关于机器人与焊钳连接详解图

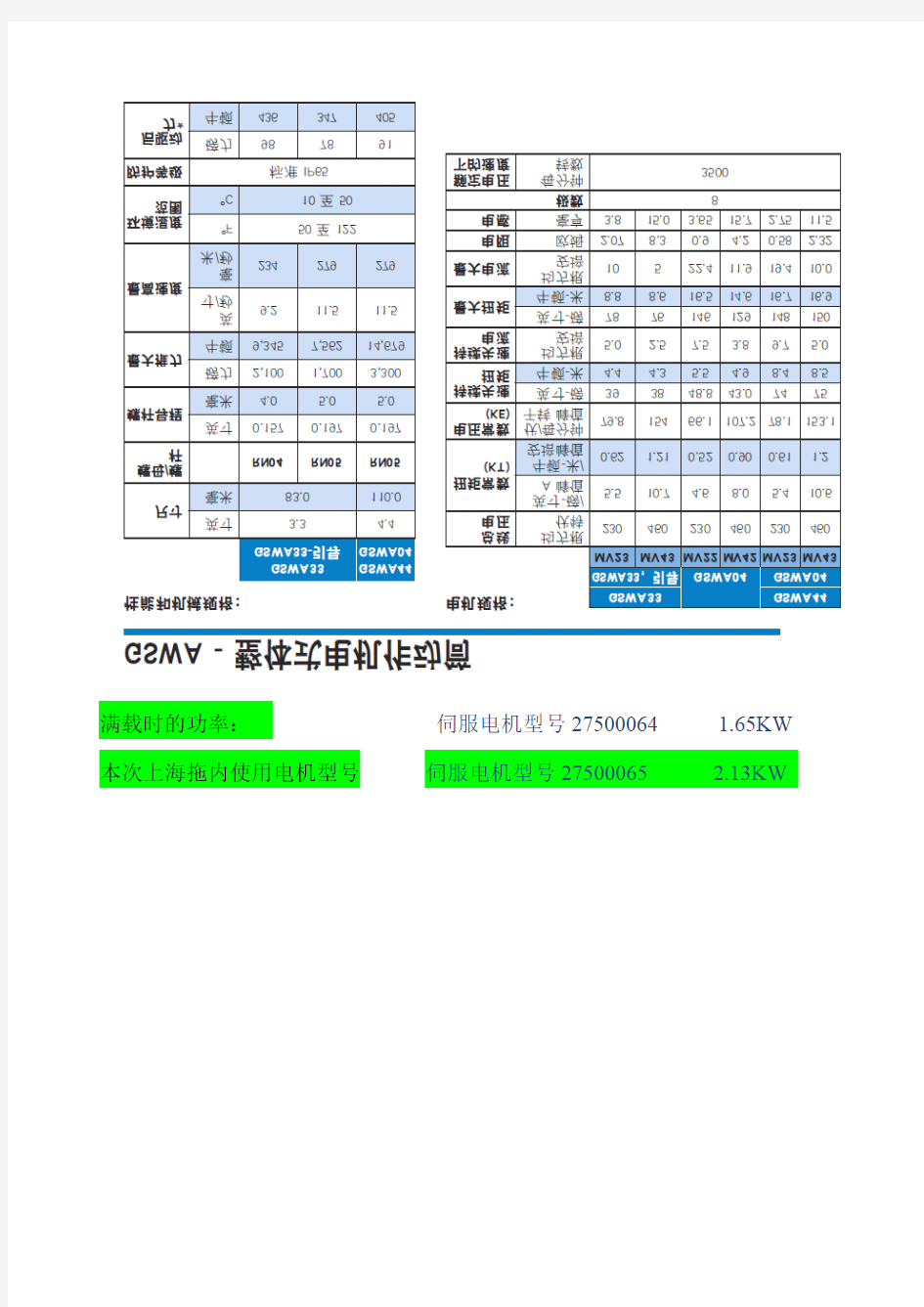
我们的机器人前端的插头型号如下表所示,机器人到货后,我们YSR进行改造,在下表中也有明确。
TOLOMATIC匹配的MOTOMAN编码器:UTSAE-B17CLE(MOTOMAN提供编码器给韦孚集成)
TOLOMATIC伺服电机参数:
MOTOMAN电机规格:
P/N27500064Reference ServoWeld Catalog page15Model GSWA04with RN05 roller screw&MV22servo motor
P/N27500065Reference ServoWeld Catalog page15Model GSWA04with RN05 roller screw&MV23servo motor
本次上海拖内使用电机型号伺服电机型号27500065 2.13KW
(整理)Delta并联机器人的机构设计1.
零件的设计与选型 1 定平台的设计 定平台又称基座,在结构中属于固定的,具体的参数见图一,厚度20cm。定 平台的等效圆半径为210mm。材料选用铸铁,铸造加工,开口处磨削加工保证精度。最后进行打孔的工艺。 图一定平台设计图
具体参数为长* 厚* 宽:880mm*10mm*20mm。孔的参数为φ10*10mm。材料用铝合金,设计为杆式,质量小,经济,同时也满足载荷条件。 图二驱动杆的设计图 3 从动杆的设计 具体参数为长* 宽* 高:620*20*10mm。孔参数为φ10*10mm。材料选用铝合金。 图三从动杆的设计图
参数如下图,考虑到重量因素,采用铝合金,切削加工。动平台的等效圆半径为50mm,分布角为21.5°。 图四动平台的设计图 5 链接销的设计 45号钢,为主动杆和定平台的连接销:φ9*66mm。
6 球铰链的选型 目前,大多数的Delta机构的主动杆与从动杆的链接方式为球铰链的链接。球型连接铰链是用于自动控制中的执行器与调节机构的连接附件。它采用了球型轴承结构具有控制灵活、准确、扭转角度大的优点,由于该铰链安装、调整方便、安全可靠。所以,它广泛地应用在电力、石油化工、冶金、矿山、轻纺等工业的自动控制系统中。球铰链由于选用了球型轴承结构,能灵活的承受来自各异面的压力。本文选用球铰链设计,是主要因为球铰链的可控性,以及结构简单,易于装配。且有很好的可维护性。 本文选用了伯纳德的SD 系列球铰链,相对运动角为60°。 7 垫圈的选型 此处我们选用标准件。GB/T 97.1 10‐140HV ,10.5*1.6mm。 8 电机的选型 本设计的Delta 机器人,主要面向工业中轻载的场合,比如封装饼干等。因此,以下做电动机的选型处理。 由于需要对角度的精确控制,因此决定选用伺服电机。交流伺服电机有以下特点:启动转矩大,运行范围广,无自转现象,正常运转的伺服电动机,只要失去控制电压,电机立
扫地机器人原理及实现
扫地机器人结构及控制系统设计 自动清扫机器人是当今服务机器人领域一个热门的研究方向。从理论和技术上讲,自动清扫机器人比较具体地体现了移动机器人的多项关键技术,具有较强的代表性,从市场前景角度讲,自动清扫机器人将大大降低劳动强度、提高劳动效率,适用于宾馆、酒店、图书馆、办公场所和大众家庭。因此开发自动清扫机器人既具有科研上的挑战性又具有广阔的市场前景。 家用智能清扫机,包括计算机、传感器、电机与动力传动机构、电源、吸尘器、电源开关、操作电位计等,在清扫机的顶部共设有三个超声波距离传感器;清扫机底部前方边沿安装有5个接近开关,接近开关与超声波距离传感器一起,构成清扫机测距系统;清扫机装有两台直流电机;在清扫机的底部安装有吸尘器机构。自动清扫机器人的功能是自动完成房间空旷地面尤其是家居空旷地面的清扫除尘任务,打扫前,要把房间里的物体紧靠四周墙壁,腾出空旷地面。清扫机完成的主要功能:能自动走遍所以可进入的房间,可以自动清扫吸尘,可在遥控和手控状态下清扫吸尘。 本文所介绍的自动清扫机器人的总体布局方案如图1所示,前后两轮为万向轮,左右两轮为驱动轮。驱动轮设计采用两轮独立且各由两台步进电动机驱动的转向方式,通过控制左右两轮的速度差来实现转向。考虑到机器人实际应用的实用性,本驱动系统设计成一个独立的可方便替换的模块,当机器人驱动系统发生故障时,只需简单步骤就可以对驱动部分进行替换。同时为了机器人能够灵活的运动,从动轮选用万向轮。 下图为自动清扫机的三维立体图:
自动清扫机器人车箱体采用框架式结构。从下至上分隔成三个空间:第一层装配各运动部件的驱动电机、传动机构;第二层为垃圾存储空间;第三层装配机器人控制系统、接线板、
工业机器人控制系统组成及典型结构
工业机器人控制系统组成及典型结构 一、工业机器人控制系统所要达到的功能机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下: 1、记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。 2、示教功能:离线编程,在线示教,间接示教。在线示教包括示教盒和导引示教两种。 3、与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。 4、坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。 5、人机接口:示教盒、操作面板、显示屏。 6、传感器接口:位置检测、视觉、触觉、力觉等。 7、位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。 8、故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。 二、工业机器人控制系统的组成 1、控制计算机:控制系统的调度指挥机构。一般为微型机、微处理器有32 位、64 位等如奔腾系列CPU 以及其他类型CPU 。 2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的 CPU 以及存储单元,与主计算机之间以串行通信方式实现信息交互。 3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。 4、硬盘和软盘存储存:储机器人工作程序的外围存储器。 5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。 6、打印机接口:记录需要输出的各种信息。 7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。 8、轴控制器:完成机器人各关节位置、速度和加速度控制。 9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。 10 、通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。 11 、网络接口 1) Ethernet 接口:可通过以太网实现数台或单台机器人的直接PC 通信,数据传输速率高达 10Mbit/s ,可直接在PC 上用windows 库函数进行应用程序编程之后,支持TCP/IP 通信协议,通过Ethernet 接口将数据及程序装入各个机器人控制器中。
机器人原理与制作实验指导书及报告
机器人原理与制作实验指导书 华中科技大学文华学院机器人实验室
实验一熟悉机器人与C51单片机硬件软件 一、实验目的 1、掌握宝贝车机器人用C51教学板与计算机硬件连接; 2、熟悉及掌握C51系列单片机Keil uVision IDE(集成开发环境)软件、ISP 下载软件及串口调试终端的使用方法。 二、实验设备及软件 宝贝车机器人、ISP下载线、串行接口、并行接口、计算机、电源。 Keil uVision2 IDE集成开发环境、SL ISP下载软件、串口调试软件。 三、实验内容和步骤 单片机控制的宝贝车机器人通过串并口通信交互由硬件系统与软件系统相互结合组成的一个完整的智能控制系统。单片机必须与外围设备及软件组成一个完整的应用系统(如图1.1)。 1、熟悉宝贝车机器人的结构组成(如图1.2):小车底板、车轮、教学板、伺服电机、电池盒。这是宝贝车机器人的硬件系统,它的微控制器(MCU)是由Atmel 公司生产与51系列兼容的8位AT89S52单片机。 图1.1单片机应用系统图图1.2采用C51单片机的机器人 2、教学板指方便单片机与电源、ISP下载线、串口线以及各种传感器和电机的连接制作的一个电路板(如图 1.3)。将宝贝车机器人与计算机硬件连接,并连接到电源。 ●连接单片机教学板ISP接口到计算机,以便程序下载; ●连接单片机教学板串行接口到计算机,以便调试和交互; ●连接机器人到电池或者是供电电源。
图1.3 C51单片机教学板 ①—串行接口;②—ISP 接口;③—电源接口;④—三位开关; ⑤—绿色LED 电源指示灯;⑥—AT89S52单片机;⑦—“Reset ”按钮; ⑧—面包板;⑨—专用电机控制接口插座 3、运用C 语言编程,运用编译器编译生成可执行文件并下载到单片机,用串口调试软件查看单片机输出信息。 ①建立用户文件夹,方便管理程序,拷入编译所需头文件。 ②进入编程系统(Keil uVision2 IDE ): 1)新建项目工程(*.uv2):Project →New Project ,命名,保存在新建立的用户文件夹内;选择单片机生产公司及类型:Atmel 、AT89S52。 2)新建C 程序文件:File →New ;编辑好程序,保存为*.c 的文件。注意程序关键字的拼写,英文标点,字母的大小写等。 3)添加C 程序到项目工程:Source Group 1右键单击→Add Files to Group Source 。Source Group 1前面出现+号,单击它出现刚才添加的C 程序文件名,单击此C 文件,Keil 会自动识别关键字,并以不同的颜色提示用户加以注意,这样会使用户少犯错误,有利于提高编程效率。 4)生成执行文件十六进制目标代码文件(*.hex):Target 1 右键单击→Option for target ‘Target 1’→Output →选中“Create Hex Fi :”→连接编译生成可执行文件*.hex 。编译要求没有错误产生,允许出现警告。 ③进入下载系统(SL ISP ): 1)参数选择:并口LPT1;下载速度选择TURBO 模式;单片机型号:AT89S52; 2)选择执行文件:Flash →*.hex ; (2)ISP 下载线 ① ② ③ ④ ⑥ ⑦ ⑧ ⑨ ⑤
机器人电路图
W e r e s e r v e a l l r i g h t s i n t h i s d o c u m e n t a n d i n t h e i n f o r m a t i o n c o n t a i n e d t h e r e i n .R e p r o d u c t i o n , u s e o r
W e r e s e r v e a l l r i g h t s i n t h i s d o c u m e n t a n d i n t h e i n f o r m a t i o n c o n t a i n e d t h e r e i n .R e p r o d u c t i o n , u s e o r
W e r e s e r v e a l l r i g h t s i n t h i s d o c u m e n t a n d i n t h e i n f o r m a t i o n c o n t a i n e d t h e r e i n .R e p r o d u c t i o n , u s e o r
W e r e s e r v e a l l r i g h t s i n t h i s d o c u m e n t a n d i n t h e i n f o r m a t i o n c o n t a i n e d t h e r e i n .R e p r o d u c t i o n , u s e o r
并联机器人构型方法 (1)
机器人机构设计中最重要的步骤之一是解决机构型综合的问题,机器人机构构型方法的研究具有十分重要的理论和实际意义,尤其是并联机器人的型综合方法一直以来都受到国内外许多研究学者的关注。在并联机器人机构的构型理论研究中,基于机构末端运动特征描述与机构需要完成的功能的简单有效的构型方法还缺乏系统的研究。 并联机器人机构构型方法研究 8 多自由度机构,其构型综合是一个非常具有挑战性的难题。目前国内外主要有 5 种并联机构的型综合研 究方法,即:基于机构的结构公式的构型方法、基于螺旋理论的综合方法、基于群论和微分几何的综合 方法、基于单开链的型综合方法以及基于集合的综合方法。 1-3-1 基于机构的结构公式的构型方法 基于机构的结构公式(即自由度计算公式)的构型方法是比较传统的一种并联机构的型综合方法。 Tsai [84] 在1999 年用基于计算自由度的Grübler-Kutzbach 公式的列举法综合了一类三自由度并联机构。 基于并联机构自由度计算的一般Grübler-Kutzbach 公式为 ( ) 1 1 = = ??+ ∑ g i i M d n g f (1.1) 式中M 为机构的自由度数; d 为机构的阶; n 为机构的杆件数(包括机架); g 为运动副数; i f 为第i 个运动副的自由度数。 当给定机构的自由度数M 后,根据(1.1)寻求机构的每个分支运动链的运动副数。并联机构属于空 间多环机构,其独立环路数l 可以由下式给出 l = g ?n +1 (1.2) 该式即为著名的欧拉环路公式。将上式带入(1.1)中,可得到 =1 ∑= + g i i
f M d l (1.3) 定义并联机构中第j 个分支总的自由度数为 j C ,则有下式成立 =1 =1 ∑=∑ mg j i j i C f (1.4) 将(1.4)代入(1.3)消去 i f 后得到 ∑= + m j j C M d l (1.5) 对于分支运动链结构相同,且分支数等于机构自由度数的对称并联机构,又有以下条件成立m = M且l = M ?1 (1.6) 把(1.6)代入(1.5)消去l 后得到 = ?+1 j d C d M (1.7) 由上式在已知d 和M 时,可以得到分支运动链的自由度数 j C ,从而给出分支运动链。例如,d =3, M =3时,由式(1.7)可得 j C =3,分支运动链可以是RRR、RPR、PRR 等。并联机器人机构构型方法研究 1 0 寻找可以生成{ } gi L 的分支运动链,此时可利用位移子群乘法运算的封闭性获得不同结构的分支。 Hervé和Angeles 等较早将李群理论引入并联机构型综合。1978 年,Hervé [113] 基于位移群的代数结 构对运动链进行了分类,证明了所有六种低副所生成的运动都是位移子群,还给出了另外六种位移子群 以及子群间交集的运算法则,奠定了位移子群以及子群间交集的运算法则和位移子群综合法的理论基
并联机器人设计论文设计
并联机器人设计论文 摘要:并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。 关键词:三自由度并联机构;并联机器人;设计;
1.课题国外现状及研究的主要成果 少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。在Hunt之后,不断有学者提出新的少自由度并联机构机型。在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。在Tricept并联机床上采用的构型是由Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个副驱动支链并由导向装置约束动平台。Tsai通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。Rasim Alizade于2004年提出基于平台类型和联接平台的形式和类型进行分类的一种并联机构的结构综合和分类的新方法和公式,并综合出具有单平台和多平台的纯并联和串并联复联机构.我国燕山大学的黄真教授及其团队除了研制出解耦微型6维力传感器和微动机械,设计出一种新的
各类型机器人特点汇总
各类型机器人特点汇总 各种机器人的特点及应用简介 一机器人的定义及分类: 机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。工业机器人按其结构形式及编程坐标系主要分类为关节型机器人、移动机器人、水下机器人和直角坐标机器人等。按主要功能特征及应用分为移动机器人、水下机器人、洁净机器人、直角坐标机器人、焊接机器人、手术机器人和军用机器人等。机器人学涉及到机器人结构,机器人视觉,机器人运动规划,机器人传感器,机器人通讯和人工智能等许多方面,不同用处的机器人涉及到不同的学科,下面仅对这些机器人的结构和应用进行简单介绍: 二关节型机器人 关节型机器人的结构类同人的手臂,由几个转动轴,摆动轴和手爪等6~7个自由度组成。生产厂家主要有德国Manutec公司,德国KUKA,德国REIS,日本Motorman,日本Yaskawa 和沈阳新松等。关节型机器人的转动轴和摆动轴主要用伺服电机配几乎没有反向间隙的精密减速机或直驱力矩电机驱动,而其控制系统其难度也很大。各个厂家的关节型机器人其结构类同,主要差别在技术参数,下面以德国Manutec公司的关节型机器人为例介绍。 图1是Manutec公司型号为r15-30的6 自由度通用关节机器人,额定负载30公斤,最大可达到75 公斤,工作半径1.3 米,重复定位精度小于0.04 mm ,点到点的最大运行速度高达5.9 m/s,加速度高达23 m/s2和工作寿命20 年。可以坐立式安装,可以是掉挂式安装,也可以与水平面小于30度角的斜式安装,不影响其各项技术指标。r15可以选配防爆式的,也可以选配一级洁净式等。 r15-30主要特点是强度大刚性好和重复定位精度高,主要应用领域是其它厂家的关节型机器人由于刚性和精度不够无法应用的领域,而用5 轴加工中心成本太高或无法胜任的工作。如磨齿,异形铣削,壳(腔)内部铣削,磨,抛,切割和焊接等。 在手爪末端可以配力传感器,来加工异形表面(如铣削,磨和抛)。一个机器人也可以与双工作台及各种的双旋转轴协调同步运动。也可以是两个机器人协调同步工作,如一台机器人抓取工件,而令一台机器人对该工件进行加工,两台机器人同步协调完成特定的加工轨迹。其它厂家的关节机器人主要应用在汽车焊接和装配等任务中。关节型机器人的优点是可以从不同角度不同方位来工作,速度快,工作效率高。但主要缺点是工作半径小,负载小,价格高,应用难度大和维护费用高。 作为关节机器人的简化型机器人SCARA就是两个摆动轴和一个上下运动轴,其特点是简单,经济,适合工作空间小,负载小、高速搬运。但它的价位高于直角坐标机器人,应用行业和数量非常小。 三特种机器人 移动机器人就是能自主移动或上下楼梯的电动车,主要用于生产现场货物的自主运输和排险作业,或进入有污染和放射的环境内取样及监视等。还有一些移动机器人就是仿造一些动物,用腿和爪行走路的行走机器人,如美国的军用狗,还处于适用阶段。水下机器人与潜艇能自主潜入水下完成对海上钻井平台的水下建筑、发电站的水下闸门、海底打捞等工程的录像和监控。洁净式机器人主要是穿上防护衣的关节型机器人,使其自身有良好的密封性,不把灰尘带入工作现场,自身也不会产生灰尘,他们主要应用于电子器件,食品和药品等生产中。国际对洁净机器人的洁净度有明确的定义。军用机器人主要是小型移动车,遥控飞机或电子
机器人的基本结构原理
教案首页 课程名称农业机器人任课教师李玉柱第2章机器人的基本结构原理计划学时 3 教学目的和要求: 1.弄清机器人的基本构成; 2.了解机器人的主要技术参数; 3.了解机器人的手部、腕部和臂部结构; 4.了解机器人的机身结构; 5.了解机器人的行走机构 重点: 1.掌握机器人的基本构成 2.弄清机器人都有哪些主要技术参数 3.机器人的手部、腕部和臂部结构 难点: 机器人的手部、腕部和臂部结构 思考题: 1.机器人由哪些部分组成? 2.机器人的主要技术参数有哪些? 3.机器人的行走机构共分几类,请想象未来的机器人能 否有其它类型的行走机构?
第2章概论 教学主要内容: 2.1机器人的基本构成 2.2机器人的主要技术参数 2.3人的手臂作用机能初步分析 2.4机器人的机械结构构成 2.5机器人的手部 2.6机器人的手臂 2.7机器人的机身 2.8机器人的行走机构 本章介绍了机器人的基本构成、主要技术参数,人手臂作用机能,在此基础上对机器人的手部、手腕、手部、。机身、行走机构等原理及相关的结构设计进行讨论,使学生对机器人的机构和原理有较为清楚的了解。 2.1机器人的基本构成 简单地说:机器人的原理就是模仿人的各种肢体动作、思维方式和控制决策能力。 不同类型的机器人其机械、电气和控制结构也不相同,通常情况下,一个机器人系统由三部分、六个子系统组成。这三部分是机械部分、传感部分、控制部分;六个子系统是驱动系统、机械系统、感知系统、人机交互系统、机器人-环境交互系统、控制系统等。如图2-1所示。
●是由关节连在一起的许多机械连杆的集合体, 关节通常分为转动关节和移动关节,移动关节允许连杆做直线移动,转动关节仅允许连杆之间发生旋转运动。 个主要部●常规的驱 接地与臂、腕或手上的机械连杆或关节连接在一起,也可以使用齿轮、带、链条等机械传动机构间接传动。 ●感知系统 ....由一个或多个传感器组成,用来获取内部和外部环境中的有用信息,通过这些信息确定机械部件各部分的运行轨迹、速度、位置和外部环境状态,使机械部件的各部分按预定程序或者工作需要进行动作。传感器的使用提高了机器人的机动性、适应性和智能化水平。 ●控制系统 ....其任务是根据机器人的作业指令程序以及从传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能。若机器人不具备信息反馈特征,则为开环控制系统;若具备信息反馈特征,则为闭环控制系统。根据控制原理,控制系统又可分为程序控制系统、
工业机器人内部结构及基本组成原理详解
工业机器人内部结构及基本组成原理详解 工业机器人详解 你对工业机器人有着什么样的了解?关于工业机器人,我们过去也反反复复推送了很多的文章,在这一次,我们将尝试解决有关---在工业环境中使用的最常见的机器人和作业时经常会遇到的问题。关于工业机器人定义什么可以被 认为是一个工业机器人?什么不能被称为工业机器人?工业机器人直到最近才能避开这种混乱。不是在工业环境中使 用的每个机电设备都可以被认为是机器人。根据国际标准组织的定义,工业机器人是一种可编程的三自由度或多轴自动控制的可编程多用途机械手。这几乎是在谈论工业机器人时被接受的定义。工业机器人自中年以来发生了什么变化?越来越多的工程师和企业家正在寻找越来越多的机器人技术,帮助在工业环境中优化工作流程的方式。随着时代的发展和机器人技术的进步,机器人手臂必须为诸如仓储中使用的群组AGV等新手铺路。我们经常说典型的工业机器人 由工具,工业机器人手臂,控制柜,控制面板,示教器以及其他外围设备组成。那么这些是什么?这些部分通常都在一起,控制柜类似于机器人的大脑。控制面板和示教器构成用户环境。工具(也称为末端执行器)是为特定任务设计的设备(例如焊接或喷涂)。机器人手臂基本上是移动工具的
东西。但并不是每个工业机器人都像一个手臂。不同机器人有不同类型的结构。控制面板--- 操作员使用控制面板来执行一些常规任务。(例如:改变程序或控制外围设备)。应用“机器人工人” --------- 什么时候应该使用工业机器人而不是人工?相信这个问题大家思考的次数并不少了。理想情况下,这应该是双赢的。想快速看到效果,你需要知道什么是别人最不喜欢的工作。想得最多的是那些重复的,乏味的工作,需要从工作人员那边进行大量单调的行动,这个思考是正确的,因为正是如此,例如从一个输送机到另一个输送机。如果总是相同的任务,您可以使用专门针对您的需求量身定制的自动化解决方案。工厂的工作处理需要越来越灵活,在这些情况下,正确的解决方案是:可以试用用于不同任务的可重新编程的机器人进行任务操作。此外,就是那些对人类工作有害的任务。(例如:用危险化学品进行表面处理,这是在有害环境中工作。在许多情况下,长期使用机器人比聘用工人更聪明和便宜。)当然,还有的是人类难以操作的工作。(例如:举或搬运重物或在不适合人类生活的条件下工作。)同样,在许多这些情况下,可以应用特定的自动化解决方案。然而,如果任务需要灵活性处理,还需要考虑要用到的机器人。以下是最常见的机器人应用程序列表:电弧焊、部件、涂层、去毛刺、压铸、造型、物料搬运、选择、码垛、打包、绘画、点焊、运输,仓储关于工业机器人的
机器人设计方案
机器人设计方案 一、设计要求 设计一具有独立前进、转弯、后退、避障、救人等功能的救援机器人。 二、设计任务 1.电子控制组:设计好控制电路及原理图,各类传感器电路及稳压电源,并制作成 独立模块,按程序要求进行调试(超声波、雷达和红外线传感器的感应距离)。 2.机械设计组:设计机器人各部分结构(包括机械手、身躯、底盘)以及各类传感 器模块的安装。 3.程序设计组:按照具体设计要求进行编程及调试、烧录等工作。 三、设计思路 机器人在封闭场地内利用红外线传感器自动搜索安装了红外线发射管的洋娃娃。 一旦发现目标便向目标靠近,途中发现障碍物则侧移距离L或转弯角度a然后继续前进,当机器人与洋娃娃之间距离达到S(此时红外线传感器比超声波传感器或雷达优先级更高)时,触发控制机械臂抓向小人,机械臂的“手指”部分装有压力传感器(或轻触开关代替触觉传感器实现),当抓紧小人时触发单片机控制(入口设一200W 白炽灯光感返回或者程序倒退返回)机器人返回,并翻转电机松开洋娃娃。 四、场地模拟 有一封闭场地并设立一入口, 反转松开小人并复位。 五、机器人运作流程图:
六、 电路模块设计 1.超声波发射电路:
2.超声波接收电路: 4.红外线接受电路 5.直流电机的驱动电路 6.5V 与12V 直流电源电路 7.压力或触觉传感器 8.步进电机驱动电路(1):
步进电机驱动电路(2) 环境虚拟到内存以二维数组 存储(一个元素代表一个固 机器行走时记录行走过的位 置(只有正向行走时才记录)。 机器人救援分成三部分:循迹、 救援、返回。循迹又分找到前 和找到后(大概方位)。 4、 个部分流程图如下: 机器人俯视图 可以保证只接受到一个直线放 向的红外线而不被其他方向的 红外线干扰,在机器人前方装 有5个或7个红外线接收头,数目越多搜索越精确。
ABB_ROBOT_Program(抓手机器人配伺服焊钳)
ABB抓手机器人点焊程序 MODULE ProgramStart 模块ProgramStart PROC main ( ) VelSet 100, 5000; 定义速度100%,最大5000mm/s; AccSet 100, 100; 定义加速度100%,最大100mm/s2; CheckWorldZone; 调用子程序CheckWorldZone; InitSystem; 调用子程序InitSystem;初始化系统 WaitTime 0.2; 等待0.2秒; !TD_1_OFF; WHILE TRUE DO 进入循环; WaitUntil di10_Initiate_Style=1; 待到信号di10_Initiate_Style=1时执行下一步; ProcessStyle; 调用子程序ProcessStyle; TEST gi_Style 根据组信号gi_Style的值,执行不同的子程序; CASE 1: 当gi_Style=1时调用程序Style1; Style1; CASE 2: 当gi_Style=2时调用程序Style2; ! Style2; CASE 20: 当gi_Style=20时调用程序Style20; ! Style20; CASE 24: 当gi_Style=24时调用程序Style24;换帽 ! Change Tip; Style24; CASE 27: 当gi_Style=27时调用程序Style27;步增 ! Reset Step; Style27; CASE 29: 当gi_Style=29时调用程序Style29;修磨 ! TipDress; Style 29; CASE 31: 当gi_Style=31时调用程序Style31;维修 ! Maitain; Style 31; DEFAULT: 如果gi_Style不等于以上任何一个值就执行以下程 序; SetDO do47_Process1Fault,1; 将输出信号do47_Process1Fault置为1; UiMsgBox\Header:="Program Number Out Of Range","Program Number InCorrect"\ MsgLine2:="IRC5 Received Number: "+ValToStr(n_gi_Style)\ MsgLine3:="Please Select OK For Retry"\ Buttons:= btnOK\Icon:=iconWarning\result:=nPressedKey; 标题显示"Program Number Out Of Range"(程序号gi_Style输入超出范围),第一行提示信息“Program Number InCorrect”(程序号gi_Styl错误的),第二行提示信息"IRC5 Received Number:
全转动副三自由度并联机器人设计说明书资料
河北工业大学城市学院 毕业论文 作者:周** 学号:***** 系(专业):机械系 专业:机械设计与制造及其自动化 题目:全转动副三自由度并联机器人 指导者:李** 教授 (姓名) (专业技术职务) 评阅者: (姓名) (专业技术职务) 2015 年6月11 日
目录 1 绪论 ........................................................................................................................ - 4 - 1.1 引言 .............................................................................................................. - 4 - 1.2 此次课题研究背景和意义 ........................................................................ - 4 - 1.3 串并联机器人的国内外研究现状、使用范围及发展趋势 ...................... - 5 - 1. 4 本次毕业设计主要完成工作 ..................................................................... - 6 - 1.4.1 基本内容 ............................................................................................ - 6 - 1.4.2 课题研究拟采用的手段和工作路线 ................................................ - 6 - 2 总体方案的设计 .................................................................................................... - 7 - 2.1 总体布局的设计 ....................................................................................... - 7 - 3 由基本参数选定标准件的型号 .......................................................................... - 10 - 3.1 减速机的选择 .......................................................................................... - 10 - 3.2 选择伺服电机并对其检验 ...................................................................... - 12 - 3.3 轴承的选择及校核 .................................................................................... - 15 - 3.4 联轴器的选择 .......................................................................................... - 17 - 4.1 支链尺寸的确定 ........................................................................................ - 19 - 4.2 对主动轴尺寸的确定及校核 .................................................................... - 20 - 4.3 对支链上转动副的设计 ............................................................................ - 22 - 4.4 支链末端设计 ............................................................................................ - 25 - 5 机构的整体布局设计及机架设计 ...................................................................... - 2 6 - 结论 ...................................................................................................................... - 29 - 参考文献 .................................................................................................................... - 31 - 致谢 ............................................................................................................................ - 32 -
六轴关节机器人机械结构
六轴关节机器人机械结构 上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。此种结构较好的解决了工业机器人的管线布局问题。对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题。 机器人的腕部结构常见有如下几种结构:
在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等. 关节设计: 对于国外的工业机器人主要制造国家来说,六轴关节机器人的研发设计及制造已经有好几十年的历史了,整个工业机器人的研发制造体系较为完善,他们的技术相对来说比较成熟,他们在相互竞争中可以相互模仿、改善、不断推陈出新,他们的技术对于国内来说,近乎完美.而国内目前这个行业还处在黎明前的黑暗阶段,虽然有不少公司有这个研发意图,或者正在研发途中,不管怎么说,浮出水面公布自己正在研发或者研发成功的公司应该说是极少数,即使宣布自己研发成功,也只是初步试验成功,真正产业化、商品化还有一段相当漫长的路要走.而更多的公司还停留在项目立项、技术评估、投入风险分析的阶段.由于国内做这个行业的很少,相关的结构也没有什么可参考的,技术储备不足,少数的单位或个人有机会能够拆拆别人的机器,拆个一知半解,更多的人只能在旁边看看了(比如说我,想拆都没机会^_^),还好了,网络资源丰富,今搜集到不少机械结构方面的图片,分享给大家参考,希望咱们做机械设计的(我应该也算是个机械工程师啊^_^毕竟我也是做机械的)少走点弯路,做出更好的机器. 六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动.小型的六轴关节机器人的腕部关节主要采用谐波减速器.下面的图片较为详细的描述了常见的六轴关节机器人的腕部结构.
并联机器人技术方案
并联机器人方案 一、并联机器人用途: 并联机器人作为一种新型的机器人形式得到了越来越多的应用,与串联机器人相比该型机器人具有结构简单、刚度大、承载能力强、误差小等特点,与串联机器人形成了良好的互补关系。可用于六自由度数控加工中心、航天器对接机构、汽车装配线、运动模拟器、岩土挖掘、光学调整、医疗机械等领域。 二、系统特点: 1、机构采用并联式结构,按工业标准要求设计,结构简单、速度快; 2、控制系统采用Windows系列操作系统,二次开发方便、快捷,适于教学实验; 3、提供教材、实验指导书等,内容涵盖机器人运动学、动力学、控制系统的设计、机器人轨迹规划等。 三、系统配置: 1、机器人本体、控制柜、电机控制卡、控制软件、理论教材及实验指导书。附属件配置有钻铣刀头、电主轴、绘图笔架、加工平台、手动夹具,另赠送一套加工所需原材料。 2、并联机器人加工装置(用电主轴本体、夹持器及钻铣刀)。 3、绘图装置(绘图笔架及绘图笔)。 4、并联机器人加工平台及工件夹持装置。 5、部分加工演示原材料(石蜡、尼龙等)。
六自由度并联机器人1.并联机器人系统照片 2.并联机器人技术参数:
3.机器人型号:RBT-6T01P(全步进电机驱动) 机器人报价:175000.00元机器人型号:RBT-6S01P(全伺服电机驱动) 机器人报价:195000.00元 六自由度并联机器人 1.并联机器人系统照片 2.并联机器人技术参数:
3.机器人型号:RBT-6T02P(全步进电机驱动) 机器人报价:155000.00元机器人型号:RBT-6S02P(全伺服电机驱动) 机器人报价:175000.00元 六自由度桌面型并联机器人 1.并联机器人系统图片
机电一体化典型实例
. 8 机电一体化系统典型实例 8.1 机器人 8.1.1 概述 机器人是能够自动识别对象或其动作,根据识别,自动决定应采取动作的自动化装置。 它能模拟人的手、臂的部分动作,实现抓取、搬运工件或操纵工具等。它综合了精密机械技 术、微电子技术、检测传感技术和自动控制技术等领域的最新成果,是具有发展前途的机电 一体化典型产品。机器人技术的应用会越来越广,将对人类的生产和生活产生巨大的影响。 可以说,任何一个国家如不拥有一定数量和质量的机器人,就不具备进行国际竞争所必需的 工业基础。 机器人的发展大致经过了三个阶段。 第一代机器人为示教再现型机器人,为了让机器人 完成某项作业,首先由操作者将完成该作业所需的各种知识(如运动轨迹、作业条件、作业 顺序、作业时间等)通过直接或间接的手段,对机器人进行示教,机器人将这些知识记忆下 来,然后根据再现指令,在一定的精度围,忠实地重复再现各种被示教的动作。第二代机器 人通常是指具有某种智能(如触觉、力觉、视觉等)的机器人,即由传感器得到的触觉、听 觉、视觉等信息经计算机处理后,控制机器人完成相应的操作。第三代机器人通常是指具有 高级智能的机器人,其特点是具有自学习和逻辑判断能力,可以通过各类传感器获取信息, 经过思考做出决策,以完成更复杂的操作。 一般认为机器人具备以下要素:思维系统(相当于脑),工作系统(相当于手),移动系 统(相当于脚),非接触传感器(相当于耳、鼻、目)和接触传感器(相当于皮肤)(图8-1)。 如果对机器人的能力评价标准与对生物能力的评价标准一样,即从智能、机能和物理能三个 方面进行评价,机器人能力与生物能力具有一定的相似性。图8-2是以智能度、机能度和物 理能度三座标表示的“生物空间”,这里,机能度是指变通性或通用性以及空间占有性等;物 理能度包括力、速度、连续运行能力、均一性、可靠性等;智能度则指感觉、知觉、记忆、 运算逻辑、学习、鉴定、综合判断等。把这些概括起来可以说,机器人是具有生物空间三座 标的三元机械。某些工程机械有移动性,占有空间不固定性,因而是二元机械。计算机等信 息处理机,除物理能之外,还有若干智能,因而也属于二元机械。而一般机械都只有物理能, 所以都是一元机械。 8.1.2 机器人的组成及基本机能 信息处理机 图8-2生物空间 图8-1机器人三要素
并联机械手式三维打印机结构设计
本科毕业设计(论文)说明书并联机械手式三维打印机结构设计 学院机电工程学院 专业班级机械工程及自动化五班 学生姓名 学生学号 指导教师 提交日期2014年5月28日
毕业设计(论文)评语: 毕业设计(论文)总评成绩: 毕业设计(论文)答辩小组负责人签字: 年月日
摘要 三维打印技术是集机械、自动控制、计算机科学、材料学等为一体的先进制造技术。本文首先介绍了三维打印技术的基本原理和特点,以及三维打印技术的发展现状和关键技术。接着阐述并联机器人的机构原理和特点,还有它的发展国内外发展情况。然后通过选题背景及设计目的引出如今三维打印机存在的问题,比如成型精度和速度等。 本文是对并联机械手式三维打印的整体结构设计。着重于机械手的机构的设计,简单性地说明打印机的整体设计。 在机械手的机构设计部分,需要建立运动学模型。对于机器人的控制系统来说,运动学正解和运动学反解都是不可避免的。还有一个重要点是并联机器人的尺度综合。尺度综合是并联机械手设计的重要内容,速度、精度、刚度、工作空间是评价并联机械手系统性能的重要指标。 机械手的机构设计完成后,因为是基于并联机械手的三维打印机,还需要讨论三维打印机的整体设计,这也是为了能将并联机械手和三维打印机很好地结合为一体。对于部分结构,本文会予以重点讨论。 关键词:三维打印技术,并联机械手,运动学模型,尺度综合
Abstract Three-dimensional printing technology is one of the advanced manufacturing technology of machinery, automatic control, computer science, material science etc.. This paper first introduces the basic principle and characteristics of 3D printing technology, as well as 3D printing technology development status and key technology. Then it elaborates the mechanism principle and the characteristic of the parallel robot, and the development of its domestic and foreign development. And then through the background and the design objective leads now 3D printer problems, such as molding speed and precision. This paper is the overall structure design of parallel manipulator type of three-dimensional printing. The design focuses on the manipulator mechanism, the simple description of the overall design of the printer. In the design of manipulator mechanism part, needs to establish the kinematics model. For the control system of robot, kinematics and inverse kinematics is inevitable. Another important point is the synthesis of parallel robot. Synthesis is an important content of design parallel machine, speed, precision, rigidity, the working space is an important index for evaluating the performance of parallel manipulator system. The mechanism of robot design, because it is a 3D printer parallel manipulator based on, also need to discuss the overall design of 3D printers, this is to be the good combination of parallel manipulator and a 3D printer as a whole. For part of the structure, this paper will be focused on. Keywords: 3D printing technology, parallel manipulator, kinematics model, dimension synthesis Key words: Multivariable system, Predictive control, Environmental test device