手把手定制IBM Tivoli Netcool Webtop界面

手把手定制I B M Ti vol i N et cool W ebt op
界面
IBM Tivoli Netcool 作为Tivoli家族中的旗舰产品之一,为业界提供了最优秀的网络管理解决方案,其成熟领先的管理思想和管理技术为中国乃至全球的大型金融、电信、企业、政府网络提供了实效可靠的运维支持。而作为IBM Tivoli Netcool的核心产品,IBM Tivoli Netcool OMNIbus 是一款航母级的服务和业务保证系统。IBM Tivoli Netcool OMNIbus实
服务器、大型机、
时收集并整合来自各种网络环境的事件和警报。这些事件和警报包括服务器
服务器
路由器、SNMP 设备、W i ndow s系统、U N I X应用程序、网路交换机、语音交换机、IP 路由器
网络管理应用程序和框架等等。通过与现有管理系统和应用程序进行协作,IBM Tivoli Netcool OMNIbus 能够将部署时间降至最低并支持员工继续使用他们现有的网络管理技巧。
作为先进的可定制呈现平台,IBM Tivoli Netcool Webtop 通过HTML 和Java? 向远程操作员交付图形、表和事件列表,用户能够利用IBM Tivoli Netcool Webtop 的灵活界面和高级管理功能来管理IBM Tivoli Netcool OMNIbus的告警。IBM Tivoli Netcool Webtop 应用程序通过添加一组新的图形视图以及灵活和管理功能扩展了IBM Tivoli Netcool OMNIbus 的能力。这种支持Web 的界面允许从IBM Tivoli Netcool OMNIbus 监视和查
浏览器进行访问,IBM Tivoli Netcool 看海量管理数据。由于可以从任何支持Java 的Web 浏览器
Webtop能够让运维人员和管理人员无论何时何地均可对服务状态与相关信息进行有效的
实时访问。
I B M Ti vol i N et cool W ebt op的作用
* 通过Web界面对IBM Tivoli Netcool OMNIbus海量的管理数据进行全面展示
* 在一个Web页面上集中显示多个Object Server
* 提供与IBM Tivoli Netcool OMNIbus完全相同的事件列表(Event List),并包括了可执行SQL语句,命令及CGI脚本的各种工具,同时支持连接外部网页
* 通过地图等图形化模式显示各实体(Entit i e s)及其相互之间的逻辑关系
I B M Ti vol i N et cool W ebt op的页面元素
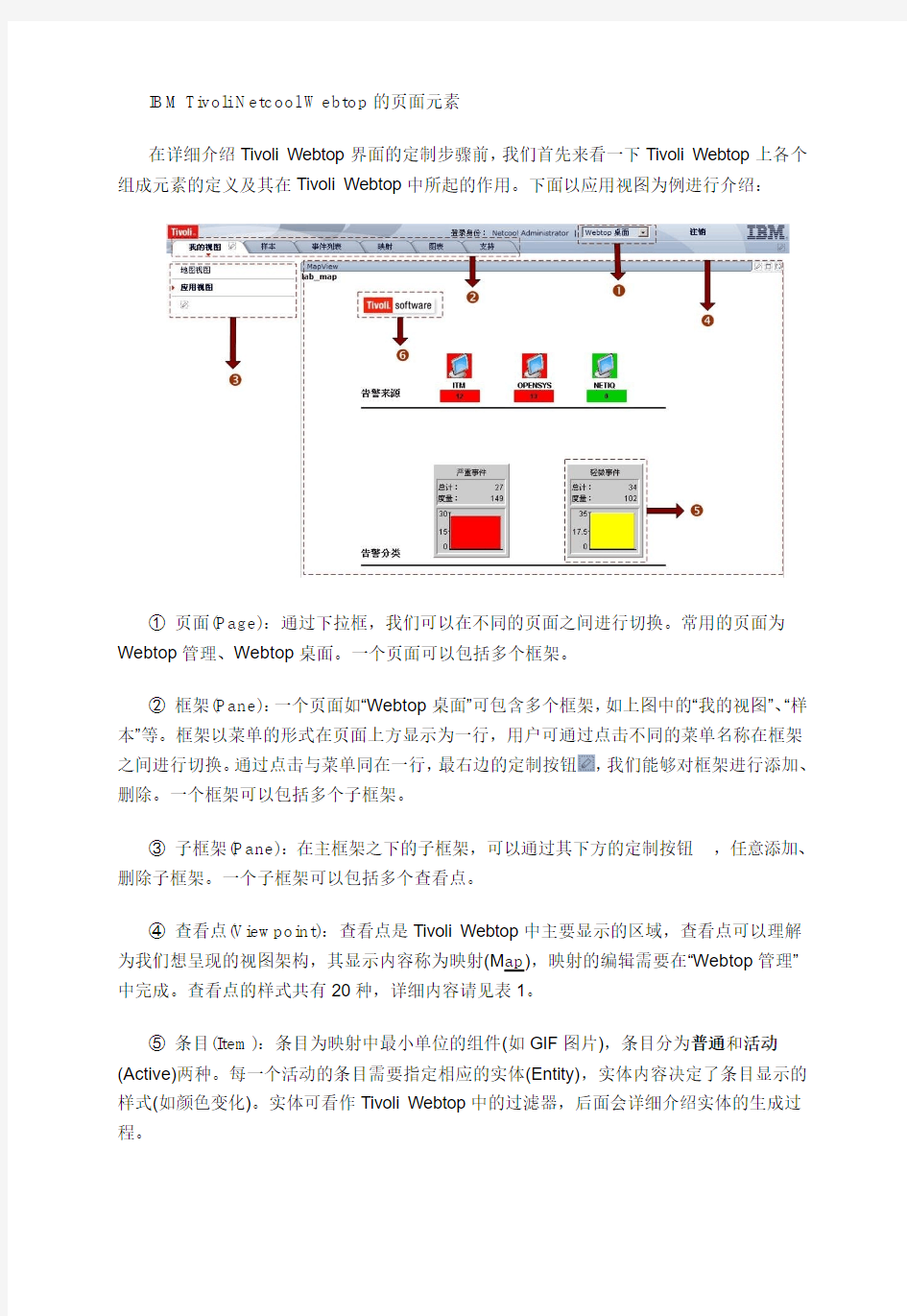
在详细介绍Tivoli Webtop界面的定制步骤前,我们首先来看一下Tivoli Webtop上各个组成元素的定义及其在Tivoli Webtop中所起的作用。下面以应用视图为例进行介绍:
①页面(P age):通过下拉框,我们可以在不同的页面之间进行切换。常用的页面为Webtop管理、Webtop桌面。一个页面可以包括多个框架。
②框架(P ane):一个页面如“Webtop桌面”可包含多个框架,如上图中的“我的视图”、“样本”等。框架以菜单的形式在页面上方显示为一行,用户可通过点击不同的菜单名称在框架之间进行切换。通过点击与菜单同在一行,最右边的定制按钮,我们能够对框架进行添加、删除。一个框架可以包括多个子框架。
③子框架(P ane):在主框架之下的子框架,可以通过其下方的定制按钮,任意添加、删除子框架。一个子框架可以包括多个查看点。
④查看点(V i ew poi nt):查看点是Tivoli Webtop中主要显示的区域,查看点可以理解为我们想呈现的视图架构,其显示内容称为映射(M ap),映射的编辑需要在“Webtop管理”中完成。查看点的样式共有20种,详细内容请见表1。
普通和活动
活动
普通
⑤条目(I t em):条目为映射中最小单位的组件(如GIF图片),条目分为普通(Active)两种。每一个活动的条目需要指定相应的实体(Entity),实体内容决定了条目显示的样式(如颜色变化)。实体可看作Tivoli Webtop中的过滤器,后面会详细介绍实体的生成过程。
source):我们可以在映射中添加多个图片。但如果系统里没有我
⑥映射资源(M ap R e esource)
们希望的图片,则我们可以针对某个映射添加自定义的图片,我们称之为映射资源。如上图的Tivoli图标,即我们手工添加的映射资源。
(表1:查看点类别)
分步定制Ti vol i W ebt op界面
应用视图
地图视图
条形图视图
在此教程中,我们假设所有事件已经汇聚到IBM Tivoli Netcool OMNIbus当中,事件分别来源于三类系统(Manager),分别是ITM、OPENSYS和NetIQ;涉及到的设备分别位于三个城市(Lo ca tion),分别为SZ、GZ及DG;对应的设备(Node)包括,SZDevice1、GZDevice1、GZDevice2和DGDevice1。所有事件的列表如下图所示:
接下来,我们将会选择Tivoli Webtop的三种典型视图(应用视图/地图视图/条形图视图)为例,详细介绍Tivoli Webtop界面的客户化定制步骤。
第一步::生成框架
第一步
用户登录进入Tivoli Webtop后,选择页面上方的下拉框为“Webtop桌面”,在该页面点击最右边的定制按钮,进入框架编辑页面。
在框架编辑页面,点击“添加窗格”按钮,以进入窗格添加页面。
在文本框中输入待添加窗格的名称,并点击“保存并应用”按钮返回上一页面。
我们可以看到在定制窗格的页面里,新增加了“我的视图”这一行。通过多次点击“我的视图”右边的图标,我们可以将其移到第一行,从而让“我的视图”标签在菜单栏内第一个显示。
接下来我们需要在我的视图窗格内创建三个子窗格,因此点击“我的视图”。
在“我的视图”页面,选择“布局”下拉框中的内容为“菜单窗格”。点击“添加窗格”按钮,进入子窗格名称输入页面。
在文本框中输入子窗格的名称(如:应用视图),点击“保存并应用”按钮回到上一页面。再次点击“添加窗格”按钮,依次生成“地图视图”、“条形图视图”。
点击“保存并应用”按钮,回到“定制窗格”主页面,点击“保存并应用”按钮。
回到“Webtop桌面”,我们可以看到在最上方的菜单中多了一项“我的视图”,并在该页面的最左边新增了三个视图的文字标签(应用视图/地图视图/条形图视图),点击其中任一个标签,你将看到显示内容区域均为空白的。
接下来,我们需要为每个视图添加内容。
* 应用视图
第二步::添加查看点
第二步
通过编辑视图的属性,我们可以添加查看点。同样,点击子框架菜单栏下的定制按钮,进入子框架编辑页面。
点击“应用视图”,进入“应用视图”编辑页面。
在添加查看点之前,我们可通过下拉框选择查看点的布局。查看点的布局包括一列到多列,在本例中我们选择一列,点击上方的“添加查看点”按钮,进入下一页面选择查看点的类型。
选择标题为“MapView”,并点击“保存并应用”按钮(查看点的类型请见表1)。
点击“保存并应用”按钮,回到子框架编辑页面,再次点击“保存并应用”按钮。
在视图页面我们可以看到系统提示“未指定映射”,通过右边的定制按钮(笔状图标)我们可以指定相应的映射。但由于我们之前还未创建映射,此时尚无须指定。
第三步::创建实体
第三步
前面我们说过,映射的组件是各种条目,而活动条目(Active entities)又是与实体一一对应的。因此,在创建条目之前,我们首先需要定义实体。
在上图中,我们可以发现一共有8个活动条目,其中条目1/2、3/4、5/6采用同一个实体。也就是说,我们在此实用视图中,需创建至少5个实体。
通过“页面切换”下拉框,我们进入“Webtop管理”页面,选择左边的“实体”菜单。在“实体浏览器”页面,列出了已定义的实体名称,通过点击“添加实体”按钮,我们可以创建一个自定义的实体。
在“名称”的文本框中输入新实体的名称,选择类型为“已过滤”,在“度量”一行,选择函数为“合计”,字段为“Tally”(Tally意思为Count,即指事件的出现次数)。点击“添加此实体”按钮,进一步修改此新实体。
在“过滤器”的文本框中,输入“Manager = ‘ITM’ and Severity > 3”,过滤出来源于ITM 并且重要级别大于3的所有事件。
参照ITM实体创建的过程,我们可以依次生成其它4个实体。
第四步
第四步::创建映射
在“Webtop管理”页面,选择左边的“映射”菜单。在“映射浏览器”页面,列出了已定义的映射名称,通过点击“创建映射”按钮,我们创建一个自定义的映射。
在弹出的“Java映射编辑器”里,输入新映射名称appmap后,点击“确定”按钮。
首先,我们需要调整映射的大小,设宽度为550,高度为500。
在映射工作区内,按上图所示,我们可以根据自己需要将各种条目加入到工作区内(注:建议随时使用“保存“按钮对当前状态进行保存)。正如前面所提,活动条目需要跟实体关联,否则在映射中该活动条目无法正确反映我们需要关心的信息。下面以ITM活动按钮为例,介绍如何将活动条目与实体关联。
选中ITM活动按钮,点击鼠标右键,在弹出的菜单中选择“属性”。
在弹出的窗口中,在默认的“属性”标签页内,我们在标签文本框中输入ITM(注:名称文本框内的内容仅用于映射编辑器内条目的区分,在此可忽略),接着选择图像下拉框中的文件,即我们希望出现在映射中的图像。
在“关联”标签页内,我们选择“操作”的下拉框为“活动事件列表(AEL)”,“实体”下拉框中选择我们在第三步已创建好的ITM实体,将“启用闪烁”前的选择框选中。点击“确定”按钮,保存配置结果并关闭窗口。
通过同样的方式,我们能够对其它活动条目逐一设置。
第五步::指定映射
第五步
在映射浏览器中,我们可以预览映射效果。具体操作为,在映射列表中选择我们希望预览的映射名称,点击右边的“预览映射…”按钮,即可在新弹出的窗口中看到该映射最新的显示效果。当对映射显示满意后,我们可以回到“Webtop桌面”页面,定位到“我的视图”中的“应用视图”界面。
点击“定制按钮”,进入映射指定页面。
在“映射”对应的下拉框中选择我们刚创建的映射appmap,同时将高度文本框中的数值改为500,点击“完成”按钮。系统保存结果,返回到“应用视图”显示的页面。
至此,我们完成了“应用视图”的客户化定制工作。
* 地图视图
“地图视图”的定制过程与“应用视图”类似,下面仅描述两者之间的不同之处。
创建实体
在“地图视图”中,总共6个活动条目,包括3个“矩形活动按钮”及3条“活动线”。每个条目对应的实体均不同,因此实体相应也为6个:
创建映射
在创建“地图视图”的映射时,我们使用了非系统提供的地图。要使用自定义的图像文件,我们可以通过“Webtop管理”中的“映射资源”来导入。具体过程如下:
参照“应用视图”中的第四步,创建一个新的映射,但不对其内容进行添加。
在“映射资源”界面中,选择我们新创建的映射,点击“添加映射资源”按钮。
在“添加映射资源”页面,点击“浏览…”按钮来选择本地的我们希望上传的图像文件后,点击“添加资源”,记住其文件名。
在“Java映射编辑器”内,背景一栏的下拉框中选择我们刚导入的图像文件即可。
* 条形图视图
“条形图视图”与前面两种视图完全不同,主要在于其对应的查看点类型不是MapView,而为ChartView。由于其无须定义实体,因此创建过程相应简单许多。
在“定制窗格”页面中,我们点击“条形图视图”,对其进行定制。
PLC控制的工业机械手设计
学院 课程设计说明书 题目:基于PLC控制的工业机械手 专业:机电一体化技术 班级: 学号: 姓名: 指导老师: 二○一○年十一月三日
摘要 机械手在先进制造领域中扮演着极其重要的角色。它可以搬运货物、分拣物品、代替人的繁重劳动。可以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因此被广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 本文在纵观了近年来机械手发展状况的基础上,结合机械手方面的设计,对机械手技术进行了系统的分析,提出了用气动驱动和PLC控制的设计方案。采用整体化的设计思想,充分考虑了软、硬件各自的特点并进行互补优化。对物料分拣机械手的整体结构、执行结构、驱动系统和控制系统进行了分析和设计。在其驱动系统中采用气动驱动,控制系统中选择PLC的控制单元来完成系统功能的初始化、机械手的移动、故障报警等功能。最后提出了一种简单、易于实现、理论意义明确的控制策略。 通过以上部分的工作,得出了经济型、实用型、高可靠型工业机械手的设计方案,对其他经济型PLC控制系统的设计也有一定的借鉴价值。 关键词:机械手,气动控制,可编程控制器(PLC),自动化控制。
学院 课程设计说明书 题目:基于PLC控制的工业机械手 专业:机电一体化技术 班级: 学号: 姓名: 指导老师: 二○一○年十一月三日
毕业设计任务书 机电工程系机电一体化技术专业 学生姓名学号 一、毕业设计题目:PLC控制的工业机械手设计 二、毕业设计时间 2010 年11月1日至2010年 11 月 28日 三、毕业设计地点: 四、毕业设计的内容要求: 1、系统的电路原理图。 2、元器件的明细表。 3、毕业设计说明书包含工作原理、系统结构、控制过程、控制流程图机控制程序等,字数不少于6000字。 4、设计格式按照要求完成。 指导教师年月日
演讲常用手势有哪些.doc
演讲常用手势有哪些 演讲,差不多同时存在两种语言:一是口头的有声语言, 一是身体的态势语言,是无声的。手势则是态势语之一,演讲时其使用频率之高仅次于面部表情。下面我为你整理演讲常用手势,希望能帮到你。 1仰手式 即掌心向上,拇指张开,其余几指微曲。手部抬高表示欢欣、赞美、申请祈求;手部放平是表示诚恳地征求听众的意见,取得支持;手部降低表示无可奈何。 2覆手式 即掌心向下,手指状态同上,这是审慎的提醒手势,演讲者有必要抑制听众的情绪,进而达到控制场面的目的,也可表示否认、反对等。 3切手式 即手掌挺直全部展开,手指并拢,像一把斧子迅速地劈下,表示果断、坚决、快刀斩乱麻等。 4啄手式 即手指并拢呈簸箕形,指尖向着听众。这种手势具有强烈的针对性、指示性,但也容易形成挑衅性、威胁性,一般是对相识的听众或是与演讲者有某种关联时才使用。 小学生演讲手势
一、手势的分类 演讲的手势是多种多样的,但是也有一定的规律可循,按它的运用方式、意思大致可以分为以下几种: A :情意手势。这种手势主要是表达演讲者喜、怒、乐的强烈情感,使具体化。比如:讲到胜利成功时,演讲者拍手称快;讲到非常气愤的事情时,演讲者双手握拳,不断颤抖;讲到着急、担心时,演讲者双手互搓。情意手势既能渲染气氛,又助于情感的传达,在演讲中使用的频率最高。 B:指示手势。这种手势有具体指示对象的作用。它可以使听众看到真实的事物。比如讲到"你"、"我"、"他"或"这边"、"那边"、"上头"、"下头"时,都可以用手指一下,给听众更清楚的印象。这种手势的特点是动作简单、表达专一,基本上不带感情色彩。这种手势只能指示听众的视觉可以感知的事物和方向,视觉不及的,不能运用这种手势。 C :形象手势。这种手势主要用来摹仿事物,给听众一种形象的感觉。比如演讲者到"袖珍电子计算机只有这么大"的同时,用手比划一下,听众就具体知道它的大小了。在讲到"微型的照相机只有现在的进口打火机那么大"时,用手势配合一下,既具体又形象。 D:象征手势。这种手势可以表示抽象的意念,用得准确恰当能引起听众的联想,例如讲到"让我们扬起理想的风帆,向着光辉有未来前进!""同志们,冲啊!"用右手向前上方有力地伸
气动机械手的PLC控制系统的设计
毕业设计报告 课题:气动机械手PLC控制系统的设计 系部:电气工程系 专业:机电一体化技术 班级:机电092 姓名:XXX 学号:XXXXXXX 指导老师:XXXX 2011.3
江苏信息职业技术学院毕业设计报告 目录 摘要 (3) 第一章机械手的简介 (4) 1.1 概述 (4) 1.2 机械手的组成 (4) 1.3 机械手的应用 (4) 1.4 机械手应用 (4) 第二章机械手机械设计 (5) 2.1 机械手总体结构设计 (5) 2.2 机械手的工作原理 (6) 2.3 机构模块化设计 (7) 2.4 手部结构设计 (8) 第三章机械手机械控制设计 (10) 3.1 工作过程与控制要求 (10) 3.2 气动驱动设计的简述 (11) 3.3 PLC控制系统设计 (12) 结束语 (20) 谢辞 (21) 参考文献 (22)
气动机械手PLC控制系统的设计 气动机械手PLC控制系统的设计 摘要:气动技术具有一系列显著优点,在工业生产中得到越来越广泛的应用,己成为自动化不可缺少的重要手段。进入 90 年代后,气动技术更突破传统死区,经历着飞跃性进展。再者,冲压自动化是解决冲压生产成本及安全问题、提高冲压生产企业效益的必然选择,而冲压机械手是冲压自动化的重要组成部分。但是,目前冲压机械手高昂的价格却使国内众多的中小冲压企业望而却步。 PLC是以现代微处理器技术为核心的控制器,作为一种通用的工业控制器,其可靠性高、抗干扰能力强;PLC由于采用现代大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性,此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息;PLC采用光电隔离和滤波技术技术有效抑制外部干扰源对PLC的影响,此外PLC还可在强、通用性好;开发周期短,功耗小。本课题对现代工业的的发展具有很重要的意义。 关键词:意义,应用,原理,plc,机械手,气动控制技术
机械手的PLC控制 PLC课程设计
一、要求 机械手的PLC控制 1.设备基本动作:机械手的动作过程分为顺序的8个工步:既从原位开始经下降、夹紧、上升、右移、下降、放松、上升、左移8个动作后完成一个循环(周期)回到原位。并且只有当右工作台上无工件时,机械手才能从右上位下降,否则,在右上位等待。 2.控制程序可实现手动、自动两种操作方式;自动又分为单工步、单周期、连续三种工作方式。 3.设计既有自动方式也有手动方式满足上述要求的梯形图和相应的语句表。 4. 在实验室实验台上运行该程序。 二参考 1. “PLC电气控制技术——CPM1A系列和S7-200” 书中212页“8.1.3机械手的控制” 2. “机床电气控制”第三版王炳实主编 书中156页“三、机械手控制的程序设计”。 3.“可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。其中工作方式时手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。 注解: “PLC电气控制技术——CPM1A系列和S7-200”书中212页“8.1.3机械手的控制”例中只有手动和自动(连续)两种操作模式,使用顺序控制法编程。PLC 机型选用CPM2A-40型,其内部继电器区和指令与CPM1A系列的CPM有所不同。 “机床电气控制”第三版王炳实主编书中156页“三、机械手控制的程序设计”。本例中的程序是用三菱公司的F1系列的PLC指令编制。有手动、自动(单工步、单周期、连续)操作方式。手动方式与自动方式分开编程。参考其编程思想。 “可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。其中工作方式有手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。用CPM1A编程。 这里“误操作禁止”是指当自动(单工步、单周期、连续)工作方式时,按
最新整理手把手教你做演讲手势
手把手教你做演讲手势 不管是在演讲中,还是在现实生活与工作的交流沟通中,手掌的运用是最普及、最常见、最频繁的,它是手势语的主角和态势语的重头戏。下面学习啦小编分享了手把手教你做演讲手势,希望你喜欢。 手掌手势的基本要领:拇指张开,其余四指自然并拢微曲,手臂(手臂分为三段:上臂、前臂与手)根据手掌的位置而灵活变化。 套常用的手掌动作(1)伸手(手心向上,前臂略直,手掌向前平伸)表示请求、交流、许诺、谦逊、承认、赞美、希望、欢迎、诚实等意思。 伸手训练:人活在世上,谁不希望自己的一生过得有意义、有价值一些呢?自己活着,就是为了使别人生 活得更美好! (2)抬手(手心向上,手臂微曲,手掌与肩齐高)表示号召、唤起、祈求、激动、愤怒、强调等。 抬手训练:尊敬的各位领导、各位来宾,亲爱的同学们,大家早上好!给人民当牛做马的人,人民把他抬 得很高很高! (3)举手(五指朝天,前臂垂直,手掌举至头部)表示
行动、肯定、激昂、动情、歌颂等 举手训练:人生的价值在于奉献,生命的真谛在于创造!经验证明,能使大多数人得到幸福的人,他本身 也是幸福的。 (4)挥手(手臂向前,手掌向上挥动)表示激励、鼓动、号召、呼吁、前进、致意等。 挥手训练:努力吧!奋斗吧!我们的明天一定会更加美好!同志们,朋友们:让我们在爱国主义的旗帜指引 下奋勇前进吧! (5)推手(手心向前,前臂直伸)表示坚决、制止,果断、拒绝、排斥、势不可挡等意。 推手训练:不!不能这样!这不是我们的逻辑!谁不属于自己的祖国,那么他也就不属于人类。 (6)压手(手心向下,前臂下压至下区)表示要安静、停止、反对、压抑、悲观或气愤等。 压手训练:时间就是生命,无端地浪费别人的时间,其实是无异于谋财害命的。谁若把金钱看得比荣誉还尊贵,谁就会从高贵降到低贱。 (7)摆手(手心对外,前臂上举至中区上部)表示反感、蔑视、否认、失望、不屑一顾等。
基于西门子S7_200PLC控制的机械手项目技术报告
概要 本文介绍了用PLC S7-200为控制电路主元件,外加电器系统,输入输出电路,构成了整体的实训项目。通过PLC控制机械手来模拟工业生产过程中机电设备的工作原理。工业机械手的任务是搬运物品,要求把物品从一个工位搬到另一个工位,如下图所示。机械手的全部动作由气缸驱动,而气缸又由相应的电磁阀控制,这样使我们能更近距离地了解工业生产过程。 左移
目录 前言 第一章机械手简介. . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .5 1.1 机械手概念 1.2 机械手总体结构 第二章PLC介绍. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .6 2.1 PLC发展史 2.2 PLC应用 2.3 PLC特点 第三章汽缸简介. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .8 3.1汽缸概念与汽缸分类 3.2汽缸结构与工作原理 第四章相关元气件. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . .9 4.1电磁阀介绍 4.2传感器介绍 第五章项目的实施. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . .11 5.1机械手的控制要求. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . .11 5.2机械手总体设计方案. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . .11
(完整版)基于plc的机械手控制系统设计
前言 随着我国工业生产的飞跃发展,自动化程度的迅速提高,实现工件的装卸、转向、输送或操持焊枪、喷枪、扳手等工具进行加工、装配等作业的自动化,已愈来愈引起人们的重视。 机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。 机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。 本文将通过西门子PLC控制机械手,PLC是可编程控制器(Programmable Logic Controller)的简称,是在继电顺序控制基础上发展起来的以微处理器为核心的通用的工业自动化控制装置。随着电子技术和计算机技术的迅猛发展,PLC的功能也越来越强大,更多地具有计算机的功能。目前PLC已经在智能化、网络化方面取得了很好的发展。该系统利用西门子PLC,在步进电机驱动下,完成对机械手在搬运过程中的下降、夹紧、上升、右旋、下降、放松、上升、左旋等全过程自动化控制,并对非正常情况实行自动报警和自动保护,实现企业的机电一体化,提高企业的生产效率。
演讲的手势和站姿.doc
演讲的手势和站姿 演讲是指在公众场所,以有声语言为主要手段,以体态语言为辅助手段,针对某个具体问题,鲜明、完整地发表自己的见解和主张,下面是我分享的演讲的手势和站姿,一起来看看吧。 演讲的手势和站姿介绍 一、演讲者站姿规范 (1)脊椎、后背挺直,胸略向前上方挺起。 (2)两肩放松,重心主要支撑脚掌脚弓上。 (3)挺胸,收腹,精神饱满,气息下沉。 (4)脚应绷直,稳定重心位置。 二、演讲站姿分类 (1)前进式 这种姿势是演讲者用得最多,使用最灵活的一种站姿。右脚在前,左脚在后,前脚脚尖指向正前方或稍向外侧斜,两脚延长线的夹角成45 度左右,脚跟距离在15厘米左右。这种姿势重心没有固定,可以随着上身前倾与后移的变化而分别定在前脚跟与后脚上,不会因时间长而身体无变化不美观。另外,前进式能使手势动作灵活多变,由于上身可前可后,可左可右,还可转动,这样能保证手做出不同的姿势,表达出不同的感情。 (2)稍息式 一脚自然站立,另一只脚向前迈出半步,两脚跟之间相距约厘米左右,两脚之间形成75度夹角。运用这种姿势,形象比较单一,重心总是
落在后脚上。一般适应于长时间站着穿叮扁顾壮该憋双铂晶演讲中的短期更换姿势,使身体在短时间里松弛,得到休息,一般不长时间单独使用,因为它给人一种不严肃之感。 (3)自然式 两脚自然分开,平行相距与肩同宽,约20厘米为宜,太平会影响呼吸声音的表达,太迂则显得拘束。 演讲手的摆放位置 在演讲中,手放哪里很让我们头疼。 1.如果你在讲台后面,你可以双手自然放在讲台两侧。 2.如果没有的话,双手自然垂在身体两侧,也可以用手来操作媒体、握住提示卡、笔或是做手势等。 3.无论在什么情况下,都不该把双手置于裤子口袋内,或是不自然地手臂交叉。 演讲中常用的11种手势介绍 (1)伸手(手心向上,前臂略直,手掌向前平伸)——表示请求、交流、许诺、谦逊、承认、赞美、希望、欢迎、诚实等意思。 伸手训练:"人活在世上,谁不希望自己的一生过得有意义、有价值一些呢?" "自己活着,就是为了使别人生活得更美好!" (2)抬手(手心向上,手臂微曲,手掌与肩齐高)——表示号召、唤起、祈求、激动、愤怒、强调等。 抬手训练:"尊敬的各位领导、各位来宾,亲爱的同学们,大家早
演讲手势30种
演讲手势30种 演讲的手势可以说是“词汇”丰富,千变万化,没有一个固定的模式。作为一个出色的演讲者平时要认真观察生活,刻苦训练,积极付出实践,今天WTT小雅给大家分享一些演讲中的30种手势,希望对大家有所帮助。 演讲手势30种 1.拇指式,竖起大拇指,其余四指弯曲,表示强大,肯定,赞美,第一等意。 5.小指式,竖起小指,其余四指弯曲,合拢表示精细,微不足道或藐视对方,这一手势演讲中用得不多。 63食指式,食指伸出,其余四指弯曲并拢,这一手势在演讲中被大量采用,用来指称人物,事物,方向,或者表示观点甚至表示肯定,胳膊向上伸直,食指向空中则表示强调,也可以表示数字“一”“十”“百”“千”“万”--演讲中右手比左手使用的频率大,手指不要太直,因为面对听众手指太直,针对性太强。 4.食指弯曲或钩形表示9、90、--齐肩划线表示直线,在空中划弧线表示弧形、 5.食指,中指,并用式,食指、中指分开伸直,其余三指弯曲,这一手势在一些欧美国际与非洲国家表示省略的意思,由前
英国首相丘吉尔在演讲中大量推广。我们在演讲中运用时一般表示21、20、200-- 6.中指,无名指,小指三指并用式,表示3、30、300-- 7.食指,中指,无名指,小指四指并用式。表示4、40、400-- 8.五指并用式。如果是五指平伸且分开,表示5、50、500--如果指尖向上并拢,掌心向外推出,有向前,希望等意思,显示出坚定于力量,又叫手推式。 9.母子,小指并用式。拇指与小指同事伸出,其余三指并拢弯曲,表示6、60、600-- 10.拇指食指并用式。拇指,食指分开伸出,其余三指弯曲表示8、80、800--如果并拢表示肯定,赞赏之意,如果二者弯曲靠拢但未接触,则表示“微小”“精细”之意。 11.拇指,食指,中指并用式,三指相捏向前表示“这”“这些”。用力点表示强调,也表示数字7、70、700-- 12.O型手势,又叫圆形手势,曾风行欧美,表示 “好”“行”的意思,也表示“零” 13.仰手式,掌心向上,拇指自然张开,其余弯曲,这一手势包容量很大。区域不同意义有别:手部抬高表示“赞美”“欢欣”“希望”;平放是“乞求”“请施舍”;手部放低表示无可奈何,很坦诚。
基于PLC控制的机械手设计(毕业论文)第一章绪论
第一章绪论 1. 1 PLC简介 可编程控制器简称PLC(Progrsmmable Logic Controller, PLC),它是以微处理器为基础服务夫人通用工业控制装置。国际电工委员会(IEC)在1985年的PLC标准草案第3稿中,对PLC作了如下定义:“可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。它采用可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计算和算术运算等操作的指令,并通过数字式、模拟式的输出和输入,控制各种类型的机械或生产过程。可编程控制器及其有关设备,都应按易于工业控制系统形成一个整体,易于扩充其功能的原则设计。”可编程控制器是一种通用的工业控制计算机。它的程序是可以控制不同的对象。具有更大的灵活性,再加上体积小、工作可靠性高、抗干扰能力强、控制功能完善,适应性强,安装接线简单等众多优点,它可以方便地应用在各种场合,PLC釆用了典型的计算机结构,主要是山微处理器(CPU)、存储器(RAM/R0M)、输入输出接口(I/O)电路、通信接口及电源组成。 中央处理单元(CPU)是可编程逻辑控制器的控制中枢。它按照可编程逻辑控制器系统程序赋予的功能接收并存储从编程器键入的用户程序和数据;检查电源、存储器、I/O以及警戒定时器的状态,并能诊断用户程序中的语法错误。当可编程逻辑控制器投入运行时,首先它以扫描的方式接收现场各输入装置的状态和数据,并分别存入I/O映象区,然后从用户程序存储器中逐条读取用户程序,经过命令解释后按指令的规定执行逻辑或算数运算的结果送入I/O映象区或数据寄存器内。等所有的用户程序执行完毕之后,最后将I/O 映象区的各输出状态或输出寄存器内的数据传送到相应的输出装置,如此循环运行,直到停止运行。 PLC的主要特点,可靠性高、抗干扰能力强功能完善、应用领域广编程简单,易学易用系统安装简单、体积小、价格低可编程控制器的应用领域PLC在钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业的应用也越来越广泛,主要有以下儿个方面的控制,开关量的逻辑、控制模拟量控制、运动控制过程控制、数据处理通信及联网。PLC通信含PLC间的通信及PLC与其他智能设备间的通信。随着现代社会计算机技术的提高,网络通讯技术的不断发展,它也将和其他的工业控制计算
演讲时的30种手势
演讲时的30种手势 演讲的手势可以说是“词汇”丰富,千变万化,没有一个固定的模式。作为一个出色的演讲者平时要认真观察生活,刻苦训练,积极付出实践。下面介绍演讲中常用的手势三十式。 拇指式,竖起大拇指,其余四指弯曲,表示强大,肯定,赞美,第一等意。 小指式,竖起小指,其余四指弯曲,合拢表示精细,微不足道或藐视对方,这一手势演讲中用得不多。 食指式,食指伸出,其余四指弯曲并拢,这一手势在演讲中被大量采用,用来指称人物,事物,方向,或者表示观点甚至表示肯定,胳膊向上伸直,食指向空中则表示强调,也可以表示数字“一”“十”“百”“千”“万”……演讲中右手比左手使用的频率大,手指不要太直,因为面对听众手指太直,针对性太强。 食指弯曲或钩形表示9、90、……齐肩划线表示直线,在空中划弧线表示弧形、 食指,中指,并用式,食指、中指分开伸直,其余三指弯曲,这一手势在一些欧美国际与非洲国家表示省略的意思,由前英国首相丘吉尔在演讲中大量推广。我们在演讲中运用时一般表示21、20、200…… 中指,无名指,小指三指并用式,表示3、30、300…… 食指,中指,无名指,小指四指并用式。表示4、40、400…… 五指并用式。如果是五指平伸且分开,表示5、50、500……如果指尖向上并拢,掌心向外推出,有向前,希望等意思,显示出坚定于力量,又叫手推式。 母子,小指并用式。拇指与小指同事伸出,其余三指并拢弯曲,表示6、60、600……
拇指食指并用式。拇指,食指分开伸出,其余三指弯曲表示8、80、800……如果并拢表示肯定,赞赏之意,如果二者弯曲靠拢但未接触,则表示“微 小”“精细”之意。 拇指,食指,中指并用式,三指相捏向前表示“这”“这些”。用力点表示强调,也表示数字7、70、700…… o型手势,又叫圆形手势,曾风行欧美,表示“好”“行”的意思,也表示“零” 仰手式,掌心向上,拇指自然张开,其余弯曲,这一手势包容量很大。区域不同意义有别:手部抬高表示“赞美”“欢欣”“希望”;平放是“乞 求”“请施舍”;手部放低表示无可奈何,很坦诚。 俯手式。掌心向下,其余状态同仰手式。这是审慎的提醒手势,演讲者有必要抑制听众的情绪,进而达到控场的目的,同时表示表示反对、否定之意;有时表示安慰、许可之意;有时又用以指示方向。 手切式。手剪式的一种变式。五指并拢,手掌挺直,像一把斧子用力皮下,表示果断,坚决、排除之意。 手啄式。五指并拢相夹相触。,指尖向上,就像一个收紧了开口的钱包,用于强调主题和重点,也表示探讨之意。 手剪式。五指并拢,手掌挺直,掌心向下,左右两手同时运用,随着有声语言左右分开,表示强烈拒绝。 手抓式。五指稍弯,分开、开口向上。这种手势主要用来吸引听众,控制大厅气氛。 手压式,手臂自然伸直,掌心向下,手掌一下一下向下压去。当听众情绪激动时,可用这手势平息。 手推式,见“五指并用式”
基于PLC的工业机械手控制系统设计
基于PLC的工业机械手控制系统设计 摘要 机械手是工业自动化领域中经常遇到的一种控制对象。近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。机械手广泛地应用与锻压、冲压、锻造、焊接、装配、搬运、喷漆、热处理等各个行业。特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段。 本设计描述了基于PLC的机械手控制系统设计,重点介绍了机械手控制系统中的硬件选择方法,软件的设计过程,以及PLC控制装置的工作过程。 本设计实现了机械手在搬运装配线上,通过S7-200PLC控制机械手完成从A传送带搬运物件至B传送带中,然后进入下一个工作流程。机械手的上升/下降和左转/右转的执行,分别由双线圈二位电磁阀控制气缸的运动实现;夹紧/放松则是由单线圈的二位电磁阀控制气缸的运动来实现。 【关键词】机械手;PLC;电磁阀
Based on plc industrial manipulator control system design Abstract In the field of industrial automation manipulator is often met in a control object. In recent years, with the development of industrial automation manipulator gradually become a new subject, and with the rapid development. Manipulator widely application and forging, stamping, forging, welding, assembling, handling, spray paint, heat treatment, etc. Especially in heavy, high temperature, toxic and dangerous, radioactive, dust and so on bad work environment, manipulator because of its significant advantages by pay special attention to. In a word, the manipulator is to improve the labor productivity, improve working conditions, reduce labor intensity and realize industrial production automation is an important means. This design based on PLC describes the manipulator control system design, introduced the manipulator control system, the hardware selection method, the software design process, and the working process of the PLC control device. The design and implementation of the manipulator in the handling assembly line, manipulator controlled by the S7-200PLC complete conveyor belt carrying objects from A to B conveyor, and then go to the next workflow. The implementation of the up / down and left / right of the manipulator, respectively, to achieve control movement of the cylinder by a double coil solenoid valve; clamp / unclamp cylinder is controlled by a single coil solenoid valve movement. 【Key Words】Manipulator;PLC;solenoid valve
演讲手势:演讲手势的规范技巧
演讲手势:演讲手势的规范技巧 在演讲中使用最多、动作最大的要算手势了。它可以随着内容的需要向上、下、左、右、前、侧各个方向挥动。手势可单手,可双手。这些都没有机械的规定。以下是小编整理的关于演讲手势的规范技巧,欢迎大家参阅。 6种基本演讲手势技巧: 1、切菜 将右手掌放于胸前,大拇指与食指之间角度大约为60-75度。然后向前切出,切出幅度分为三个幅度,小、中、大(左手同理)。 将手掌置于胸前是单手势练习的标准式,待您熟悉后可以自然运用,不用每个手势都把手置于胸前。 2、拍菜 将右手掌放于胸前,大拇指与食指之间角度大约为60-75度。然后手掌从胸前向前拍出。幅度分为小、中、大三个幅度。 3、扔菜
将右手掌放于胸前,大拇指与食指之间角度大约为60-75度。然后手掌从胸前向右划弧。幅度分为小、中、大三个幅度。 4、上菜 将右手掌放于胸前,大拇指与食指之间角度大约为60-75度。然后手掌从胸前向前翻出,掌心向上,掌背向下。幅度分为小、中、大三个幅度。 5、点菜 将右手握拳放胸前。然后向前伸出手臂,同时伸出食指。幅度分为小、中、大三个幅度。 6、锤菜 将右手握拳放于胸前。然后向前伸出手臂。幅度分为小、中、大三个幅度。 巧用手势增添演讲气势 第一,上中下三区的运用。 上区,就是手势在肩以上,表示积极向上,一般用在号召鼓动、赞美、表扬的时候。 下区,就是手势在腰以下,表示消极的、不好的,一般用在批评指责的时候。
中区,就是手势在肩与腰之间,表示一般的描述表达。 一般演讲过程中,大部分手势都在中区。 第二,场面大,手势大;场面小,手势小。 当会场大、人数多的时候,我们的手势做得要大气,要做出来让听众都能看见。 当会场小、人数少的时候,我们的手势做得要小一些,做太大了,反而会让听众感觉有点张牙舞爪,和现场不协调。 在这里还要分年龄,在对年龄大的人演讲时,手势要尽量小一些;相反在对年龄小的人演讲,手势要尽量大一些。 另外还有男女之分,对于男士,手势可以大气一些,对于女士,手势可以做小一些。 第三,肩发力,表示力量;肘发力,表示亲切。 第四,手势应该停留足够长的时间。 手势一做出去,马上就收回来,则会使听众对你立刻失去信赖感。 如歌星在现场唱歌时,他的手势会指着一群人好长时间才放下来,然后再去调动另外一群人的情绪。 第五,自己的思维“仓库”里要存储3到5个手势。
基于plc的机械手控制系统设计(毕业设计)
Xinyu University 毕业设计(论文) 基于PLC的机械手控制系统设计 学生姓名:何友良 学号:1201231016 专业:电气工程及其自动化 指导教师:谢富珍副教授 学院:电气与电子工程 江西·新余
独创性声明 本人郑重声明: 所呈交的毕业设计(论文)是本人在指导教师指导下进行的研究工作及取得的研究成果。其中除加以标注和致谢的地方,以及法律规定允许的之外,不包含其他人已经发表或撰写完成并以某种方式公开过的研究成果,也不包含为获得其他教育机构的学位或证书而作的材料。其他同志对本研究所做的任何贡献均已在文中作了明确的说明并表示谢意。 本毕业设计(论文)成果是本人在新余学院期间在指导教师指导下取得的,成果归新余学院所有。 特此声明。 作者签名(手写):签名日期:年月日 版权使用授权书 本毕业设计(论文)作者及指导教师完全了解新余学院有关保留、使用毕业设计(论文)的规定,有权保留并向国家有关部门或机构送交毕业设计(论文)的复印件和磁盘,允许毕业设计(论文)被查阅和借阅。 作者签名(手写):指导教师签名(手写): 日期:年月日日期:年月日
摘要 论文题目:基于PLC的机械手控制系统设计 专业:电气工程及其自动化 学生姓名:何友良 指导教师:谢富珍副教授 摘要 随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。工人工作环境和工作内容也要求理想化简单化,对于一些往复的工作由机械手远程控制或自动完成显得非常重要。这样可以避免一些人不能接触的物质对人体造成伤害,如冶金、化工、医药、航空航天等。 在机械制造业中,机械手应用较多,发展较快。目前主要应用于机床、模锻压力机的上下料以及焊接、喷漆等作业,它可以按照事先制定的作业程序完成规定的操作,有些还具备有传感反馈能力,能应付外界的变化。应用机械手,有利于提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的步伐。 本文主要论述了基于PLC设计的机械手控制系统。首先,对可能用到的可编程控制器进行了相关的介绍,再选择设计所用到的PLC型号。然后,通过对机械手的控制方式及各功能的实现方式进行研究,确定各功能的实现方案和设计控制系统所用到的器材。最后,对PLC控制系统的软件程序和硬件结构进行设计。 关键词:工业自动化;可编程控制器;机械手;远程控制;传感反馈
PLC机械手基本控制设计
1.0引言?本文以某物流控制中的机械手控制为例,分析了PLC与步进驱动装置的控制方法,本系统涉及的主要硬件是S7-200 PLC和SH-2H057步进驱动器。 (1)S7-200 PLC系列是西门子公司的可编程控制器,这一系列产品可以满足多种多样的自动化控制要求,由于具有紧凑的设计、良好的扩展性、低廉的价格以及强大的指令,使得S7-200 PLC可以满足小规模的控制要求。此外,丰富的CPU类型和电压等级使其在解决用户的工业自动化问题时,具有很强的是适用性。 1台S7-200 PLC包括一个单独的S7-200CPU,或者带有各种各样的可选扩展模块。S7-200 CPU模块包括一个中央处理单元(CPU)、电源以及数字量I/O点,这些都被集成在一个紧凑、独立的设备中。 l CPU负责执行程序和存储数据,以便对工业自动化控制任务或过程进行控制; l 输入和输出是系统的控制点:输入部分从现场设备中采集信号,输出部分则控制泵、电机、以及控也过程中的其他设备; l 电源向CPU 及其所连接的任何设备提供电力; l通讯端口允许将S7-200 CPU同编程器或其他一些设备连起来;?l 状态信号灯显示了CPU 的工作模式(运行或停止),本机I/O的当前状态,以及检查出来的系统错误;?l通过扩展模块可提供其通讯性能; l通过扩展模块可增加CPU的I/O点数(CPU 221不扩展);?l 一些CPU有内置的实时时钟,或添加实时时钟卡;?lEEPROM卡可以存储CPU程序,也可以将一个CPU中的程序送到另一个CPU中; 2)SH l 通过可选的插入式电池盒可延长RAM中的数据存储时间;?l最大I/O配置。?( -2H057驱动器输入信号共有三路,他们是:步进脉冲信号CP、方向电平信号DIR、脱机电平信号FREE.他们在驱动器内部分别通过270Ω的限流电阻接入光耦的负输入端,且电
演讲手势技巧视频教程
演讲手势技巧视频教程 篇一:演讲中常用的演讲手势(图) 手是人体的表情器官之一。手势是使用频率最高的体态语言形式。由于双手活动幅度较大,活动最方便、最灵巧,形态变化也最多,因而手势的表现力、吸引力和感染力也最强,最能表达出丰富多彩的思想感情。寓意深刻、优美得体的手势,能产生极大的魅力,激发听众的热情,加深听众对演讲内容的理解,使演讲获得成功。 演讲中,自然而安稳的手势,可以帮助演讲者平静地说明问题;急剧而有力的手势,可以帮助演讲者升华感情;稳妥而含蓄的手势,可以帮助演讲者表明心迹。演讲的手势分为四类: 一是指示手势。这种手势是用来指示具体真实形象,又可分为实指和虚指两大类。实指是指演讲者手势确指在场的人或事或方向,且均在听众的视线内。如“我”或“你们”、“这边”或“上面”、“这些”或“这一个”等。虚指是指演讲者和听众不能看到的。比如“在很久很久以前”、“在遥远的地方”。常用虚指可伴“他的”、“那时”、“后面”等词。指示手势比较明了,不带感情色彩,比较容易做。 二是模拟手势。用手势描述形状物,其特点是“求神似,不求形似”。比如用双手合抱,把梨子虚拟成一个大球形,表达出人们的真情实意。模拟手势信息含量大,升华了感情,
有一定的夸张色彩。 三是抒情手势。此手势在演讲中运用频率最多。比如:兴奋时拍手称快;恼怒时挥舞拳头;急躁时双手相搓;果断时猛力砍下。抒情手势是一种抽象感情很强的手势。 四是习惯手势。任何一位演讲者都有一些只有他自己才有而别人没有的习惯性手势,且手势的含义不明确不固定,随着演讲内容的不同而体现不同的含义。演讲手势贵在自然,切忌做作;贵在协调,切忌脱接;贵在精简,切忌泛滥;贵在变化,切忌死板;贵在通盘考虑,切忌前紧后松或前松后紧。 下面介绍几种常用且通用的演讲手势 大仰手式,掌心向上,拇指自然张开,手部抬高,表示“赞美”、“欢欣”、 望”之意,一般用在情绪高昂和抒情的时候。 小仰手式,掌心向上,拇指自然张开,其余弯曲,表示包容量很大。 “希 伸手式,手心向上,前臂略直,手掌向前平伸,表示请求、交流、许诺、谦逊、 承认、赞美、希望、欢迎、诚实等意思。 举手,五指朝天,前臂垂直,手掌举至头部,表示行动、肯定、激昂、动情、歌
基于PLC的机械手控制系统设计
基于PLC机械手控制系统设计 摘要:工业机械手是近几十年发展起来的一种高科技自动生产设备。工业机械手也是工业机器人的一个重要分支。他的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性。机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。 机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。 一、机械手简介 工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。 机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。 1、机械手分类 机械手一般分为三类。第一类是不需要人工操作的通用机械手,它是一种独立的不附属于某一主机的装置。它可以根据任务的需要编制程序,以完成各项规定工作。它的特点是除具备普通机械的物理性能外,还具备通用机械、记忆智能的三元机械。第二类是需要人工操作的,称为操作机。它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电信号操作机械手来进行探测月球、火星等。第三类是专用机械手,主要附属于自动机床或自动线上,用于解决机床上下料和工件传送。这种机械手在国外称为“Mechanical Hand”,它是为主机服务的,由主机驱动,除少数外,工作程序一般是固定的,因此是专用的。 本项目要求设计的机械手模型可归为第一类,即通用机械手。在现代生产企业中,自动化程度较高,大量应用机械手。通过本次设计,可以增强对工业机械手的认识,同时并熟悉掌握PLC技术、位置控制技术、气动技术等工业控制常用的技术。 2、机械手控制系统设计步骤 根据工艺要求确定被控系统必须完成的动作,确定这些动作之间的关系及完成这些动作的顺序。(2)分配输入、输出设备,即确定哪些外围设备是送信号给PLC的,哪些外围设备是接收来自PLC的信号的,同时还要将PLC的输入、输出点与之一一对应,对I/O进行分配。在此基础上确定PLC的选型。(3)根据控制系统的控制要求和所选PLC的I/O点的情况及高功能模块的情况,设计PLC用户程序,此时可采用梯形田、助记符或流程图语言形式的用户程序。PLC的用户程序体现
演讲的手势技巧分类及规则
演讲的手势技巧分类及规则 演讲的手势分类 一是指示手势。这种手势是用来指示具体真实形象,又可分为实指和虚指两大类。实指是指演讲者手势确指在场的人或事或方向,且均在听众的视线内。如“我”或“你们”、 “这边”或“上面”、“这些”或“这一个”等。虚指是指演讲者和听众不能看到的。比如“在很久很久以前”、“在遥远的地方”。常用虚指可伴“他的”、“那时”、“后面” 等词。指示手势比较明了,不带感情色彩,比较容易做。 二是模拟手势。用手势描述形状物,其特点是“求神似,不求形似”。比如用双手合抱,把梨子虚拟成一个大球形,表达出人们的真情实意。模拟手势信息含量大,升华了感情,有一定的夸张色彩。 XX 三是抒情手势。此手势在演讲中运用频率最多。比如: 兴奋时拍手称快;恼怒时挥舞拳头;急躁时双手相搓;果断时猛力砍下。抒情手势是一种抽象感情很强的手势。 四是习惯手势。任何一位演讲者都有一些只有他自己才有而别人没有的习惯性手势,且手势的含义不明确不固定,随着演讲
内容的不同而体现不同的含义。 演讲手势贵在自然,切忌做作;贵在协调,切忌脱接;贵在 精简,切忌泛滥;贵在变化,切忌死板;贵在通盘考虑,切忌前紧后松或前松后紧。 演讲的手势可以说是“词汇”丰富,千变万化,没有一个固定的模式,作为一个出色的演讲者平时要认真观察生活,刻苦训练,积极付诸实践。 XX 下面介绍演讲中常用的手势。 拇指、小指并用式。拇指与小指同时伸出,其余三指并拢弯曲,表示六、六十、六百。 拇指、食指、中指并用式。三指相捏向前表示“这”、 “这些”,用力一点表示强调,也表示数字七、七十、七百……。 拇指、食指并用式。并拢表示肯定、赞赏之意;二者弯曲靠拢但未接触,则表示“微小”、“精细”之意;分开伸出,其余拇指式。竖起大拇指,其余四指弯曲,表示强大、肯定、赞美、第一等意; 小指式。竖起小指,其余四指弯曲合拢,表示精细、微不足道或蔑视对方。这一手势演讲中用得不多。 食指式。食指伸出,其余四指弯曲并拢,这一手势在演讲中被大量米用,用来指称人物、事物、方向,或者表示观点甚至表
机械手的PLC控制设计及调试
目录 摘要 (2) ABSTRACET (3) 引言 (5) 1 PLC的发展历程和构成 (7) 1.1 PLC的发展史 (7) 1.2 PLC的构成 (8) 1.3 CPU的构成 (8) 1.4 I.O模块 (8) 1.5 电源模块 (9) 1.6 底版和机架 (9) 1.7 PLC系统的其他设备 (9) 2 机械手的组成 (10) 2.1 机械手的发展 (10) 2.2 动力臂的机械构造 (10) 2.3 控制和动力臂的机械构造 (11) 2.4 位置控制系统 (11) 2.5 负载反传系统 (11) 3 机械手PLC的发展历程和构成 (12) 3.1 根据工艺过程分析控制要求 (12) 3.2 确定所需的用户输入/输出设备及I/O点数 (15) 3.3 PLC的选择 (18) 3.4 分配PLCI/O点的编号(定义号) (18) 3.5 PLC程序设计 (18) 4 英文资料 (30) 个人小结 (35) 参考文献 (46)
机械手的PLC控制设计及调试 摘要 机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。 机械手主要由手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。 机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。 机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手 关键词:点控制机械手连续控制机械手可编程控制技术
- 基于PLC的机械手控制系统设计毕业设计
- 机械手plc控制系统
- 基于PLC机械手控制系统设计
- plc机械手控制系统文献综述
- 基于PLC机械手控制系统设计
- PLC机械手控制系统文献综述(包括外文翻译)
- 基于plc的机械手控制系统设计(毕业设计)
- 机械手PLC控制系统说课
- 搬运机械手PLC控制系统设计
- 气动机械手的PLC控制系统的设计
- 机械手PLC控制系统的组态王仿真模拟
- 基于PLC控制的机械手系统控制毕业设计论文开题报告
- 机械手的PLC控制(完整)
- PLC实训报告 机械手PLC控制系统
- 基于PLC的机械手控制系统设计(DOC)
- 基于PLC的工业机械手控制系统设计
- PLC机械手控制系统文献综述(包括外文翻译)复习过程
- 简易机械手PLC控制系统设计
- PLC控制机械手分拣系统
- 基于西门子S7_200PLC控制的机械手项目技术报告