)脑电特征检测虽然准确性高,但大多数检测 装置均需与驾驶员身体接触,这会影响驾驶员的驾 驶操作,较难推广应用;2)基于面部特征的检测方 法通常采用图像处理方法来获取驾驶员在驾驶过程 收稿日期:2016-07-11. 基金项目:交通运输部2014年度科技项目(批准号:2014364222110) 作者简介:万蔚(1988—),硕士,工程师,研究方向为智能交通.E-mail:wanwei817@ 163. com .
驾驶员主要不安全驾驶行为及原因
讨论驾驶员主要不安全驾驶行为原因 众所周知,影响道路的交通安全因素很多,包括道路、气候、自然环境、地理条件,以及人的身体状况、心理因素、驾驶技能等等。但归纳起来,主要有两大因素,即人的不安全行为与物的不安全状态。人的不安全行为是影响道路交通安全最直接最重要的因素,而交通行为的心理因素又是直接支配和影响驾驶员交通安全行为的直接因素。因为在人与车之间,人始终处于主体地位。人是能动的,处于支配地位。一个驾驶员在驾车行驶中,其心理是否正常,直接关系到判断是否正确、操作是否得当、行为是否规范,直接关系到能否安全行车。所以,人的心理因素直接支配着人的大脑和神经中枢系统。分析驾驶员的心理因素和季节因素,找出影响交通安全的主观原因,对于有效地控制人的不安全行为,保证道路交通安全,预防和减少道路交通事故,具有十分重要的现实意义。 一、驾驶员的不安全心理因素的主要表现 纵观庞大的驾驶员群体,存在的不安全心理因素主要有以下几个方面: 1、无所谓心理。通常表现为对自己的违章行为觉得无所谓,心不在焉,满不在乎,根本没有意识到危险的存在,对交通安全法律法规熟视无睹。这样的心态在国家权力机关的公用车辆驾驶员、私企领导的驾驶员体现得较多。他们虽然有充分的学习交通安全法的时间和精力,然而,由于主观努力不够或单位缺乏组织督促学习系统的交通安全知识,所以,仅有的一知半解的知识或经验,与当前的交通安全形势需要相比,还存在一定的差距。这些人仅凭自己的经验和自信心,自以为是,我行我素。他们往往在交通法规面前觉得无所谓,把领导和交通民警的要求当成耳旁风,把交通安全置之脑后,把安全监督视为找麻烦,自以为绝对安全,思想麻痹,疏忽大意。他们在驾车行为上表现为频频违章,由此引发一些交通事故。 2、侥幸心理。这是许多违章驾驶人员存在的主要心态。有这种心态的人,往往不遵守交通规则,缺乏安全意识,多数表现为明知故犯。在他们看来,违章不一定出事。例如:机动车不允许超速行驶,但存有侥幸心理的人偏不按规定执行,明知故犯,这是典型的习惯性违章。这些人在行车时,看到路面没有交警执勤,就肆意违章行车,觉得自己的行为不会被发现。即使被发现了,也可以通过托关系、走后门,会侥幸逃脱,免于被处罚。 3、情绪波动较大,注意力不集中。一些驾驶员受家庭、工作环境和外部环境等因素的影响,容易产生烦操情绪,神志不安,思想分散,手忙脚乱,顾此失彼,或者心情高度喜悦、兴奋,驾车与乘员聊天,手舞足蹈,得意忘形,导致不安全行为。部分驾驶人员由于单调繁重的重复工作,如搬家、运油、运粮、运煤,常年奔波在野外,容易产生心理疲劳和厌倦行为,感到生活乏味,容易引发交通事故。 4、技术生疏,遇险慌乱。部分驾驶人员由于驾驶技术不熟练,或者驾龄短,对突如其来的异常情况,正常的思维被打乱,束手无策,惊慌失措,手忙脚乱,酿成事故。还有一些驾驶人员偶然感到自己"莫名其妙"地违章,这其实是人体心理幻觉所致。这样的驾驶人员由于驾车技术不高,晚间驾车精神高度紧张,容易产生错觉或者幻觉,造成判断失误,酿成交通事故。 5、骄傲自大,争强好胜。自己工作能力不强,但自信心过强,总认为自己工龄长、驾龄长,虽然有时也感觉到自己力不从心,但为了在众人面前不失面子,争强好胜,图虚荣,因而不计后果,违章行驶。 6、盲目从众,逆反心理。部分驾驶人员看见别人行车违章,自己也跟着违章,对执行交通安全规章制度存有逆反心理,安全监督人员检查时遵章而行,事后照样违章。一旦违章被查处,不从自身找原因,而是怨天尤人,觉得自己"没人",甚至谩骂殴打执勤交警,造成路人围观,给执勤交警造成不良影响。
2021年驾驶行为和安全技术
( 安全常识 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 2021年驾驶行为和安全技术 Safety accidents can cause us great harm. Learn safety knowledge and stay away from safety accidents.
2021年驾驶行为和安全技术 根据公安交通管理部门最近的数据分析,今年以来的交通事故与去年相比又呈上升之势。于是,行车安全又成为人们关注的话题。因为行车安全不仅需要先进设施,更需要驾驶者的安全驾驶意识。 无庸置疑,先进的汽车安全设施是行车安全不可或缺的保障。从汽车诞生的那一天起,各大汽车制造商就开始为设计打造安全设施更完善的汽车而不断努力着。但如果驾驶者安全驾驶的意识淡薄,不懂得或者没有正确运用这些安全设施,甚至违反行车安全的规则,那么即使所驾汽车的安全配置再先进,驾驶安全也无从谈起。 当驾驶员驾车行驶时,首先要正确使用安装在车内的安全设施,如必须配戴好安全带,转向或变道时要使用方向灯,及时使用刹车系统以确保行车安全等。其次,驾驶者必须严格遵守各项交通规则,按照交通信号指示灯或交通标志的规定行驶,控制车速,保持车距,
变道、超车时谨慎细心,始终以责任心规范自己的驾驶行为。 再次,驾车者在驾驶车辆时需要保持高度的注意力,精力集中,随时收集路况信息,为安全行驶提供必要条件。在行驶途中,某些情况会分散驾驶者的注意力,应当尽量避免,例如:开车时打电话,可以使驾驶员的注意力下降20%-70%;车窗前的不停摇晃的装饰物会扰乱驾驶者的视觉;收听音乐时音量过大也会分散驾驶者的注意力,降低判断情况的准确性(实验表明,当音量为75分贝时,驾驶员判断的失误率不到24%,而当音量为95分贝时,判断的失误率则高过40%)。 云博创意设计 MzYunBo Creative Design Co., Ltd.