不平衡量计算方法
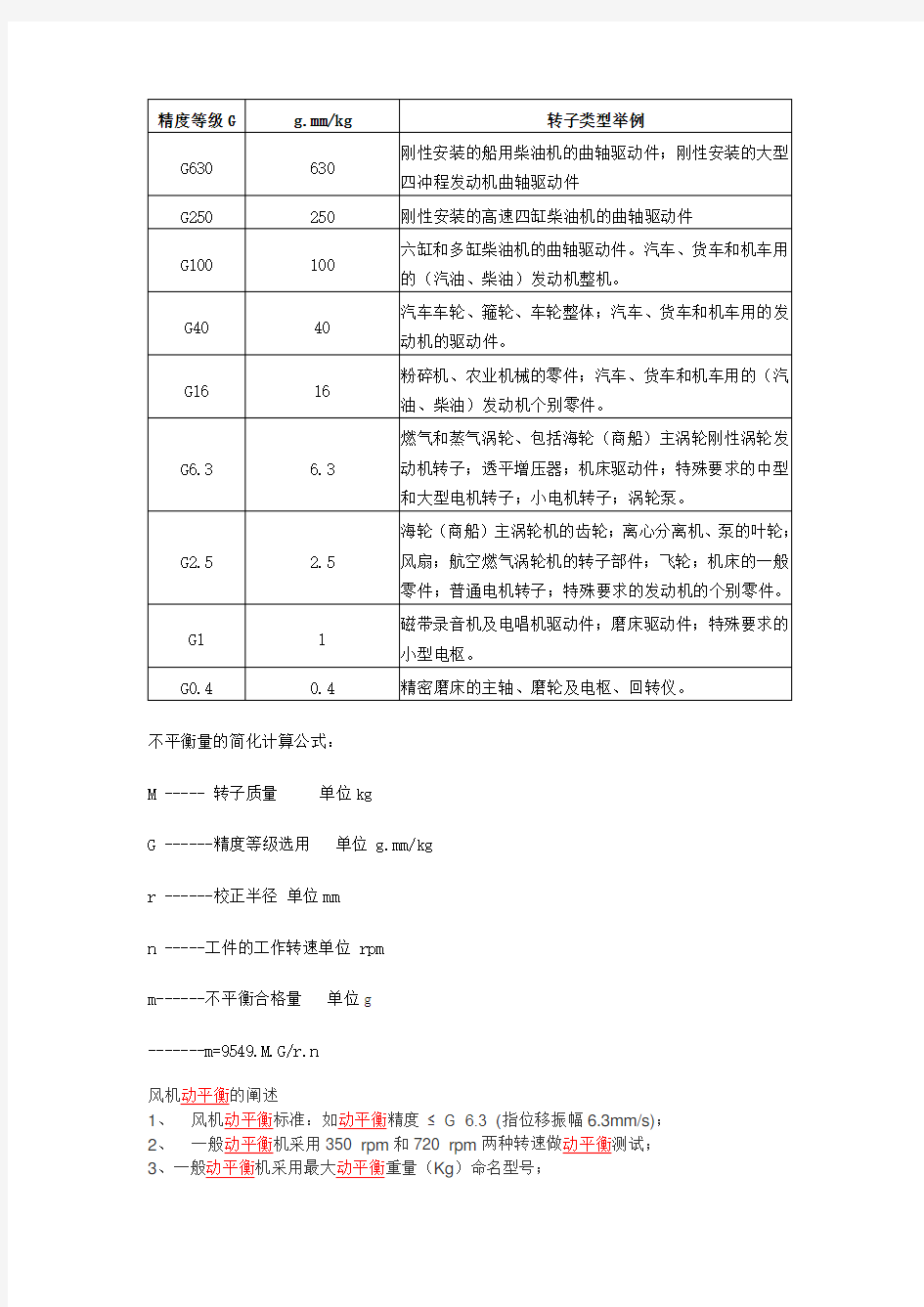

不平衡量的简化计算公式:
M ----- 转子质量单位kg
G ------精度等级选用单位 g.mm/kg
r ------校正半径单位mm
n -----工件的工作转速单位 rpm
m------不平衡合格量单位g
-------m=9549.M.G/r.n
1、风机动平衡标准:如动平衡精度≤ G 6.3 (指位移振幅6.3mm/s);
2、一般动平衡机采用350 rpm和720 rpm两种转速做动平衡测试;
3、一般动平衡机采用最大动平衡重量(Kg)命名型号;
4、动平衡方法:加重平衡和去重平衡;
平衡对象:轴,风轮,皮带轮和其它转子
6、平衡的原因:一个不平衡的转子将造成振动和转子本身及其支撑结构的应力(应力:材料内部互相拉推的力量,即作用与反作用力);
7、平衡的目的:
A,增加轴承寿命;
B,减少振动;
C,减少杂音;
D,减少操作应力;
E,减少操作者的困扰和负担;
F,减少动力损耗;
G,增加产品品质;
H,使顾客满意。
8、不平衡的影响
A,只有一个传动组件的不平衡会导致整个组合产生振动,在转动所引起的振动会造成轴承﹑轴套﹑轴心﹑卷轴﹑齿轮等的过大磨损,而减少其使用寿命;
B,一旦很高的振动出现,则在结构支架和外框产生应力,经常导致其整个故障;
C,且被支架结构吸收的能量会使得等效率的减低;
D,振动也会经由地板传给邻近的机械,会严重影响其精确度或正常功能。
9、不平衡的原因:
不平衡为转子(风轮﹑轴心或皮带轮等)的重量分布不均匀。
一、叶轮产生不平衡问题的主要原因
叶轮在使用中产生不平衡的原因可简要分为两种:叶轮的磨损与叶轮的结垢。造成这两种情况与引风机前接的除尘装置有关,干法除尘装置引起叶轮不平衡的原因以磨损为主,而湿法除尘装置影响叶轮不平衡的原因以结垢为主。现分述如下。
1.叶轮的磨损
干式除尘装置虽然可以除掉烟气中绝大部分大颗粒的粉尘,但少量大颗粒和许多微小的粉尘颗粒随同高温、高速的烟气一起通过引风机,使叶片遭受连续不断地冲刷。长此以往,在叶片出口处形成刀刃状磨损。由于这种磨损是不规则的,因此造成了叶轮的不平衡。此外,叶轮表面在高温下很容易氧化,生成厚厚的氧化皮。这些氧化皮与叶轮表面的结合力并不是均匀的,某些氧化皮受振动或离心力的作用会自动脱落,这也是造成叶轮不平衡的一个原因。2.叶轮的结垢
经湿法除尘装置(文丘里水膜除尘器)净化过的烟气湿度很大,未除净的粉尘颗粒虽然很小,但粘度很大。当它们通过引风机时,在气体涡流的作用下会被吸附在叶片非工作面上,特别在非工作面的进口处与出口处形成比较严重的粉尘结垢,并且逐渐增厚。当部分灰垢在离心力和振动的共同作用下脱落时,叶轮的平衡遭到破坏,整个引风机都会产生振动。
二、解决叶轮不平衡的对策
1.解决叶轮磨损的方法
对干式除尘引起的叶轮磨损,除提高除尘器的除尘效果之外,最有效的方法是提高叶轮的抗磨损能力。目前,这方面比较成熟的方法是热喷涂技术,即用特殊的手段将耐磨、耐高温的金属或陶瓷等材料变成高温、高速的粒子流,喷涂到叶轮的叶片表面,形成一层比叶轮本身材料耐磨、耐高温和抗氧化性能高得多的超强外衣。这样不仅可减轻磨损造成叶轮动平衡的
破坏,还可减轻氧化层产生造成的不平衡问题。
选用引风机时,干式除尘应优先选用经过热喷涂处理的叶轮。使用中未经过热喷涂处理的叶轮,在设备维修时,可考虑对叶轮进行热喷涂处理。虽然这样会增加叶轮的制造或维修费用,但却提高叶轮的使用寿命l~2倍,延长了引风机的大修周期。从而降低了引风机和整个生产系统的运行成本,综合效益很好。
2.解决叶轮结垢的方法
(1)喷水除垢:这是一种常用的除垢方法,喷水系统装在引风机的机壳上,由管道、3个喷嘴(1个位于叶轮出口处,2个位于进口处)及排水孔组成。水源一般为自来水,压力约0.3MP a。这种方法通常还是有效的。缺点是每次停机除垢的时间较长,每月需停机数次进行除垢。影响机组的正常使用。
(2)高压气体除垢:该系统采用与喷水系统相似的结构,但其管道为耐高压管道、专用的喷嘴和高压气源。这种装置对叶片的除垢是快速有效的,它可以在引风机正常停机的间隙,开启高压气源,仅用数十秒的时间即可完成除垢。由于操作简单方便,一天可以进行许多次,不但解决了人工除垢费力、费时的问题,还明显降低了整个机组的生产成本。问题是用户是否有现成的高压气源(压力在0.8~1.5MPa之间,可以用压缩空气或氮气),否则,需要专用的高压压缩机设备。
(3)气流连续吹扫除垢:从结构上讲,连续吹扫装置不需要外部气源,它利用引风机本身的排气压力,将少量的烟气(额定风量的1%~2%)从引风机的内部引向专用喷嘴,喷嘴位于叶轮的进口,以很高的速度将烟气咳射到叶片的非工作表面,这种吹扫是连续地,它随着引风机的开启而开始,不但将刚刚粘到叶片上的粉尘吹掉,还可防止粉尘沉积加厚,且无需停机除垢。该装置结构简单、对引风机改动量很小,防结垢效果很好,是一种很有发展的新技术。3.叶轮动平街的校正
无论是采用热喷涂处理的叶轮,还是采用各种方法除垢的叶轮,其效果都不会一劳永逸。引风机在长期使用后,仍会出现振动超过允许上限值阶情况。此时,叶轮的不平衡问题只能通过动平衡校正来解决。
以往叶轮的动平衡校正通常是在动平衡机上进行的,这对使用中的引风机,特别是大型风机是很不方便的。因此,现场动平衡技术近年来越来越得到人们的重视。它与以往的方法相比主要的优点为(1)避免繁琐的拆装工作,节省了拆装和运输费用,缩短了维修时间;(2)保存了原有的安装精度,提高了整个引风机系统的平衡精度测试设备:现场动平衡仪型号:HG —3538
测试步骤:(1)在风机轴上贴反光条,测得初始振动值:通频振幅Vrmso,工频振幅Vo,相角φo;(2)测得加试重后振动值:通频振幅Vrmsl,工频振幅V1,相角φ1,自动求得动平衡解算结果(配重值和加配重的角度);(3)加配重后,测剩余振动值:通频振幅Vrms2,工频振幅V2,相角φ2,只要能满足振动验收标准即可。
测试时间:对熟练的现场测试人员,完成上述工作只需l~2小时。
现场动平衡技术是一种成熟、实用的维修技术,它可以简便、快捷和经济地解决不平衡问题。。其测试方法简述如下。
挠性转子动平衡:
轴向长度上、工作转速高的转子,转动时在不平衡质量作用下会沿轴向产生弯矩,发生弹性变形,不能采用不计轴线弯曲变形的刚性转子动平衡方法。理论上如果能找到原始不平衡量的数值和相位,即可以在其对称位置加上一个相等的平衡质量,消除轴承的动反力及沿轴向的弯矩。实际上转子沿轴向的不平衡质量的分布难以确定,一般只能轴向长度上、工作转速高的转子,转动时在不平衡质量作用下会沿轴向产生弯矩,发生弹性变形,不能采用不计轴
线弯曲变形的刚性转子动平衡方法。理论上如果能找到原始不平衡量的数值和相位,即可以在其对称位置加上一个相等的平衡质量,消除轴承的动反力及沿轴向的弯矩。实际上转子沿轴向的不平衡质量的分布难以确定,一般只能采用挠性转子高速动平衡工艺,使转子在一定转速下的轴承反力和弯矩值为最小。挠性转子动平衡原理,将挠性转子简化为一根简支梁,梁在其弹性稳定平衡位置附近会发生多种形式的微小振动,其中横向振动是挠性转子动平衡的理论基础,整个转子的振动位移,即动挠度曲线上一条绕如图58-7所示的转轴Oz,以角速度w回转的空间曲线,可以视该曲线为无限多条固有频率不同的振型曲线在空间叠加而成。各阶振型曲线所在平面互不重合,图58-7所示为三个振型的空间曲线。当转速变化时,各阶振型曲线的幅值及所占的比例均随转速变化,从而动挠度曲线也随转速变化。当转速接近某阶临界转速时,动挠度曲线形成相应的某阶振型曲线。不平衡质量的某阶振分量只能激发与之相应的那一阶挠度振型分量,不能激发其他阶的振型分量,称为振型函数的正交性。挠性转子的动平衡同样包括平衡检测和平衡校正两个内容。平衡检测是将转子驱动至一定的转速,通过对轴承振动或转子动挠度的测量,以求知引起轴承动反力或转子动挠度的原始不平衡质量的大小和分布规律。实用中转子动挠度不易测量,多为测量轴承振动。轴承振动往往是转子加上测量系统各部件及周围环境各种机械振动的综合反应,因此,在平衡检测时,要求能正确检测出由转子不平衡引起的那部分振动,检测仪器应具有选频滤波能力和足够的精度,并使平衡转速保持稳定和具有复现能力。转子原始不平衡量沿轴方向的分布为一条空间曲线,难以直接测量,因此通常在转子上加一个或几个试加质量,然后分别测量转子在试加质量前后因不平衡量的变化而引起的轴承振动的变化,再计算出原始不平衡量的大小和分布规律。转子的校正总是用两个或两个以上的集中质量,而不是用分布式的校正质量。确定平衡校正面的数目及其轴向位置是挠性转子动平衡的关键。
振型平衡法利用共振原理进行挠性转子的动平衡。将转子驱动到某一阶临界转速附近,使转子的挠曲接近于该阶振型,这样把转子相应横断面上的不平衡量的大小和方向充分地分离出来,分别加以消除。常用的振型平衡法有N+2法和N法。使用N+2法,挠性转子在进行高速动平衡前,要预先进行刚性转子低速平衡,以转子振型平衡法利用共振原理进行挠性转子的动平衡。将转子驱动到某一阶临界转速附近,使转子的挠曲接近于该阶振型,这样把转子相应横断面上的不平衡量的大小和方向充分地分离出来,分别加以消除。常用的振型平衡法有N+2法和N法。使用N+2法,挠性转子在进行高速动平衡前,要预先进行刚性转子低速平衡,以转子的两侧面作为低速动平衡的校正面。然后进行逐阶振型动平衡。若转子在其工作范围内所含有的临界转速的阶数为N,刚动平衡中共需要N+2个平衡校正面。使用N法时转子不作低速刚性动平衡,直接进行高速动平衡,因此只需要N个平衡校正面。N
法减少了低速动平衡平序,但会增加转子在高速动平衡机上平衡所需的时间和转子起动次数。N+2法的动平衡步骤为:1)转子先作低速动平衡,减小原始不平衡量引起的离心惯性力和力矩。2)准确计算转子各阶临界转速和振型,一般为前三阶,确定振型峰值位置。实际转子的质量分布往往不对称,转子的振型曲线并非图58-7所示的节点等距离分布。只有准确确定转子的临界转速和振型,才能正确选择平衡转速和平衡校正面位置。3)进行挠性转子一阶振型的高速动平衡,见图58-8。取平衡转速为第一临界转速的0.9或1.1倍及三个平衡校正面。在中间的平衡校正面中加上平衡质量-m12,两边的平衡校正面中分别加上m11、m13,满足m12=+ m11= m13和m11×a =m13×b使平衡质量的合力和合力矩均零。
4)进行挠性转子二阶振型的高速动平衡。取平衡转速为第二临界转速的0.9或1.1倍及四个平衡正面。在四个平衡校正面中依次分别加上平衡质量m21、-m22、-m23、-m24,同样使平衡质量的合力和合力矩均为零。5)同理,进行三阶振型的高速动平衡,平衡校正面数目为振型的阶数加2,所有平衡质量加在同一个平面中,相邻平衡校正面中的平衡质量
加在轴线的异侧。四阶及更高阶的振型可以用同样的原理进行高速动平衡。由于曲线节点较多,转子的动挠度不会太大,危险性较小。使用振型平衡法作高速动平衡时,平衡校正面应选取在下一阶振型曲线的节点附近;需要通过试加质量和多次起动转子,测量轴承振动的振动的振幅及相位,然后进行作图、运算才能求解。振动平衡法的缺点是平衡基准面较多,事先要掌握转子的临界转素和振型曲线。(3)影响系数法,预先在转子上选取一定的平衡校正面和振动测量点,在各平衡校正面上分别加一个平衡质量,并用实验方法测量出加贫农个横质量前后的振动量,然后根据振动量值求出每个平衡校正面在一定转速下对各点个测量但振动的影响系数,建立并求解联立方程组。
使用影响系数法平衡挠性转子的一般过程为:1)选定平衡校正面。测量点及平衡转速。一般平衡校正面的个数和所处的轴向位置应根据转子的具体结构和考虑柱子实际振型来确定,测量点选在轴承或靠近轴承的轴颈处,平衡转素在转子临界转速附近,并油低至高,直到工作转速。2)在选定的测量点处设置传感器3)测量并记录转子在原始状态下的振动量。4)在选定的平衡校正面上逐个安置平衡质量,并逐次记录所有测量点在不同瓜皮帽后况下转子不平衡振动的振幅和相位角。5)计算影响系数,即单位平衡质量在转子各测量点处所引起的不平衡振动。计算方法为每一个平衡校正面,将加上试加质量后的振动值按矢量运算法则减去原始状态下的振动值,并除以试加质量。6)进行矩阵转换,最后计算出转子在各个平衡校正面内的原始不平衡量的大小和相位角,选择一组平衡质量分别加在各平衡校正面的相应位置上。7)完成平衡校正工艺后,再次起动转子,测量,记录转子的不平衡振动。通常不能依次就达到转子平衡的技术要求。一般在第二次及以后的平衡校正中不再计算影响系数,而是将转子平衡后的残余不平衡振动值视作新的原始状态下的振动值,再次选择一组平衡质量进行平衡校正,直至满足转子动平衡的技术要求。使用影响系数法时,平衡转素的控制对振动测量影响极大,试加平衡质量前后的转速必须在选定的数值上保持稳定。
该引风机不平衡振动最明显的特征,一是径向振动大,二是谐波能量集中于基频(12.33Hz),而该引风机的径向振动均在30μm以下;在图2所示的径向频谱中,基频振动最大只有3.35mm/s。因此,引风机的振动并非由不平衡引
起。
5.不对中故障
由不对中引起的振动,主要有三个特点,一是表现在轴向振动较大,二是靠近联轴器的轴承振动增大,三是不对中故障的特征频率为2倍频,常伴有3倍频。
不平衡量计算方法
不平衡量的简化计算公式: M ----- 转子质量单位kg G ------精度等级选用单位 g.mm/kg r ------校正半径单位mm n -----工件的工作转速单位 rpm m------不平衡合格量单位g -------m=9549.M.G/r.n 1、风机动平衡标准:如动平衡精度≤ G 6.3 (指位移振幅6.3mm/s); 2、一般动平衡机采用350 rpm和720 rpm两种转速做动平衡测试; 3、一般动平衡机采用最大动平衡重量(Kg)命名型号;
4、动平衡方法:加重平衡和去重平衡; 平衡对象:轴,风轮,皮带轮和其它转子 6、平衡的原因:一个不平衡的转子将造成振动和转子本身及其支撑结构的应力(应力:材料内部互相拉推的力量,即作用与反作用力); 7、平衡的目的: A,增加轴承寿命; B,减少振动; C,减少杂音; D,减少操作应力; E,减少操作者的困扰和负担; F,减少动力损耗; G,增加产品品质; H,使顾客满意。 8、不平衡的影响 A,只有一个传动组件的不平衡会导致整个组合产生振动,在转动所引起的振动会造成轴承﹑轴套﹑轴心﹑卷轴﹑齿轮等的过大磨损,而减少其使用寿命; B,一旦很高的振动出现,则在结构支架和外框产生应力,经常导致其整个故障; C,且被支架结构吸收的能量会使得等效率的减低; D,振动也会经由地板传给邻近的机械,会严重影响其精确度或正常功能。 9、不平衡的原因: 不平衡为转子(风轮﹑轴心或皮带轮等)的重量分布不均匀。 一、叶轮产生不平衡问题的主要原因 叶轮在使用中产生不平衡的原因可简要分为两种:叶轮的磨损与叶轮的结垢。造成这两种情况与引风机前接的除尘装置有关,干法除尘装置引起叶轮不平衡的原因以磨损为主,而湿法除尘装置影响叶轮不平衡的原因以结垢为主。现分述如下。 1.叶轮的磨损 干式除尘装置虽然可以除掉烟气中绝大部分大颗粒的粉尘,但少量大颗粒和许多微小的粉尘颗粒随同高温、高速的烟气一起通过引风机,使叶片遭受连续不断地冲刷。长此以往,在叶片出口处形成刀刃状磨损。由于这种磨损是不规则的,因此造成了叶轮的不平衡。此外,叶轮表面在高温下很容易氧化,生成厚厚的氧化皮。这些氧化皮与叶轮表面的结合力并不是均匀的,某些氧化皮受振动或离心力的作用会自动脱落,这也是造成叶轮不平衡的一个原因。2.叶轮的结垢 经湿法除尘装置(文丘里水膜除尘器)净化过的烟气湿度很大,未除净的粉尘颗粒虽然很小,但粘度很大。当它们通过引风机时,在气体涡流的作用下会被吸附在叶片非工作面上,特别在非工作面的进口处与出口处形成比较严重的粉尘结垢,并且逐渐增厚。当部分灰垢在离心力和振动的共同作用下脱落时,叶轮的平衡遭到破坏,整个引风机都会产生振动。 二、解决叶轮不平衡的对策 1.解决叶轮磨损的方法 对干式除尘引起的叶轮磨损,除提高除尘器的除尘效果之外,最有效的方法是提高叶轮的抗磨损能力。目前,这方面比较成熟的方法是热喷涂技术,即用特殊的手段将耐磨、耐高温的金属或陶瓷等材料变成高温、高速的粒子流,喷涂到叶轮的叶片表面,形成一层比叶轮本身材料耐磨、耐高温和抗氧化性能高得多的超强外衣。这样不仅可减轻磨损造成叶轮动平衡的
三相不平衡损耗计算
农村低压电网改造后低压电网结构发生了很大的变化,电网结构薄弱环节基本上已经解决,低压电网的供电能力大大增强,电压质量明显提高,大部分配电台区的低压线损率降到了11%以下,但仍有个别配电台区因三相不平衡负载等原因而造成线损率居高不下,给供电管理企业特别是基层供电所电工组造成较大的困难和损失,下面针对这些情况进行分析和探讨。 一、原因分析 在前几年的农网改造时,对配电台区采取了诸如增添配电变压器数量,新增和改造配电屏,配电变压器放置在负荷中心,缩短供电半径,加大导线直径,建设和改造低压线路,新架下户线等一系列降损技术措施,也收到了很好的效果。但是个别台区线损率仍然很高,针对其原因,我们做了认真的实地调查和分析,发现一些台区供电采取单相二线制、二相三线制,即使采用三相四线制供电,由于每相电流相差很大,使三相负荷电流不平衡。从理论和实践上分析,也会引起线路损耗增大。 二、理论分析 低压电网配电变压器面广量多,如果在运行中三相负荷不平衡,会在线路、配电变压器上增加损耗。因此,在运行中要经常测量配电变压器出口侧和部分主干线路的三相负荷电流,做好三相负荷电流的平衡工作,是降低电能损耗的主要途经。 假设某条低压线路的三相不平衡电流为IU、IV、IW,中性线电流为IN,若中性线电阻为相线电阻的2倍,相线电阻为R,则这条线路的有功损耗为ΔP1=(I2UR+I2VR+I2WR+2I2NR)×10-3 (1) 当三相负荷电流平衡时,每相电流为(IU+IV+IW)/3,中性线电流为零,这时线路的有功损耗为 ΔP2=■2R×10-3 (2)
三相不平衡负荷电流增加的损耗电量为 ΔP=ΔP1-ΔP2=■(I2U+I2V+I2W-I2UI2V-I2VI2W+I2WI2U+3I2N)R×10-3 (3)同样,三相负荷电流不平衡时变压器本身也增加损耗,可用平衡前后的负荷电流进行计算。由此可见三相不平衡负荷电流愈大,损耗增加愈大。 三相负荷电流不平衡率按下式计算 K=■×100 (4)■代表平均电流 一般要求配电变压器出口三相负荷电流的不平衡率不大于10%,低压干线及主要支线始端的三相电流不平衡率不大于20%。可见若不平衡,线损可能增加数倍。据了解,目前农村单相负荷已成为电力负荷的主要方面,农村低压线路虽多为三相四线,但很多没有注意到把单相负荷均衡的分配到三相电路上,并且还有一定数量的单相两线、三相三线制供电。按一般情况平均测算估计,单相负荷的线损可能增加2~4倍,由此可知,调整三相负荷平衡用电是降损的主要环节。 三、现场调查分析、试验情况 实践是检验真理的标准,理论需要在实践中验证。2004年我们在庄寨供电所检查分析个别台区线损率高的原因,发现庄寨供电所杨小湖配电台区损耗严重,我们重点进行了解剖分析: 该台区配电变压器容量为100kV·A,供电半径最长550m,由上表得该配变台区267户用电量12591kW·h,没有大的动力用户,只有1户轧面条机,户均月用电46.98kW·h,低压线损一直17%左右,用钳流表测量变压器出口侧24h电流平均值为: IU=9A,IV=15A,IW=35A,IN=21A。三相负荷电流不平衡率计算为: K=■×100%=■×100%=35.59%
转子允许动不平衡量的计算
转子允许动不平衡量的计算 允许不平衡量的计算公式 U per=M X G X n r x x 260 Π X 103 (g ) 转子重量M,Kg 0.2 0.3 0.2 0.2 平衡精度G ,gmm/kg 6.3 2.5 6.3 6.3 转子的校正半径r ,mm 20 20 20 20 转子的转速n ,rpm 1000 1000 1000 1000 允许不平衡量,g 0.602 0.358 0.602 0.602 每面的允许不平衡量,g 0.301 0.179 0.301 0.301 U per 为允许不平衡量 M 代表转子的自身重量,单位是kg ; G 代表转子的平衡精度等级,单位是mm/s ; r 代表转子的校正半径,单位是mm ; n 代表转子的转速,单位是rpm 。 一、动平衡机常用术语 1.不平衡量U :转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。 它等于不平衡质量m 和转子半径r 的乘积。其单位是gmm 或者gcm ,俗称“矢径积”。 2.不平衡相位:转子某平面上的不平衡质量相对于给定极坐标的角度值。 3.不平衡度e :转子单位质量的不平衡量,单位是gmm/kg 。 在静不平衡时相当于转子的质量偏心距,单位为μm 。 4.初始不平衡量:平衡前转子上存在的不平衡量。 5.许用不平衡量:为保证旋转机械正常工作所允许的转子剩余不平衡量。 该指标用不平衡度表示时,称为许用不平衡度(亦称许用不平衡率)。 6.剩余不平衡量:平衡校正后转子上的剩余不平衡量。 7.校正半径:校正平面上校正质量的质心到转子轴线的距离,一般用mm 表示。 8.校正平面的干扰(相互影响):在给定转子某一校正面上不平衡量的变化引起另一校正平面上的改变(有时称为平面分离影响) 9.转子平衡品质:衡量转子平衡优劣程度的指标。
动平衡相关知识3-转子剩余不平衡量的计算方法
转子允许的剩余不平衡量的计算 东莞市元创机械是动平衡专家,为您解决电机转子动平衡难题,提供电机转子动平衡机,全自动平衡机,在这篇文章中主要向大家介绍转子允许的剩余不平衡量的计算方法,首先我们就需要先了解动平衡机的常用术语。 一、动平衡机常用术语 1.不平衡量U:转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。 它等于不平衡质量m和转子半径r的乘积。其单位是gmm或者gcm,俗称“重径积”。 2. 不平衡相位:转子某平面上的不平衡质量相对于给定极坐标的角度值。 3. 不平衡度e:转子单位质量的不平衡量,单位是gmm/kg。 在静不平衡时相当于转子的质量偏心距,单位为μm。 4. 初始不平衡量:平衡前转子上存在的不平衡量。 5. 许用不平衡量:为保证旋转机械正常工作所允许的转子剩余不平衡量。 该指标用不平衡度表示时,称为许用不平衡度(亦称许用不平衡率)。 6. 剩余不平衡量:平衡校正后转子上的剩余不平衡量。 7. 校正半径:校正平面上校正质量的质心到转子轴线的距离,一般用mm表示。 8. 校正平面的干扰(相互影响):在给定转子某一校正面上不平衡量的变化引起另一校正平面上的 改变(有时称为平面分离影响) 9. 转子平衡品质:衡量转子平衡优劣程度的指标。 计算公式:G=e perω/1000 式中G-转子平衡品质,单位mm/s。从G0.4-G4000分11级。 e per-转子允许的不平衡率gmm/kg或转子质量偏心距μm。 ω-相应于转子最高工作转速的角速度=2πn/60≈n/10,n为转子的工作转速r/min。 10. 转子单位质量的允许不平衡度(率): e per=(G×1000)/(n/10) 单位:gmm/kg或μm 11. 最小可达剩余不平衡量(U mar):指平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡 机最高平衡能力的性能指标。单位为gmm。 12. 不平衡量减少率(URR):经过一次平衡修正减少的不平衡量与初始不平衡量之比值。 它是衡量平衡机效率的性能指标,以百分数表示: URR(%)=(U1-U2)/U1=(1-U2/U1)×100 式中:U1-初始不平衡量 U2-一次平衡修正后的剩余不平衡量 13. 校验转子:为校验平衡机性能而设计的刚性转子。 其质量、大小、尺寸均有规定,分立式和卧式两种。 立式转子质量为1.1,3.5,11,35,110 kg。 卧式转子质量为0.5,1.6,5,16,50,160,500kg。
离心力和转速之间的简单换算
离心力和离心转速的换算是经常用到的,具体的计算公式如下: RCF = 1.118 ×10-5×N2×R RCF表示相对离心力,单位为g N表示转速,单位为rpm转/分 R表示离心半径,单位为cm。 离心就是利用离心机转子高速旋转产生的强大的离心力,加快液体中颗粒的沉降速度,把样品中不同沉降系数和浮力密度的物质分离开。离心力(F)的大小取决于离心转头的角速度(ˉ,r/min)和物质颗粒距离心轴的距离(r,cm)。它们的关系是:F=ˉ2R 为方便起见,F常用相对离心力也就是地心引力的倍数表示。即把F值除以重力加速度g(约等于9.8m/s2)得到离心力是重力的多少倍,称作多少个g。例如离心机转头平均半径是6cm,当转速是60000r/min时,离心力是240000×g,表示此时作用在被离心物质上的离心力是日常地心引力的24万倍。 因此,转速r/min和离心力g值之间并不是成正比关系,还和半径有关。同样的转速,半径大一倍,离心力(g值)也大一倍。转速(r/min)和离心力(g值)之间的关系可用下式换算: 其换算公式如下:Mt\lS_x~RV G=1.11*10(-5)*R*(rpm)2 G为离心力,一般以g(重力加速度)的倍数来表示。 10(-5)即:10的负五次方。 (rpm)2即:转速的平方。 R为半径,单位为厘米。 例如,离心半径为10厘米,转速为8000, 其离心力为: G=1.11*10(-5)*10*(8000)2=7104 即离心力为7104g.而当离心力为8000g时,其转速应为:8489即约为8500rpm. 值得注意的是,这里跟半径是相关的。也就是说,不同的离心机其换算关系是不一样的。 普通离心机可以用计算器算一下,很准。而低温离心机则不须如此费事。上面有按钮可以在rpm与g之间切换,非常方便。 以前的文章,尤其是国内的文章通常以rpm来表示。现在多倾向于以g来表示。 转速有离心力(×g)和每分钟转速(rpm)两种表示方式,有些离心机没有自动切换功能。下面的公式可以帮助解决这个问题: g=r×11.18×10-6×rpm2(式中r为有效离心半径,即从离心机轴心到离心管桶底的长度) 如:转速为3000rpm,有效离心半径为10cm,则离心力为=10×11.18×10-6×30002=1006.2(×g)。
不平衡报价的结算公式
不平衡报价的结算公式 最终结算价: ①工程量减少超过10%的,按中标单价×实际量+(重新组价*(1-中标下浮率)-中标单价)×(实际量*中标量);②工程量增加超过10%的,按中标单价×招标工程量*+(重新组价*(1-中标下浮率))×(实际量*中标量)。当然如果标底价较合理重新组价可以用标底单价*(1-中标下浮率),采用这种方式合情合理,结算实际意义大于理论意义 即 ①工程量减少超过10%的,按中标单价×实际量+(标底单价*(1-中标下浮率)-中标单价)×(实际量*中标量);②工程量增加超过10%的,按中标单价×招标工程量*+(标底单价*(1-中标下浮率))×(实际量*中标量)。 如已按投标单价计算,再进行价格调增调减的公式: ①工程量减少超过10%的,按(重新组价*(1-中标下浮率)-中标单价)×(实际量*中标量);②工程量增加超过10%的,按(重新组价*(1-中标下浮率)-中标单价)×(实际量*中标量)。当然如果标底价较合理重新组价可以用标底单价*(1-中标下浮率),采用这种方式合情合理,结算实际意义大于理论意义 即: ①工程量减少超过10%的,按(标底单价*(1-中标下浮率)-中标单价)×(实际量*中标量);②工程量增加超过10%的,按(标底单价*(1-中标下浮率)-中标单价)×(实际量*中标量)。 上述公式是既减亦加的公式。 如只减不增,则按上述公式计算的结果为正时则不计。 工程变化幅度超过±10%且投标单价与下浮后的标底单价相比变化幅度在±15%以上时,实际工程量按投标价结算后,须对多出的工程量或少做的工程量以按以公式进行调整: ①工程量减少超过10%的,按(标底单价*(1-中标下浮率)-中标单价)×(实际量*中标量);②工程量增加超过10%的,按(标底单价*(1-中标下浮率)-中标单价)×(实际量*中标量)。 实际工程量增减超过10%以上的部分,且其投标单价与下浮后的标底价相比浮动超过15%的,其单价按下列原则调整:当结算工程量超过招标工程量+10%时,超出的工程量按标底下浮后的单价结算(标底下浮后的单价如高于投标单价仍按投标单价),当结算工程量超过招标工程量-10%时,按(标底下浮后的单价-中标单价)×(实际量*中标量)调减(标底下浮后的单价如低于投标单价仍按投标单价),除此之外均按中标单价结算不调整。
应力计算
①叶片离心拉应力计算 1)对于涡轮增压器来说,等截面叶片根部截面上的拉应力公式为 20m 1=2u a σρσθ+ 2/N m 其中 ρ为叶片的材料密度(3 /kg m ); m u 为叶片中经处的圆周速度(m/s ); /m D l θ=为直径叶高比; m D 为叶片平均直径(m ); l 为叶片高度(m ); a σ为叶片附加应力,其表示式为: 2222p p t e a m m h m h D A D A u z D A D A πρσ????????=+ ? ????????? ,2/N m 其中 z 为叶轮叶片个数; t D 为叶冠中经(m ); p D 为叶片凸台或拉筋的中经(m ); h D 为叶根直径(m ); e A δ=?为叶冠截面面积(2m ); p A 为凸台或拉筋的截面积(2 m ); h A 为叶根截面面积(2m ); 如果叶片没有设置阻尼拉筋或凸台,则p A =0;如果叶片不带冠,则e A =0;当两者均不存在时,a σ=0. 2)叶片截面面积沿叶高按线性变化时的拉应力计算式: 212113m a u λλσρσθθ+-??=++ ??? 2/N m 式中,/t h A A λ=是叶顶叶根截面比。通常,对压气机叶片,λ=0.3~0.65 3)叶片截面面积沿叶高按某一任意规律变化时,任意一个截面上离心应力可
用数值积分法计算。对于第i 个几面,离心力i σ可按下式计算: 21i i ic i i V r A σρω?=∑ 2/N m 其中 ()112 i i i i im i V A A x A x -?=+?=?为叶片第i 个微段的体积(3m ); i A 和1i A -为叶片第i 个微段的内径与外径上的截面积(3m ); ic h i ic r r x x =++?为第i 个微段重心c 的半径(m ); ()1216i i ic i im A A x x A -+?=?为第i 个微段重心c 离第i 截面的间距(m ); ω为旋转角速度(rad/s ); ρ为材料密度(3/kg m ); ②叶片弯应力计算 1)由气体作用引起的弯矩 作用于叶片任意截面上的气体周向弯矩gu M 可以按下式计算: ()2gu i M B l x =- N m ? 而 ()122um um G B c c zl =+ N/m 式中 i x 为计算截面至叶根的距离(m ); z 为叶片个数; l 为叶片的高度(m ); 1um c ,2um c 为叶片中经处、出口气流周向分速(m/s ); G 为气体流量(kg/s )。 作用于叶片而难以截面上的气体周向弯矩ga M 的计算公式也表达为: ()2ga i M D l x =- N m ? 而 ()()12122m a a r G D c c p p zl z π=-+- N/m 式中 1a c ,2a c 为叶片进、出口中经截面上的周向分速(m/s ); 1p ,2p 为叶片进、出口中经截面上的气体压力(2 /N m );
转子不平衡量的计算方法
转子不平衡量的计算方法 1、计算转子的允许不平衡度 Eper=(G×1000)/(n/10) Eqer---允用不平衡度单位μ G ---平衡精度等级一般取6.3 n----工作转速单位r/min 例某工件工作转速 1400r/min平衡精度等级取 6.3则Eper=(6.3×1000)/(1400/10)=6300/140=45μ 2、计算允许残余不平衡量 m=(Eper×M)/(r×2) m------允许残余不平衡量单位g M------工件旋转质量单位kg r------工件半径单位mm 例工件质量20kg 半径60mm 双面平衡故计算每个平衡面的允许的剩 余不平衡量为m=(Eper×M)/(r×2)=45×20/60×2=7.5g 不平衡机专用名 1、不平衡量――转子某平面上不平衡和量值大小,不涉及不平衡的角位置。它等于不平衡质量和其质心至转子轴线距离的乘积,不平衡量单位为g.mm或g.cm俗称“重径积” 2、不平衡度――转子某平面上的不平衡质相对于给定极坐标的角度值 3、不平衡度―――转子单位质量的不平衡量,单位为g.mm/kg,在静不平衡时相当于转子的质量偏心距,单位为微米。 4、初始不平衡量―――平衡前转子上存在的不平衡量。 5、许用不平衡量―――为保证旋转机械正常工作所允许的转子剩余不平衡量该指标用不平衡度表示时,称为许用不平衡度(亦有称许用不平衡率)
6、剩余不平衡量―――平衡后转子上剩余的不平衡度。 7、校正半径――――校正平面上校正质量的质心到转子轴线的距离,一般用mm表示。 8、校正平面干扰(相互影响)―――在给定转子某一校正面上不平衡量的变化所引起另一校正平面上平衡机指标值的改变(有时称平面分离影响)。 9、转子平衡品质―――衡量转子平衡优劣程度的指标。 G =Eperω/1000 试中G为转子平衡品质,mm/s, 从G0 4-G4000分11级,Eper为转子允许的不平衡率g.mm/kg或转子质量偏心距μmω相应于转子最高工作转速的角速度=2Ⅱn/60≈n/10 10、转子单位质量的允许残余不平衡度(率) Eper=(G×1000)/(n/10) 单位g.mm/kg或mm/s 11、最小可达剩余不平衡量 (umar)---单位g.m,平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标,当该指标用不平衡度表示时,称为最小可达剩余不平衡度(单位g.mm/kg). 12、不平衡量减少率 (URR)---经过一次平衡校正所减少的不平衡量与初始不平衡量之比值,它是衡量平衡机效率的性能指标以百分数表示:URR(%)=(U1-U2)/U1=91-U2/U1)×100 式中:U1为初始不平衡量; U2为一次平衡校正后的剩余不平衡量 13、不平衡国偶干扰比 ---单面平衡机抑制不平衡力偶影响的性能指标。 14、校验转子―――为校验平衡机性能而设计的刚性转子,其质量、大小、尺寸均为有规定,分立式与卧式二种,立式转子质量为1.1、3.5、11、35、110kg, 卧式转子质量为0.5、1.6、5、16、50、160、500kg
转子允许不平衡量的计算
转子允许不平衡量的计算 允许不平衡量的计算公式 U per=M X G X n r x x 260 X 10 3 (g ) U per 为允许不平衡量 M 代表转子的自身重量,单位是kg ; G 代表转子的平衡精度等级,单位是mm/s ; r 代表转子的校正半径,单位是mm ; n 代表转子的转速,单位是rpm 。 一、动平衡机常用术语 1.不平衡量U :转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。 它等于不平衡质量m 和转子半径r 的乘积。其单位是gmm 或者gcm ,俗称“矢径积”。 2.不平衡相位:转子某平面上的不平衡质量相对于给定极坐标的角度值。 3.不平衡度e :转子单位质量的不平衡量,单位是gmm/kg 。 在静不平衡时相当于转子的质量偏心距,单位为μm 。 4.初始不平衡量:平衡前转子上存在的不平衡量。 5.许用不平衡量:为保证旋转机械正常工作所允许的转子剩余不平衡量。 该指标用不平衡度表示时,称为许用不平衡度(亦称许用不平衡率)。 6.剩余不平衡量:平衡校正后转子上的剩余不平衡量。
7.校正半径:校正平面上校正质量的质心到转子轴线的距离,一般用mm表示。 8.校正平面的干扰(相互影响):在给定转子某一校正面上不平衡量的变化引起另一校正平面上的改变(有时称为平面分离影响) 9.转子平衡品质:衡量转子平衡优劣程度的指标。 计算公式:G=e perω/1000 式中G-转子平衡品质,单位mm/s。从G0.4-G4000分11级。 eper-转子允许的不平衡率gmm/kg或转子质量偏心距μm。 ω-相应于转子最高工作转速的角速度=2πn/60≈n/10,n为转子的工作转速r/min。 10.转子单位质量的允许不平衡度(率): eper=(G×1000)/(n/10)单位:gmm/kg或μm 11.最小可达剩余不平衡量(Umar):指平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标。单位为gmm。 12.不平衡量减少率(URR):经过一次平衡修正减少的不平衡量与初始不平衡量之比值。它是衡量平衡机效率的性能指标,以百分数表示: URR(%)=(U1-U2)/U1=(1-U2/U1)×100 式中:U1-初始不平衡量 U2-一次平衡修正后的剩余不平衡量 13.校验转子:为校验平衡机性能而设计的刚性转子。 其质量、大小、尺寸均有规定,分立式和卧式两种。 立式转子质量为1.1,3.5,11,35,110 kg。 卧式转子质量为0.5,1.6,5,16,50,160,500kg。
离心机转速与离心力的换算
离心机转速与离心力的换算:(离心机分离因素计算公式) 1、分离因素的含义: 在同一萃取体系内两种溶质在同样条件下分配系数的比值。分离因素愈大(或愈小),说明两种溶质分离效果愈好,分离因素等于1,这两种溶质就分不开了。离心机上的分离因素则指的是相对离心力。 2、影响分离因素的主要因素: 离心力Centrifugal force (F) 离心力作为真实的力根本就不存在,在非惯性系中为计算方便假想的一个力。请看下面的说明:向心力使物体受到指向一个中心点的吸引、或推斥或任何倾向于该点的作用。笛卡儿把离心力解释为物体保持其“限定量”的一种趋势。它们的区别就是,向心力是惯性参考系下的,而离心力是非惯性系中的力。我们处理物理题时都是在惯性系下(此时牛顿定律才成立),所以一般不用离心力这个概念。由于根本不是一个情况下的概念,我们无法对他们的方向和大小进行比较。 F=mω2r ω:旋转角速度(弧度/秒) r:旋转体离旋转轴的距离(cm) m:颗粒质量 相对离心力Relative centrifugal force (RCF) RCF 就是实际离心力转化为重力加速度的倍数 g为重力加速度(9.80665m/s2) 同为转于旋转一周等于2π弧度,因此转子的角速度以每分钟旋转的次数(每分钟转数n或r/min)表示:一般情况下,低速离心时常以r/min来表示。 3、分离因素计算公式: RCF=F离心力/F重力= mω2r/mg= ω2r/g= (2*π*r/r*rpm)2*r/g注:rpm应折换成转/秒 例如:直径1000mm,转速1000转/分的离心机,分离因素为: RCF(1000)=(2*3.1415*16.667)^2*0.5/9.8 =104.72^2*0.5/9.8 =560 沉降离心机沉降系数: 1、沉降系数(sedimentation coefficient,s)根据1924年Svedberg(离心法创始人--瑞典蛋白质化学家)对沉降系数下的定义:颗粒在单位离心力场中粒子移动的速度。沉降系数是以时间表示的。用离心法时,大分子沉降速度的量度,等于每单位离心场的速度。或s=v/ω2r。s是沉降系数,ω是离心转子的角速度(弧度/秒),r是到旋转中心的距离,v是沉降速度。沉降系数以每单位重力的沉降时间表示,并且通常为1~200×10^-13秒范围,10^-13这个因子叫做沉降单位S,即1S=10^-13秒. 2、基本原理 物体围绕中心轴旋转时会受到离心力F的作用。当物体的质量为M、体积为V、密度为D、旋转半径为r、角速度为ω(弧度数/秒)时,可得: F=Mω2r 或者F=V.D.ω2r (1) 上述表明:被离心物质所受到的离心力与该物质的质量、体积、密度、离心角速度以及旋转半径呈正比关系。离心力越大,被离心物质沉降得越快。
离心机转速换算公式(rpm与g)
离心机转速换算公式(rpm与g)
离心力Centrifugal force (F) 离心力作为真实的力根本就不存在,在非惯性系中为计算方便假想的一个力。请看下面的说明:向心力使物体受到指向一个中心点的吸引、或推斥或任何倾向于该点的作用。笛卡儿把离心力解释为物体保持其“限定量”的一种趋势。它们的区别就是,向心力是惯性参考系下的,而离心力是非惯性系中的力。我们处理物理题时都是在惯性系下(此时牛顿定律才成立),所以一般不用离心力这个概念。由于根本不是一个情况下的概念,我们无法对他们的方向和大小进行比较。 F=mω2r ω:旋转角速度(弧度/秒) r:旋转体离旋转轴的距离(cm) m:颗粒质量 相对离心力Relative centrifugal force (RCF) RCF 就是实际离心力转化为重力加速度的倍数 g为重力加速度(9.80665m/s2) 同为转于旋转一周等于2π弧度,因此转子的角速度以每分钟旋转的次数(每分钟转数n或
r/min)表示:一般情况下,低速离心时常以r /min来表示。 3、分离因素计算公式: RCF=F离心力/F重力= mω?2r/mg= ω?2r/g= (2*π*r/r*rpm)?2*r/g = (2*π* rpm)?2*r/g =(2*π)?2/g * rpm^2* r 注:rpm应折换成转/秒,r转换成m =(2*π/60)?2/g * rpm^2* r/100=1.119 x 10-5 x (rpm)^2 x r 换算后,rpm为r/min,r为cm 例如:直径1000mm,转速1000转/分的离心机,分离因素为: RCF(1000)=(2*3.1415*16.667)^2*0.5/9.8 =104.72^2*0.5/9.8 =560 在有关离心机的实验中,RCF(relative centrifugal field)表示相对离心场,以重力加速度g(980.66cm/s2)的倍数来表示; rpm(revolution per minute,或r/min)表示离心机每分钟的转数。rmp与g之间的换算公式
关于离心机及rpm单位与g(RCF)单位的换算
关于离心机及rpm单位与g(RCF)单位的换算 离心技术在生物科学,特别是在生物化学和分子生物学研究领域,已得到十分广泛的应用,每个生物化学和分子生物学实验室都要装备多种型式的离心机。离心技术主要用于各种生物样品的分离和制备,生物样品悬浮液在高速旋转下,由于巨大的离心力作用,使悬浮的微小颗粒(细胞器、生物大分子的沉淀等)以一定的速度沉降,从而与溶液得以分离,而沉降速度取决于颗粒的质量、大小和密度。 基本原理: 当一个粒子(生物大分子或细胞器)在高速旋转下受到离心力作用时,此离心力“F”由下式定义,即: F = m&S226;a = m&S226;ω2 r a — 粒子旋转的加速度, m — 沉降粒子的有效质量,ω—粒子旋转的角速度, r—粒子的旋转半径( cm )。 通常离心力常用地球引力的倍数来表示,因而称为相对离心力“ RCF ”。或者用数字乘“g”来表示,例如25000×g,则表示相对离心力为25000。相对离心力是指在离心场中,作用于颗粒的离心力相当于地球重力的倍数,单位是重力加速度“g” (980cm/sec2),此时“RCF”相对离心力可用下式计算: ∴19×10-5×(rpm)2 r RCF = 1.1 ( rpm — revolutions per minute每分钟转数,r/min ) 由上式可见,只要给出旋转半径r,则RCF和rpm之间可以相互换算。但是由于转头的形状及结构的差异,使每台离心机的离心管,从管口至管底的各点与旋转轴之间的距离是不一样的,所以在计算是规定旋转半径均用平均半径“ra v”代替: ra v=( r min+rmax) / 2 一般情况下,低速离心时常以转速“rpm”来表示,高速离心时则以“g” 表示。计算颗粒的相对离心力时,应注意离心管与旋转轴中心的距离“r”不同,即沉降颗粒在离心管中所处位置不同,则所受离心力也不同。因此在报告超离心条件时,通常总是用地心引力的倍数“×g”代替每分钟转数“rpm”,因为它可以真实地反映颗粒在离心管内不同位置的离心力及其动态变化。科技文献中离心力的数据通常是指其平均值(RCFa v),即离心管中点的离心力。
不平衡力计算及校核
不平衡力计算及校核 1 不平衡力和不平衡力距计算 流体通过调节阀时,受流体作用力影响,产生使阀芯上下移动的轴向力或使阀芯旋转的切向力。对于直行程的调节阀,轴向力影响信号与位移的关系,这一轴向力称为不平衡力,以ft(任意位置时),Ft(关闭位置时)表示。对角位移的调节阀,如蝶阀、偏心旋转阀等,影响其角位移的切向合力矩称为不平衡力矩,以M表示。 影响不平衡力(矩)的因素很多,主要是阀的结构型式、压差、流向因素。阀的结构型式中又包括阀的类型、节流形式、阀芯(塞)形状、阀芯正装或反装、阀杆直径与阀座直径大小等关系。 从表3-1中工作状态中,可以非常直观地看出对单座式调节阀,阀芯正装,流开型,阀关闭时的阀芯所受的不平衡力Ft为: 其它阀的不平衡力(距)的推导道理一样,是一个简单的受力计算。常见的阀计算公式汇总在表3-1中。 表3-1 常用调节阀不平衡力和许用压差计算公式2 输出力定义及计算
2.1 输出力的正确定义 首先我们引入几个符号:ft 表示任意 开度的不平衡力;Ft 表示阀关闭时的不平衡力;“-”表示不 平衡力的作用方向是将阀芯顶开的;“+”表示不平衡力的作 用方向是将阀芯压闭的。
过去的定义是:执行机构用来克服不平衡力的力。这个定义有两个问题:①调节阀任意开度都存在着不平衡力ft,这样,执行机构任意开度都有输出力克服Ft,使阀信号压力与开度一一对应,ft变化不影响阀位。实际并非如此,只有带定位器时才有这种功能。②克服“+”、“-”ft问题没有区分,造成混为一体的模糊概念,导致计算错误。表现在现场时,就是有的阀关不死或打不开。 我们知道,“-” Ft对阀芯产生顶开趋势,所需执行机构的输出力应该是克服它顶开,并保证阀密封的力;“+” Ft对阀芯产生压闭趋势,所需输出力应该是保证阀启动并能走完全行程的力。于是,我们得出输出力的正确定义为:阀处关闭位置时,执行机构具有克服“—” Ft,以保证阀的密封,克服“+” Ft,以保证阀正常启动并能走完全行程的力,这种力称为执行机构输出力,以F表示。 2.2 气动薄膜执行机构输出力的正确计算 过去F计算,没考虑Ft的不同作用方向,笼统地按阀处在“-” Ft情况来处理,造成阀处在“+” Ft的情况下 工作时打不开等问题。下面分两种情 况讨论。 1)“-” Ft时的F计算 1.Ft,以保证阀密封。故其F为:(0﹤Po≤Pmax-Pr) (18) 2.Ft,以 保证阀的密封,故其F为: F=(P-Pr)·Ae (PL<P≤Pmax = (19) 2)“+” Ft时的F计算 “+” Ft所需的输出力是将阀芯打开的力。阀关闭时,阀芯受力为“+” Ft,阀一旦启动,它随开度的增加而按ft变化规律下降。由于阀从关至全开的弹簧张力变化为PrAe,所以当Ft ≥PrAe时,只要Ft 下降PrAe,则弹簧张力相应补偿PrAe,阀靠Ft减小而启动至全开。这种阀一旦启动,信号压力不变,靠Ft减小而使阀突然打开一个范围,就是我们常说“突然启跳”。当Ft﹤PrAe时,小于部分则信号压力的正常改变使阀全开。 从上述讨论中可以看出:当“+” Ft≥ PrAe时,只要保证阀启动就可保证阀全开,不必在信号压力P 中考虑阀全开而扣除Pr,即“+” Ft的F计算,不考虑Pr的影响。具体计算如下: 1.Ft,把阀芯拉开,故其F为: F=(P-Po)·Ae (Po﹤P≤Pmax) (20) 2.(2)对气闭阀,阀的启动是靠信号压力的减小,靠弹簧张力把阀拉开。故静态时,阀关闭到位时弹簧所具有 的张力,就是把阀启开的作用力,即 F=P L·Ae (PrBP L≤Pmax) (21) 3)小结 通过上述分析,还可得出如下有用的结论: 1.Ft的F计算,不扣除Pr,所以比原笼统地按“-” Ft计算要扣除Pr的输出力大得多,否定了笼统地说气动薄膜执行机构输出力小的结论。如最大执行机构的Ae=1600cm,Fmax= 2.5×1600=4吨。通常,它可比“-” Ft条件下的F大3~5倍以上。 2.(2)选用大的Pr,即可提高稳定性,又可提高“+” Ft时气闭阀的输出力。 2.Ft方向相反,故所需输出力方向也相反。如气开阀,对“-” Ft,增加F是调紧,即增大P0;对“+” Ft,增加F是调松,即要减小P0。由于过去笼统地按“-” Ft考虑,因而造成阀在“+” Ft情况下工作时F正好是减小,这就是“+” Ft时有的阀关不死,或打不开的原因所在。 3.Ft比“-” Ft获得更大的F,故阀在“-” Ft的情况下不能正常工作时,可以通过改变流向的办法,使阀在“+” Ft的情况下工作,使之克服不平衡力。 4.Ft情况下工作(通常为流闭型)。这样,一方面它可获得比“-” Ft大3~5倍以上的许用压差,另一方面,“+”Ft的作用是将阀芯压紧,增加了阀芯对阀座的密封力,提高了切断效果,通常泄漏量可比“-” Ft小(80~90)%。 2.3 活塞执行机构的输出
离心力和转速之间的简单换算(精)
离心力和离心转速的换算是经常用到的,具体的计算公式如下: RCF = 1.118 ×10-5×N2×R RCF表示相对离心力,单位为g N表示转速,单位为rpm转/分 R表示离心半径,单位为cm。 离心就是利用离心机转子高速旋转产生的强大的离心力,加快液体中颗粒的沉降速度,把样品中不同沉降系数和浮力密度的物质分离开。离心力(F的大小取决于离心转头的角速度(ˉ,r/min和物质颗粒距离心轴的距离(r,cm。它们的关系是:F=ˉ2R 为方便起见,F常用相对离心力也就是地心引力的倍数表示。即把F值除以重力加速度g(约等于9.8m/s2得到离心力是重力的多少倍,称作多少个g。例如离心机转头平均半径是6cm,当转速是60000r/min时,离心力是240000×g,表示此时作用在被离心物质上的离心力是日常地心引力的24万倍。 因此,转速r/min和离心力g值之间并不是成正比关系,还和半径有关。同样的转速,半径大一倍,离心力(g值也大一倍。转速(r/min和离心力(g值之间的关系可用下式换算: 其换算公式如下:Mt\lS_x~RV G=1.11*10(-5*R*(rpm2 G为离心力,一般以g(重力加速度的倍数来表示。 10(-5即:10的负五次方。 (rpm2即:转速的平方。 R为半径,单位为厘米。
例如,离心半径为10厘米,转速为8000, 其离心力为: G=1.11*10(-5*10*(80002=7104 即离心力为7104g.而当离心力为8000g时,其转速应为:8489即约为8500r pm. 值得注意的是,这里跟半径是相关的。也就是说,不同的离心机其换算关系是不一样的。 普通离心机可以用计算器算一下,很准。而低温离心机则不须如此费事。上面有按钮可以在rpm与g之间切换,非常方便。 以前的文章,尤其是国内的文章通常以rpm来表示。现在多倾向于以g来表示。 转速有离心力(×g和每分钟转速(rpm两种表示方式,有些离心机没有自动切换功能。下面的公式可以帮助解决这个问题: g=r×11.18×10-6×rpm2(式中r为有效离心半径,即从离心机轴心到离心管桶底的长度 如:转速为3000r pm,有效离心半径为10cm,则离心力为=10×11.18×10- 6×30002=1006.2(×g。
滚筒允许残余不平衡量的计算
滚筒允许残余不平衡量的计算 本计算方法,主要参考IS01940--73《刚性旋转体的平衡品质》中的有关内容制订的。 A1 平衡精度等级 滚筒为刚性转子,其平衡精度等级系指许用偏心距(e)与刚性转子角速度(ω)的乘积(eω)。按eω乘积的大小,分G0.4、G1、G2.5、G6.3、G16……等11个精度等级。eω的单位为mm/S.ω=2πn/60-n/10,n为最高工作转速 (r/min)。 A2 允许残余不平衡量的确定。 A2.1 允许残余不平衡量的允差为±15%。 A2.2 允许残余不平衡量的计算 A2.2.1 滚筒动平衡为双面平衡,在两个校正平面中,每一个平面上的允许残余不平衡量按公式(A1)计算。 式中:M-允许残余不平衡量,g·mm; e-许用偏心距,μm; m-滚筒质量,g。 A2.2.2 允许残余不平衡量的计算实例
例:车速台滚筒直径为185mm,滚筒两端面的距离为1000mm,最高工作转速3450r/min,质量为67.8kg,试求滚筒允许残余不平衡量。 解: a.因为滚筒两端面距离(1000mm)与直径(185mm)之比等于5.4大于0.2,所以平衡方式为动平衡。 b.选择平衡精度等级为G6.3,见图A1。 c.由图A1查出滚筒最高工作转速为3450r/min时,许用偏心距e=16μm。 d.按公式(A1)计算允许残余不平衡量为: e.当允差为±15%时,则允许残余不平衡量的允许范围在453-610g·mm之间。
平衡精度等级 考虑到技术的先进性和经济上的合理性,国际标准化组织(ISO)于1940年制定了世界公认的 ISO1940平衡等级,它将转子平衡等级分为11个级别,每个级别间以2.5倍为增量,从要求最高的G0.4到要求最低的G4000。单位为公克×毫米/公斤(gmm/kg),代表不平衡对于转子轴心的偏心距离。如下表所示: G4000 具有单数个气缸的刚性安装的低速船用柴油机的曲轴驱动件 G1600 刚性安装的大型二冲程发动机的曲轴驱动件 G630 刚性安装的大型四冲程发动机的曲轴驱动件 弹性安装的船用柴油机的曲轴驱动件 G250 刚性安装的高速四缸柴油机的曲轴驱动件 G100 六缸和多缸高速柴油机的曲轴传动件;汽车、货车和机车用的发动机整机 G40 汽车车轮、轮毂、车轮整体、传动轴,弹性安装的六缸和多缸高速四冲程发动机的曲轴驱动件 G16 特殊要求的驱动轴(螺旋桨、万向节传动轴);粉碎机的零件;农业机械的零件;汽车发动机的个别零件;特殊要求的六缸和多缸发动机的曲轴驱动件 G6.3 商船、海轮的主涡轮机的齿轮;高速分离机的鼓轮;风扇;航空燃气涡轮机的转子部件;泵的叶轮;机床及一般机器零件;普通电机转子;特殊要求的发动机的个别零件 G2.5 燃气和蒸汽涡轮;机床驱动件;特殊要求的中型和大型电机转子;小电机转子;涡轮泵 G1 磁带录音机及电唱机、CD、DVD的驱动件;磨床驱动件;特殊要求的小型电枢 G0.4 精密磨床的主轴;电机转子;陀螺仪
不平衡量的计算
个一般是根据ISO-1940来的 平衡品质级别G=e*w/1000 其中e为偏心距,w为转速 最大许用不平衡量=e*转子总质量 对于汽轮机而言,一般要达到G2.5的平衡品质级别 算出转子的许用不平衡量m,首先要知道转子的质量M,校正半径r,转子的角速度w, 转子的动平衡精度等级G(可查到,已知量)。 然后根据公式: m=Mx(G/wxr) m.M的单位是g w的单位是rad/s r的单位是mm G的单位是mm/s 注:本文来自网络,非原创,其实这些东西一搜就能弄到的大家多动手才是
转子动平衡精度等级(品质等级)国际标准 及许用不平衡量计算方法 考虑到技术的先进性和经济上的合理性,国际标准化组织(ISO)于1940年制定 了世界公认的ISO1940平衡等级,它将转子平衡等级分为11个级别,每个级别间以2.5 倍为增量,从要求最高的G0.4到要求最低的G4000。单位为公克×毫米/公斤(gmm/kg) ,代表不平衡对于转子轴心的偏心距离。 常用各种刚性转子的平衡品质等级见下表:平衡品 质等级G eperω (mm/s) 转子类型举例 G4000 4000 具有奇数个汽缸刚性安装的低速用柴油机的曲轴驱动装置 。 G1600 1600 刚性安装的大型二冲程发动机的曲轴驱动装置。
G630 630 刚性安装的船用柴油机的曲轴驱动件;刚性安装的大型四冲 程发动机的曲轴驱动件。 G250 250 刚性安装的高速四缸柴油机的曲轴驱动。 G100 100 六缸或更多缸高速柴油机的曲轴驱动件;汽车、货车和机车 用的(汽油、柴油)发动机整机。 G40 40 汽车车轮、箍轮、车轮总成、驱动轴;弹性安装的六缸或更多 缸高速四冲程(汽油或柴油)发动机曲轴驱动件;汽车、货车和机车用的发动机的曲 轴驱动件。 G16 16 粉碎机、农业机械的零件;汽车、货车和机车用的(汽油、柴 油)发动机个别零件;特殊要求的六缸或更多缸发动机曲轴驱动件。