用相位法测声速

用相位法测声速
【实验目的】
1、学习用相位法测量空气中的声速。
2、了解空气中的声速与温度的关系。
3、提高声学、电磁学等不同类型仪器的综合使用能力。
4、了解换能器的原理及工作方式。
【实验仪器】
综合声速测定仪、综合声速测定仪信号源、双综示波器。
【实验原理】
1、 声波的波速
测量声速一般的方法是在给定声音信号的频率f 情况下,测量声信号的波长λ,由 公式u f λ=,计算出声速u 。
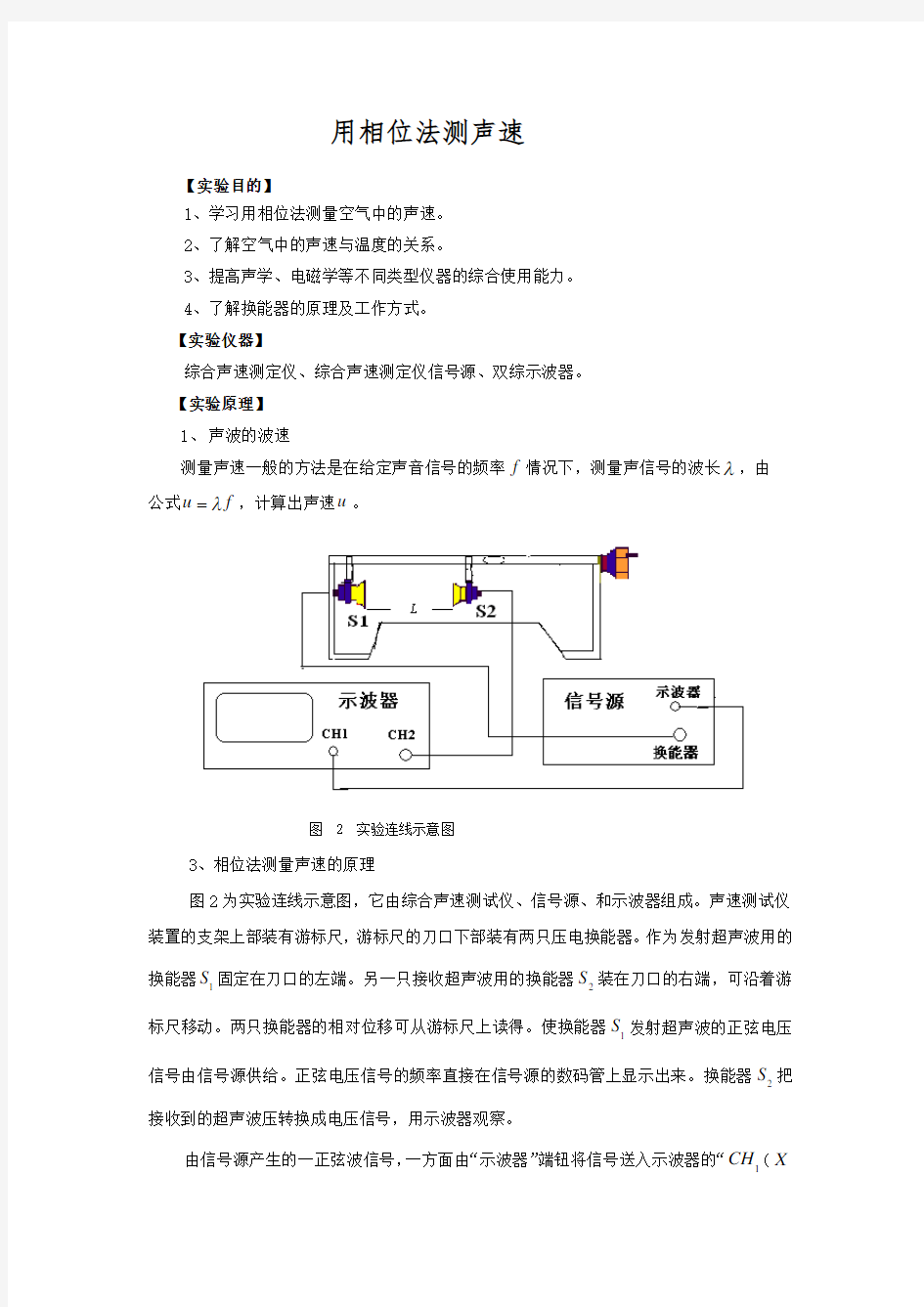
图 2 实验连线示意图
3、相位法测量声速的原理
图2为实验连线示意图,它由综合声速测试仪、信号源、和示波器组成。声速测试仪装置的支架上部装有游标尺,游标尺的刀口下部装有两只压电换能器。作为发射超声波用的换能器1S 固定在刀口的左端。另一只接收超声波用的换能器2S 装在刀口的右端,可沿着游标尺移动。两只换能器的相对位移可从游标尺上读得。使换能器1S 发射超声波的正弦电压信号由信号源供给。正弦电压信号的频率直接在信号源的数码管上显示出来。换能器2S 把接收到的超声波压转换成电压信号,用示波器观察。
由信号源产生的一正弦波信号,一方面由“示波器”端钮将信号送入示波器的“1CH (X
轴)”,另一方面由“换能器”端钮将信号送入综合测定仪的“1S ”,再传送到“2S ”,然后送入示波器的“2CH (Y 轴)”。在示波器上将显示出两个频率相等、振动方向相互垂直、位相差恒定的利萨如图形。由于两信号到达时间不同(或存在有波程差)而产生相位差。
2L
?πλ=
相位差不同,利萨如图形也不同。即
11sin()X A t ω?=+
22sin()Y A t ω?=+
合成后的方程为
2222121221212
2cos()sin ()X Y XY A A A A ????+--=- 这是一个稳定的椭圆利萨如图形。
当210??-=时
22221212
20X Y XY A A A A +-= 或 12
X Y A A = 这是一直线方程。即两者相位相同或相位差为2π的整数倍时,合成为一条直线。
当212k λ
??π-=±时
22
2212
1X Y A A +=
合成后的利萨如图形为正椭圆。可见利萨如图形随相位差的变化而改变。当连续移2S ,增大1S 与2S 之间的距离L 时,利萨如图将从直线到椭圆再到直线变化,如图3所示。当L 改变一个波长时,即两信号的相位差改变2π时,图形就会重复出现同样斜率的直线。如图3所示。这样就可以测量出波长的长度。
图 3 不同相位差对应的利萨如图
【实验步骤】
1、按图2 所示接线,将换能器间距离调整到约50mm 。信号源输出频率为0f ,大约为36000Z H 。
2、打开示波器电源,预热5分钟,待出现一条绿色的水平线。将开关置于“CH1”,显示X 方向的正弦波形,然后将开关置于”CH2”,显示Y 方向的波形。应使两者的幅度大致相等。幅度不应过大。
3、将示波器的旋钮旋到X Y ?位置,示波器出现“椭圆”图形。将图形调至中间。旋转声速测定仪上的手轮,看图形的变化规律,看是否是从左到右再从右到左变化。
4、将利萨如图形调成一条直线,并记住直线的位置。打开自动记录仪的电源开关,并清零。
5、转动声速测定仪上的手轮,逐步增大换能器间距,观察相应的李萨如图形,直到图形再回到开始的直线位置时,记录下记录仪上的读数,并记录信号源上的频率。
6、重复步骤5。记录8组数据,填在相应的表内。
五、数据记录
六、数据处理
计算平均波长 1234
4
λλλλλ+++=
波长绝对不确定度 λ?=
平均频率 8
1n n f f
==∑
频率绝对不确定度
f ?=
计算平均声速 u f λ= 相对不确定度
u E =波长绝对不确定度
u u E u ?= 波速的完整表示
(/)u u u m s =±?
实验8 声速的测定
实验8 声速的测定 [实验目的] 1. 了解超声换能器的工作原理和功能。 学习不同方法测定声速的原理和技术。 2. 熟悉测量仪和示波器的调节使用。 3. 测定声波在空气及水中的传播速度。 [实验仪器] 1.ZKY —SS 型声速测定实验仪 一台 2.双踪示波器 一台 [仪器介绍] (示波器的使用见教材) 实验仪由超声实验装置(换能器及移动支架组合)和声速测定信号源组成。 超声实验装置中发射器固定,摇动丝杆摇柄可使接收器前后移动,以改变发射器与接收器的距离。丝杆上方安装有数字游标尺(带机械游标尺),可准确显示位移量。整个装置可方便的装入或拿出水槽。 超声实验装置(换能器及移动支架组合) 声速测定信号源
声速测定信号源面板上有一块LCD显示屏用于显示信号源的工作信息;还具有上下、左右按键,确认按键、复位按键、频率调节旋钮和电源开关。上下按键用作光标的上下移动选择,左右按键用作数字的改变选择,确认按键用作功能选择的确认以及工作模式选择界面与具体工作模式界面的交替切换。 同时还有超声发射驱动信号输出端口(简称TR,连接到超声波发射换能器)、超声发射监测信号输出端口(简称MT,连接到示波器显示通道1)、超声接收信号输入端口(简称RE,连接到超声波接收换能器)、超声接收信号监测输出端口(简称MR,连接到示波器显示通道2)。 声速测定信号源具有选择、调节、输出超声发射器驱动信号;接收、处理超声接收器信号;显示相关参数:提供发射监测和接收监测端口连接到示波器等其它仪器等功能。 开机显示欢迎界面后,自动进入按键说明界面。按确认键后进入工作模式选择界面,可选择驱动信号为连续正弦波工作模式(共振干涉法与相位比较法)或脉冲波工作模式(时差法)。 选择连续波工作模式,按确认键后进入频率与增益调节界面;在该界面下将显示输出频率值;发射增益档位,接收增益档位等信息,并可作相应的改动。[实验原理] 声波是一种在弹性媒质中传播的机械波。声波在媒质中传播时,声速、声衰减等诸多参量都和媒质的特性与状态有关,通过测量这些声学量可以探知媒质的特性及状态变化。例如,通过测量声速可求出固体的弹性模量;气体、液体的比重、成分等参量。 在同一媒质中,声速基本与频率无关,例如在空气中,频率从20赫兹变化到8万赫兹,声速变化不到万分之二。由于超声波具有波长短,易于定向发射,不会造成听觉污染等优点,我们通过测量超声波的速度来确定声速。超声波在医学诊断,无损检测,测距等方面都有广泛应用。 声速的测量方法可分为两类: 第一类方法是直接根据关系式V=S/t,测出传播距离S和所需时间t后即可算出声速,称为“时差法”,这是工程应用中常用的方法。 第二类方法是利用波长频率关系式V=f·λ,测量出频率f和波长λ来计算出声速,测量波长时又可用“共振干涉法”或“相位比较法”,本实验用三种方法测量气体和液体中的声速。 本实验采用压电陶瓷超声换能器将实验仪输出的正弦振荡电信号转换成超声振动。当把电信号加在发射端时,换能器端面产生机械振动(逆向压电效应)并在空气中发出声波。当声波传递到接收端时,激发起端面振动,又会在产生相应的电信号输出(正向压电效应)。每一只换能器都有其固有的谐振频率,换能器只有在其谐振频率,才能有效的发射(或接收)。实验时用一个换能器作为发射器,另一个作为接收器,二换能器的表面互相平行,且谐振频率匹配。
相位法激光测距的理论设计综合最新版
相位法激光测距的设计 电子工程学院 詹雪娇 2017110459 史歌2017110481
第一章引言 激光,是一种自然界原本不存在的,因受激而发出的具有方向性好、亮度高、单色性好和相干性好等特性的光。物理学家把产生激光的机理溯源到1917年爱因斯坦解释黑体辐射定律时提出的假说,即光的吸收和发射可经由受激吸收、受激辐射和自发辐射三种基本过程[1]。 所谓激光技术,就是探索开发各种产生激光的方法以及探索应用激光的这些特性为人类造福的技术的总称。30多年来,激光技术得到突飞猛进的发展,利用激光技术不仅研制了各个特色的多种多样的激光器,而且随着激光应用领域不断拓展,形成了激光唱盘唱机、激光医疗、激光加工、激光全息照相、激光照排印刷、激光打印以及激光武器等一系列新兴产业。激光技术的飞速发展,使其成为当今新技术革命的先锋! 激光和普通光的根本不同在于它是一种有很高光子简并度的光。光子简并度可以理解为具有相同模式(或波型、位相、波长)的光子数目,即具有相同状态的光子数目。这些特性使激光具有良好的准直性及非常小的发散角,使仪器可进行点对点的测量,适应非常狭小和复杂的测量环境。激光测距仪就是利用激光良好的准直性及非常小的发散角度来测量距离的一种仪器。激光在A、B 两点间往返一次所需时间为t, 则A、B 两点间距离D 可表示为: D = c·t /2,式中, c为光在大气中传播的速度。由于光速极快, 对于一个不太大的D 来说, t是一个很小的量。如:假设D =15km, c = 3 ×105 km / s,则t = 5 ×10- 5 s。由测距公式可知,如何精确测量出时间t的值是测距的关键。 由于测量时间t的方法不同,便产生了两种测距方法:脉冲测距和相位测距。其中相位测距更加精确[1]。
激光检测技术研究现状与发展趋势
激光检测技术研究现状与发展趋势 提要:激光检测学科发展现状在光电检测领域,利用光的干涉、衍射和散射进行检测已经有很长的历史。由泰曼干涉仪到莫尔条纹,然后到散斑,再到全息干涉,出现了一个个干涉场,物理量(如位移、温度、压力、速度、折射率等)的测量不再需要单独测量,而是整个物理量场一起进行测量。自从激光出现以后,电子学领域的许多探测方法(如外差、相关、取样平均、光子计数等)被引入,使测量灵敏度和测量精度得到大大提高。用激光检测关键技术(激光干涉测量技术、激光共焦测量技术、激光三角测量技术)实现的激光干涉仪、激光位移传感器等,可以完成纳米级非接触测量。可以说,超精密加工技术将随着高精密激光检测技术的发展而发展;在此基础上,提出了激光测量需解决的关键技术及今后的发展方向。 1.测量原理 1.1激光测距原理 先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。
1.2激光测位移原理 激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。 2.激光测量系统的应用 激光功率和能量是描述激光特性的两个基本参数,激光功率计和能量计是最常用的两类激光测量仪器。随着激光技术的不断发展,对激光测试技术和测量仪器提出了更高要求。由于调Q和锁模激光的出现和应用,要求测量的激光功率已从毫瓦、瓦、千瓦、兆瓦直到千兆瓦以上。激光能量也从毫焦尔逐渐跨过千焦尔。脉冲激光的持续时间也由毫秒、微秒、毫微秒、而缩短至微微秒量级。光谱范围也从紫外、可见、红外扩展到近毫米波段。激光精密测量和某些生物医学方面的研究和应用(如眼科治疗、细胞手术器等)的发展,对激光测量的精度也提出了非常高的要求。 2.1激光非球面检测技术 长期以来,非球面检测技术一直制约着非球面制造精度的提高,尤其对于高精度非球面的检测。规的非球面检测方法如刀口阴影法、激光数字干涉法及接触式光栅测量法等,对于检测工件表面来说都有一定的局限性。原子力显微镜是利用纳米级的探针固定在可灵敏操控的微米级尺度的弹性悬臂上,当针尖很靠近样品时,其顶端的原子与
声速的测量
物理实验报告 一、【实验名称】 超声波声速的测量 二、【实验目的】 1、了解声速的测量原理 2、学习示波器的原理与使用 3、学习用逐差法处理数据 三、【仪器用具】 1、SV-DH-3型声速测定仪段 2、双踪示波器 3、SVX-3型声速测定信号源 四、【仪器用具】 1.超声波与压电陶瓷换能器 频率20Hz-20kHz的机械振动在弹性介质中传播形成声波,高于20kHz称为超声波,超声波的传播速度就是声波的传播速度,而超声波具有波长短,易于定向发射等优点,声速实验所采用的声波频率一般都在20~60kHz之间。在此频率范围内,采用压电陶瓷换能器作为声波的发射器、接收器效果最佳。 图1 压电陶瓷换能器根据它的工作方式,分为纵向(振动)换能器、径向(振动)换能器
及弯曲振动换能器。声速教学实验中所用的大多数采用纵向换能器。图1为纵向换能器的结构简图。 2.共振干涉法(驻波法)测量声速 假设在无限声场中,仅有一个点声源S1(发射换能器)和一个接收平面(接收换能器S2)。当点声源发出声波后,在此声场中只有一个反射面(即接收换能器平面),并且只产生一次反射。 在上述假设条件下,发射波ξ1=Acos (ωt+2πx /λ)。在S2处产生反射,反射波ξ 2 =A 1cos (ωt+2πx /λ),信号相位与ξ1相反,幅度A 1<A 。ξ1与ξ2在反射平面相交叠加, 合成波束ξ 3 ξ3=ξ1+ξ2=(A 1+A 2)cos (ωt-2πx /λ)+A 1cos (ωt+2πx /λ) =A 1cos(2πx /λ)cos ωt+A 2cos (ωt - 2πx /λ) 由此可见,合成后的波束ξ3在幅度上,具有随cos(2πx /λ)呈周期变化的特性,在相位上,具有随(2πx /λ)呈周期变化的特性。 图4所示波形显示了叠加后的声波幅度,随距离按cos(2πx /λ)变化的特征。 图2 换能器间距与合成幅度 实验装置按图7所示,图中S1和S2为压电陶瓷换能器。S1作为声波发射器,它由信号源供给频率为数十千赫的交流电信号,由逆压电效应发出一平面超声波;而S2则作为声波的接收器,压电效应将接收到的声压转换成电信号。将它输入示波器,我们就可看到一组由声压信号产生的正弦波形。由于S2在接收声波的同时还能反射一部分超声波,接收的声波、发射的声波振幅虽有差异,但二者周期相同且在同一线上沿相反方向传播,二者在S1和S2区域内产生了波的干涉,形成驻波。我们在示波器上观察到的实际上是这两个相干波合成后在声波接收器S2处的振动情况。移动S2位置(即改变S1和S2之间的距离),你从示波器显示上会发现,当S2 在某此位置时振幅有最小值。根据波的干涉理论可以知道:任何 发射换能器与接收换能器之间的距离
声速的测定实验报告
声速的测定实验报告 1、实验目的 (1)学会用驻波法和相位法测量声波在空气中传播速度。 (2)进一步掌握示波器、低频信号发生器的使用方法。 (3)学会用逐差法处理数据。 2、实验仪器 超声声速测定仪、低频信号发生器DF1027B 、示波器ST16B 。 3、实验原理 3.1 实验原理 声速V 、频率f 和波长λ之间的关系式为λf V =。如果能用实验方法测量声波的频率f 和波长λ,即可求得声速V 。常用的测量声速的方法有以下两种。 3.2 实验方法 3.2.1 驻波共振法(简称驻波法) S 1发出的超声波和S 2反射的超声波在它们之间的区域内相干涉而形成驻波。当波源的 频率和驻波系统的固有频率相等时,此驻波的振幅才达到最大值,此时的频率为共振频率。 驻波系统的固有频率不仅与系统的固有性质有关,还取决于边界条件,在声速实验中, S 1、S 2即为两边界,且必定是波节,其间可以有任意个波节,所以驻波的共振条件为: Λ Λ3,2,1,2 ==n n L λ (1) 即当S 1和S 2之间的距离L 等于声波半波长的整数倍时,驻波系统处于共振状态,驻波振幅最大。在示波器上得到的信号幅度最大。当L 不满足(1)式时,驻波系统偏离共振状态,驻波振幅随之减小。 移动S 2,可以连续地改变L 的大小。由式(1)可知,任意两个相邻共振状态之间,即 S 2所移过的距离为: () 22 2 11λ λ λ = ? -+=-=?+n n L L L n n (2) 可见,示波器上信号幅度每一次周期性变化,相当于L 改变了2λ。此距离2λ 可由超声声速测定仪上的游标卡尺测得,频率可由低频信号发生器上的频率计读得,根据f V ?=λ,就 可求出声速。 3.2.2 两个相互垂直谐振动的合成法(简称相位法) 在示波器荧光屏上就出现两个相互垂直的同频率的谐振动的合成图形——称为李沙如图形。其轨迹方程为: ()()φφφφ122122122 12 2-=-- ???? ??+???? ??Sin Cos A A XY A Y A X (5) 在一般情况下,此李沙如图形为椭圆。当相位差 12=-=?φφφ时,由(5)式,得 x A A y 12=,即轨迹为一条处在于第一和第三象限的直线[参见图16—2(a)]。
激光测量技术总结
激光测量技术 第一章 激光原理与技术 1、简并度:同一能级对应的不同的电子运动状态的数目; 简并能级:电子可以有两个或两个以上的不同运动状态具有相同的能级,这样的能级叫 简并能级 2、泵浦方式:光泵浦,电泵浦,化学泵浦,热泵浦 3、激光产生三要素:泵浦,增益介质,谐振腔 阀值条件:光在谐振腔来回往返一次所获得光增益必须大于或者等于所遭受的各种 损耗之和. 4、He-Ne 激光器的三种结构:【主要结构:激光管(放电管,电极,光学谐振腔)+电源+光学元件】 1)内腔式;2)外腔式;3)半内腔式 5、激光器分类:1)工作波段:远红外、红外激光器;可见光激光器;紫外、真空紫外激光器;X 光激光器 2)运转方式:连续激光器;脉冲激光器;超短脉冲激光器 6、激光的基本物理性质:1)激光的方向性。不同类型激光器的方向性差别很大,与增益介质的方向性及均匀性、谐振腔的类型及腔长和激光器的工作状态有关。气体激光器的增益介质有良好的均匀性,且腔长大,方向性 ,最好! 例1:对于直径3mm 腔镜的632.8nmHe-Ne 激光器输出光束,近衍射极限光束发散角为 2)激光的高亮度。 3)单色性。激光的频率受以下条件影响:能级分裂;腔长变化←泵浦、温度、振 动 4)相干性:时间相干性(同地异时):同一光源的光经过不同的路径到达同一位置, 尚能发生干涉,其经过的时间差τc 称为相干时间。相干长度: 例 : He-Ne laser 的线宽和波长比值为10-7求Michelson 干涉仪的最大测量长度是 多少? 解: ,最大测量长度为Lmax=Lc/2=3.164m 。 空间相干性(同时异地):同一时间,由空间不同的点发出的光波的相 干性。 7、相邻两个纵模频率的间隔为 谐振腔的作用:(1)提供正反馈;(2)选择激光的方向性;(3)提高激光的单色性。 例 设He-Ne 激光器腔长L 分别为0.30m 、1.0m,气体折射率n~1,试求纵模频率间隔各为多 少? 8、激光的横模:光场在横向不同的稳定分布,激光模式一般用TEMmnq 表示 原因:激活介质的不均匀性,或谐振腔内插入元件(如布儒斯特窗)破坏了腔的旋转对称性。激光横模形成的主要因素是谐振腔两端反射镜的衍射作用,光束不再是平行光,光强也改变为非均匀的。 λ λν?=?=?=//2c t c L c 1 =?c ντm L c 328.6/2=?=λλrad d 4102/22.1-?≈≈λθnL C 2=?νHz 105.10.1121031.0m,Hz 1053 .012103,m 30.0288288 1?=???=?=?=???=?==?νννL L nL c
声速的测量
声速的测量 【一】实验目的 1.学习测量超声波在媒质中的传播速度的方法。 2.用共振干涉法、相位比较法和时差法测量声速,并加深对驻波、振动合成、波的干涉等理论知识的理解。 3.通过实验了解作为传感器的压电陶瓷的功能并培养综合使用仪器的能力。 【二】实验原理 1.声波 声波是一种在弹性媒质中传播的机械波,它能在气体、液体、和固体中传播。但在各种媒质中传播的速度是不同的。频率介于20Hz~20kHz的机械波振动在弹性介质中的传播就可形成声波。频率介于20kHz~500MHz的波称为超声波,在同一媒质中,超声波的传播速度就等于声波的传播速度。由于超声波具有波长短,易于定向发射和会聚等优点,因此在超声波段进行声速的测量比较方便。测量声速时可以利用声速与振动频率f和波长λ之间的关系(即v=λf)求出,也可以利用v=L/t求出,其中L为声波传播的路程,t为声波传播的时间。 声速测量的实验所采用的声波频率一般都在20KHz~60kHz之间。在此频率范围内,采用压电陶瓷换能器作为声波的发射器、接收器效果最佳。 2.共振干涉(驻波)法测声速 实验装置接线如图(1)所示,图中S1和S2为压电陶瓷超声换能器。由声源S1发出平面简谐波沿X轴正方向传播,接收器S2在接收超声波的同时还反射一部分超声波。这样,由S1发出的超声波和由S2反射的超声波在S1和S2之间形成干涉,出现驻波共振现象。 图(1)
设沿X 轴正方向入射波方向的方程为 )(2cos 1λ πx ft A Y ?= (1) 沿X 轴负方向反射波方程为 ) (2cos 1λπx ft A Y += (2) 在入射波和反射波相遇处产生干涉,在空间某点的合振动方程为 t x A Y Y Y ωλπ cos 2cos 2(21=+= (3) 由(3)式可知,当:2)12(2πλπ +=k x k = 0,1,2,3………. (4) 即4)12(λ +=k x k = 0,1,2,3……….时,这些点的振幅始终为零,即为波节。 当:πλπ k x =2 k = 0,1,2,3………. (5) 即2λ k x = k = 0,1,2,3……….时,这些点的振幅最大,等于2A ,即为波腹。 故知,相邻波腹(或波节)的距离为2/λ。 由上式可知,当S 1和S 2之间的距离L 恰好等于半波长的整数倍时,即 2λ k L = k = 0,1,2,3……… 形成驻波,示波器上可观察到较大幅度的信号,不满足条件时,观察到的信号幅度较小。移动S 2,对某一特定波长,将相继出现一系列共振态,任意两个相邻的共振态之间,S 2的位移为, 222)1(1λ λ λ =?+=?=Δ+k k L L L k k (6) 所以当S 1和S 2之间的距离L 连续改变时,示波器上的信号幅度每一次周期性变化,相当于S 1和S 2之间的距离改变了2λ 。此距离2λ 可由游标卡尺测得,频率f 由信号发生器读得,由f v ?=λ即可求得声速。 3.相位比较法 实验装置接线仍如图(1)所示,置示波器功能于X -Y 方式。当S 1发出的平面超声波通过媒质到达接收器S 2时,在发射波和接受波之间产生位相差为: v L f L πλπ???2221==?=Δ (7) 因此可以通过测量?Δ来求得声速。 ?Δ的测定亦可用相互垂直振动合成的李萨如图形来进行。设输入X 方向的入射波振动方程为: )cos(11?ω+=t A x (8) 输入Y 方向的是由S 2接收到的波动,其振动方程为:
声速测定以及声速数据处理
【实验目的】 1.了解压电换能器的功能,加深对驻波及振动合成等理论知识的理解。 2.学习用共振干涉法、相位比较法和时差法测定超声波的传播速度。 3.通过用时差法对多种介质的测量,了解声纳技术的原理及其重要的实用意义。 【实验原理】 在波动过程中波速V 、波长λ和频率f 之间存在着下列关系:λ?=f V ,实验中可通过测定声波的波长λ和频率f 来求得声速V 。常用的方法有共振干涉法与相位比较法。 声波传播的距离L 与传播的时间t 存在下列关系:t V L ?= ,只要测出L 和t 就可测出声波传播的速度V ,这就是时差法测量声速的原理。 1.共振干涉法(驻波法)测量声速的原理: 当二束幅度相同,方向相反的声波相交时,产生干涉现象,出现驻波。对于波束1:)/X 2t cos(A F 1λ?π-ω?=、波束2:()λ?π+ω?=/X 2t cos A F 2,当它们相交会时,叠加后的波形成波束3:()t cos /X 2cos A 2F 3ω?λ?π?=,这里ω为声波的角频率,t 为经过的时间,X 为经过的距离。由此可见,叠加后的声波幅度,随距离按()λ?π/X 2cos 变化。如图28.1所示。 压电陶瓷换能器1S 作为声波发射器,它由信号源供给频率为数千周的交流电信号,由逆压电效应发出一平面超声波;而换能器2S 则作为声波的接收器,正压电效应将接收到的声压转换成电信号,该信号输入示波器,我们在示波器上可看到一组由声压信号产生的正弦波形。声源1S 发出的声波,经介质传播到2S ,在接收声波信号的同时反射部分声波信号,如果接收面(2S )与发射面(1S )严格平行,入射波即在接收面上垂直反射,入射波与发射波相干涉形成驻波。我们在示波器上观察到的实际上是这两个相干波合成后在声波接收器2S 处的振动情况。移动2S 位置(即改变1S 与2S 之间的距离),你从示波器显示上会发现当2S 在某些位置时振幅有最小值或最大值。根据波的干涉理论可以知道:任何二相邻的振幅最
声速的测量
声速的测量 1. 实验目的 (1)了解声速测量仪的结构和测试原理; (2)通过实验了解作为传感器的压电陶瓷的功能; (3)用共振干涉法和相位比较法测量声速,并加深有关共振、振动合成、波的干涉等理论知识的理解; (4)进一步掌握示波器、低频信号发生器和数字频率计的使用。 2. 实验仪器 SV-DH系列声速测试仪,SVX-5型声速测试仪信号源,双踪示波器(20MHz)。 3. 仪器简介 (1) 声波 频率介于20Hz~20kHz的机械波振动在弹性介质中的传播就形成声波,介于20kHz~500MHz的称为超声波,超声波的传播速度就是声波的传播速度,而超声波具有波长短,易于定向发射和会聚等优点,声速实验所采用的声波频率一般都在20KHz~60kHz之间。在此频率范围内,采用压电陶瓷换能器作为声波的发射器、接收器、效果最佳。 (2) 压电陶瓷换能器 SV-DH系列声速测试仪主要由压电陶瓷换能器和读数标尺组成。压电陶瓷换能器是由压电陶瓷片和轻重两种金属组成。 压电陶瓷片是由一种多晶结构的压电材料(如石英、锆钛酸铅陶瓷等),在一定温度下经极化处理制成的。它具有压电效应,即受到与极化方向一致的应力T时,在极化方向上产生一定的电场强度E且具有线性关系:E=CT;当与极化方向一致的外加电压U加在压电材料上时,材料的伸缩形变S与U之间有简单的线性关系:S=KU,C为比例系数,K为压电常数,与材料的性质有关。由于E与T,S与U之间有简单的线性关系,因此我们就可以将正弦交流电信号
4. 实验原理 根据声波各参量之间的关系可知V =λν,其中V 为波速,λ为波长, ν为频率。 在实验中,可以通过测定声波的波长λ和频率ν求声速。声波的频率ν可以直接从低频信号发生器(信号源)上读出,而声波的波长λ则常用相位比较法(行波法)和共振干涉法(驻波法)来测量。 (1) 相位比较法 实验装置接线如图2所示,置示波器功能于X -Y 方式。当S1发出的平面超声波通过媒质到达接收器S2,在发射波和接收波之间产生相位差: V L L πνλπ???2221==-=? (1) 因此可以通过测量??来求得声速。 ??的测定可用相互垂直振动合成的李萨如图形来进行。设输入X 轴的入射波振动方程为 )cos(11?ω+=t A x (2) 输入Y 轴的是由S2接收到的波动,其振动方程为: )cos(22?ω+=t A y (3) 图2 实验装置 上两式中:A 1和A 2分别为X 、Y 方向振动的振幅,ω为角频率,1?和2?分别为X 、Y 方向振动的初相位,则合成振动方程为 )(sin )cos(2122122 1222212????-=--+A A xy A y A x (4) 此方程轨迹为椭圆,椭圆长、短轴和方位由相位差21???-=?决定。当??=0时,由式得
激光测试原理
摘要 太赫兹成像技术的研究是目前太赫兹研究领域的热门课题,本论文主要针对太赫兹成像技术进行了系统的介绍与分析。与光学相干层析成像技术相结合,我们提出了一种太赫兹相干层析技术。该技术的纵向分辨率可达100μm以下,这一实验结果高于太赫兹飞行时间成像技术和合成孔径成像技术。此外,该技术具有系统结构简单、紧凑等特点,在高精度的材料无损探伤领域具有及其巨大的应用前景。 关键词:太赫兹成像技术相干层析成像材料无损探伤分辨率 引言 由于太赫兹对大部分非金属材料和非极性物质具有极强的穿透能力,并且对单光子能量低,不会对生物组织产生有害的电离作用,因此太赫兹技术被广泛的应用于材料无损探测、安检机生物组织病变检测等成像领域。
1995年,Hu等人首次在太赫兹时域光谱系统中加入一二维扫描的载物台,待测样品被放置在太赫兹聚焦点上,并在与太赫兹垂直方向进行二维扫描,通过记录下每个扫描点透过的太赫兹时域波形,形成样品的太赫兹图像。他们使用这种方法完成了对微电子芯片内部结构的成像。此后,太赫兹成像引起了研究人员的极大关注,并逐渐发展起来了一些新的太赫兹成像技术,主要包括以下几种: (1) 连续太赫兹波二维成像技术 (2) 合成孔径成像技术 (3) 太赫兹近场成像技术 (4) 脉冲太赫兹波飞行时间成像技术 (5) 太赫兹波计算机辅助层析成像技术 研究一种系统结构及扫描方式简单、成像精度高的太赫兹三维层析成像技术在材料高精度无损探测领域具有及其重要的意义。学相干层析成像技术是基于宽带光源的弱相干特性对待测物体内部结构进行高分辨率层析成像的技术,它依靠光源的时间相干性,对物体进行三维结构重构。太赫兹对非金属材料很强的穿透能力,其穿透深度很高,将太赫兹技术与光学相干层析技术结合起来,我们提出了太赫兹相干层析技术。 一太赫兹相干层析技术 相对红外和微波,由于太赫兹波较低的单光子能量和对大部分非金属材料具有较高的穿透性能等特点,近几十年来逐渐引起了人们的研究热潮。自1995年Hu 等人[10]首次利用太赫兹辐射进行二维成像实验以来,太赫兹成像技术受到世界许多研究人员的关注。2002年,B. Ferguson等人将X射线波段的层析成像技术移植到太赫兹波段,提出太赫兹三维层析成像的概念[47]。该技术原理是一束太赫兹波穿透被成像物体后,然后通过平移和转动,使太赫兹以不同位置和不同角度穿透被
声速测量
实验十二 声速测量 编辑:李家望 赵斌 摘 要 本实验通过压电换能器将声波转换为电信号,从而利用示波器测量了空气中的声速。相对不确定度为1.9%和1.3%。 关键词 压电换能器,声波,电信号,示波器,声速 实验目的 1. 利用共振干涉法和位相比较法测量超声波在空气中的传播速度。 2. 加强对驻波及振动合成等理论的理解。 实验原理 1.声波在空气中传播速度:理想气体μ γRT v = V P C C /=γ为比热容比,μ是气体的摩尔质量。 在室温时,声速的近似理论公式为:15 .273145.33110 0t T t v v + ≈+= (m/s ) 2.压电换能器工作原理 压电换能器是一种多晶结构的压电陶瓷材料,被极化的压电陶瓷具有压-电效应。超声波的产生是利用压电陶瓷的逆压电效应使电压变化转变为声压变化,超声波的接收则是利用压电陶瓷的正压电效应使声压变化转变为电压变化。 3.共振干涉法(驻波法)测声速 实验装置如图一所示。图中S 1、S 2为压电陶瓷喇叭,S 1接函数信号发生器,作为超声波源; S 2为接收器,接二踪示波器,且能在接收声波的同时反射部分声波。这样,S 1发出的超声波和S 2反射的超声波在它们之间的区域内因同频率,同振动方向,传播方向相反相干涉而形成驻波。 移动S 2即改变L ,当S 2将经过波腹时,声波信号最强,在示波器上得到的信号振幅最大;当S 2将经过波节时,在示波器上得到的信号振幅最小(因反射声波(会衰减)振幅小于入射声波振幅,合成后波节振幅不为零)。S 2将经过一系列波腹,波节的位置,示波器上的信号幅度会周期性变化,任意两个相邻波腹(节)的距离,通过S 2的移动的距离由游标卡尺可测得:必满足 ΔL = L n +1- L n =λ/2 又声波频率f 由函数信号发生器上读得,可得声速: v =λ f =2ΔL f 4.位相比较法(行波法)测声速 实验装置如图二所示。将函数信号发生器的交变信号输入S 1的同时输入示波器的X 轴(CH1通道),将S 2输出的信号接入示波器的Y 轴(CH2通道),则示波器上就会出现李萨如图形。 当改变S 1和S 2之间的距离L ,相当于改变了发射波和接收波之间的相位差Δφ,示波器上图形也随之不断变化。当S 2与S 1的距离变化ΔL = L n +1- L n =λ,它们之间的相位差Δφ=2π,如图三所示。显然,根据李萨如图形的变化情况可测得波长λ,频率f 仍由函数信号发生器上读得, 由v =λ f =ΔL f 即可求得声速。 图 一 共振干涉法测声速
声速测量数据处理与思考题
声速测量 (1)用共振干涉法和相位比较法测声速有何相同和不同? 相同之处:都用连续波测量,均依靠示波器测量 共振法:平行传播的声波与反射波产生干涉,形成驻波。改变半个波长的传播路程,驻波的波幅变化一个周期,从而可测得波长,乘以频率,得到声速。 相位法:比较接收波相对与发射波的相位差,改变一个波长的传播路径,相位变化360度,从而通过测看相位图,就可测得波长,乘以频率,得到声速。(2)声速测量试验中,定性分析共振法测量时声压振幅极大值随距离变大而减少的原因。 这是由于声波在实际介质中传播时,由于扩散、吸收和散射等原因,会随着离开声源的距离增加而自身逐渐减弱。这种减弱与传播距离、声波频率和界面等因素有关。而振幅的大小恰好表示波动能量的大小,所以随着声波的不断向前传播,振幅会逐渐变小。 1. 传播衰减:点声源、面声源、线声源三种类型不同的声源,辐射出的声波波阵面形状不同,随着传播距离增加其扩散衰减的规律也不相同。 2.吸收衰减:分为有空气吸收、绿色植被的吸收、气流和大气温度梯度的吸收。由于种种影响才会造成声波的衰减,在相同环境条件下,人耳可听到的声波范围为20HZ~20000HZ,根据频率越高,在传播过程中更易受空气等等各种的影响的道理,故衰减得比较快。 声速测量实验数据处理: 要求:(1)用逐差法处理数据,计算超声波的波长; (2)利用不确定度的间接传递,计算超声波传播速度的不确定度,并表示出测量结果; (3)计算测量时声速的理论值,并与测量值比较,得出百分误差。 1.共振干涉法测声速实验数据记录 共振频率T=20 ℃ f 37.056 KHz i 123456789101112 Li(mm)
高精度相位式激光测距的实现
高精度相位式激光测距的实现 施金钗,黄元庆 摘要:本文介绍了相位式激光测距基本原理,提出了一种提高测相精度的测距方法,并详细论述了差频测相和数字测相方法,最后对今后的发展前景进行了展望。 关键字:激光测距;相位式;差频测相;数字测相 Realization of Phase Laser Range Finding Shi Jinchai, Huang Yuanqing Abstract: The paper introduces the base theory of the phase laser range finder, and it introduce a method of range finding to improve the high precision. The technique of frequency difference and digital measurement of phase finding method are also proposed in detail. Eventually the prospect of their further study is suggested. Keywords: laser range finding, phase-shift, frequency difference of phase finding, digital measurement technique of phase finding 1 绪论 随着科学技术的不断发展,人类在民用和军事领域,对距离量的测量要求非常广泛。激光测距是集光学、激光、光电子及集成电子等多种技术为一体的综合性技术,与其它测距技术相比,激光具有角分辨力高、抗干扰能力强,可以避免微波贴近地面的多路径效应和地物干扰问题,并且具有天线尺寸小、质量轻、结构小巧、和安装调整方便等优点,激光测距仪是目前高精度测距最理想的仪器之一。由于以上各方面的原因,使得激光测距在测量领域得到了青睐,并被迅速推广应用,在国民经济和国防建设中具有非常重要的意义[1]。 激光测距技术是最早用于军事上的激光技术。世界上第一台激光测距机于1961年诞生在美国休斯飞机公司 [2],称为柯利达I 型,1962年第一台军用激光测距机便成功地进行了示范表演,之后该公司相继研制成几种实验型军用激光测距机在部队进行试验和鉴定,结果证明激光测距机可作为一种新的测距仪代替原装备的光学测距机。1971年美国陆军首先装备了AN/GVS-3型红宝石激光测距机。供炮兵前方观察员或观察所使用。此后,各种型号的侦察用激光测距机相继装备各国的军队1963-1967年美国休斯公司相继研制成几种实验型军用激光测距机,1969年军用激光测距机首先装备军队[3]。 中国科学院上海光机所研制出便携式激光测距机,对漫反射水泥墙的测距达100m ,采用300MHz 计数方式,测距精度0.5m ,重复频率1KHz 。中国计量学院信息工程系光电子所与国外合作开发了低价、便携式半导体激光测距机,作用测距1KM ,精度处<±1m ,采用4M 晶振,运用了线性时间放大技术。常州莱赛公司研制了作用距离200m ,测距精度0.5m 的半导体激光测距机[4]。 2 相位测距基本原理 相位式测距是通过测量连续的幅度调制信号在待测距离上往返传播所产生的相位延迟,间接地测定信号传播时间,从而得到被测距离的。这种方法测量精度高,通常在毫米量级。测距原理图如下图1。相位法测距就是间接的测定调制光波经过时间D t 后所产生的相位变化D ?,以代替测定时间D t ,从而求得光波所经过的路程D 。各参数间的关系为[5]: f D D D π?ω?22c 2c t 2c D ×=×=×= (1) 式中 c 为光波在空气中传播的速度;D ?为调制光信号经过被测距离D 而产生的相位移;ω为调制信号的 角频率,f 为调制信号频率。
用驻波法测声速
用驻波法测声速实验目的 1.学会用驻波法测空气中的声速 2.学会用逐差法处理实验数据 实验仪器
实验原理 频率介于20Hz ~20kHz 的机械波振动在弹性介质中的传播就形成声波,介于20kHz ~500MHz 的称为超声波,超声波的传播速度就是声波的传播速度,而超声波具有波长短,易于定向发射和会聚等优点,声速实验所采用的声波频率一般都在20KHz ~60kHz 之间。在此频率范围内,采用压电陶瓷换能器作为声波的发射器、接收器、效果最佳。 使S1发出一平面波。S2作为超声波接收头,把接收到的声压转换成交变的正弦电压信号后输入示波器观察,示波器置扫描方式。S2在接收超声波的同时还反射一部分超声波。这样,由S1发出的超声波和由S2反射的超声波在S1和S2之间产生定域干涉。 当S1和S2之间的距离L 恰好等于半波长的整数倍时,即 2 λ k L =, k = 0,1,2,3 …… ; 形成驻波共振。任意两个相邻的共振态之间,S2的位移为, 2 22) 1(1λ λλ= -+=-=?+k k L L L k k 所以当S1和S2之间的距离L 连续改变时,示波器上的信号幅度每一次周期性变 化,相当于S1和S2之间的距离改变了 2λ。此距离2 λ 可由读数标尺测得,频率f 由信号发生器读得,由f ?=λυ即可求得声速。
实验步骤 只有当换能器S1和S2发射面与接收面保持平行时才有较好的接收效果;为了得到较清晰的接收波形,应将外加的驱动信号频率调节到发射换能器S1谐振频率点处,才能较好地进行声能与电能的相互转换,提高测量精度,以得到较好的实验效果。 超声换能器工作状态的调节方法如下:各仪器都正常工作以后,首先调节声速测试仪信号源输出电压(100mV~500mV之间),调节信号频率(在25~45kHz),观察频率调整时接收波的电压幅度变化,在某一频率点处(34.5~37.5kHz之间)电压幅度最大,同时声速测试仪信号源的信号指示灯亮,此频率即是压电换能器S1、S2相匹配的频率点,记录频率νi ,改变S1和S2之间的距离,适当选择位置(即:至示波器屏上呈现出最大电压波形幅度时的位置),再微调信号频率,如 此重复调整,再次测定工作频率,共测5次,取平均值 0 。 将测试方法设置到连续波方式,把声速测试仪信号源调到共振工作频率(根据共振特点观察波幅变化进行调节)。 在共振频率下,将S2移近S1处,依次记下各振幅最大时的读数标尺位置 L 1、L 2 …共10个值; 记下室温t ; 实验数据 序号 1 2 3 4 5 6 7 8 f Hz 37164 37165 37167 37168 37168 37169 37168 37169 Xn 8.060cm 8.500cm 8.968cm 9.422cm 9.890cm 10.360c m 10.820c m 11.276c m 序号9 1 16 f Hz 37169 37168 37168 37168 37168 37169 37169 37169 X n11.746c m 12.204c m' 12.660c m 13.120c m 13.590c m 14.040c m 14.500c m 14.960c m
相位式激光测距仪是什么呢
相位式激光测距仪是什么呢? 我们都知道激光测距仪,是利用激光对目标的距离进行准确测定的仪器。激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。激光测距仪重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学测距仪的五分之一到数百分之一。那相位式激光测距仪是什么呢? 相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。即用间接方法测定出光经往返测线所需的时间。 相位式激光测距仪一般应用在精密测距中。由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。 在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。 为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,短程激光测距仪均采用数字测相原理来求得φ。 由上所述一般情况下相位式激光测距仪使用连续发射带调制信号的激光束,为了获得测距高精度还需配置合作目标,而推出的手持式激光测距仪是脉冲式激光测距仪中又一新型测距仪,它不仅体积小、重量轻,还采用数字测相脉冲展宽细分技术,无需合作目标即可达到毫米级精度,测程已经超过100m,且能快速准确地直接显示距离。是短程精度精密工程测量、房屋建筑面积测量中最新型的长度计量标准器具。 不管怎么说,了解每一种激光测距仪的具体信息,能够帮助大家更好的使用它,今天大家了解了相位式激光测距仪的应用原理,如果还想咨询更多的信息,可以登录在我们E讯网里搜索更多资料,对于激光测距仪的发展历程进行了解,能够让我们对其认识更加深刻。
大学物理实验报告-声速的测量
声速的测量 【实验目的】 1.学会用共振干涉法、相位比较法以及时差法测量介质中的声速 2.学会用逐差法进行数据处理; 3.了解声速与介质参数的关系。 【实验原理】 由于超声波具有波长短,易于定向发射、易被反射等优点。在超声波段进行 声速测量的优点还在于超声波的波长短,可以在短距离较精确的测出声速。 超声波的发射和接收一般通过电磁振动与机械振动的相互转换来实现,最常 见的方法是利用压电效应和磁致伸缩效应来实现的。本实验采用的是压电陶瓷制 成的换能器(探头),这种压电陶瓷可以在机械振动与交流电压之间双向换能。 声波的传播速度与其频率和波长的关系为: v f λ=? (1) 由(1)式可知, 测得声波的频率和波长,就可以得到声速。同样,传播速度亦可用 /v L t = (2) 表 示,若测得声波传播所经过的距离L 和传播时间t ,也可获得声速。 1. 共振干涉法 实验装置如图1所示,图中和为压电晶体换能器,作为声波源,它被低频信号发生器输出的交流电信号激励后,由于逆压电效应发生受迫振动,并向空气中定向发出以近似的平面声波;为超声波接收器,声波传至它的接收面上时,再被反射。当和的表面近似平行时,声波就在两个平面间来回反射,当两个平面间距L 为半波长的整倍数,即 (3) 时,发出的声波与其反射声波的相位在处差(n=1,2 ……),因此形成 共振。 因为接收器的表面振动位移可以忽略,所以对位移来说是波节,对声压来说是波腹。本实验测量的是声压,所以当形成共振时,接收器的输出会出现明显
增大。从示波器上观察到的电信号幅值也是极大值(参见图2)。 图中各极大之间的距离均为,由于散射和其他损耗,各级大致幅值随距离增大而逐渐减小。我们只要测出各极大值对应的接收器的位置,就可测出波长。由信号源读出超声波的频率值后,即可由公式(1)求得声速。 2.相位比较法 波是振动状态的传播,也可以说是位相的传播。沿波传播方向的任何两点同相位时,这两点间的距离就是波长的整数倍。利用这个原理,可以精确的测量波 长。实验装置如图1所示,沿波的传播方向移动接收器,接收到的信号再次与 发射器的位相相同时,一国的距离等于与声波的波长。 同样也可以利用李萨如图形来判断位相差。实验中输入示波器的是来自同一信号源的信号,它们的频率严格一致,所以李萨如图是椭圆,椭圆的倾斜与两信 号的位相差有关,当两信号之间的位相差为0或时,椭圆变成倾斜的直线。 3.时差法 用时差法测量声速的实验装置仍采用上述仪器。由信号源提供一个脉冲信号经发出一个脉冲波,经过一段距离的传播后,该脉冲信号被接收,再将该信号返回信号源,经信号源内部线路分析、比较处理后输出脉冲信号在、之间 的传播时间t,传播距离L可以从游标卡尺上读出,采用公式(2)即可计算出声速。 4.逐差法处理数据 在本实验中,若用游标卡尺测出个极大值的位置,并依次算出每经过个 的距离为 这样就很容易计算出。如测不到20个极大值,则可少测几个(一定是偶数),用类似方法计算即可。
控制测量学相位式光电测距仪的工作原理
相位式光电测距仪的工作原理 相位式光电测距仪的种类较多,但其基本的工作原理是相同的。本节将讨论相位式光电测距仪的工作原理,并着重介绍它的几个主要部件的工作原理。 4.2.1 相位式光电测距仪的工作原理 相位式光电测距仪的工作原理可按图4-4所示的方框图来说明。 图4-4 由光源所发出的光波(红外光或激光),进入调制器后,被来自主控振荡器(简称主振)的高频测距信号1f 所调制,成为调幅波。这种调幅波经外光路进入接收器,会 聚在光电器件上,光信号立即转化为电信号。这个电信号就是调幅波往返于测线后经过解调的高颇测距信号,它的相位已延迟了Φ。 ?Φ+?=ΦN π2 这个高频测距信号与来自本机振荡器(简称本振)的高频信号1f '经测距信号混频 器进行光电混频,经过选频放大后得到一个低频(11f f f '-=?)测距信号,用D e 表示。D e 仍保留了高频测距信号原有的相位延迟?Φ+?=ΦN π2。为了进行比相,主振高频 测距信号1f 的一部分称为参考信号与本振高频信号1f '同时送入参考信号混频器,经过 选频放大后,得到可作为比相基准的低频(11f f f '-=?)参考信号,0e 表示,由于0e 没有经过往返测线的路程,所以0e 不存在象D e 中产生的那一相位延迟Φ。因此,D e 和0e 同时送人相位器采用数字测相技术进行相位比较,在显示器上将显示出测距信号往返于测线的相位延迟结果。 当采用一个测尺频率1f 时,显示器上就只有不足一周的相位差?Φ所相应的测距尾 数,超过一周的整周数N 所相应的测距整尺数就无法知道,为此,相位式测距仪的主振和本振二个部件中还包含一组粗测尺的振荡频率,即主振频率 32,f f 和本振频率 32,f f ''。如前所述,若用粗测尺频率进行同样的测量,把精测尺与一组粗测尺的结果组合起来,就能得到整个待测距离的数值了。 4.2.2 相位式光电测距仪各主要部件的工作原理
- 激光干涉测量
- 第二章 激光干涉测量技术
- 激光干涉仪使用技巧讲解.doc
- 光电测试技术-第5章激光干涉测试技术
- 02 第二章 激光干涉测量技术(上)
- 激光干涉位移测量技术
- 光电测试技术-第5章-激光干涉测试技术(1/6)PPT课件
- 精密位移量的激光干涉测量方法及实验
- 第五讲激光外差干涉测长与测振
- 激光干涉测量
- 《激光移相干涉测试系统的设计》
- 激光干涉测量技术
- 光电测试技术-第5章 激光干涉测试技术(4/6)共30页
- 第5章激光干涉测试技术
- 光电检测技术-范志刚-第6章 激光干涉测试技术综述
- 激光干涉测量技术(合肥工业大学)PPT课件
- 实验三 激光干涉测量技术
- 光电测试技术-第5章_激光干涉测试技术(2/6)
- 激光干涉测试技术
- 第2章--激光干涉测量技术-1