大风浪中船舶顺浪斜顺浪航行的危险及对策

大风浪中船舶顺浪和斜顺浪航行的危险及对策
赵月林 (大连海事大学航海学院,辽宁大连,116026)
摘要:本文探讨了大风浪中顺浪航行的危险和产生这些危险的机理。从稳性降低的角度考虑,当船长与波 长接近、波速与船速接近时顺浪航行危险最大;从尾淹和打横的角度,当波长超过两倍船长、波速与船速 接近时顺浪航行危险最大;从横摇的角度,顺浪或者斜顺浪航行较顶浪或者斜顶浪航行更容易发生横谐摇。 根据对这些危险的机理分析,并结合有关的理论研究成果和实际操船实践,提出了各种船舶顺浪和斜顺浪 航行的操纵措施。 关键词:顺浪和斜顺浪航行;稳性降低;尾淹和打横;横谐摇;船舶操纵
前言
所谓顺浪航行通常是指船尾正后方左右各 15°方向来浪航行的方法,而斜顺浪航行通 常是指正横后大于 45°到正后方 15°范围内来浪航行的方法。顺浪或斜顺浪航行,可能是 基于航次计划的需要;也可能是基于大风浪操船的需要,例如,在避台操纵中,当船舶位于 台风路径的进路上或者可航半园时,往往需要通过偏尾受风的方式斜顺浪航行驶离台风中 心,又如,在顶浪航行或者滞航中仍然经不起波浪袭击的船舶,可以采用顺浪航行。然而, 虽然顺浪航行具有降低波浪对船的相对速度从而大大缓解波浪对船舶的袭击,同时船舶在风 浪中可以保持较高的船速,有利于摆脱风浪区等优点,但是顺浪或斜顺浪航行中仍然存在船 舶稳性降低、出现尾淹和打横、横谐摇等危险。本文试图从探讨产生这些危害的机理出发, 并结合有关理论研究和实际操船实践,针对不同的船舶,提出大风浪中船舶顺浪或斜顺浪航 行的适用条件和操纵注意事项。
一、船舶在波浪中的稳性变化
1. 顺浪航行 顺浪航行,当船长与波长接近相等时,如图 1 所示,当波峰处于船中附近时,由于水线 面面积惯性矩减小等原因,导致复原力矩明显变小,船舶稳性降低;当波谷处于船中附近时, 水线面面积惯性矩将增加,复原力矩将增加,船舶稳性提高。
图 1 船中在波峰和波谷中时水线面面积惯性矩的变化
事实上这种复原力矩变化导致船舶稳性的变化,无论船舶是在顶浪航行还是顺浪航行中 均存在,只是在顶浪航行中,船舶与波浪的相对速度大,持续时间短,这种船舶稳性的变化 对船舶安全的影响不大而已。而在顺浪中,由于船舶与波浪的相对速度小,这种稳性的变化 对船舶的影响较大,因此,复原力矩的变化主要考虑顺浪航行中的情况。
顺浪航行中这种复原力矩的变化,与波长和船长的关系、波速和船速的关系、载态以及 波高等因素有关。当波长与船长接近相等,波速与船速接近相等时,就可能导致波峰始终处 于船中附近,从而导致船舶复原力矩的持续减小,从而使船舶的稳性减小甚至消失而存在倾 覆的危险。当船长远远超过波长时,这时船舶将跨越两个波峰或者波谷,船舶复原力矩的变
1
化将减小,这种由于复原力矩减小而倾覆的危险性将大大降低。当波长大大超过船长时,船 舶将处于波浪的上坡段或者下坡段,船舶复原力矩的变化也将大大降低。当船速与波速存在 显出差异时,船舶复原力矩的变化将呈现周期性的变化,船舶倾覆的危险将大大降低。波高 越大,船舶水线面面积惯性矩的变化也越大,复原力矩的变化也越大。从船舶的载态看,当 船舶重载或者吃水较大时,这种复原力矩的变化将有所减小。
文献[1]对“怀河”轮集装箱船在波高为 2m、波长与船长相等(114m)的波浪中顺浪航 行中船舶初稳性高度和大倾角复原力矩进行了计算。该轮在静水中的初稳性高度为 1.45m 时,当其船中位于波峰时初稳性高度只有 1.13m,在大倾角时的复原力矩也将大幅度减小, 且船舶横倾角越大,当船中在波峰中时的复原力矩的减小越大。也就是说,当船舶存在大倾 角横摇时,船舶更容易出现倾覆现象。
从上述分析可以看出,从稳性降低的角度考虑,顺浪航行对船长与波长接近、波速与船 速接近的船舶的危险性最大。
鉴于大洋中最容易产生的波浪的波长是 80~140m,相应的波速为 11.2~14.8m/s,因此, 从船长角度,大洋上顺浪航行对于船长为 80~140m 左右的中小型船舶的危险性较大,但是 由于这种中小型船舶(集装箱船舶等船速较高的船舶外),往往难以达到波速,其危险性相 对减小,即使能够达到与波速相接近的船速,仍然可以采取大幅度减速的措施,使得船速与 波速产生显著差异,从而减小船舶因顺浪航行而使复原力矩减小的危险性。
对于大型船舶而言,由于其船长较长,在顺浪航行中往往跨越两个波峰或者波谷,这 种波浪对船舶复原力矩的影响较小,其顺浪航行的危险性较小。
对于小型船舶而言(如渔船),当其在沿海水域遭遇到波长较短的风浪时,一方面由于 风浪的波长较短,另一方面由于沿海水域水深较浅,波浪的速度减小,这样使得容易满足船 长与波长接近、船速与波速接近的条件,从而使得船舶的稳性降低甚至消失,容易出现船舶 倾覆的危险。
实际上,船舶是在不规则波中航行,因此,其遭受的是一系列不同波长、不同波速、不 同波高的波浪,任何船舶尤其是中小型船舶均有可能遭受波长与船长接近、波速与船速接近 的波浪,从而使得船舶的稳性降低。
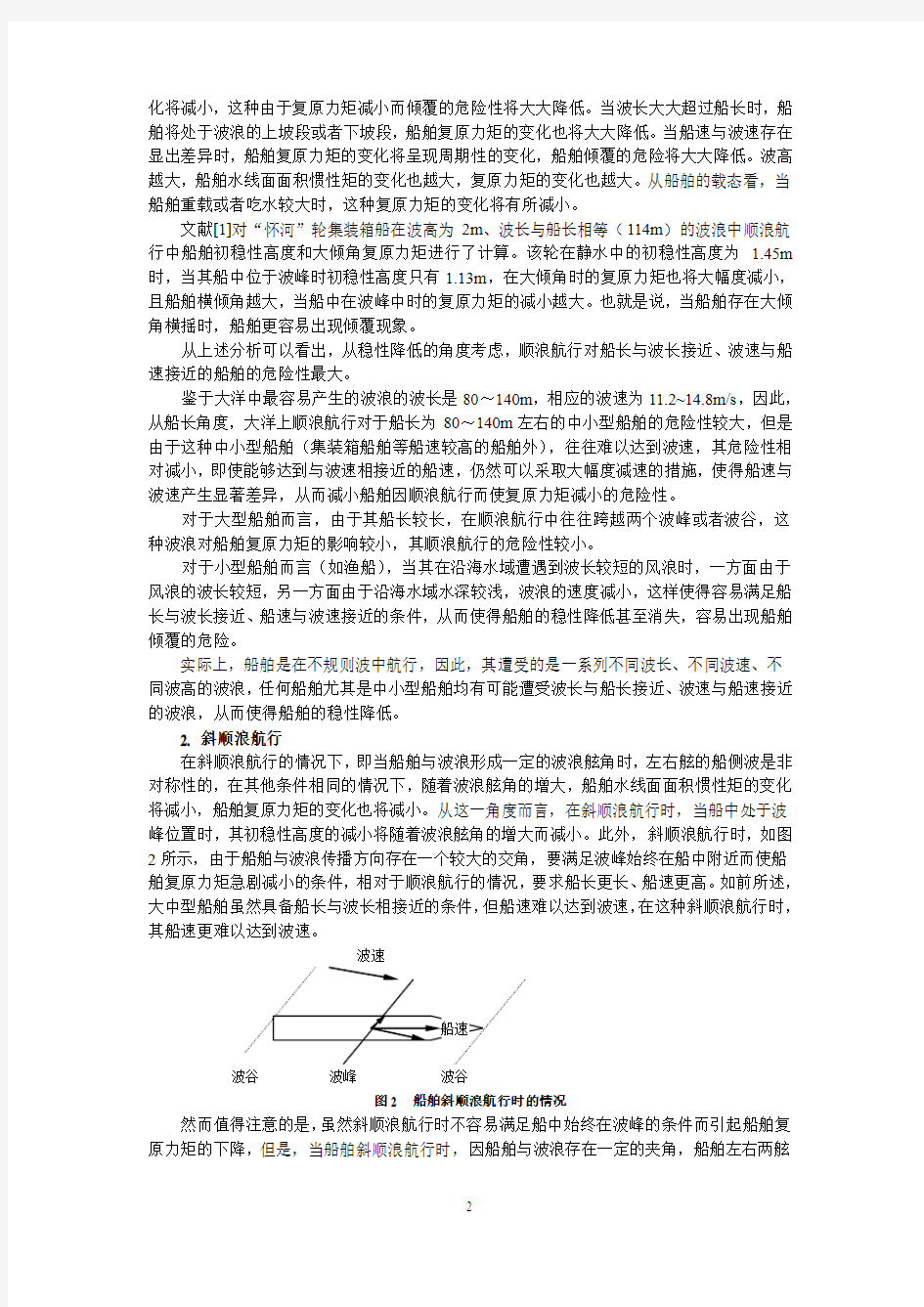
2. 斜顺浪航行 在斜顺浪航行的情况下,即当船舶与波浪形成一定的波浪舷角时,左右舷的船侧波是非 对称性的,在其他条件相同的情况下,随着波浪舷角的增大,船舶水线面面积惯性矩的变化 将减小,船舶复原力矩的变化也将减小。从这一角度而言,在斜顺浪航行时,当船中处于波 峰位置时,其初稳性高度的减小将随着波浪舷角的增大而减小。此外,斜顺浪航行时,如图 2 所示,由于船舶与波浪传播方向存在一个较大的交角,要满足波峰始终在船中附近而使船 舶复原力矩急剧减小的条件,相对于顺浪航行的情况,要求船长更长、船速更高。如前所述, 大中型船舶虽然具备船长与波长相接近的条件,但船速难以达到波速,在这种斜顺浪航行时, 其船速更难以达到波速。
波速
船速
波谷
波峰
波谷
图 2 船舶斜顺浪航行时的情况
然而值得注意的是,虽然斜顺浪航行时不容易满足船中始终在波峰的条件而引起船舶复
原力矩的下降,但是,当船舶斜顺浪航行时,因船舶与波浪存在一定的夹角,船舶左右两舷
2
所受的波浪浮力不同,如图 3 所示,船体在波浪的浮力的作用下,在作用于船体浸水部分的
倾斜力矩的作用下,船舶将产生一个初始横倾角,该初始横倾角将随波浪舷角的增加而增加。
船舶在横摇过程中,这种倾斜力矩可能使船舶的横摇角度加大,尤其是当船舶的固有横摇周
期与波浪遭遇周期相接近的情况下。因此,从这一方面考虑,斜顺浪航行可能较顺浪航向更
为危险。
从实际的情况看,斜顺浪航行较顺浪航行更危险。
波 浪 浮 力 产 生 的 倾 斜 力 矩
图 3 船舶斜顺浪航行时波浪浮力产生的倾斜力矩
二、顺浪航行中的尾淹和打横
船舶顺浪或斜顺浪航行中,当船尾陷入比船速快的波谷时,浪打上船尾甲板,称为尾淹。 此时,船与波的相对速度很小,波通过船的时间较长,打上海水的机会就多。打在甲板上的 海水,一方面使得船舶载荷增加,储备浮力减小;另一方面甲板上的海水可看作是自由液面 对稳性的影响,将使船舶的稳性降低。当船尾干舷低或者排水不畅时,这种影响更甚。此外, 严寒时还有结冰的危险。从尾淹的角度看,当波浪的速度略大于船速时,船尾将周期性地上 浪。
船舶顺浪或斜顺浪航行时,当船舶处于波浪的下坡段(追逐波的前倾斜面)时,由于船 舶首尾所受的水压力不同,使得船舶航向稳定性(直线运动稳定性)变差,同时由于作用在 船尾左右两舷的波浪力不同,在船舶上作用一个使船舶转向横浪的力矩,从而会出现航向不 稳定状态,甚至突然产生首摇而横于波浪中,即所谓打横(broaching-to)。此时,瞬间产生 很大的横倾,袭来的波浪打到船上便会使船陷入非常危险的境地。
波峰
波速
波谷
轨圆运动速度
船速
轨圆运动速度
图 4 波浪水质点运动产生的偏航
上述现象产生的原因是由于水质点的轨圆运动,使得处于波浪不同位置处的船首和船 尾受有不同的水压力。如图 4 所示,在波峰处,水质点的轨圆运动速度与船速方向一致,船 尾部与水的相对速度降低,水动力减小,而在波谷处,水质点的轨圆运动速度与船速方向相 反,船首部的相对速度增加,水动力增加,从而使得船体周围水压力的分布发生了变化,即 船舶水动力作用中心向船首方向移动,使得船舶的直线运动稳定性变差。事实上,这种船舶 在波浪中航向稳定性变差的情况同样出现在顶浪或者偏顶浪航行中。只是由于在顺浪或者斜 顺浪航行中,由于波浪和船舶的相对速度小,波浪作用的时间长,这种现象更为显著而已。
3
当船舶运动方向与波浪传播速度方向存在一夹角时,船首、船尾所作用的水动力产生 的水动力力矩将均使船舶转向横浪。
从上述的定性分析可以看出,这种打横现象的严重程度主要取决于下列因素: (1)水质点的轨圆运动速度。波高越大、波浪周期越小即水质点轨圆运动的频率越高, 水质点轨圆运动的速度越大。这种情况下,船体周围水压力的变化越激烈,船舶航向稳定性 变差的现象越严重。 (2)波长、船长与波向角的配合恰好使得船尾处于波峰而船首处于波谷时。也就是说, 顺浪航行中,当波长约为 2 倍的船长,而船尾恰好处于波峰、船首处于波谷时,船舶最容易 出现打横现象。 (3)波浪持续作用时间。当波浪的传播速度在船长方向上的分量与船速相等或接近相 等时,波浪作用时间长,这种打横现象也容易发生。 (4)波浪与船首向的夹角。当波浪与船首向存在一定夹角而使得船舶所受的波浪转船 力矩最大时,最容易发生打横现象。 (5)船舶本身的操纵性能。船舶航向稳定性和保向性差的船舶,容易受外界波浪的影 响而容易出现打横的现象。 在船舶在顺浪航行中打横的定量研究,主要有数学模拟方法和试验方法,总结有关数学 方法的模拟结果以及船模试验的统计结果,船舶容易发生打横的条件是[2]:波长船长比= 1.0~2.5;船速近似平均波速;船体位于波浪的下坡段;波高与波长之比大于等于 1/25;斜 顺浪航行中,波浪舷角为 20°~30°之间;方形船尾受波浪冲击面大,容易受轨圆运动水质 点横向分力的扰动,其打横的发生率要大于椭圆形船尾。 结合容易产生尾淹和打横的条件以及大洋上最容易产生的波浪的波长是 80~140m,相 应的波速为 11.2~14.8m/s 的情况,可以看出,当船长超过波长的 1.5 倍(即 120~210m)时, 船舶将至少横跨两个波峰,船舶的纵摇幅度较小,一般不会产生激烈的尾淹和打横现象,而 小型船舶或者中型船舶在长浪中顺浪或者斜顺浪航行,则可能容易出现尾淹和打横现象。
三、横谐摇
当船舶的固有横摇周期与波浪的遭遇周期相等或接近相等时,船舶将产生横谐摇从而导
致激烈的横摇。其中波浪的遭遇周期可以利用下式计算:
TE=
C
?
? V cos?
……………(1)
鉴于大洋上常见的波长位于 80~140m 之间,200~300m 的波长很少遇到,选择波长为
100~250m 作为船舶遭遇大风浪的波长,已经具有很好的代表性。1船舶固有横摇周期主要与
船宽以及船舶的初稳性高度有关,但其值均有一定的范围,一般货船的固有横摇周期为空载
时 7~10s,满载时 9~14s;超大型油船空载时都在 6s 以下,满载时在 14s 以上;渔船 4~
8s。为此,笔者分别针对固有横摇周期分别为 8、10、12、14、16、18、20s 的船舶在波长
为 100、150、200、250m 的波浪中顺浪或者斜顺浪航行时发生横谐摇的船速进行了计算。对
计算的结果进行分析,可以得到如下结论:
(1)船舶固有横摇周期很小时,只有其在遭遇波长较小的波浪时,在顺浪或者斜顺浪
航行时,才有可能发生横谐摇,并且只是在船速较低时发生。例如固有横摇周期为 10 以下
的船舶,在波长为 100m 以上的波浪中不发生横摇的谐振。固有横摇周期很小的小型船舶在
波长较短的波浪中顺浪或斜顺浪航行容易产生横谐摇。
(2)对于船舶固有横摇周期较大的船舶(如 18~20s),只有以较高的船速顺浪或斜顺
1 世界上主要海洋中经常发生的最大波长如下:南印度洋 236m,南大西洋 210m,北大西洋 168m,中国南 海 78m。参见:冯铁城等编,《船舶操纵与摇荡》,国防工业出版社,1989 年版,第 104 页。
4
浪航行时,才会出现横谐摇。 (3)对于船舶固有横摇周期为 12~16s 的船舶,当其遭受不同波长的波浪时,其发生
横谐摇的船速范围较宽。例如,固有横摇周期为 16s 的船舶,当其以 8~12kn 的速度航行时, 均有可能产生横谐摇。而这一横摇周期恰恰是船舶配载中建议的杂货船的横摇周期,2因此, 该类船舶在顺浪或斜顺浪航行中应特别注意。在此范围内,横摇周期相对较小的船舶在波长 较长的波浪中不易发生横谐摇,而在波长较短的波浪中顺浪或斜顺浪航行则容易出现横谐 摇。固有横摇周期越小的船舶,在不同波长的波浪中顺浪或斜顺浪航行时产生横谐摇的船速 越低,因此,固有横摇周期较小的船舶在顺浪或斜顺浪航行中降低船速反而会提高出现横谐 摇的可能性。
图 5 为顺浪或斜顺浪航行时不同固有横摇周期的船舶在不同波长的波浪中发生横谐摇 的临界船速。图中,粗实线与细线之间的区域为船舶固有横摇周期为 20s 时遭遇 100~250m 波长的波浪时发生横谐摇的船速区间;斜线部分为船舶固有横摇周期为 16s 时遭遇 100~ 250m 波长的波浪时发生横谐摇的船速区间;斜线以下部分的区间为船舶固有横摇周期为 12s 时遭遇 100m 以上波长的波浪时发生横谐摇的船速区间。
横谐摇时的船速(kn)
波长100m固有周期20s 波长250m固有横摇周期16s
35
波长250m固有横摇周期20s 波长100m固有周期12s
波长100m固有横摇周期16s
30
25
20
15
10
5
0 120 125 130 135 140 145 150 155 160 165 170 175 180 波浪角度(顺浪为180)
图 5 不同固有横摇周期的船舶在不同波长的波浪中发生横谐摇的船速
四、顺浪斜顺浪航行的对策
1. IMO 操纵指南有关内容 针对船舶顺浪或斜顺浪航行的安全问题,IMO 海上安全委员会在 1995 年 10 月 19 日以 707 号通函(MSC/Circ.707)的形式对船舶在顺浪和斜顺浪航行中避免危险情况的操纵方法 提出了一些建议。[3]该指南认为,在船舶顺浪或斜顺浪航行时,存在两种遭遇危险现象的条 件,即: (1)当船速较高且其在波浪传播方向的分量接近波速时,船舶将被加速,进而产生冲 浪和打横(Surf-riding and broaching-to)。发生冲浪和打横的临界速度是1.8 L 。在临界速 度以下还有一个临界区域(1.4 L ~1.8 L )(见图 6),在该区域内可能会发生大幅度的 纵荡运动,其危险程度几乎与冲浪相同。在上述情况下,稳性在较长的时间内可能大大降低
2 海上航行的杂货船的横摇周期希望不小于 9s,一般认为 15~16s 较为适宜。参见:陈桂卿等编:《船舶货 运》,大连海运学院出版社,1991 年版,第 85 页。
5
从而引发船舶倾覆的危险。
(2)当船速沿着波浪方向上的分量与波群速度大约相等,也即约等于主波速度的一半
时,船舶将会受到连续的巨浪冲击,连续 冲击的预计最大波高可达到相应海区观测 波高的大约两倍。在这种情况下,稳性降 低、横谐摇运动、不定横摇运动(Parametric rolling motion)或综合危险现象都可能发 生,从而引发船舶倾覆的危险。
针对上述危险向船长提出了如下操纵 指南:
(1)避免冲浪和打横 为避免冲浪和打横,船长应降低船速 至使其小于1.8 L (kn)。这时,应注意, 即使在船速低于1.8 L 情况下,还可发生 危险的大幅度纵荡运动。较长时间的明显 纵荡加速是危险的大幅度纵荡运动的标 志,在这种情况下,船长应进一步减速,
ψ =0 3.o0
10o
V 2.8
L
2.6
20o 30o
2.4
冲浪区域(1)
2.2
2.0
40o 50o
1.8
1.6
临界区域(2)
60o
1.4
1.2
区域(3)
1.0
70o
0.8
0.6
80o
0.4
0.2
0
90o
图 6 冲浪引起的危险区域
避开该临界区域(1.4 L ~1.8 L )。
ψ =0o
3.0 V
10o 20o
3.0
T
2.8
30o
2.8
2.6
2.6
2.4
40o
2.4
2.2
2.2
2.0
50o
2.0
1.8
1.8
1.6 危险区域
1.4
1.2
1.0
60o 70o
1.6
V cos? T 1.4
1.2
1.0
0.8
0.8
0.6
0.6
80o
0.4
0.4
0.2
0.2
0
90o
0
图 7 遭遇巨浪的危险区域
1.0
0.5
0
T
TE
(2)避免连续的巨浪冲击 当平均波长大于 0.8L 和有义波高大于 0.04L 时,同时,船舶的某些危险运动指标较为 显著时,船长应注意不要进入图 7 中所示的“危险区域”。如船舶位于这一危险区域,应降 低船速以避免巨浪的连续冲击。图中,V ——船舶的实际速度(kn);T —— 平均波浪周期 (sec),即使用 s 表测量海平面上浪花的起伏运动周期;TE —— 遭遇波周期(sec),使用 秒表测量船舶的纵摇周期获得。为脱离危险区域也可以改变航向。然而,航向不应改变太大, 因为它可能对稳性产生不良影响。适当降低船速与较小的航向变化相结合,是船舶操纵的另
6
一种选择(见图 7)。当遭遇周期约等于观测周期的两倍(约 1.5~2.8)时,船舶被认为位 于危险区内。
(3)避免横揺摇运动、不定横摇运动 当波浪遭遇周期 TE 与船舶的固有横摇周期 TR 大约相等时,船舶将发生横谐摇;当 TE= TR/2 的情况下,将发生大的较大的横揺运动,即不定横揺运动。船长应当避免这两种横揺运 动。如图 6 所示,遭遇周期 TE 是 V/T 的一个函数,利用这一关系,船长可以判断船舶是否 将产生谐摇或不定横摇运动。 当为避免以上临界条件而进行减速时,船长应考虑到在大风浪中保持航向的最小船速。 2. 不同船舶在顺浪航行中的操纵方法 尽管 IMO 操纵指南给出了有关船舶顺浪航行时的操纵建议,但其建议是原则性的,本 文将结合前述产生危险的机理、IMO 操纵指南和有关的理论或模型试验的研究结果,对船 舶操纵措施进行分析。 从前述产生危险的机理分析可以看出,从船舶稳性或者说复原力矩的降低以及尾淹的角 度考虑,顺浪航行对船长与波长接近、波速与船速接近的船舶的危险性最大;从打横的危险 考虑,当波长超过 2 倍船长、波速与船速接近时顺浪航行的危险性最大;从横摇角度考虑, 船舶固有横摇周期较大的船舶只有以较高的船速顺浪或斜顺浪航行时发生横谐摇,而固有横 摇周期在 12~16s 左右的船舶,在遭遇波长较短的波浪时容易发生横谐摇。因此,针对不同 的船舶,在顺浪航行时,应当采取不同的对策。 1. 大型船舶(船长超过 150m) 该类船舶一般不具备同时满足船长与波长接近、船速与波速接近的条件,更难满足波 长超过 2 倍船长、波速与船速接近的条件,因此,船舶顺浪航行或者斜顺浪航行中出现稳性 降低而倾覆或者尾淹和打横的危险较小。根据冲浪和打横的临界船速为1.8 L 、发生危险 纵荡运动的临界船速区间为(1.4 L ~1.8 L ),对于船长为 150m 的船舶而言,该临界船 速区间为(17.1~22)kn,除集装箱船和客船外,一般船舶难以达到这一临界船速。因此, 对于船长超过 150m 的船舶顺浪航行一般不容易发生冲浪和打横现象。即使出现较为严重的 冲浪、尾淹和打横现象,果断地采取降低船速的措施,将有利于大大缓解这些现象。 大型船舶因其船舶宽度较大,相对而言,其固有横摇周期较大,只有以较高的船速顺 浪或斜顺浪航行时,才会出现横谐摇。即使发生可能发生横谐摇,采取减速措施将避开谐摇 区。 2. 中小型船舶(船长为 50~150m) 中小型船舶因其船长很容易接近大洋上常见的波长,顺浪航行船速较高时,或者斜顺浪 航行时,容易出现船舶复原力矩降低、稳性消失现象,中小型船舶更多的是由于稳性的减小 而存在倾覆的危险。因此,对于船尾干舷较低、稳性较差的船舶不宜采用顺浪或斜顺浪航行 的方法。不得不采取顺浪或斜顺浪航行时,采取大幅度的减速措施,不仅有利于缓解船舶的 纵摇和垂荡,而且也有利于使船速和波速产生一个较大的差值从而缓解船舶复原力矩降低、 稳性消失等现象。 同时,中小型船舶也容易满足波长超过 2 倍船长、波速与船速接近的条件,因此,航向 稳定性差和保向性较差的中小型船舶在顺浪或斜顺浪航行时,容易出现尾淹和打横的危险。 文献[4]给出了顺浪航行时防止突然打横的限制航速:
V ? 1.35 L ……………(2) 其中,V 为船速(kn); L 为船长(m)。 这一限制航速也符合 IMO 操纵指南中的船速应当避开(1.4 L ~1.8 L )这一临界区 域的建议。 此外,中小型船舶的固有横摇周期一般多在 12~16s 范围内,当其遭受不同波长的波浪
7
时,其发生横谐摇的船速范围较宽,因此,其在顺浪或斜顺浪航行中容易发生横谐摇,尤其 是当其遭遇波长与船长接近的波浪时。并且在这种情况下,轻微改变船舶的航向很难避免这 种谐摇。因此,为避免这种谐摇,采取适当的降低船速的措施是较好的选择。
根据学者对船长为 115m 的集装箱船的数学模拟研究表明[5],顺浪航行或者斜顺浪航行 时波浪对船舶倾覆的影响的主要结论是:在顺浪航行中,波长与船长的比值在 1.25~1.50 的 范围内,船舶容易倾覆;在斜顺浪航行中,波浪舷角为 30°时,波长与船长的比值在 1.25~1.75 的范围内,船舶容易倾覆;在波浪舷角为 60°时,船舶不容易发生倾覆;在船速方面,船 速越大,越容易出现倾覆的倾向。另外,针对某船长为 148m 的万吨级集装箱船的耐波性研 究也表明[6],顺浪航行较斜顺浪航行更为安全;并且无论是斜顺浪航行还是顺浪航行,船速 越高,安全性越低。
综上所述,中小型船舶在波长接近或者超过船长的波浪中顺浪航行或者斜顺浪航行,均 存在稳性降低、尾淹和打横、横谐摇等危险,并且斜顺浪航行较顺浪航行更为危险。在顺浪 或斜顺浪航行中,降低船速均是避免稳性降低、尾淹和打横、横谐摇等危险的有效措施,斜 顺浪航行时应避免从船尾 20°~30°受浪。固有横摇周期较小的船舶,为避免横谐摇的危险, 降低船速的措施应当慎用。
3.小型船舶(船长小于 50m) 船长较小的小型船舶(如渔船),容易满足波长为船长的 2 倍、波速与船速相接近的条 件,容易出现尾淹和打横的现象。同时,由于小型船舶的固有横摇周期较小,在波长较短的 波浪中航行容易引发横谐摇。因此,小型船舶不宜采用顺浪或斜顺浪航行的方法。有关船舶 在顺浪航行中模型试验结果也表明了小型船舶容易出现稳性消失或者打横而倾覆的现象。3 小型船舶不得不顺浪航行时,常采用从船尾放出 5~7 条缆绳,在其前端缚以轮胎等重物, 或者放出若干条夹棕绳,使船尾迎风的滞留方法,俗称“放捞子”,该方法不仅能够能够起 到稳定船舶航向的作用,而且还能够起到减轻船舶横摇的作用。[7]对于其他小型船舶,顺浪 时可在船尾拖曳一曳航物,如大缆、阻链、海锚等,提高船舶的航向稳定性。 在小型船舶采用顺浪航行时,以较低的船速顺浪或者斜顺浪航行较为安全,有关大风 浪渔船安全评估的研究结果[8]也表明了这一点。
五、结论
根据前述的分析,可以得出如下结论: (1)大型船舶较宜采用顺浪或者斜顺浪航行的方法。该类船舶在顺浪或者斜顺浪航行 中不易发生复原力矩减小或者打横现象,即使发生这种现象,采取减速措施即可缓解。 (2)中小型船舶在波长超过船长的波浪中顺浪航行或斜顺浪航行,均存在稳性降低、 尾淹和打横、横谐摇等危险,并且斜顺浪航向较顺浪航行更为危险。船舶稳性差或者货物容 易移动以及船尾干舷低、保向性差的中小型船舶不宜采用顺浪或斜顺浪航行。在顺浪或斜顺 浪航行中,降低船速是避免各种危险的有效措施,斜顺浪航行时应避免从船尾 20°~30°受 浪。固有横摇周期较小的船舶,为避免横谐摇的危险,降低船速的措施应当慎用。 (3)小型船舶(如渔船)不宜采用顺浪航行。不得不顺浪航行时,可在船尾拖曳一曳
3日本在北海道的大沼湖中进行过的自航船模倾覆试验表明:渔船在顺浪以及尾斜浪中航行时,倾覆的可能 性最大;渔船倾覆的机理至少有三种:稳性不足;尾斜浪航行中,船连续受陡浪冲击,当第一大浪打上甲 板时,后续第二大浪就会使船舶倾覆;顺浪航行时,船舶因大量海水打上甲板而倾斜,当船中处于波峰时, 船因丧失稳性而倾覆。美国在顺浪中的自航模试验表明:倾覆的客观条件是波长比船长大,且船速较高, 在波峰来到船模中央附近的短时间内,出现近于麻痹状态,在波浪越过船舷打上甲板后,稳性显著下降, 横摇周期加大,则构成倾覆的条件。英国国家海事研究所的自航模试验也表明:在斜顺浪航行中,即使甲 板无上浪现象,当船中处于波峰时,船舶的稳性急剧下降,船舶横摇角变大,也易于倾覆。这些模型试验 的结果均转引自:朱瑞源,渔船在风浪中的稳性,中国航海学会海洋船舶驾驶专业委员会《海浪与船舶航 行安全及防抗台经验研讨会论文集》,1998.11.
8
航物,如大缆、阻链、海锚等,提高船舶的航向稳定性。
参考文献
[1] 吴善刚,船舶在随浪航行时的稳性计算,中国航海学会海洋船舶驾驶专业委员会《海浪与船舶航行安 全及防抗台经验研讨会论文集》,1998 年 11 月,第 51-60 页。
[2] 陶醉等,船舶横甩及随浪操纵对策研究综述,《海军工程大学学报》,2001 年 2 月(第 1 期);第 28- 33 页。
[3] Guidance to the Master for Avoiding Dangerous Situations in Following and Quartering Seas, MSC/Circ.707, 19 October 1995.
[4] A. H . 霍洛季林,《船舶耐波性和在波浪上的稳定措施》,北京:国防工业出版社,1980。 [5] 王敏厚编译,船舶在随浪及斜随浪中倾覆的原因分析,《青岛船员学院学报》,1996 年第 3 期,第 65-
80 页。 [6] 徐今晖,船舶在大风浪中航行的安全性研究,大连海事大学硕士论文,1996 年。 [7] 姚杰,渔船操纵性模拟研究及大风浪中操纵措施的探讨,大连海事大学硕士论文,1993 年 。 [8] 王云天,大风浪中渔船的安全性评估与决策,大连海事大学硕士论文,1995 年。
Dangerous Situation in Following and Quartering Seas and Countermeasures
Zhao Yuelin (Navigation College, Dalian Maritime College,Dalian, 116026)
Abstract: Firstly, the dangerous situation in following and quartering seas and their mechanisms were investigated. From view of reduction of stability, when the ship’s length and speed are nearly equal to the length of wave and wave velocity respectively, it is the most dangerous for a ship sailing in the following seas. From view of pooping and broaching-to, when the length of wave exceeds two times of ship’s length and ship’s speed is nearly equal to wave velocity, it is the most dangerous for a ship sailing in the following seas. From view of synchronous rolling, it is easier to have a synchronous rolling in following and quartering seas than in heading and bowing seas. Based on above investigation and combining with appropriated theoretical investigation result and ship handling practice, ship handling measures for various ships in following and quartering seas were proposed.
Key Words: Sailing in the Following and Quartering Seas; Reduction of Stability; Pooping and Broaching-to; Synchronous Rolling; Ship handling
9
浅谈大风浪中船舶航行安全
毕 业 论 文 二○一三年十月┊┊┊┊┊┊┊装 ┊┊┊┊┊┊┊订┊┊┊┊┊┊┊线 ┊┊┊┊┊┊
内容摘要 摘要:在众多海况中大风浪对船舶安全航行的影响可谓首当其冲,大风浪航行既是一个复杂的理论问题,同样也是一个严峻的实践问题。对大风浪安全航行方法的探讨历来也是不绝于耳,本文就结合当前许多在大风浪中船舶安全航行的研究成果以及自身在船舶航行中的实践经验,提出了船舶在大风浪航行中应当做出的准备以及航行中安全操纵避让方法,以保障船舶在大风浪中能够安全航行,提高船舶的经济效益。 据此,本文分析了大风浪的等级划分以及在航行实践中一般对大风浪风级及浪高的定义,以及大风浪对船舶安全航行的不利的影响。然后根据船舶在大风浪中实际受到的影响,提出在大风浪来临之前,应当从船员的心理上以及船舶的设备上做好抵御大风浪的准备。最后,综合大风浪实际对船舶的不利影响以及船舶做出的相应准备,提出了适合船舶在大风浪中安全航行的几种航法以及相应避让措施,从而保证船舶在大风浪中能够安全航行。并且结合了自己在船舶实习期间,船舶在经历大风浪中,本船所采取的的相应措施以及航行避让的方法,来验证了自己所提出的船舶航行避让方法。 本文的研究能够为船舶在大风浪中的安全航行提供科学依据,并可为公司岸基支持以及海事机构安全监督提供相应的决策参考。 关键词:大风浪,不利影响,船舶安全航行,航行方法 Abstract: Big waves is the biggest effect of ship’s safe navigation in the numerous sea conditions. It is a complex theoretical problem, and is also a serious practical problem. Lots of method discussion has been heard. In this paper, combining with the current research results about ship’s safe navigation in the big waves and the practical experience in the navigation of the ship of myself, I put forward the ship sailing preparation on the big waves and the voyage manipulation avoidance method, in order to ensure ship’s safe navigation in the big waves and improve the economic benefits of ship. On this basis, this paper analyzes the hierarchy of stormy waves as well as general definition of a great wind scale wind and wave height in the navigation practice, and big waves for the adverse effects of the safe navigation of the ship. Then according to the actual effect in the big waves, I put forward psychological and the ship's equipment shall be ready to withstand rough seas before the big storm coming. In the end, according to the above all ,I put forward the suitable method of ship’s safe navigation in the big waves and collision avoidance corresponding measures, to ensure that ships can safe navigation in the big waves. During experiences of my internship, the corresponding measures and the method of collision avoidance taken by the ship sailing, to verify the proposed method of sailing ship collision avoidance. This article is able to provide a scientific basis for safe navigation of ship in rough seas, and provide the decision-making reference shore-based support of the company and maritime safety supervision. Keywords:Big waves ;Adverse effects ;Ship's safe navigation ;Navigation method
船舶安全航行管理制度(标准版)
( 安全管理 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 船舶安全航行管理制度(标准 版) Safety management is an important part of production management. Safety and production are in the implementation process
船舶安全航行管理制度(标准版) 1.船舶开航前必须按《最低配员证书》要求,配备足够数量的合格持证船员,船员必须严格遵守制度,提前回船准备开航工作,不许无故耽误船舶开航。 2.开航前,船长应组织船员召开航前会议。研究部署装载和航行计划,落实安全措施,并把会议内容记录在《航行日志》中。 3.各船员按自己的岗位职责,开航前对自己负责的航行设备、操纵设备、信号设备、消防设备、救生设备、机械设备、堵漏器材实行全面检查,发现问题及时报告船长、船东或公司,并采取相应措施,消除隐患后再开航。船长应把发现的隐患和整改措施记录于《航行日志》以备日后查阅。 4.自卸砂船严格按《货物装载手册》装载,装砂后立即把砂推平、推匀,确保船舶装货之后处于正浮状况,严禁超载运输。 5.自卸砂船装砂时,同时开启抽水泵,抽出舱内积水,防止积
水形成自由液面影响船舶稳性。 6.船舶航行期间,驾驶台应保持安静;不能从事对航行无关的其他活动,防止分散当班人员的精神。 7.航行中,当班人员应严格遵守航行规章,在感潮河段坚持靠右航行的原则,加强了望、慎重驾驶、使用安全航速。夜间航行正确使用夜航灯号,会船时确保与来船统一会船信号后再驶过。 8.船员应当熟练掌握雷达、GPS等导航设备的使用,并善于使用船上的导航设备协助了望,及早发现接近船舶、做出正确判断,及早采取相应措施。 9.船舶在桥区水域航行时,应按助航标志标示的通航桥孔通过,并与桥墩保持足够的安全距离,禁止在桥区水域内追越、掉头、试航或并排航行。 10.当班人员应当注意收听天气预报和搜集航行安全信息,遇到雷雨大风等危险天气,立即报告公司,及早做好防范措施,选择安全水域锚泊。 11.船舶进出港口,应主动向海事机构办理船舶进出港签证手
船舶视频监控方法
船舶动态与视频监控系统的设计与实现 0.引言 近几年,我国海上运力、运量直线上升,但由于海上环境特殊,缺乏有效的监管技术手段,目前海上安全生产问题已成为制约海运业(特别是滚装船)发展的突出因素[1]。借助高科技手段对船舶动态与视频进行全方位的监控,建立高效的船舶管理与预警系统,是保证船舶航行安全的必然选择。 传统的船舶动态监控系统是利用船载GPS和通信设备(大多是海事卫星C站)把船舶航行的动态信息(船位、航速、航向)传回陆地指挥中心,指挥中心能在大屏幕电子海图上观察到船舶的分布情况、运动轨迹,能够查询相关信息,对船舶进行调度管理等等[2,3]。 目前,国内外海上船舶管理是以船舶报告系统和VTS为代表,以雷达、高频电话和AIS(船舶自动识别系统)技术为手段[4,5],存在显示不直观(只能将船舶作为一个质点来管理),系统扩展性不强等缺点,在远海则只能以卫星通信来补充,运行费用昂贵。 国外现有的船舶视频传输系统基本上是针对远洋航行的船舶,采用卫星通信方式,通过船载F 站实现船舶静态图像传输,但由于其费用高而较少被采用。随着我国公众移动通信技术的发展,本文提出用CDMA1X无线网络传输船舶视频图像与船舶动态信息。 由于涉及动态信息和视频信息的传输,岸船之间的信息传输问题便成了船舶动态和视频监控系统所要解决的主要问题。对于海上移动通信来说,目前主要有以下几种方式:(1)海事卫星C站或F站,其优点是信号覆盖全球,缺点是带宽窄,比如使用海事卫星F站传输视频只能达到64K 的带宽,而且设备昂贵(约2.5万美元/台)和通信费用高(6.5美元/分钟),只有在紧急状态下使用,很少用于日常的安全管理。(2)VHF(VeryHighFreqency)和SSB(SingleSideBand),主要用于话音通信。(3)GSM、GPRS和CDMA技术,这几种技术都适合近岸航行的船舶进行岸船通信,但对于中国海域的海上业务来说,GSM和GPRS的信号覆盖不如CDMA广,传输带宽也不如CDMA宽。比较上面几种岸船通信技术,利用CDMA1X无线传输技术实现近岸船舶动态与视频监控是较理想的选择。 CDMA1X无线接入理论速率153.6Kbps,目前,有些地区1路CDMA1X信道实际带宽为80kbps,而对于海上通信来说,由于环境特殊,实际上1路CDMA1X带宽可能更窄。这样,采用1路CDMA1X 信道来传输船舶视频信息,实际监控效果较差。本文采用多路CDMA1X信道捆绑来增加带宽技术传输视频信息,达到了良好的监控效果。由于动态信息的传输对带宽的要求不高,本文仍采用1路CDMA1X信道传输动态信息。同时由于CDMA1X传输信道不稳定以及海上环境的复杂性,要在一定的传输率限制的条件下取得最好的视频质量,就必须采用相应的优化策略。本文先对CDMA1X无线网
大风浪航行须知
大风浪航行须知 1 目的 旨在规范船舶在大风浪中的航行和操纵,保证船舶在大风浪中航行安全。 2 适用范围 适用于船舶在大风浪中的航行和操纵。 3 职责 3.1 船长全面负责船舶在大风浪中航行安全工作。 3.2 驾驶员和轮机员负责组织实施,并督促相关人员做好准备工作。 4 航行中的船舶根据预报可能有大风浪来临之前,应全面检查并进一步保证做好下列准备工 作。 4.1 按须知文件《船舶水密检查须知》进行检查,确保船舶水密。 4.2 确保船舶排水畅通。 4.3 确保船舶稳性,做好压载工作。 4.4 做好应急准备: 检查驾驶室与机舱、船首、舵机室的通讯联系的有效性,并保证其畅通无阻; 检查天线、舵设备、应急电机等,确保其处于良好状态; 保证消防救生和堵漏设备随时可用; 检查大型物件的固定情况,防止移位和翻倒; 检查主、副机的滑油循环箱液位,防止吸空; 日用燃油柜液位保存高位并进行放残; 防止滑油及燃油滤器堵塞,确保备用滤器处于随时可用; 增开一台发电机组,防止失电; 如有必要调整主机转速,防止飞车或转速进入临界区; 保证人身安全,如拉扶手绳、甲板铺砂等。 5 大风浪中的船舶操纵 在大风浪中航行,应根据本船的船型、稳性、吃水和海域等具体情况,采取不同的操纵措施,减轻船舶的横摇,缓和波浪的冲击,以等待海面恢复平静,或采取积极手段,尽早驶离大风浪海区。 5.1 顶浪航行 5.1.1 船在大风浪中顶浪航行,船首会受到波浪猛烈地冲击,使船体剧烈纵摇;因而会对船舶结构 产生极有害的中垂或中拱现象,严重的可导致船体断裂。 5.1.2 由于风浪对船首的冲击力,同船和风浪相对速度平方与船舶排水量的乘积成正比,所以采取 减速措施,可以不受波浪冲击并保持纵向船体强度。 5.1.3 顶浪时的船舶纵摇,当纵摇周期小于波浪周期时,纵摇虽不重,但可能会使船首穿进浪中, 有时螺旋浆出现空转的“飞车”现象,中垂、中拱现象最严重,应尽量避免。 5.1.4 避免船首正面迎浪,保持船首与风流有一个合适的偏角(20度左右),适当保持尾倾对顶浪 航行有利。 5.1.5 船身较短、船首前伸、船首楼较高的船,以顶浪较为有利,操纵方便,不致使船首埋入浪中, 避免大量海水淹没甲板,并且可以保持车舵不受损坏。 5.1.6 船型细狭和船首垂直的船舶,顶风浪航行易致大量海水涌上甲板而使船首埋入浪中,应注意
远洋船舶视频监控系统设计方案
远洋船舶视频监控系统设计方案 1. 应用对象 运输船舶:实现运输船舶的本地视频监控管理、陆地视频监控管理和突发事件发生时的远程调度指挥,减少财产损失和保障生命安全,为水上交通安全提供有力的支持和保障。 海上救援:当发生海事事故或海上突发事件时,海上救助打捞船只及时救援抢险,实现陆地应急指挥中心对突发事件现场情况的及时掌控和调度指挥。 2. 整体设计 . 整体网络拓扑 整体网络拓扑图 整个系统分为陆地调度指挥中心、船舶集团监控中心及船舶无线视频监控管理系统。陆地调度指挥中心、船舶集团监控中心设置中心管理平台及显示大屏幕系统,实现把船舶无线视频监控在一个监控平台进行管理、控制。整体网络拓扑如图所示。 . 需求分析 船上的摄像机数量和安装位置
镜头1:安装在船头甲板上空对着甲板处,能看到船上甲板的实时情况。 镜头2:安装在船的左铉对着甲板左侧,能看到甲板左侧实时情况。 镜头3:安装在船的右铉镜头对着甲板右侧,看到甲板右侧实时情况。 镜头4:(可选待定)安装驾驶仓里面看到驾驶仓人员操作或驾驶仓后上面看到船的尾部。(可根船的结构改动镜头的位置和数量。) 设备需求 1、要求摄像机设备是防暴、防水、防腐、带有红外功能。 2、设备要求有升级空间、兼容以后发展的网络。如3G、4G 等相关的网络。 3、能够兼容以前的监控设备。 功能实现需求 1、能保证白天和晚上视频能看到甲板的实时情况。 2、船上的所有的视频能保存30天。 3、保证本地录像清晰流畅,在有信号情况下远程查看图像清晰流畅。 4、可以将以前的船舶监控整合到同一个操作平台上。 . 设计描述 根据以上需求,设计采用远程无线视频监控系统+船舶本地视频监控系统结合的方案,无线视频监控系统链路采用海事卫星和CDMA1x线路,保障无线通信稳定可靠。系统能够兼容下一代网络扩展,系统能够对原有系统进行利用改造。 其设计图如下:
谈影响船舶航行安全的因素及相关措施
谈影响船舶航行安全的因 素及相关措施 Revised by Hanlin on 10 January 2021
谈影响船舶航行安全的因素及相关措施【内容摘要】:为了切实推进船舶航行安全工作,保障安全形势的稳定,减少人民群众生命财产损失,达到航行更安全、海洋更清洁的目标,本文从“人、船、环境、管理”四个方面来具体分析船舶航行安全状况,并提出相应的措施。 [关键词]:船舶、航行安全、人、船、环境、管理、对策。 [Abstract]:inordertopromotethesafenavigationwork,toguaranteethe stabilityofthesecuritysituation,andreducethelossofthelivesandpr opertyofthepeople,achievemoresecurity,theseavoyagemorecleantarg et,thispaper,fromthe"people,ship,environmentandmanagement"foura spectsofthevoyagetotheanalysisofthesecuritysituation,andputforw ardthecorrespondingcountermeasure. [Keywords]:ships,navigationsafety,people,ship,environmentandman agement,strategy. (一)影响船舶航行安全的因素及原因 1.人的因素
(1)船员安全意识淡薄 船舶海上航行时,船员没有严格遵守《雾航规则》、《72海规》等规定,安全意识淡薄、责任心不强、思想麻痹、心存侥幸或以想当然的态度对船舶实施操纵。如2010年4月3日“SNHO.1”轮在澳大利亚大堡礁海洋公园附近水域搁浅事故就是因为大副接二副班后,大幅并没有测量到转向点的距离也没有测量到转向点的时间,只是想当然地认为到1700时转向075°就可以避开危险,在加上他非常疲劳,安全意识的淡薄促成了事故的发生。 (2)船员心理素质差 在船舶遇到紧迫局面或异常情况下,船员应急能力差,惊慌失措,没有那种顽强的战胜困难的意志与毅力,既不能运用良好的船艺,也不能采取果断有效的手段避免事故发生或减少事故的损失,一味的盲目地采取措施,或以消极的方式坐等事故的发生。 (3)船员技能不熟练 虽然技能与知识素有密切的关系,然而在本质上却各有其特殊的内容与要求。即使理论知识学得特别好,但没有从事船舶操纵的实际经
大风浪中船舶安全航行对策研究
大风浪中船舶安全航行对策研究 王家宏艾万政 (浙江海洋学院海运学院浙江舟山316000) 摘要:大风浪对船舶的安全航行带来不利影响。本文详细分析了风浪对船舶带来的安全隐患,并提出了减少风浪对船舶安全影响的应对措施,为广大操船者提供参考。 关键词:风浪;稳性;船体强度;共振;漂航 Safety Navigation Countermeasures under the Condition of Rough Seas Wang jia-hong Ai wan-zheng (Zhejiang Ocean University, Zhoushan 316000, China) Abstract: Rough seas can bring adversely affects to ship’s safety navigation. Adversely affects caused by rough seas to ship’s safety navigation is analyzed, and measures to decrease these adversely affects is also put forward as to provide references for seaman in this paper. Key words: Rough seas; Stability;Hull strength;Resonance;Drift navigation 1 引言 世界上大部分海区在不同季节均有大风浪区存在。例如在中国沿海,夏季台风过后会带来较大的风浪区;冬季常年偏北季风也容易形成风浪区。大风浪航行是船舶安全航行的重要环节。在大风浪中,船舶容易产生横摇、纵摇和垂荡等不利于安全的运动,这些运动给船舶的安全生产带来困难,稍有疏忽,容易导致机损、货损和海难事故。虽然大风浪能严重影响船舶的安全航行,但是作为船长和船员,如果做到防范有力和操船方法得当,完全可以将风浪对船舶安全的影响程度降低到最小。 2 风浪对船舶安全航行的影响 大风浪对船舶的航行安全带来不利影响。其主要影响表现在以下几个方面。 (1) 甲板上浪。由于风浪中船舶严重纵摇和垂荡,海面的大浪涌上甲板。上浪使甲板机械损坏,船舶稳性下降[1-2],给船员带来恶劣的工作和生活条件。 (2) 产生砰击。船舶在波浪中摇晃的同时,船体与波浪之间会产生猛烈的局部冲击。这种冲击多发生在船首部,特别是当船首柱底端或船底露出水面后,船体在遇波谷以极短的时间落入水中时产生的砰击最为强烈。严重的砰击容易使船首部的结构损坏,船体发生颤抖。(3) 螺旋桨飞车。船舶在波浪中航行时,部分螺旋桨露出水面,转速剧增,并伴有强烈的震 王家宏:男,汉族,1972年生,湖北潜江人,副教授,研究方向:船舶机电设备故障诊断,电话:018606801280,E-mail:jhwang@https://www.wendangku.net/doc/3e16995985.html,.
船舶生产监控系统方案
广新海事重工股份有限公司船舶生产监控系统要求 2011年9月
广新海工船舶监控需求分析 为了保证广新海工在船舶上作业人员财产及生命安全,以及提高施工管理水平,我们根据公司着手建立一套综合视频网络监控管理系统。该系统要求界面友好、操作简易、图像清晰、音频还原度高,并且能够有效的管理各公司的情况并记录下来,最终进行存档和查询工作。 总体技术指标: 1. 具有良好开放性的系统构架和拓扑结构,易于扩充、升级。 2. 用户端网络操作系统选用适合于多种媒体访问技术和多种高层协议的系 统。 3. 在用户端系统采用结构化布线,并利用已有的互联网络进行数据传输。 4. 网络拓扑采用了B/S体系,用户可随时增加或减少视频终端,而不会影 响其他终端正常工作。 5. 视频监控系统图象清淅,达到视频600线水平。 一、系统具体功能 1)能监控各船仓物品存放情况及状态、船仓内人员和设备工作情况。 2)要求系统智能、稳定、易操作; 3)系统要具有可扩展性,为以后增设监控点作预留扩展; 4)要求二十四小时监控,全方位,无盲点; 5)要求保安部门在监控中心随时看到公司的整体情况。 二、系统组成 由前端摄像、传输部分、存储部分、监控部分组成
E I F 3 三、网络视频监控拓扑图 A I 6 丨 匸 D ■? 5 R e v i s i o n n o b e e> *-2 ?J ? F g v t ! 广新海工船船监控平面不意图 办玄楼 二层 三层 岗亭 超五娄网线 船舶 HI 纸说明t 1. 峪船甲扳上各层各通址专用规戲觇纜连接到 控 制紺" 2. 蝸柏期过网络弱电蜒梅视频倍号将传输紛启 辜,岗亭将信号迪过5,80微披技输到办公楼 3. 打公楼人员可以通过电盼査肯各监揑点图悝 』、尚亭安装一台廉务器.W.存储. 乩网给监控系纯连接到企业呵域可以进行网 络管理,離护,以及ftR. A-^>WKHI ± S4F GAQTDNIT 4H8N E rnRitoxniL^ 甲聞乩 IftLI 单僅 Hl K t 卸£ fiTW “IS a it 苏小亘 囲号 U EB ■尊亂 II NI 3?II T H .M C i D i F i F C ] D I E I F ,■ it£A;Kft*a 广新海工船舶监控平面示意图 KihB-lt l^ I, I k i s J — f ?1 ? 'n r.T | I | HA ; | L | it* | m | 「 i?? J " |fB |j |fj |" IF er iin an I uh JUI JHI an r*n g 上khldUL aw ! , b-JI l 丄 ,久f/?环囲口平E FMIBJ)jtLDl9TailE 时JM1 鼻島拉料?!齡司 i 』iH AH EtH a H - 苏小三 M 号 - M M n fi
船舶冰区航行安全指导
第一部分冰区航行注意事项 一、收集、熟悉航行区域的冰区组织、通信联系、冰区引航点、破冰船只分布、破冰船队集合编组地点和破冰船队航行操作等情况。 二、按时收听冰况警告和报告,密切注视冰情动态,提高警惕及早预防。 三、开航前应检查自身船舶有无冰区加强和冰区加强的级别。充实船上的堵漏毯、木材、快干水泥、填塞物料等堵漏器材。并备足粮食、淡水及燃料等。 四、冰区航行时要注意冰对船速及操纵性能的影响。遇到来船应提前避让,狭水道航行时更应谨慎驾驶。 五、冰区航行,船壳、舵扇及车叶容易受损,必须谨慎驾驶,尽量避免倒车。空载或轻载时应设法增加尾吃水,使推进器和舵全部浸入水中。 六、在冰区航行,要警惕碎冰堵塞海底阀或主、辅机的冷却器而导致事故,尤其是轻载和空载船,必须使用低水位的海底阀,并作好必要的预防措施。如海底阀冰塞严重一时无法吹通,可通过管路的转换,引入压舱水临时作为冷却水使用。 七、加强了望,及时避开漂流大冰块,无法避让时,应降低船速以缓和撞冰的冲击力量。 八、应选择冰隙或薄冰处行驶,避免驶近迭堆的厚冰层。 九、如果无法避免与冰层接触时,应以船首与冰缘成直角接近,防止船头斜向冰层,造成船首滑开,损坏船壳或使船尾甩向冰缘,损坏螺旋桨和舵。 十、应尽量防止船身被冻结冰内,以防冰的压力对船壳造成严重损坏。
十一、船前部如被冰夹住不能动时,可采用以下办法使船脱出: 1.全速前进,左右满舵使船左右摇摆,松动夹冰,然后倒车退出。倒车时应用正舵,先开极慢倒车,待船尾冰块松动推离后,再开快倒车,以免车叶击冰受损。 2.如上述方法无效,可调整油水,设法使船身反复左右倾斜或船尾升、降,以松动夹冰,然后倒车退出。 十二、如冰况严重,航行确有困难,可联系附近港口,申请破冰船引航。破冰船引航时,应保持一定距离,密切注意该船的速度变化,加强联系,遵守引航规则。 十三、尽量不在冰区下锚,如果必须,应选择冰层最脆薄处下锚,锚链长度以不超过水深的两倍为宜(如锚链过长,冰移时容易导致断链)。应常备主机并值航行班,必要时立即起锚离去。 第二部分冰区航行的安全措施 (一)船舶进入冰区前的一般准备 1. 冰区集中于高纬度区域,气温低、海面有冰集聚、风力频繁短时间内快速激增。船舶进入冰区可能遇到很多意想不到的困难与风险。如:船员工作环境恶化,船舶各项工作的落实难度增大;操纵和控制船舶异常困难;船体可能意外变形;机械设备容易损坏,等等。因此,公司和船舶都要高度重视,提高认识,以最坏的打算,最好的准备,全力做好冰区航行工作。 2.保证水密设备完好。货舱、油舱和水舱所有舱壁要完全无渗漏,其透气管和量水管无破损;双层底的管系阀门都要保持正常状态;舱盖、人
大风浪对船舶航行安全的影响
编号:SM-ZD-32907 大风浪对船舶航行安全的 影响 Organize enterprise safety management planning, guidance, inspection and decision-making, ensure the safety status, and unify the overall plan objectives 编制:____________________ 审核:____________________ 时间:____________________ 本文档下载后可任意修改
大风浪对船舶航行安全的影响 简介:该安全管理资料适用于安全管理工作中组织实施企业安全管理规划、指导、检查和决策等事项,保证生产中的人、物、环境因素处于最佳安全状态,从而使整体计划目标统一,行动协调,过程有条不紊。文档可直接下载或修改,使用时请详细阅读内容。 风浪对船舶安全的影响 一、大风浪对航行安全的影响 船舶进入大风浪区域航行时,船舶将出现较剧烈的摇荡运动、降速、航向不稳定,以及由此引发的其他操纵方面的困难,甚至出现难以预料的危险。主要有以下几个方面: 1、大风带来的涌浪会增加船舶的航行阻力,降低航速,使船舶产生剧烈摇摆。顶浪航行时,由于缩短了涌浪与船舶的撞击周期,使涌浪的碰撞次数增多,撞击程度加剧,增大了对船体的危害。船长小于涌浪波长时,剧烈的纵摇会使螺旋桨露出水面空转,使船舶尾部受到强烈震动,有时会造成浆叶脱落、尾轴断裂,甚至尾壳破裂进水;船长与涌浪波长相近时,船舶有可能同时受到一个或两个波峰的作用,发生中拱或中垂现象,使船体结构变形,受到严重损伤,甚至船体断裂。顺浪航行时,如果船速低于波速而船舶又位于波谷中,则涌浪会冲击、淹没船尾,螺旋桨和尾轴会受到损害;
港口船舶动态监控系统建设方案
港口船舶动态监控系统建设方案 1.电子海图显示系统概述 电子海图作为在港口区域航行与作业的船舶监控的工作平台,直观快捷地向监控管理人员提供船舶在港口的当前位置和航行状态。对船舶的航行的信息存储,可以对船舶在港口区域的航行历史状态的查询和再现,为船舶的监控和管理提供强有力的保证。 本系统的电子海图数据平台采用代表我国官方水道测量组织的权威电子矢量海图数据,保证了电子海图数据的合法性和准确性,并且按照《中华人民共和国电子海图技术规范》和IHO(国际航道测量组织)的S-52,S-57标准进行设计,完全支持汉字。 在电子海图系统的平台上,结合岸基AIS系统(AISPORT)、AIS数据处理中心(AIS-Space),实现船舶基本信息管理、船舶动态信息管理和船舶监控报警等功能。电子海图将作为AIS系统的工作平台,辖区水域的AIS船舶数据可以直接叠加显示在电子海图上。 系统的软、硬件配置采用通用设备为主,便于用户维护和设备的更新。电子海图AIS的软件操作平台将采用Windows 2003/XP。硬件可采用通用的网络服务器。 2.系统功能 系统功能框架图如下图所示,系统由岸基AIS设备(AISPORT)、AIS数据处理中心(AIS-Space)、船舶信息管理、船舶监控报警、船舶动态信息分发、港口视频监控系统接口和电子海图综合显示软件等组成。
图 2-1 系统功能框架 岸基AIS设备(AISPORT):在港口位置较高的位置架设AIS基站的收发天线接收船载AIS设备发送的AIS动态信息,AISPORT对船舶进出港和靠泊的船舶动态进行采集。 AIS数据处理中心(AIS-Space):通过岸基AIS设备接受船舶AIS的信息可以获得船舶的静态信息,例如:船名、呼号、MMSI号等信息;船舶航行动态,例如:航速、航向、转向率等。将岸基AIS设备接收、采集的港口区域航行的船舶的AIS信息进行解析后统一的数据库存储,为后续的船舶监控和管理功能提供数据库支持。 船舶信息管理:对数据库存储的AIS信息进行分类整理,为电子海图的综合显示提供信息支持。 船舶监控报警:对当前港口区域的船舶进行监控,设置报警的条件,当在港口区域航行或作业船舶出现违反或满足报警条件时,提供报警信息。在电子海图综合显示界面上,向值班监控人员进行声光报警。 船舶动态信息分发:对采集和存储的船舶AIS信息进行授权的信息查询和分发,为系统的其他自系统提供船舶AIS信息,为将来的信息资源的共享和系统扩展提供支持。
船舶航行安全规则
船舶航行安全规则 第一章通则 第一条船舶航行时,值班人员须时刻牢记保证船舶航行安全就是首要职责。它包括开航准备,航行中的了望、避让、定位、海图作业与填写《航海日志》等所有保证船舶安全的各项工作。 第二条严格遵守各项规章制度与《驾驶台规则》,值班时不得随意说笑闲谈或做与岗位职责无关的事情,必须以严肃、认真的态度,确保航行安全。 第三条航行值班时间应按规定执行,每班必须有一名持有适任证书的驾驶员与二名胜任的水手值班。 第四条提前半小时叫班,交接班必须在驾驶台进行,值班驾驶员与值班水手应提前5——15分钟上驾驶台,做好接班工作。当双方确认交清接明,在《航海日志》上签名后,交班者方可离岗。 第五条当接近口岸、礁区、渔区、狭水道等险要地段,或在大风浪天气、能见度不良时,值班人员不准坐椅子。根据情况需要,船长有权临时增加值班人员。 第六条值班1600——2000班的人员用餐时,大副由三副代班,水手由水手长或空班水手代班,代班时按规定认真交接,用餐时间不得超过半小时,其它时间的值班人员用餐须等
到下班后进行。 第七条交班时间已到,无人接班或接班人员有意见分岐时,交班人员要继续履行其职责,不得离岗,并应立即报告船长作出决定,将情况记入《航海日志》。 第二章开航准备 第八条船舶必须具备各种有效的船舶证书,船舶设备及资料以及有关文本。 第九条船员人数配备不得少于国家规定的船舶安全最低配员标准。 第十条船员必须持有有效适任证书以及相关特种训练证书,并与所在船舶相匹配。 第十一条根据不同季节的特点,各待命点船舶要认真研究制定相应的安全措施,必须符合《海上救助待命船舶技术要求》的标准。 第十二条对救生、消防、堵漏、拖曳设备必须进行全面检查,使之处于良好的适用状态。 第十三条对航海仪器要进行检查试验,使之处于良好的适用状态。 第十四条检查航行灯、信号灯、信号旗、汽笛、电话、扩音机等就是否适用。 第十五条同机舱核对车钟、船钟、舵机指针与驾驶台的指针就是否一致。
浅谈船舶安全航行与人为因素
浅谈船舶安全航行与人为因素 2003年1月1日,《中华人民共和国船舶安全营运和防止污染管理规则》(简称《国内安全管理规则》或NSM规则)对国内跨省航行载客定额50人及以上的客船(包括客滚船、旅游船和高速客船)、150总吨及以上气体运输船和散装化学品船生效,至2007年7月1日,所有500总吨以上国内航行船舶均根据《国内安全管理规则》的要求建立实施了安全管理体系。《国内安全管理规则》的全面实施,促进了船舶安全管理水平的提高,从某种意义上讲“安全和防污染”是船舶管理这个问题的两个核心内容。加强船公司、船舶、船员和船长的日常管理,其中船公司是主体、船舶是基础、船员是重点、船长是关键,要将这四者通过安全管理体系这根链条连接在一起。 船舶安全一直是航运界非常关注的问题,长期以来,国家在船舶安全方面做了大量工作。然而,随着近年来航运业的快速发展,全球范围内的船舶碰撞、搁浅、火灾、爆炸、污染等事故屡屡发生,并造成了严重后果。综合分析这些事故,可以发现,影响船舶航行安全的因素主要有人为因素、船舶因素和环境因素三方面。 1.人为因素 人为因素主要是船员的误操作、责任心不强或人员素质不高等造成的事故。IMO在ISM规则中指出,海上事故的发生约有80%是由于人为因素引起的。因此,研究人为因素,客观分析航运中人员操作行为的风险并采取相应预防措施显得至关重要。
人为因素主要表现为人的心理、生理、行为能力等方面存在缺陷或问题,导致事故的发生成为可能。当驾驶员在船舶航行中处于不良的心理状态,如紧张、激动、孤独,就很容易造成感知错误,继而错误判断,再就是操作失误。生理因素主要包括船员身体健康程度和疲劳两方面。船舶长期在海上航行,船员不仅要能够长时间持续工作,还要承受不同航区气候的变化。因此,船员的身体健康与否会对船舶航行安全构成直接影响。同时,驾驶员的大脑疲劳在生理上表现为感觉迟钝,动作不准确且灵敏性降低,在心理上表现为注意力不集中,思维迟缓,反应慢,心情烦躁等,因此,疲劳会使不安全行为增加,船舶操纵质量下降,避碰反应速度变慢,导致船舶安全事故或潜在安全事故增加。 人的行为能力则较集中地体现在船员的专业技能上,它不仅与船员的知识有关,而且与经验、工作岗位和语言能力有关。如对航路不熟悉,错误使用仪器等,容易给航行带来潜在危险。随着船舶本身导航仪器以及通讯方式、通讯工具的不断复杂化,航运业对航海人员知识要求越来越高。而且,船员需要理解避碰规则等法规。很多海难事故的发生仅仅是因为船员对避碰规则的不理解造成的。驾驶员还必需具备一定的航行经验。 2.船舶因素 船舶因素包括船舶本身和船舶管理两方面。船舶质量、船舶适航是船舶安全航行的前提。当然,船舶自身因素还包括机舱各种消防和
船舶视频监控系统介绍
摘要:船舶视频监控系统对于船舶的防碰撞、防污染、防海盗以及管理监控等方面起到了非常重要的作用,对于运输危险品油轮的作用更为重要。本文在对现有船舶视频监控系统进行分析的基础上,对船舶视频监控系统在油轮上的应用提出了设想和建议。 关键词:油轮视频监控防碰撞防污染防海盗管理监控 0 引言 视频监控系统对于船舶防碰撞[1]、防污染、防海盗以及管理监控等方面起到了非常重要的作用,如将船舶配备的卫星通信设备与视频监控系统连接,还能做到岸端实时监控船舶的状况,这对于海事管理信息化也有着重大意义[2]。国外NGSCO等航运巨头近年来已经开始应用Kongsberg marine等厂商的视频监控设备。中国海运、中国远洋集团作为国内两大航运巨头,近两年已在推广船舶视频监控系统的应用,作为安全管理方面的重点之一。 1 视频监控系统在油轮船舶的实施方案 船舶视频监控系统一般由8个摄像头采集视频数据,经由主机处理后共享于船舶局域网监控,并将数据刻录在硬盘中保存,也通过卫星传送实现对船只的远程监控和管理。 1.1系统摄像头的布置方案 下表为系统摄像头位置以及主要作用,其中需注意的是新造船舶可以将1号摄像头布置于船头以获得更好的效果,航行船舶改造则考虑到电缆布置的问题只能将1号摄像头置于罗经甲板。 表1 船舶视频监控系统摄像头的布置方案 摄像头位置作用 1号摄像头罗经甲板主要拍摄船舶正前方,包括船头及大部分主甲板
2号摄像头、 3号摄像头驾驶室分别位于驾驶室左右两翼,主要拍摄驾控台以及海图室 4号摄像头 C甲板主要拍摄船尾 5号摄像头、 6号摄像头驾驶甲板分别位于驾驶甲板两翼,主要拍摄船左右两舷 7号摄像头机舱室主要拍摄船舶主机、辅机 8号摄像头集控室主要拍摄集控台 根据油轮船舶的特殊需求,甲板摄像头应为防爆型摄像头,符合国家标准GB3836.1-2010对于爆炸性气体环境用电气设备通用要求,以及国家标准GB3836.2-2010对于爆炸性气体环境用电气设备隔爆型要求。同时所用电缆应为阻燃型,满足国家标准GB50058爆炸和火灾危害环境店里装置设计规范要求。 1.2 系统主机性能介绍 系统主机主要进行数据处理,数据刻录以及连接船舶局域网的工作。主机需满足国家标准GB 20815-2006对于视频安防监控数字录像设备的要求,刻录机应满足国家标准GB50348-2004对于安全技术规范的要求,同时满足以下几点基本要求: (1)较大的硬盘容量。一般推荐为4TB,按照正常视频格式推算的录制时间计算公式:D(录制天数)=硬盘容量/通道数量/每小时所有通道的数据大小/每天的录制时间=30 天; (2)较强的数据压缩处理能力。支持PAL/NTSC 制式视频信号输入,采用H.264 视频压缩技术; (3)多种录像的回放与预览功能。需支持快放、慢放、单帧等回放模式,按录像类型、按时间进行检索; (4)对于外接设备较强的兼容性。因船舶设备需长时间开启,出现故障的可能性较普通设备高,所以主机应能支持U 盘、USB 硬盘、USB 刻录机、SATA 刻录机、SATA 硬盘备份。
影响船舶航行安全的因素通用范本
内部编号:AN-QP-HT906 版本/ 修改状态:01 / 00 When Carrying Out Various Production T asks, We Should Constantly Improve Product Quality, Ensure Safe Production, Conduct Economic Accounting At The Same Time, And Win More Business Opportunities By Reducing Product Cost, So As T o Realize The Overall Management Of Safe Production. 编辑:__________________ 审核:__________________ 单位:__________________ 影响船舶航行安全的因素通用范本
影响船舶航行安全的因素通用范本 使用指引:本安全管理文件可用于贯彻执行各项生产任务时,不断提高产品质量,保证安全生产,同时进行经济核算,通过降低产品成本来赢得更多商业机会,最终实现对安全生产工作全面管理。资料下载后可以进行自定义修改,可按照所需进行删减和使用。 船舶安全一直是航运界非常关注的问题,长期以来,世界各海运国家在船舶安全方面做了大量工作。然而,随着近年来航运业的快速发展,全球范围内的船舶碰撞、搁浅、火灾、爆炸、污染等事故屡屡发生,并造成了严重后果。综合分析这些事故,可以发现,影响船舶航行安全的因素主要有人为因素、船舶因素和环境因素三方面。 1.人为因素 人为因素主要是船员的误操作、责任心不强或人员素质不高等造成的事故。IMO在ISM 规则中指出,海上事故的发生约有80%是由于
海上视频监控
海上船舶远程视频监控系统 (2008-12-15 14:08:15) 1. 应用目标 运输船舶:实现运输船舶的本地视频监控管理、陆地视频监控管理和突发事件发生时的远程调度指挥,减少财产损失和保障生命安全,为水上交通安全提供有力的支持和保障。 海上救援:当发生海事事故或海上突发事件时,海上救助打捞船只及时救援抢险,实现陆地应急指挥中心对突发事件现场情况的及时掌控和调度指挥。 2. 整体设计 2.1. 整体网络拓扑 整体网络拓扑图 整个系统分为陆地调度指挥中心、船舶集团监控中心及船舶无线视频监控管理系统。陆地调度指挥中心、船舶集团监控中心设置中心管理平台及显示大屏幕系统,实现把船舶无
线视频监控在一个监控平台进行管理、控制。整体网络拓扑如图所示。 2.2. 需求分析 2.2.1. 船上的摄像机数量和安装位置 镜头1:安装在船头甲板上空对着甲板处,能看到船上甲板的实时情况。 镜头2:安装在船的左铉对着甲板左侧,能看到甲板左侧实时情况。 镜头3:安装在船的右铉镜头对着甲板右侧,看到甲板右侧实时情况。 镜头4:(可选待定)安装驾驶仓里面看到驾驶仓人员操作或驾驶仓后上面看到船的尾部。(可根船的结构改动镜头的位置和数量。) 2.2.2. 设备需求 1、要求摄像机设备是防暴、防水、防腐、带有红外功能。 2、设备要求有升级空间、兼容以后发展的网络。如3G、4G 等相关的网络。 3、能够兼容以前的监控设备。 2.2. 3. 功能实现需求 1、能保证白天和晚上视频能看到甲板的实时情况。 2、船上的所有的视频能保存30天。 3、保证本地录像清晰流畅,在有信号情况下远程查看图像清晰流畅。 4、可以将以前的船舶监控整合到同一个操作平台上。 2.3. 设计描述 根据以上需求,设计采用远程无线视频监控系统+船舶本地视频监控系统结合的方案,无线视频监控系统链路采用海事卫星和中国联通CDMA1x线路,保障无线通信稳定可靠。系统能够兼容下一代网络扩展,系统能够对原有系统进行利用改造。 其设计图如下:
航行
3、二副、三副(1)航迹推算一般应在船驶出引航水域并测得航位后立即开始推算。(2)陆标方位定位时,有远近不等的数个物标分布在船的周围,在选取物标时应尽量选取离船近些的物标,才能提高定位精度。(3)《世界大洋航路》1973 年版中的推荐航线适用于航速l5 节以下吃水12 米以下的船舶。(4)沿岸航线应设计在20 米等深线之外。(5)沿岸航线即使在最佳条件下,离开危险物的距离也应在 1 海里以上。(6)用叠标导航驶离港口时,如发现后标在前标的左边,你船应向右转舵。(7)测深辩位时应垂直于等深线测定。(8)在利用浮标导航时,应按本船计划航线航行。(9)拟定航线的依据是:①最新的航海图书资料;②水文气象条件;③本船的技术状态。(10)“航路指南”的作用是补充海图资料的不足。(11)“进港指南”是介绍船舶进港所需港口的详细状况。(12)船速15 节以下,沿岸航行定位时间要求每隔1/2 小时。(13)岛礁区航行转向时,为避开新航线正横附近的危险物,转向物标必须选在新航线前方附近。(14)某轮使用回声测深仪测得读数为 3 米,吃水为7 米,当 W7 高为1 米,则当时的海图水深为9 米。(15)某海区定线航迹向005°,当地磁差为13°E,自差为4° W,当时刮东北风,风压差取5°,应驶罗经航向O0l°。(16)在狭水道航行中,如需选用叠标时,一般应符合什么条件?①d/D≥1/3;②叠标标志越细长越好;③注意标志本身和背景的亮度,易于辨别。“注” 一前标和后标之间的距离。:d D 一船距前标的距离。 (17)定位后应在航海日志上填写观测的原始数据及有关改正量。(18)从事拖网作业的渔船应显示二个尖端对接的圆锥体。(19)机动船从事海上拖带时,在白天应悬挂当长度超过200 米时,应悬挂一个菱形体。(20)在海上,当你看到来船的号灯仅为红、红、白垂直三盏灯,则来船为失控船在航对水移动。(21)本船朝正东航行,在右前方 2 点处发现一红色舷灯,则该船的航向区间为292.5°——045°。(22)互见中在狭水道中追越船欲从被迫越船的右舷追越,在需要鸣放声号时,则应鸣放两长一短的声号。(23)雾中听到他船鸣放“·—· ”时,表示该船为锚泊船。(24)100>L≥12 米的船舶,应配备一个号钟,一个号笛。(25)