PLC五条皮带课程设计概述

目录
一、设计任务书 (1)
二、设计方案的选择 (3)
2.1方案比较 (3)
2.2方案确定 (4)
三、电气主电路图 (5)
四、控制电路和保护电路图 (5)
五、PLC接线图,I/O分配、梯形图设计及指令表 (6)
5.1PLC接线图 (6)
5.2I/O分配表 (6)
5.3梯形图 (7)
5.4指令表 (10)
六、所有低压电气电器型号选择清单 (14)
七、心得体会 (17)
八、参考文献 (18)
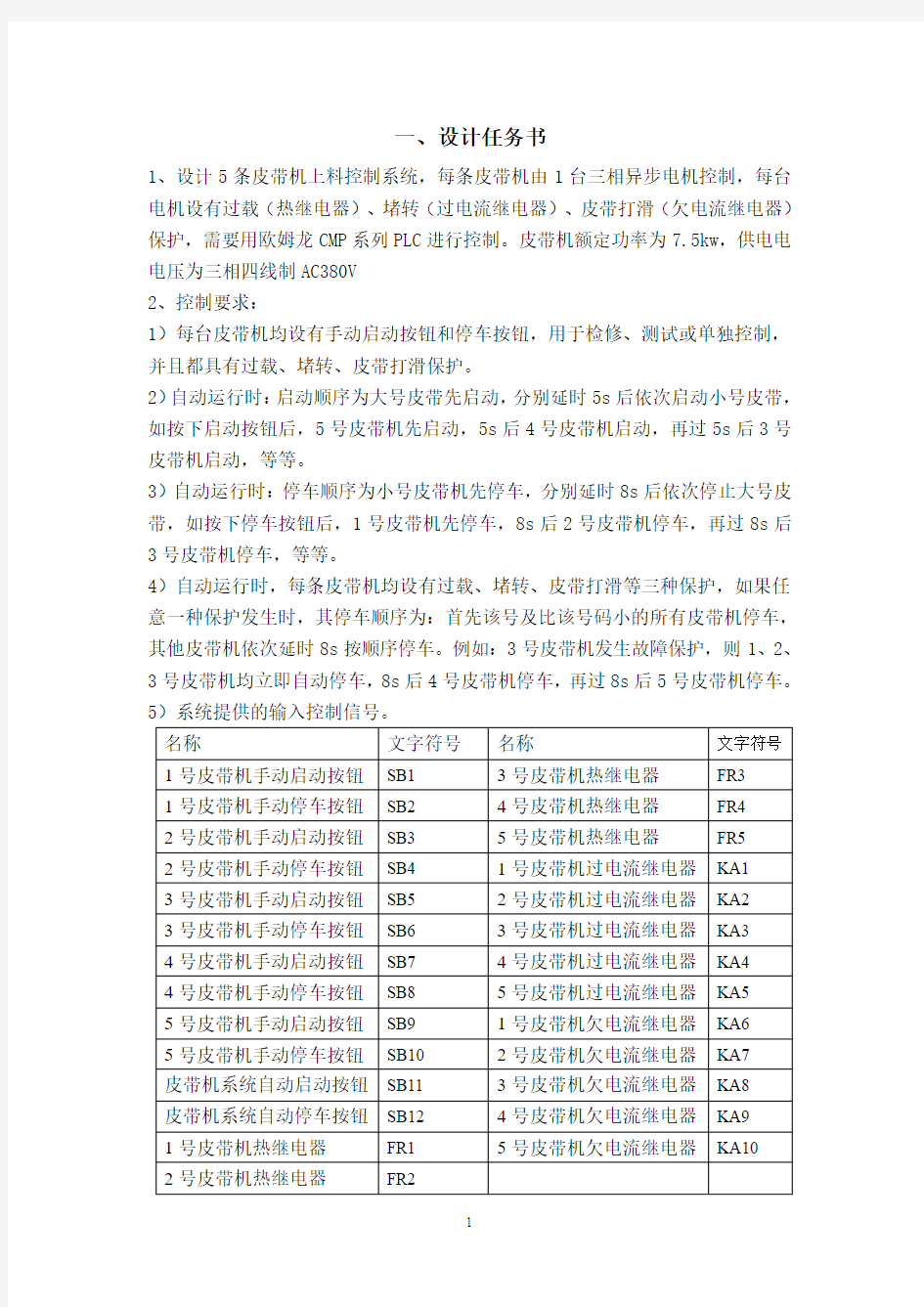
一、设计任务书
1、设计5条皮带机上料控制系统,每条皮带机由1台三相异步电机控制,每台电机设有过载(热继电器)、堵转(过电流继电器)、皮带打滑(欠电流继电器)保护,需要用欧姆龙CMP系列PLC进行控制。皮带机额定功率为7.5kw,供电电电压为三相四线制AC380V
2、控制要求:
1)每台皮带机均设有手动启动按钮和停车按钮,用于检修、测试或单独控制,并且都具有过载、堵转、皮带打滑保护。
2)自动运行时:启动顺序为大号皮带先启动,分别延时5s后依次启动小号皮带,如按下启动按钮后,5号皮带机先启动,5s后4号皮带机启动,再过5s后3号皮带机启动,等等。
3)自动运行时:停车顺序为小号皮带机先停车,分别延时8s后依次停止大号皮带,如按下停车按钮后,1号皮带机先停车,8s后2号皮带机停车,再过8s后3号皮带机停车,等等。
4)自动运行时,每条皮带机均设有过载、堵转、皮带打滑等三种保护,如果任意一种保护发生时,其停车顺序为:首先该号及比该号码小的所有皮带机停车,其他皮带机依次延时8s按顺序停车。例如:3号皮带机发生故障保护,则1、2、3号皮带机均立即自动停车,8s后4号皮带机停车,再过8s后5号皮带机停车。5)系统提供的输入控制信号。
名称文字符号名称文字符号
1号皮带机手动启动按钮SB1 3号皮带机热继电器FR3
1号皮带机手动停车按钮SB2 4号皮带机热继电器FR4
2号皮带机手动启动按钮SB3 5号皮带机热继电器FR5
2号皮带机手动停车按钮SB4 1号皮带机过电流继电器KA1
3号皮带机手动启动按钮SB5 2号皮带机过电流继电器KA2
3号皮带机手动停车按钮SB6 3号皮带机过电流继电器KA3
4号皮带机手动启动按钮SB7 4号皮带机过电流继电器KA4
4号皮带机手动停车按钮SB8 5号皮带机过电流继电器KA5
5号皮带机手动启动按钮SB9 1号皮带机欠电流继电器KA6
5号皮带机手动停车按钮SB10 2号皮带机欠电流继电器KA7
皮带机系统自动启动按钮SB11 3号皮带机欠电流继电器KA8
皮带机系统自动停车按钮SB12 4号皮带机欠电流继电器KA9
1号皮带机热继电器FR1 5号皮带机欠电流继电器KA10
2号皮带机热继电器FR2
6)系统需要输出的开关控制信号.
名称文字符号名称文字符号1号皮带机接触器KM1 1号皮带机故障报警指示灯HL6
2号皮带机接触器KM2 2号皮带机故障报警指示灯HL7
3号皮带机接触器KM3 3号皮带机故障报警指示灯HL8
4号皮带机接触器KM4 4号皮带机故障报警指示灯HL9
5号皮带机接触器KM5 5号皮带机故障报警指示灯HL10 1号皮带机运行指示灯HL1
2号皮带机运行指示灯HL2
3号皮带机运行指示灯HL3
4号皮带机运行指示灯HL4
5号皮带机运行指示灯HL5
二、设计方案的选择
2.1方案比较
就目前的现状有以下几种控制方式满足系统的要求:继电器控制系统、单片机控制、工业控制计算机控制、可编程序控制器控制。
(1)继电器控制系统
控制功能是用硬件继电器实现的。继电器串接在控制电路中根据主电路中的电压、电流、转速、时间及温度等参量变化而动作,以实现电力拖动装置的自动控制及保护,系统复杂,在控制过程中,如果某个继电器损坏,都会影响整个系统的正常运行,查找和排除故障往往非常困难,虽然继电器本身价格不太贵,但是控制柜的安装接线工作量大,因此整个控制柜价格非常高,灵活性差,响应速度慢。
(2)单片机控制
单片机作为一个越大规模的集成电路、机构上包括CPU、存储器、定时器和多种输入/输出接口电路。其低功耗、低电压和很强的控制功能,成为功控领域、尖端武器、日常生活中最广泛的计算机之一。但是,单片机是一片集成电路,不能直接将它与外部I/O接口电器上、硬件设计、制作和程序设计的工作量相当大。
(3)工业控制计算机控制
工控机采用总线结构,各厂家产品兼容性强,有实时操作系统的支持,在要求快速、实用性强、功能复杂的领域中占优势。但工控机价格较高,将它用于开关量控制有些大材小用。且其外部I/O接线一般都用于多芯扁平电缆和插头、插座,直接从印刷电路板上引出,不如接线端子可靠。
(4)PLC控制
可编程序控制器配备各种硬件装置供用户选择,用户不用自已设计和制作硬件装置,只须确定可编程序控制器硬件配制和设计外部接线图,同时采用梯形图语言编程,用软件取代继电器电器系统中的触点和热线,通过修改程序适应工艺条件的变化。
可骗程控制(PLC)从上个世纪70年代发展起来的一种新型工业控制系统,起初它主要是针对开关量进行逻辑控制的一种装置,可以取代中间继电器、时间继电
器等构成开关量控制系统。随着30多年来微电子技术的不断发展,PLC也通过不断的升级换代大大增强了其功能。现在PLC已经发展成为不但具有逻辑控制功能、还具有过程控制功能、运动控制功能和数据处理功能、连网通讯功能等多种性能,是名符其实的多功能控制器。由PLC为主构成的控制系统具有可靠性高、控制功能强大、性价比高等优点,是目前工业自动的首选控制装置。
2.2 方案确定
通过对多种设计方案的比较,决定选择可编程控制系统,相比于继电器系统,它性能可靠性高,接线很简单,系统不复杂,易于维护,性能先进,易于改造。和单片机系统相比,它编程简单,易于掌握,连线简单。工业控制计算机控制系统性能先进,但是价格昂贵,系统复杂,对于本系统而言实在是大材小用。
综上所述,本次设计应选择PLC控制更为合理。
三、电气主电路图
供电电电压为三相四线制AC380V,线路上有三极电源开关,低压断路器及熔断器保护电路。五台交流电机接在三相电源上,并且由各自独立的触点控制,交流电机上有过电流、欠电流及热继电器保护装置,用来对应的皮带堵转、打滑及过载的故障。
电路主电路图见后面附录一(手绘图)。
四、控制电路和保护电路图
按下SB11,电路自动运行,电机从大号到小号依次启动,自动运行过程中,只要出现堵转、打滑、过载故障时,如果任意一种故障发生时,其停车顺序为:首先该号及比该号码小的所有皮带机停车,其他皮带机依次延时8s按顺序停车。按下SB12,电路停止运行,电机从小号到大号依次停止。同时电路也加了保护电路,防止过载、过流。
控制电路和保护电路图见后面附录一(手绘图)。
五、PLC接线图,I/O分配、梯形图设计及指令表
5.1PLC接线图
PLC接线图见附录二(手绘图)。
5.2 I/O分配表
名称(输入)符号I/O 名称符号I/O 1号皮带机手动启动按钮SB1 0.01 1号皮带机热继电器FR1 1.04 1号皮带机手动停车按钮SB2 0.02 2号皮带机热继电器FR2 2.04 2号皮带机手动启动按钮SB3 0.03 3号皮带机热继电器FR3 3.04 2号皮带机手动停车按钮SB4 0.04 4号皮带机热继电器FR4 4.04 3号皮带机手动启动按钮SB5 0.05 5号皮带机热继电器FR5 5.04 3号皮带机手动停车按钮SB6 0.06 1号皮带机过电流继电器KA1 1.03 4号皮带机手动启动按钮SB7 0.07 2号皮带机过电流继电器KA2 2.03 4号皮带机手动停车按钮SB8 0.08 3号皮带机过电流继电器KA3 3.03 5号皮带机手动启动按钮SB9 0.09 4号皮带机过电流继电器KA4 4.03 5号皮带机手动停车按钮SB10 0.10 5号皮带机过电流继电器KA5 5.03 皮带机系统自动启动按钮SB11 0.11 1号皮带机欠电流继电器KA6 1.05 皮带机系统自动停车按钮SB12 0.12 2号皮带机欠电流继电器KA7 2.05
3号皮带机欠电流继电器KA8 3.05
4号皮带机欠电流继电器KA9 4.05
5号皮带机欠电流继电器KA10 5.05
名称(输出)符号I/O 名称符号I/O
1号皮带机接触器KM1 10.01 4号皮带机运行指示灯HL4 11.04 2号皮带机接触器KM2 10.02 5号皮带机运行指示灯HL5 11.05 3号皮带机接触器KM3 10.03 1号皮带机故障报警指示灯HL6 12.01 4号皮带机接触器KM4 10.04 2号皮带机故障报警指示灯HL7 12.02 5号皮带机接触器KM5 10.05 3号皮带机故障报警指示灯HL8 12.03 1号皮带机运行指示灯HL1 11.01 4号皮带机故障报警指示灯HL9 12.04 2号皮带机运行指示灯HL2 11.02 5号皮带机故障报警指示灯HL10 12.05 3号皮带机运行指示灯HL3 11.03
5.4指令表
六、所有低压电气电器型号选择清单1)交流接触器的型号意义:
2)热继电器的型号意义:
3)熔断器的型号意义:
皮带运输机传输系统梯形图控制程序设计与调试
皮带运输机传输系统梯形图控制程序设计与调试 摘要:皮带机是皮带输送机的简称,皮带机运用输送带的连续或间歇运动来输送各种轻重不同的物品,既可输送各种散料,也可输送各种纸箱、包装袋等单件重量不大的件货,用途广泛。它的控制形式也多种多样,它可以由单片机,PLC,以及计算机来控制,由于PLC为主构成的控制系统具有可靠性高、控制功能强大、性价比高等优点,是目前工业自动的首选控制装置,故本设计中采用PLC集中控制的办法,本设计中利用PLC简单可视化的程序,采用了手动和自动控制的两种不同的控制方式。 关键词:皮带机 PLC 手动控制自动控制
毕业设计说明书目录 第一章前言 (24) 第二章控制器选择方案确定 (25) 2.1方案比较 (25) 2.2方案确定 (26) 第三章硬件设计 (27) 3.1 设计可行性方案 (27) 3.2 PLC选型 (27) 3.2.1 PLC的组成结构 (27) 3.2.2 PLC的工作原理 (29) 3.2.3 FX2N的性能及选型 (30) 3.2.4 PLC的端子分配及外部接线 (31) 3.3 传感器的选择 (32) 3.3.1 传感器简介 (32) 3.3.2压力传感器 (34) 3.5 控制电机的选型及主回路外部接线图 (37) 3.5.1Y2系列三相异步电机 (37) 3.5.2主回路电机的外部接线图 (38) 3.6 其它硬件选型 (38) 3.6.1 接触器选型 (38) 3.6.2 热继电器选型 (39) 3.6.3 空气开关选型 (39) 第四章软件设计 (40) 4.1控制要求分析 (40) 4.2程序实现 (40)
PLC课设四条皮带运输机的传送系统
目录 引言 (1) 1 控制系统设计要求 (1) 1.1 PLC课程设计主要步骤 (1) 1.2 系统控制要求 (2) 1.2.1控制要求 (2) 1.2.2设计板 (3) 1.2.3四节传送带的工作方式 (3) 2 设计方案 (4) 2.1 总体设计方案说明 (4) 3 系统硬件设计 (4) 3.1 PLC选型及硬件配置 (4) 3.1.1选型原则 (4) 3.1.2选型方法 (4) 3.1.3硬件配置 (4) 3.2主电路设计 (4) 3.3 控制电路设计 (5) 3.4 PLC的I/O接线图 (5) 3.5 PLC接线图 (6) 4 PLC控制软件设计及调试 (6) 4.1 系统程序设计 (6) 4.2程序的模拟与调试 (11)
总结 (12) 参考文献 (13)
引言 可编程序控制器,英文称Programmable Controller,简称PC。但由于PC 和个人计算机(Personal Computer)混淆,故人们仍习惯地用PLC作为可编程序控制器的缩写。它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计,它采用可编程序的存储器,用以在其部存储区域执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接口,控制各种类型的机械或生产过程。PLC是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电器控制系统中的机械触点的接线复杂、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场操作维修人员的技能与习惯,特别是PLC程序的编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程编制形象、直观、方便易学;调试与查错也都很方便。用户在购到所需的PLC后,只需按说明书的提示,做少量的接线和简易的用户程序的编制工作,就可灵活方便地将PLC应用于生产实践。本课题是用PLC 模拟四节传送带的工作。用PLC控制传送带具有程序设计简单、易于操作和理解、能够实现多种功能等优点。此系统能够实现四节传送带的倒序启动和顺序停止以及故障、重物处理等功能 1 控制系统设计要求 1.1 PLC课程设计主要步骤 1、分析被控对象的工艺条件和控制要求。被控对象是指受控的机械、电气设备、生产线或生产过程。在进行系统设计时,首先需要深入了解被控对象的特
皮带输送机选型设计
皮带输送机选型设计
胶带输送机的选型计算 一、概述 初步选型设计带式输送机,已给出下列原始资料: 1)输送长度m L 7= 2)输送机安装倾角?=4β 3)设计运输生产率h t Q /350= 4)物料的散集密度3/25.2m t =ρ 5)物料在输送机上的堆积角?=38θ 6)物料的块度mm a 200= 计算的主要内容为: 1)运输能力与输送带宽度计算; 2)运行阻力与输送带张力计算; 3)输送带悬垂度与强度的验算; 4)牵引力的计算及电动机功率确定。 二、原始资料与数据 1)小时最大运输生产率为A =350吨/小时; 2)皮带倾斜角度:?=4β 3)矿源类别:电炉渣; 4)矿石块度:200毫米; 5)矿石散集容重3t/m 25.2=λ; 6)输送机斜长8m ;
L ——输送机2-3段长度m 7; 1?——为槽形托辊阻力系数查带式输送机选型设 计手册04.01=?; β——输送机的倾角;其中sin β项的符号,当 胶带在该段的运行方向式倾斜向上时取正号; 而倾斜向下时取负号; 2-3段的阻力k F 为 N L q L q q F k 92.3807.0737.251997 .0035.07)55.9337.251(sin cos 0220-=??-???+=-+=ββ?)( 式中: 0q ——每米长的胶带自重m N /37.251 2q ——为折算到每米长度上的上托辊转动部分的 重量,m N /,m N q /55.932.2/8.9212=?= 式中 2G ——为每组下托辊转动部分重量N ,m N /8.205 2l ——下托辊间距m ,一般取上托辊间距的2 倍;取m l 2.22= L ——输送机3~2段长度m 7; 2?——为槽形托辊阻力系数查带式输送机选型设 计手册035.02=? 不计局部阻力时的静阻力N F F F k zh w 99.204192.3891.2080=-=+= 2、局部阻力计算 (1)图1-1中1~2段和3~4段局部阻力。在换向滚筒处的阻力ht F 近似为:
机械课程设计带式运输机传动装置
河北联合大学轻工学院 QINGGONG COLLEGE, HEBEI UNITED UNIVERSITY 机械设计课程设计课程设计 计算说明书 设计题目带式运输机传动装置
目录 一、设计任务书 (4) 二、减速器总体方案设计 (5) 2.1传动方案的拟定 (5) 2.2电动机的选择 (5) (1)电动机类型的选择 (5) (2)电动机功率的选择 (5) (3)电动机转速的选择 (5) (4)确定电动机型号 (5) 2.3传动比的分配 (6) 2.4运动参数及动力参数计算 (6) 三、V带传动的设计 (8) 3.1确定设计计算功率P d (8) 3.2选择带的型号 (8) 3.3确定带轮基准直径d d1、d d2 (8) (1)选择小带轮的基准直径d d1 (8) (2)验算带速 (8) (3)计算大带轮基准直径d d2 (8) (4)确定中心矩a及带的基准长度L d0 (9) (5)验算小带轮包角 1 (9) (6)确定V带的根数 (9) (7)确定带的初拉力F0 (10)
(10)计算带的轴压力F Q (10) 四、齿轮的设计计算及结构说明 (10) 4.1选择齿轮材料 (10) 4.2计算齿面接触疲劳强度 (10) 4.3确定齿轮的主要参数和计算几何尺寸 (11) 4.4校核齿根弯曲疲劳强度 (12) 4.5计算齿轮的圆周速度及确定精度等级 (12) 五、轴的设计计算及校 (13) 5.1输入轴的设计计算与校核 (13) (1)根据工作要求选择材料 (13) (2)按扭矩初算轴的最小直径 (13) (3)轴的结构设计 (13) (4)轴的强度校核 (15) 5.2输出轴的设计计算与校核 (19) (1) 根据工作要求选择材料 (19) (2)按扭矩粗算的最小直径 (19) (3)轴的结构设计 (20) (4)轴的强度校核 (21) 六、滚动轴承的校核 (26) 6.1 输入轴滚动轴承寿命校核 (26) 6.2输出轴滚动轴承寿命校核 (27) 七、键的选择与校核 (28)
PLC皮带运输机课程教学设计
湖南工程学院 课程设计 课程名称 ________ 电气控制与PLC 课题名称皮带运输机电气控制系统设计 专业班级 _______________________________ 姓名 __________________________________ 学号 __________________________________ 指导教师 _______________________________
2014年3月7日
湖南工程学院 课程设计任务书 课程名称________ 电气控制与PLC 课题名称皮带运输机电气控制系统设计 专业班级_________________________________ 姓名____________________________________ 学号____________________________________ 指导教师_________________________________ 审批___________________________________ 任务书下达日期2014年2月24日
课程设计完成日期2014年3月7日 设计内容与要求 主要设计条件
每人一个PLC实验箱和一台编程电脑 设计说明书装订顺序 1. 课程设计说明书封面。 2. 课程设计任务书。 3. 说明书目录。 4. 正文(按设计内容逐项书写) 5. 参考文献。 6. 附录。 7. 课程设计评分表。 设计进度安排 1. 第一周星期一上午:课题内容介绍。 2. 第一周星期一下午:仔细阅读设计任务书,明确设计任务与要求,收集设计资料,准备设计工具。 3. 第一周星期二?第二周星期一:确定控制方案。绘制皮带运输机电气控制系统的电气原理图、PLCI/O接线图和梯形图,写出指令程序清单。选择电器元件,列出电器元件明细表。 4. 第二周星期一:上机调试程序。 5. 第二周星期二?星期五:编写设计说明书,答辩。 参考文献 [1] 廖常初.可编程序控制器的编程方法与工程应用[M].重庆:重庆大学出版社 [2] 万太福.可编程序控制器及其应用[M].重庆:重庆大学出版社 [3] 刘祖润.毕业设计指导.北京:机械工业出版社 [4] 谢桂林.电力拖动与控制.北京:中国矿业大学出版社
推荐-课程设计皮带运输机传动装置 精品
课程设计任务书 课程名称机械设计课程设计 课题名称皮带运输机传动装置专业班级 姓名 学号 指导教师 审批 汽车与交通学院交通工程教研室
机械设计课程设计说明书课题名称:皮带运输机传动装置 班级: 学号: 设计人: 指导教师 完成日期
目录 一、设计任务书 (3) 二、电动机的选择 (5) 三、计算传动装置的运动和动力参数 (7) 四、传动件设计计算............ (8) 五、轴的设计.......... .......... .......... ........... .. .. . (14) 六、润滑方式、润滑油牌号及密封装置的选择 (21) 七、箱体及其附件的结构设计 (21) 八、设计总结 (24) 九、参考资料 (24)
设计任务书 题目:设计皮带运输机的二级直齿圆柱齿轮减速器。 课题号:1 技术数据:输送带有效拉力F=2000N 带速V=0.8m/s 滚筒直径D=200mm 带式运输机的传动示意图 图中,1——电动机2——三角皮带传动3——齿轮减速器4——滚动轴承5——联轴器6——滑动轴承7——运输皮带8——滚筒 工作条件及技术要求: 电源380V; 工作年限:10年; 工作班制:两班 运输机单项运转,工作平稳。 η1,带传动的效率; η2,齿轮的效率;
η3,滚动轴承传动效率; η4,联轴器的传动效率; η5,滑动轴承的传动效率; η6,卷筒的传动效率; η6,卷筒的传动效率; 电动机的机选择 动力来源:电力,三相交流电,电压380V ;所以选用常用的封闭式系列的 ——交流电动机。 1. 电动机容量的选择 1)工作机所需功率P w 由题中条件 查询工作情况系数K A (见[1]表8-7),查得K A=1.2 设计方案的总效率 n 0=n 1*n 2*n 3*n 4*n 5*n 6…n n 本设计中的 η带 ——v 带的传动效率, η滚轴——滚动轴承的传动效率 (3对),齿η—— 齿轮的传动效率(2对),联η——联轴器的传动效率(1个)η滑轴——滑动轴承的传动效率 (2对),η筒——滚筒的传动效率。 其中 η带 =0.96,η轴滚=0.99,齿η=0.97(两对齿 轮的效率取相等),联η=0.99, η滑轴=0.97,η筒=0.96。 总η=322 η带齿联滑轴筒 滚轴ηηηηη=0.96*0.97*0.97*0.99*0.99*o.99*0.99*0.97*0.96=0.808 1.电动机的输出功率 P w==1.6KW Pd = Pw/ 总 η, 总η=0.808 Pd =1.6/0.808=1.98KW 2. 电动机转速的选择 由v=0.8m/s 求卷筒转速n w V = 1000 *60w dn π=0.8 →w n =76.39r/min, i 总=i1’·i2’…in ’ 由该传动方案知,在该系统存在减速器二级传动比i1,i2和带传动传动比。由[2]表2.1知。二级展开式圆柱齿轮减速器传动比范围为8~40,v 带传动i 带<=8,取i 带=2.4 所以 d n =[8,40]* w n *2.4 所以nd 的范围是(1466.6,7333.44)r/min ,初选为同步转速
皮带输送机工艺设计及主要部件选型
皮带输送机工艺设计及主要部件选型 皮带输送机是一种输送散状物料的输送设备,因其具有输送能力大、结构简单、投资费用相对较低及维护方便等特定而被广泛应用于港口、化工、食品、机械等行业的输送。近年来,随着输送机技术的不断进步和发展,皮带输送机已成为物料输送中的主要输送设备。皮带输送机的布置形式有很多种,每种工况下使用的结构型式各有不同的要求。上海昱音机械根据多年来皮带输送机设计和现场安装使用所总结的经验,本文针对皮带输送机主要部件结构的选型做出如下分析。 皮带输送机主要由机架、传动滚筒、输送带、托辊和拉紧装置等部件组成,其结构如图1所示。 1-头部漏斗;2-机架;3-头部清扫器;4-传动滚筒;5-防跑偏安全装置或调心托辊;6-输送带;7-承载托辊;8-缓冲托辊;9-导料槽;10-改向滚筒;11-螺旋拉紧装置;12-尾架;13-空段清扫器;14-回程托辊;15-中间架。 图1 皮带输送机结构简图 1、托辊 托辊是皮带输送机的重要部件,其作用是支撑输送带和物料重量。托辊运 转过程中必须灵活可靠,以减少输送带同托辊的摩擦力,对输送带的寿命起着关键作用。而托辊组的结构在很大程度上决定了输送带和托辊所受载荷的大小与性质。一般输送散状物料均采用槽型托辊,在用于手选输送机及输送成件物品时则采用平形托辊。托辊组托辊的直径应满足带速要求。 对于托辊的基本要求是: (1)皮带输送机的受料处应设置缓冲托辊组;输送特大块度物料或高差大时,可选用重型缓冲托辊。 (2)固定式输送机宜采用固定托辊组,向上、向下以及水平输送机承载分支宜选用吊挂托辊组。 (3)托辊需使用可靠,有较小的回转阻力系数,制造成本低,托辊表面必须满足光滑及径向跳动小等要求。 (4)输送机凹、凸弧的槽型过渡段,应设过度托辊组。 (5)为了防止和克服输送带跑偏现象,可选用自动调心托辊。 2、滚筒结构 传动滚筒和改向滚筒的结构,应根据承载能力选择。滚筒的结构型式为: 大功率皮带输送机宜选用铸焊结构;中小型皮带输送机宜选用钢板卷制结构。短
PLC皮带运输机控制系统课程设计
目录 第1章控制对象概述1 皮带运输机用途、基本组成结构及工作过程1 1.1.1 皮带运输机用途1 1.1.2 皮带运输机组成及工作原理1 控制对象对控制系统的要求1 本课题应完成的设计工作2 第2章控制方案论证3 继电器控制方案 3 单片机控制方案 3 PLC控制方案4 结论4 第3章控制系统硬件设计 5 电机及元件选择5 电路设计 5 3.2.1 主电路设计5 3.2.2 PLC I/O 接线图设计6 第4章控制系统程序设计7 程序组成部分7 主程序7 公用子程序8 手动公用子程序8 自动公用子程序9 M1电机故障子程序 10 M2电机故障子程序 11 M3电机故障子程序 12 M4电机故障子程序 12 第5章程序调试 13 第6章体会心得 14 附录15 参考资料18 第1章控制对象概述 皮带运输机用途、基本组成结构及工作过程 1.1.1 皮带运输机用途 皮带输送机可以广泛应用于现代化的各种工业企业中,露天采矿场及选矿厂中,在矿山的井下巷道、矿井地面运输系统中,皮带输送机都得到了广泛应用,水平运输或倾斜运输,皮带输送机的使用都非常方便。皮带输送机是以连续摩擦驱动的方式用来运输物料。那么皮带输送机的主要是由输送带和驱动装置组成的。皮带输送机具有输送量大、结构简单优点,它广泛地应用在矿山、冶金、煤炭等部门,用来输送松散物料或成件物品,根据输送工艺要求,可以单台输送,也可多台组成或与其他输送设备组
成水平或倾斜的输送系统,以满足不同布置型式的作业线需要。 皮带运输机的驱动装置由单个或多个驱动滚筒驱动,驱动电机也可以是单个电机或多个电机驱动。一般驱动装置包括电动机、减速机、液力偶合器、制动器或逆止器等组成。偶合器的作用是改善皮带运输机的启动性能。制动器和逆止器是为了防止当皮带运输机停机时皮带向下滑动。 皮带运输机是散料连续运输机械,是应用于短距离连续运输的的重要机械设备。 1.1.2 皮带运输机组成及工作原理 皮带输送机的主要是由输送带和驱动装置组成的。主要介绍驱动装置即四台电动机的运动情况。皮带运输机由4台皮带机组成,4台皮带机分别用4台电动机(M1~M4)拖动。皮带输送机是以连续摩擦驱动的方式用来运输物料,通过控制4台电动机的运动,来控制传输物料。 控制对象对控制系统的要求 皮带运输机由4台皮带机组成,4台皮带机分别用4台电动机(M1~M4)拖动,如图1所示。 M1 M2 M3 M4 图1 皮带运输机系统示意图 皮带运输机的工作过程如下: (1)启动时先起动最末一台皮带机,经过5S 延时,再依次起动其它皮带机: 1234555M M M M S S S ?→??→??→? (2)停止时应先停止第一台皮带机(M1),待料运送完毕后再依次停止其它皮带机: 4321555M M M M S S S ?→??→??→? (3)当某台皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机后面的皮带机待料运完后才停止。例如当M2故障时,M1、M2应立即停,经过5S 延时后,M3停,再过5S 后M4停。 本课题应完成的设计工作 (1)设计和绘制电气控制原理图或PC I/O 接线图、功能表图和梯形图 编写指令程序清单。 (2)选择电气元件,编制电气元件明细表。 (3)设计操作面板电器元件布置图。 (4)上机调试程序 (5)编写设计说明书
皮带运输机选型设计
胶带输送机选型设计 一、运煤系统 12K区、二采区1268工作面、1258工作面运煤系统由12K运煤巷(765m,-6°~-15°)至226运煤巷(480m,10°~12°)到226(170m,-5°~-13°)运煤联巷进入二采区改造煤仓,再经3t底卸式煤车由10t电机车牵引至地面卸载站。12K区运煤系统全部选用皮带运输。 (一)、12k区运煤巷胶带运输机选型设计 1、设计依据 ①设计运输生产率:Q s=400t/h; 设计综采工作面最大生产能力Q=400t/h。故设计胶带的运输生产率取值应与综采生产能力配套,即设计运输生产率:Q s=400t/h。 ②运输距离:L=650米; ③运输安装角度:β=-6°~-15°(此处计算时取值为-12°); ④货载散集密度:ρ=0.8t/m3~1.0t/m3;(此处计算时取值为1.0); ⑤煤在胶带上堆积角:α=30°。 2、输送能力计算 Q=3.6qv=3.6Aρv=KB2ρvc 式中:q——每米胶带货载质量q=Aρ,kg/m; A——胶带上货载断面积,取0.124㎡; v——胶带运行速度,取2m/s; K——货载断面因数; B—胶带宽度,(暂定)B=1m;
c—倾角运输因数,取c=0.9; Q =KB2ρvc=3.6×0.124㎡×1×1000/m3×2m/s×0.9 =803.52t/h Q=803.52t/h> Q s=400t/h;故1米平皮带在2米/秒的运行速度上其输送能力能够满足设计输送能力。 3、胶带宽度计算 求出胶带最小宽度B=533,暂取B=1000; 宽度校核: B≥2max+200,式中max为原煤最大块度尺寸不大于400; 则B≥2×400+200=1000 故暂定的B=1000的胶带宽度满足要求。 4、胶带运行阻力计算: 胶带及物料产生的运行阻力计算:逐点计算 F1=Lωg(cosa2q0+cosaq+q1+q2) 式中:L——胶带长度,m;
皮带运输机传动装置设计计算说明书
机械设计基础课程设计2资料 设计题目:皮带运输机传动装置 学生姓名 学院名称 专业 学号 指导教师 内装资料:1计算说明书 1 份 2设计装配图 1 张 3 零件图 1 张 4 设计草图 1 张 2013年8月28日
机械设计基础课程设计2 计算说明书 设计题目:皮带运输机传动装置 学生姓名 学院名称 专业 学号 指导教师 2013年8月28日
《《机械设计基础课程设计2》任务书 编号2—1— 3 姓名专业年级班级 设计完成日期指导教师 设计题目:皮带运输机传动装置 1—电动机2—三角带传动 3—圆柱齿轮减速器 4—开式齿轮传动 5—运输带 6—滚筒 原始数据 设计工作量:设计说明书1份,减速器装配图1张,减速器零件图1 张
目录 一、传动方案的拟定及说明 (3) 二、电动机的选择 (3) 三、传动比的分配 (4) 1、总传动 (4) 2、各级传动比 (4) 四、传动件运动参数及动力参数计算 (4) 1、计算各轴转速 (4) 2、计算各轴的输入功率 (4) 3、计算各轴扭矩 (4) 五、传动零件的设计计算 (5) 1、皮带轮传动的设计计算 (5) 2、开式齿轮传动计算 (6) 3、减速器内齿轮传动计算 (8) 六、校验总传动比 (10) 七、轴的设计与强度校核计算 (10) 1、输入轴的尺寸设计 (10)
2、输出轴的尺寸设计 (11) 3、输出轴强度校核 (12) 八、输出轴轴承的寿命计算 (14) 九、键的强度校核计算 (14) 1、减速器内大齿轮联接键强度校验 (14) 2、减速器外小齿轮联接键强度校验 (14) 十、减速器的部分结构尺寸 (15) 1、箱体结构设计 (15) 2、箱体附件的设计选择 (16) 十一、润滑与密封 (16) 十二、参考资料目录 (16)
PLC控制皮带运输机的设计
南京化工职业技术学院 毕业论文设计 题目: PLC控制皮带运输机的设计 姓名: 所在系部: 班级名称: 学号: 指导老师: 2013年 2 月25日
目录 摘要 ................................................................... III 第1章 PLC概述.. (1) 1.1 PLC的发展 (1) 1.2 PLC的定义 (1) 1.3 PLC的特点 (1) 1.3.1高可靠性 (2) 1.3.2应用灵活、使用方便 (2) 1.3.3控制过程的编程语言简单 (2) 1.4 PLC组成 (3) 1.5 PLC的工作原理 (4) 1.6 PLC的分类 (5) 1.6.1小型PLC (5) 1.6.2中型PLC (5) 1.6.3大型PLC (5) 1.7 PLC的主要技术指标 (5) 1.8 PLC控制系统设计的基本内容及原则 (6) 1.8.1 PLC控制系统设计的基本内容 (6) 1.8.2在设计PLC控制系统时.应遵循以下基本原则 (7) 第2章皮带传输机集中控制系统的结构及工作过程 (8) 1.1皮带传输机的结构 (8) 1.2 皮带运输机的电气控制要求 (9) 1.3 皮带运输机的总体方案确定 (9) 第3章控制系统的硬件电路设计 (11) 3.1 PLC选型 (11) 3.1.1信号的确定 (11) 3.1.2 PLC型号确定 (11) 3.2 I/O点分配 (13) 3.3 PLC外围硬件电路的设计与硬件电路图 (13)
3.3.1 PLC外围硬件电路图 (13) 3.3.2硬件电路主电路图及说明 (14) 3.4硬件电路的接线要求 (15) 第4章控制系统的软件设计 (16) 3.1软件设计思路 (16) 3.2程序流程图与梯形图及说明 (16) 第5章抗干扰的设计 (19) 4.1设备选型 (19) 4.2 综合抗干扰设计 (19) 第5章系统调试 (20) 总结 (21) 致谢 (22) 参考文献 (23)
皮带输送机设计计算对比研究详细版
文件编号:GD/FS-5757 (安全管理范本系列) 皮带输送机设计计算对比 研究详细版 In Order To Simplify The Management Process And Improve The Management Efficiency, It Is Necessary To Make Effective Use Of Production Resources And Carry Out Production Activities. 编辑:_________________ 单位:_________________ 日期:_________________
皮带输送机设计计算对比研究详细 版 提示语:本安全管理文件适合使用于平时合理组织的生产过程中,有效利用生产资源,经济合理地进行生产活动,以达到实现简化管理过程,提高管理效率,实现预期的生产目标。,文档所展示内容即为所得,可在下载完成后直接进行编辑。 皮带机技术设计主要是通过理论上的分析计算,确定合理的运行参数,选出满足生产要求的输送机各个部件,或者对选定的部件参数进行验算,完成输送线路的宏观设计。设计计算一般采用概算法或逐点法进行计算,得到驱动滚筒轴功率、电动机功率和各特性点张力,为部件选型打下基础。 在皮带机初步设计阶段,要计算出传动滚筒轴功率、电动机功率以及各特性点张力。通常采用概算法或逐点法计算上述数据,前者比较粗略,后者较精细。以某1米带宽固定带式输送机设计为例(布置图见下图),其采用了头部传动、尾部改向、中部重锤
拉紧的结构方式,设计时先后采用了两种算法,最后对最终结果进行比较,收到了较好的设计效果。 概算法计算功率和各特性点张力 在初步设计阶段,确定原始条件:原煤比重γ、物料粒度X max、输送量Q=600t/h、倾角β=16°, 头部滚筒到尾部滚筒的水平中心距 Lh=162.2m, 垂直拉紧滚筒中心线距头部滚筒的水平距离Lh1=135.50m 托辊布置间距为:上托辊间距 l0=1.2m 下托辊间距l0'=3.0m 导料槽长度根据卸料情况布置长度 L=12.0m 预选带速v=2.0m/s后,算出带宽B=1m。
PLC皮带运输机控制系统课程设计
目录 第1章控制对象概述 (1) 1.1 皮带运输机用途、基本组成结构及工作过程 (1) 1.1.1 皮带运输机用途 (1) 1.1.2 皮带运输机组成及工作原理 (1) 1.2 控制对象对控制系统的要求 (1) 1.3 本课题应完成的设计工作 (2) 第2章控制方案论证 (3) 2.1 继电器控制方案 (3) 2.2 单片机控制方案 (3) 2.3 PLC控制方案 (4) 2.4 结论 (4) 第3章控制系统硬件设计 (5) 3.1 电机及元件选择 (5) 3.2 电路设计 (5) 3.2.1 主电路设计 (5) 3.2.2 PLC I/O 接线图设计 (6) 第4章控制系统程序设计 (7) 4.1 程序组成部分 (7) 4.2 主程序 (7) 4.3 公用子程序 (8) 4.4 手动公用子程序 (8) 4.5 自动公用子程序 (9) 4.6 M1电机故障子程序 (10) 4.7 M2电机故障子程序 (11) 4.8 M3电机故障子程序 (12) 4.9 M4电机故障子程序 (12) 第5章程序调试 (13) 第6章体会心得 (14) 附录 (15) 参考资料 (18)
第1章控制对象概述 1.1 皮带运输机用途、基本组成结构及工作过程 1.1.1 皮带运输机用途 皮带输送机可以广泛应用于现代化的各种工业企业中,露天采矿场及选矿厂中,在矿山的井下巷道、矿井地面运输系统中,皮带输送机都得到了广泛应用,水平运输或倾斜运输,皮带输送机的使用都非常方便。皮带输送机是以连续摩擦驱动的方式用来运输物料。那么皮带输送机的主要是由输送带和驱动装置组成的。皮带输送机具有输送量大、结构简单优点,它广泛地应用在矿山、冶金、煤炭等部门,用来输送松散物料或成件物品,根据输送工艺要求,可以单台输送,也可多台组成或与其他输送设备组成水平或倾斜的输送系统,以满足不同布置型式的作业线需要。 皮带运输机的驱动装置由单个或多个驱动滚筒驱动,驱动电机也可以是单个电机或多个电机驱动。一般驱动装置包括电动机、减速机、液力偶合器、制动器或逆止器等组成。偶合器的作用是改善皮带运输机的启动性能。制动器和逆止器是为了防止当皮带运输机停机时皮带向下滑动。 皮带运输机是散料连续运输机械,是应用于短距离连续运输的的重要机械设备。 1.1.2 皮带运输机组成及工作原理 皮带输送机的主要是由输送带和驱动装置组成的。主要介绍驱动装置即四台电动机的运动情况。皮带运输机由4台皮带机组成,4台皮带机分别用4台电动机(M1~M4)拖动。皮带输送机是以连续摩擦驱动的方式用来运输物料,通过控制4台电动机的运动,来控制传输物料。 1.2 控制对象对控制系统的要求 皮带运输机由4台皮带机组成,4台皮带机分别用4台电动机(M1~M4)拖动,如图1所示。
带式输送机选型设计
目录 1设计方案 (1) 2带式输送机的设计计算 (1) 2.1 已知原始数据及工作条件 (1) 2.2 计算步骤 (2) 2.2.1 带宽的确定: (2) 2.2.2输送带宽度的核算 (5) 2.3 圆周驱动力 (5) 2.3.1 计算公式 (5) 2.3.2 主要阻力计算 (6) 2.3.3 主要特种阻力计算 (8) 2.3.4 附加特种阻力计算 (9) 2.3.5 倾斜阻力计算 (10) 2.4传动功率计算 (10) P)计算 (10) 2.4.1 传动轴功率( A 2.4.2 电动机功率计算 (10) 2.5 输送带张力计算 (11) 2.5.1 输送带不打滑条件校核 (11) 2.5.2 输送带下垂度校核 (12) 2.5.3 各特性点张力计算 (13) 2.6 传动滚筒、改向滚筒合张力计算 (14) 2.6.1 传动滚筒合张力计算 (14) 2.6.2 改向滚筒合张力计算 (16) 2.7 初选滚筒 (17) 2.8 传动滚筒最大扭矩计算 (18) 2.9拉紧力计算 (18) 2.10绳芯输送带强度校核计算 (18) 3技术可行性分析 (18) 4经济可行性分析 (19) 5结论 (20)
带式输送机选型设计 1、设计方案 将现主平硐延伸与一水平皮带下山相连,在二水平皮带下山机头重新布置一条运输联络巷与一水平皮带下山搭接。 平硐、一水平皮带下山采用一条皮带,取消了原二水平皮带运输斜巷、+340煤仓、+347煤仓、+489煤仓。改造后巷道全长1783m,其中平硐+4‰,1111m,下山 12.5°,672米。 1-1皮带改造后示意图 2、带式输送机的设计计算 2.1 已知原始数据及工作条件 带式输送机的设计计算,应具有下列原始数据及工作条件资料 (1)物料的名称和输送能力: (2)物料的性质: 1)粒度大小,最大粒度和粗度组成情况; 2)堆积密度; 3)动堆积角、静堆积角,温度、湿度、粒度和磨损性等。 (3)工作环境、露天、室内、干燥、潮湿和灰尘多少等; (4)卸料方式和卸料装置形式; (5)给料点数目和位置; (6)输送机布置形式和尺寸,即输送机系统(单机或多机)综合布置形式、地形条件和供电情况。输送距离、上运或下运、提升高度、最大倾角等; (7)装置布置形式,是否需要设置制动器。
皮带输送机设计计算对比研究(新版)
皮带输送机设计计算对比研究 (新版) Safety management is an important part of enterprise production management. The object is the state management and control of all people, objects and environments in production. ( 安全管理 ) 单位:______________________ 姓名:______________________ 日期:______________________ 编号:AQ-SN-0053
皮带输送机设计计算对比研究(新版) 皮带机技术设计主要是通过理论上的分析计算,确定合理的运行参数,选出满足生产要求的输送机各个部件,或者对选定的部件参数进行验算,完成输送线路的宏观设计。设计计算一般采用概算法或逐点法进行计算,得到驱动滚筒轴功率、电动机功率和各特性点张力,为部件选型打下基础。 在皮带机初步设计阶段,要计算出传动滚筒轴功率、电动机功率以及各特性点张力。通常采用概算法或逐点法计算上述数据,前者比较粗略,后者较精细。以某1米带宽固定带式输送机设计为例(布置图见下图),其采用了头部传动、尾部改向、中部重锤拉紧的结构方式,设计时先后采用了两种算法,最后对最终结果进行比较,收到了较好的设计效果。
概算法计算功率和各特性点张力 在初步设计阶段,确定原始条件:原煤比重γ、物料粒度Xmax、输送量Q=600t/h、倾角β=16°, 头部滚筒到尾部滚筒的水平中心距Lh =162.2m, 垂直拉紧滚筒中心线距头部滚筒的水平距离Lh1 =135.50m 托辊布置间距为:上托辊间距l0 =1.2m下托辊间距l0' =3.0m 导料槽长度根据卸料情况布置长度L=12.0m 预选带速v=2.0m/s后,算出带宽B=1m。然后初选聚酯帆布带EP-200,6层,计算输送带单位长度的质量q0 =16.28kg/m 1.1.选择托辊 根据运行条件及手册相关参数,先初选托辊型号,计算承载及
皮带输送机选型设计
皮带输送机选型设计 胶带输送机的选型计算一、概述 初步选型设计带式输送机,已给出下列原始资料: 1)输送长度L 7m 2)输送机安装倾角4 3)设计运输生产率Q 350t /h 4)物料的散集密度 2.25t/m3 5)物料在输送机上的堆积角38 6)物料的块度 a 200mm 计算的主要内容为: 1)运输能力与输送带宽度计算; 2)运行阻力与输送带张力计算; 3)输送带悬垂度与强度的验算;
4)牵引力的计算及电动机功率确定。 二、原始资料与数据 1 )小时最大运输生产率为A= 350吨/小时; 2)皮带倾斜角度:4 3)矿源类别:电炉渣; 4)矿石块度:200 毫米; 5)矿石散集容重 2.25 t/m 3; 6)输送机斜长8m; 2
i 3 三. 胶带宽度的计算 选取胶带速度v-0.4米/秒暑按堆积角x ? = 3S 得K 乍00;得 C = 0.99 考虑降尘,货载块度及胶带的来源,选用1400mm 宽的尼龙芯胶 带*单位长度重量q =25,65kg/m, 胶带厚度d =17 mm 四. 胶带运行阻力与张力的计算 K 直线段阻力的计算 4-1段阻力W4-1为 F 7jt =(? + +^i )L J?,cos/? + (? + ^n )L sin /? = (238L94 + 251.37 +196)x 7 x 0.04 x 0,997 + (2381.94 + 25137) x7x 0.07 = 2080.91 沖 式中:q —每米长的胶带上的货载重量N 加, 238L94JV/m 哲一一每米长的胶带自重25L37N 加 也-一为折算到每米长度上的上托辗转动部分的重 量 N / m = 22 x9.8/l,l = h 一一上托辗间距册,一般取1小叫 取3 皿 所以带宽 式中 G ——为每组上托辐转动部分重量何,2畑皿 =R86.36nim
皮带输送机选型设计
胶带输送机的选型设计 1概述 带式输送机的选型设计有两种,一种是成套设备的选用,这只需验算设备用于具体条件的可能性,另一种是通用设备的选用,需要通过计算选着各组成部件,最后组合成适用于具体条件下的带式输送机。 设计选型分为两步:初步设计和施工设计。在此,我们仅介绍初步设计。 初步选型设计带式输送机,一般应给出下列原始资料: 1)输送长度L,m 2)输送机安装倾角b ,(°); 3)设计运输生产率Q, t/h ; 4)物料的散集密度p,t/m1 2 3; 5)物料在输送机上的堆积角9,(°); 6)物料的块度a,mm 计算的主要内容为: 1)运输能力与输送带宽度计算; 2)运行阻力与输送带张力计算; 3)输送带悬垂度与强度的验算; 4)牵引力的计算及电动机功率确定。 带式输送机的优点是运输能力大,而工作阻力小,耗电量低,约为刮板输送机耗电量的1/3~1/5 o因在运输过程中物料与输送带一起移动,故磨损小,物料的破碎性小。由于结构简单,既节省设备,又节省人力,故广泛应用于我国国民经济的许多工业部门。国内外的生产实践证明,带式输送机无论在运送能力方面,还是在经济指标方面,都是一种较先进的运送设备。 目前在大多数矿井中,主要有钢丝绳芯带式输送机和钢丝绳牵引带式输送机两种类型,它们担负着煤矿生产采区乃至整个矿井的主运输任务。由于其铺设距离较长且输送能力较大,故称其为大功率带式输送机。在煤矿生产中,还有装机功 1 矿井生产能力160万吨/年,以最大的生产能力为设计依据; 一160兀104 2 矿井小时最大运输生产率为A= 1.25 =476吨/小时; 300X4
率较小的通用带式输送机,这些带式输送机在煤矿中也起着不可缺少的作用。2原始数据与资料
皮带输送机设计毕业设计
毕业设计 课题名称:DT-(Ⅰ)皮带输送机设计(输送带部分)
目录 摘要及关键词................................................. .. (3) 前言......................................................... .. (3) 一、传动系统的方案设计.......................................... .. (4) 1)、对传动方案的要求..................................... . . (4) 2)、拟定传动方案..................................... ...... .. 4 二、带式输送机的设计............................................... (4) 1)、确定带速V.............................................. . .. .. 4 2)、确定带宽B............................................... . (4) 3)求圆周力 (5) 4)求各个点的张力 (6) 5)校核重度 (7) 6.校核胶带安全系数 (7) 7)拉紧装置设计 (7) 三、电动机的选用 (7) 1)电动机容量的选择................................................ .7 *2)传动比的分配 (8) *3)各轴转速、功率和转矩的计算 (9) *4)带的设计 (10) *四、齿轮的设计..................................................... .13 *五、减速器中轴的设计.................................................. . 20 六、传动滚筒内轴的设计................................................. . 20 1)选择轴的材料确定许用应力 (20) 2)按扭转强度估算轴径 (20) 3)设计轴的结构并绘制草图 (20) 4)按弯扭合成强度校核轴径 (21) 5)轴的刚度校核 22 七、改向滚筒内轴的设计 (22) 1)选择轴的材料确定许用应力 (23) 2)确定各轴段的长度 (23) 3)按强度设计轴径 (23) 4)设计轴的结构并绘制草图 (24) 5)轴的刚度校核 24 八、滚动轴承的选择(传动滚筒)......................................... .25 九、滚动轴承的选择(改向滚筒) (25) 十、键和联轴器的选择 (25) 1)传动滚筒上联轴器的选择 (26) 2)传动滚筒上键的选择 (26) 3)传动滚筒轴内键联接的选择........................................ . 26 4)改向滚筒轴内键联接的选择 (26) *十一、滚动轴承的润滑 (27) 结论 (27) 结束语 (27)
PLC带式运输机课程设计
可编程序控制器 课程设计报告 学校:哈尔滨理工大学荣成学院院系:电气信息系 专业班级:XXXX 学号:XXXXXXX 姓名:XXXXXXX
皮带运输机PLC控制系统 一、任务要求 粮库中多用带式运输机将一个粮库的粮食运往另一个粮库。当距离过长时,多采用多台运输机接力运行。按运粮要求,启动时,第一台运输机先启动运行,5s后,第二台运输机再启动运行,再经5s后,第二台运输机再启动运行。停车时,第三台运输机先停止运行,5s 后,第二台运输机停止运行,再经5s后,第一台运输机停止运行,即三台运输机顺序启动,逆序停止。使用PLC程序实现上述功能。画出PLC硬件接线图。输出输入点分配及程序清单及注释。 二、系统总体方案 (1) 按照I/O接线图完成接线; (2) 程序块全部编译; (3) 通信; (4) 下载; (5) 在没有错误的情况下运行,同时观察显示灯的状态,运行后,开启开始程序块状态监控; (6) 如果传送带的显示灯没有按照要求亮,通过程序块状态监控进行查错; (7) 若没有错误,实验成功。 在此基础上重复以上实验过程,直道实验成功为止。
三、PLC型号选择及其他PLC元器件分配 1.PLC的选择 PLC的选择是S7-200西门子。CPU类型为CPU224。 2.I/O接口分配 输入信号输出信号名称代号输入点名称代号输入点起点按钮SB1 I0.0 运输机1 M1 Q0.1 停止按钮SB2 I0.1 运输机2 M2 Q0.2 运输机3 M3 Q0.3 四、PLC控制系统硬件接线图 起点按钮 停止按钮 I0.0 I0.1 第一台运输机 第二台运输机 第三台运输机Q0.1 Q0.2 Q0.3
- 机械课程设计说明书(带式运输机传动装置)
- 机械课程设计说明书(带式运输机传动装置)
- 推荐-课程设计皮带运输机传动装置 精品
- PLC皮带运输机课程设计-
- PLC皮带运输机课程设计
- PLC课设 四条皮带运输机的传送系统
- 皮带运输机传输系统
- PLC带式运输机课程设计
- plc皮带运输机课程设计-
- PLC带式运输机课程设计
- 带式输送机传动装置课程设计
- 皮带运输机PLC控制系统
- 机械课程设计带式运输机传动装置
- PLC课设 四条皮带运输机的传送系统
- PLC课设 四条皮带运输机的传送系统
- 机械设计课程设计-皮带运输机传动装置二级减速箱设计说明书
- 皮带运输机课程设计任务书和说明书新模板
- PLC课设四条皮带运输机的传送系统
- 皮带运输机传动装置设计计算说明书
- 机械设计课程设计 皮带运输机传动装置