提高基于Profibus网络控制的门机变频调速系统的可靠性

提高基于Pr ofibus 网络控制的门机变频调速系统的可靠性
秦皇岛港股份有限公司杂货分公司 赵庆斌
1 提高门机变频器通讯网络的可靠性
门机自动化系统中所使用的P LC,有的是集中安装在控制柜内,有的是分散安装在生产现场的各单机上,P LC 的控制信号通过Pr ofibus 网络传送到各变频器,如果环境恶劣,如强腐蚀、高粉尘、剧烈的冲击和振动,将不能保证通讯网络信号的正常传送,因此,研究Pr ofibus 网络的稳定性具有十分重要的意义。1.1 变频器通讯网络架构
Pr ofibus 现场总线既适用于自动化系统与现场信号单元的通讯,也可用于可以直接连接带有接口的变送器、执行器、传动装置和其他现场仪表及设备,对现场信号进行采集和监控。
Pr ofibus 网络器件的组成见图1(以GE 系列P LC 和安川变频器为例)
。
图1 Prof i bus 网络的构成
通信终端变频器SI -P 卡与P LC 通信模块I C693上的终端相连。通讯线承担着检测信号和控
制信号的传输任务,信号传输的质量直接影响到整个控制系统的准确性、稳定性和可靠性,因此做好通讯线的抗干扰是十分必要的。1.2 提高通讯网络的可靠性根据故障现象分析,通讯线上的共模干扰一般是由于被测信号的接地端与控制系统的接地端存在一定的电位差所致,这种干扰在两条信号线上的周期、幅值基本相等。对共模干扰的抑制方法是把通讯线绞合,由于改变了导线电磁感应的方向,所以其
感应互相抵消[1]
。
为了抑制干扰,还将输入线路尽量缩短,并将通讯线与动力线分开布线,把通讯线放在有屏蔽的金属管内。
接地是提高电子设备电磁兼容性(E MC )的有效手段之一。正确的接地,既能抑制电磁干扰的影
响,又能抑制设备向外发出干扰;而错误的接地,会引入严重的干扰信号,使P LC 系统无法正常工作。例如:电缆屏蔽层必须一点接地,如果电缆屏蔽层两端都接地,就存在地电位差,有电流流过屏蔽层,当发生异常状态如雷击时,地线电流会很大。此外,屏蔽层、接地线和大地有可能构成闭合环路,在变化磁场的作用下,屏蔽层内也会出现感应电流,通过屏蔽层与芯线之间的耦合干扰信号回路。我们先后对起升机构、变幅机构、回转机构和行走机构的接地端进行检查和改造,保证接地效果,避免屏蔽层、接地线和大地可能构成闭合环路,提高了通讯质量。
2 提高门机变频器调速系统的可靠性
2.1 门机变频器保护装置的改进2.1.1 加装欠压保护装置
G5变频器内部变压器为老式变压器,在电网电
压不稳定,特别是电压低时容易烧损变压器和内部接触器,更换变压器、接触器费用较高,空间紧凑也造成更换不便,并且门机故障停机时间长。
针对此情况,我们认真研究G5变频器的内部结构,通过对比,发现G7变频器内部变压器为开关电源,性能比老式变压器优良。若将G5变频器内部变压器改造成开关电源,成本较高,且内部空间较小,改造难度大。从改造成本、操作性等方面考虑,我们决定为G5变频器加装欠压保护器。该欠压保护器加装在变频器外部,以便于安装维修,当电网电压不稳定或供电电缆故障造成欠压时,能及时切断变频器电源,保护G5变频器内部的部件不受损,见图2。
改造后G5变频器运行正常。2.1.2 充电接触器的维修与改进在维修一些通讯故障的变频器后,我们发现大功率变频器里面的充电接触器与这类故障有很大关系,当变频器显示通讯故障或经常误报警时,通常的解决办法是把变频器的参数恢复到出厂值,但运行
5
3港口装卸 2010年第2期(总第190期)
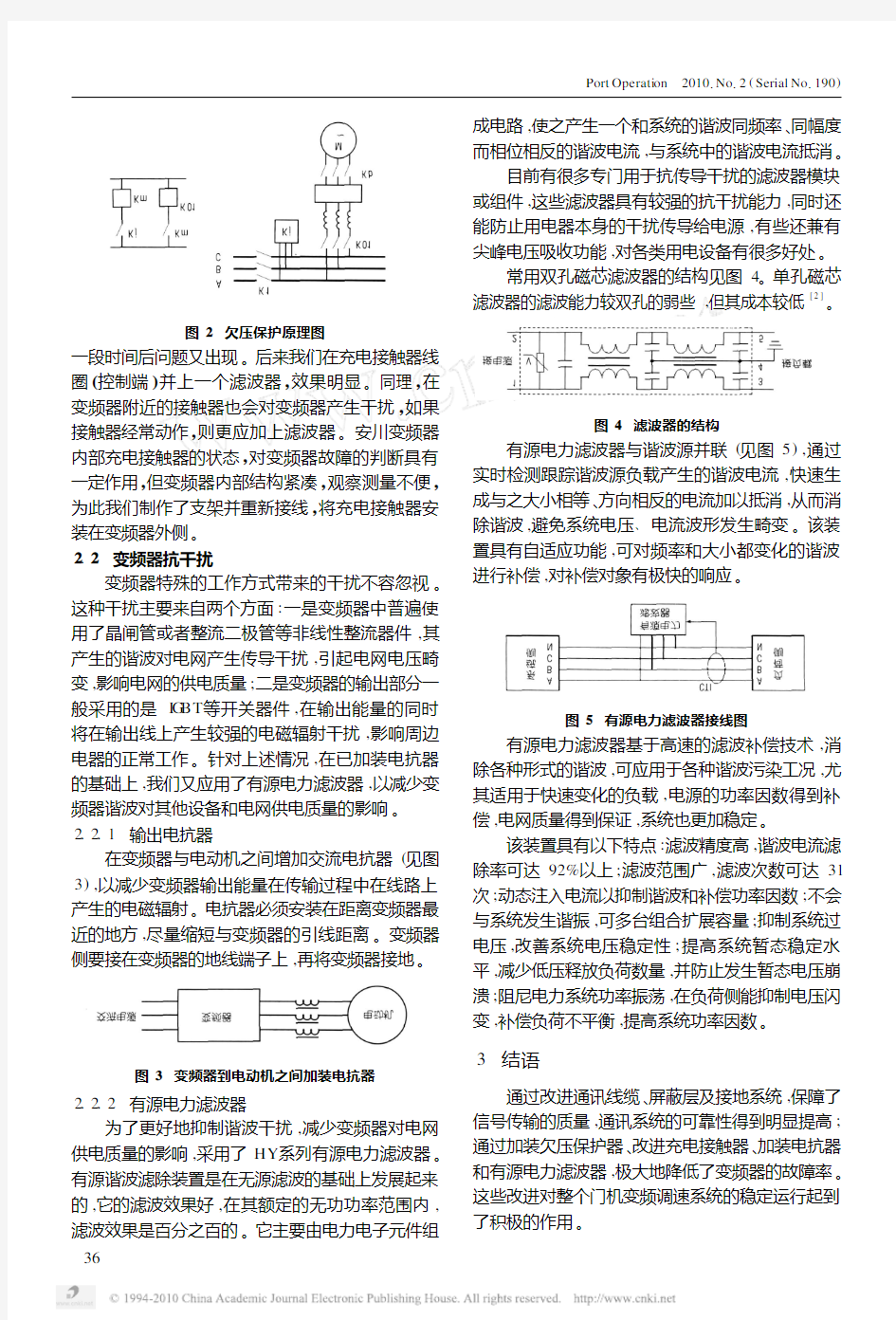
图2 欠压保护原理图
一段时间后问题又出现。后来我们在充电接触器线圈(控制端)并上一个滤波器,效果明显。同理,在
变频器附近的接触器也会对变频器产生干扰,如果接触器经常动作,则更应加上滤波器。安川变频器内部充电接触器的状态,对变频器故障的判断具有一定作用,但变频器内部结构紧凑,观察测量不便,为此我们制作了支架并重新接线,将充电接触器安装在变频器外侧。2.2 变频器抗干扰
变频器特殊的工作方式带来的干扰不容忽视。这种干扰主要来自两个方面:一是变频器中普遍使用了晶闸管或者整流二极管等非线性整流器件,其产生的谐波对电网产生传导干扰,引起电网电压畸变,影响电网的供电质量;二是变频器的输出部分一般采用的是I G BT 等开关器件,在输出能量的同时将在输出线上产生较强的电磁辐射干扰,影响周边电器的正常工作。针对上述情况,在已加装电抗器的基础上,我们又应用了有源电力滤波器,以减少变频器谐波对其他设备和电网供电质量的影响。2.2.1 输出电抗器
在变频器与电动机之间增加交流电抗器(见图3),以减少变频器输出能量在传输过程中在线路上产生的电磁辐射。电抗器必须安装在距离变频器最近的地方,尽量缩短与变频器的引线距离。变频器侧要接在变频器的地线端子上,再将变频器接地
。
图3 变频器到电动机之间加装电抗器
2.2.2 有源电力滤波器
为了更好地抑制谐波干扰,减少变频器对电网供电质量的影响,采用了HY 系列有源电力滤波器。有源谐波滤除装置是在无源滤波的基础上发展起来的,它的滤波效果好,在其额定的无功功率范围内,滤波效果是百分之百的。它主要由电力电子元件组成电路,使之产生一个和系统的谐波同频率、同幅度而相位相反的谐波电流,与系统中的谐波电流抵消。
目前有很多专门用于抗传导干扰的滤波器模块或组件,这些滤波器具有较强的抗干扰能力,同时还能防止用电器本身的干扰传导给电源,有些还兼有尖峰电压吸收功能,对各类用电设备有很多好处。
常用双孔磁芯滤波器的结构见图4。单孔磁芯
滤波器的滤波能力较双孔的弱些,但其成本较低[2]
。
图4 滤波器的结构
有源电力滤波器与谐波源并联(见图5),通过
实时检测跟踪谐波源负载产生的谐波电流,快速生成与之大小相等、方向相反的电流加以抵消,从而消除谐波,避免系统电压﹑电流波形发生畸变
。该装置具有自适应功能,可对频率和大小都变化的谐波进行补偿,对补偿对象有极快的响应。
图5 有源电力滤波器接线图
有源电力滤波器基于高速的滤波补偿技术,消
除各种形式的谐波,可应用于各种谐波污染工况,尤其适用于快速变化的负载,电源的功率因数得到补偿,电网质量得到保证,系统也更加稳定。
该装置具有以下特点:滤波精度高,谐波电流滤除率可达92%以上;滤波范围广,滤波次数可达31次;动态注入电流以抑制谐波和补偿功率因数;不会与系统发生谐振,可多台组合扩展容量;抑制系统过电压,改善系统电压稳定性;提高系统暂态稳定水平,减少低压释放负荷数量,并防止发生暂态电压崩溃;阻尼电力系统功率振荡,在负荷侧能抑制电压闪变,补偿负荷不平衡,提高系统功率因数。
3 结语
通过改进通讯线缆、屏蔽层及接地系统,保障了
信号传输的质量,通讯系统的可靠性得到明显提高;通过加装欠压保护器、改进充电接触器、加装电抗器和有源电力滤波器,极大地降低了变频器的故障率。这些改进对整个门机变频调速系统的稳定运行起到了积极的作用。
6
3Port Operati on 20101No 12(Serial No 1190)
参考文献
[1] 张选正,史步海.变频器故障诊断与维修[M].北京:
电子工业出版社,2008.
[2] 姜齐荣,赵东元,陈建业.有源电力滤波器:结构?原
理?控制[M].北京:科学出版社,2005.
赵庆斌:066002,河北省秦皇岛市海港区友谊路南立交桥下四号门 收稿日期:2009-11-09
DO I:10.3963/j.issn:1000-8969.2010.02.019
P LC控制系统中外围电路的现场维护神华黄骅港务公司装船一部 宋桂江
根据我港有关资料统计,在P LC控制系统中,系统故障的95%发生在P LC外部,而P LC内部故障90%发生在I/O模板中,即99.5%的系统故障发生在P LC的外围电路及I/O模板中。我港一期工程的2号取料机P LC控制系统运行一段时间后,发现P LC的RS-485通讯口不能正常传输数据,更换P LC系统2个月后又出现同样的故障。查找原因时发现,计算机外壳有30~60V的交流电压,计算机未接地。此电压经过PP I电缆和RS-485通讯口到地,形成电流回路,将通讯口烧坏。我们采取将计算机可靠接地和用光电隔离型的PP I电缆替代原电缆两项措施排除了故障。
由此可见,在P LC系统设计和维护中,应重点注意外围电路。下面从6个方面探讨外围电路设计及维护中应注意的事项。
1 电源
稳定可靠的电源是整个系统可靠运行的基础。电网的冲击、频率的波动将直接影响实时控制的精度和可靠性,有时会对系统造成毁灭性的破坏。在市电质量不高的场所,大电机、电焊机、变频器、中高频加热设备等大功率设备会对电网产生冲击或干扰,P LC系统电源应采用隔离变压器、交流稳压器或UPS电源等。P LC输入点的电源可以用P LC本身提供的24V电源,但不能超过其负载能力,一般P LC的24V电源只有200~500mA的输出能力,设计时应计算输入点和扩展模块的功率,若超出,可另增加24V电源给输入输出供电。系统若有模拟扩展模块,应用P LC本身提供的24V电源独立为其供电。输入和输出的电源应分别安装开关和保护装置。
2 接地
P LC系统接地要求比较严格,最好有独立的专用接地系统,还要注意与P LC有关的其他设备也要可靠接地。多个电路接地点连接在一起时,会产生意想不到的电流,导致逻辑错误或损坏电路。产生不同的接地电势的原因,通常是由于接地点在物理区域上被分隔的太远,当相距很远的设备被通信电缆或传感器连接在一起时,电缆线和地之间的电流会流经整个电路,即使在很短的距离内,大型设备的负载电流也可以在其与地电势之间产生变化,或者通过电磁作用直接产生不可预知的电流。在不正确的接地点与电源之间的电路中有可能产生毁灭性的电流,以至于破坏设备。P LC系统一般选用一点接地方式,见图1。模拟回路的接地十分重要,为了提高抗共模干扰能力,对于模拟信号可以采用屏蔽浮地技术,即信号电缆的屏蔽层一点接地,信号回路浮空,与大地绝缘电阻应不小于50MΩ
。
a)专用接地(最好)(b)公用接地(可以)(c)借用接地(不可)
图1 接地方式
3 抗干扰处理
工业现场的环境比较恶劣,存在着许多高低频干扰。这些干扰一般是通过与现场设备相连的电缆引入P LC的。除了接地措施外,在电缆的设计选择和敷设施工中,应注意采取一些抗干扰措施:
(1)模拟量信号属于小信号,极易受到外界干扰的影响,应选用双层屏蔽电缆。
(2)高速脉冲信号(如脉冲传感器、计数码盘等)应选用屏蔽电缆,既防止外来的干扰,又防止高速脉冲信号对低电平信号的干扰。
73
港口装卸 2010年第2期(总第190期)
网络系统可靠性研究现状与展望资料
网络系统可靠性研究 现状与展望 姓名:杨玉 学校:潍坊学院 院系:数学与信息科学学院 学号:10051140234 指导老师:蔡建生 专业:数学与应用数学 班级:2010级二班
一、摘要 伴随着人类社会的网络化进程,人类赖以生存的网络系统规模越来越庞大、结构越来越复杂,这导致网络系统可靠性问题越来越严峻。本文首先探讨了网络系统可靠性的发展历程、概念与特点,进而从度量参数、建模、分析、优化四个方面系统综述了网络系统可靠性的研究现状,最后对网络系统可靠性研究未来的发展进行了展望。 二、关键词:可靠性;网络系统;综述;现状;展望 三、引言 21 世纪以来,以信息技术的飞速发展为基础,人类社会加快了网络化进程。交通网络、通信网络、电力网络、物流网络……可以说,“我们被网络包围着”,几乎所有的复杂系统都可以抽象成网络模型,这些网络往往有着大量的节点,节点之间有着复杂的连接关系。自从小世界效应[1]和无标度特性[2]发现以来,复杂网络的研究在过去10 年得到了迅速发展,其研究者来自图论、统计物理、计算机、管理学、社会学以及生物学等各个不同领域,仅发表在《Nature》和《Science》上的相关论文就达百篇。对复杂网络系统结构、功能、动力学行为的深入探索、科学理解以及可能的应用,已成为多个学科领域共同关注的前沿热点[3-14]。 随着复杂网络研究的兴起,作为复杂网络最重要的研究问题之一,网络系统可靠性研究的重大理论意义和应用价值也日益凸显出来[15, 16]。人们开始关注:这些复杂的网络系统到底有多可靠?2003 年8 月美加大停电事故导致美国的8 个州和加拿大的2 个省发生大规模停电,约5000 万居民受到影响,损失负荷量61800MW,经济损失约300 亿美元;2005 年12 月台湾海峡地震造成多条国际海底通信光缆发生中断,导致整个亚太地区的互联网服务几近瘫痪,中国大陆至台湾地区、美国、欧洲等方向国际港澳台通信线路受此影响亦大量中断;2008 年1 月,南方冰雪灾害导致我国十余个省市交通瘫痪、电力中断、供水停止、燃料告急、食物紧张……这些我们赖以生存的网络系统规模越来越庞大,结构越来越复杂,但越来越频繁发生的事故也将一系列严峻的问题摆在我们面前:一些微不足道的事故隐患是否会导致整个网络系统的崩溃?在发生严重自然灾
门机控制器调试手册
编号:YETS-0019-C 调试手册 默纳克NICE900门机控制器调试手册 (适用于匹配核奥达门电机) 沈阳博林特电梯集团股份有限公司 SHENYANG BRILLIANT ELEVATOR Co.,Ltd. 2014年10月
目录 1 前言 (2) 2 门机控制器调试 (3) 2.1电气说明 (3) 2.2操作与显示界面 (3) 2.3电机参数自调谐 (4) 2.4门宽自学习 (5) 2.5运行曲线调试 (5) 2.6参数表 (7) 2.7故障诊断及对策 (13) 存档:【资料室】电子存档:【产品管理】发送部门:【按Q/BLT 51.03文件分发部门与份数统计表】 设计 审核 产品管理 标记处数更改单编号签名日期批准
1 前言 本手册所阐述的内容仅提供给博林特电梯有限公司调试、维保人员经培训合格后使用。为了您个人及他人的安全,请勿执行您无资格执行和没有认证的工艺步骤。 本手册包括的所有图纸和信息属沈阳博林特电梯股份有限公司财产,不能任意直接或间接地传播、公开、并损坏沈阳博林特电梯股份有限公司的利益。本手册严禁以任何理由私自复印,若调试人员离开本公司,应及时将资料交还沈阳博林特电梯股份有限公司。 调试人员在调试前应仔细阅读本手册,调试过程严格按照本手册程序执行。在调试过程中应穿着电工绝缘鞋、工作服等防护衣物并应保证在每个现场至少有一套调试工具。 本手册适用于匹配核奥达YTYP504-502门电机的门机系统电气调试,适用于控制柜、曳引机、编码器在出厂时进行了配套调试工作的电梯系统。本手册需要配套《电气安装手册》使用。 电梯安全关系重大,因此要求每位调试人员工作认真仔细,决不放过任何疑点或进行危险操作!在调试过程中发现问题可以及时与电气设计室联系。
基于单片机对电梯门机控制系统的设计
电梯门机控制系统设计与分析 1.1 电梯门机控制系统运行曲线的设计 门机运行曲线的示意形状如图4-1所示。门机运行曲线按速度分区为:关门力矩保持区A0,开门低速区A1,开门加速区A2,开门高速区A3,开门减速区A4开门末段低速区A5,开门力矩保持区A6,关门低速及加速区A7,关门高速区A8,关门减速区A9,关门末段低速区A10,并且要求高速时速度过渡为光滑的S形曲线,其中高速过渡点为I2,I3,I6和I7。 图1-1 电梯门机理想运行曲线图 1.1.1 门机运行曲线的分段实现 门机正转与反转运行曲线的设计原理是一样的,以下就以电机正转开门的运行曲线设计的实现为例进行讨论。为了论述方便,现以开门减速段的实现方法说明曲线计算过程。设计开门运行曲线时,门机控制系统的速度变化采用如图4-2所示的速度与时间关系。
图1-2 门机系统加减速特性 由上述的时间速度控制可讨论系统运行的位移速度曲线。“S —门位移;t —时间;V —电机的速度;T —速度变化的时间间隔; d V —在T 内的速度变化。在速度下降的过程中,速度从0V 开始下降,则在t 时刻,0()d V t V V t =-?,又 ()ds V t dt =,则有 010112 000 00220101011(t)()21()()()2d d V V V V t V V d d d S V dt V V t dt V t V t V V V V V V V --==-=-=-=+-?? (4-1) 在一个速度变化时间T 内,01d V V V -=,则 010d ()2(2)2T S V V V V =+=- (4-2) 由此可知在一个T 内,其中T 由门机的一个程序运行循环时间所确定门位移的距离与0(2)d V V -成正比,当0V 大时则门位移也大,当0V 小时则门位移也小;在 0V 相同的情况下,如果要改变速度下降的快慢,则可改变d V 的大小;同时由以上的推导可知,系统运行位移S 与电机速度V 是成二次曲线关系,则运行曲线在高速前后的加减速变化是相当平滑的,而且加减速的过程相当迅速。 图4-3 开门运行位移速度曲线 由运行的对称性可知在加速段过程,其位移速度特性与减速段过程相类似,可得开门运行曲线的特性曲线,实际设计的门机控制系统开门运行曲线如图4.3所示,门机系统的关门运行曲线与开门曲线基本成中心对称关系
基于人机工程学的矿井通风系统可靠性分析详细版
文件编号:GD/FS-4869 (解决方案范本系列) 基于人机工程学的矿井通风系统可靠性分析详细版 A Specific Measure To Solve A Certain Problem, The Process Includes Determining The Problem Object And Influence Scope, Analyzing The Problem, Cost Planning, And Finally Implementing. 编辑:_________________ 单位:_________________ 日期:_________________
基于人机工程学的矿井通风系统可 靠性分析详细版 提示语:本解决方案文件适合使用于对某一问题,或行业提出的一个解决问题的具体措施,过程包含确定问题对象和影响范围,分析问题,提出解决问题的办法和建议,成本规划和可行性分析,最后执行。,文档所展示内容即为所得,可在下载完成后直接进行编辑。 摘要:矿井通风系统是矿井生产系统的重要辅助系统,其可靠性高低对矿井生产和安全管理有着直接的影响。将人机工程学用于矿井通风系统的可靠性的研究,就是用人机系统的观点来研究矿井通风中人、机、环境3个子系统各自的特点及相关性,并给出了矿井通风“人—机—环境”系统可靠性的定义和数学模型。 关键词:人机工程学;通风系统;可靠性 矿井通风系统由通风动力及其装置、通风井巷网络、风流检测、控制系统组成。在生产时期其任务是利用各种动力,以最经济的方式,向井下各用风地点
提供足够的新鲜空气,保证工作人员的呼吸,稀释并排除瓦斯等各种有害物质,降低热害,给井下工人创造良好的工作环境;发生事故时,有效地控制风流方向和大小,与其他措施相结合,防止灾害的扩大,进而达到消灭事故的目的。人们将其实现上述任务的能力程度称为矿井通风的可靠性。 以前的研究为了简化工程求解的难度,系统的可靠性研究只考虑硬件部分的可靠性,而人和环境被认为完全可靠,即可靠度为1。对“人—机—环境”系统可靠性研究,可以弥补在工程领域可靠性研究只分析硬件可靠性而设定人员为完全可靠的不足,使可靠性的研究更加完善。事实上,系统的故障既可能是由硬件引起的,也可能是由操作人员的操作失误或者是由于环境条件所引起。因此,在分析系统的可靠性时,应该对人—机—环境三要素进行综合考虑。
我所认知的电子设备可靠性工程
我所认知的电子设备可靠性工程 04091102班04091061 石坚 摘要:说到到可靠性工程,由于这学期在学校开了个鸡排店,用到了油炸的机器,接触到了有关可靠性设计的部分。所以选了电子设备可靠性工程这门选修课,以便进一步了解机器的可靠性设计,尤其是和我们专业有关的电子设备的可靠性。可靠性是指产品在规定的条件下和规定的时间内完成规定功能的能力。任何产品不论是机械、电子,还是机电一体化产品都有一定的可靠性,产品的可靠性与实验、设计和产品的维护有着极大的关系。通过自己的亲身经历,觉得可靠性是个很重要的参数,而随着社会的进步和科学技术的发展,人们对电子设备、电子器件的可靠性更是要求越来越高。本文就电子元器件的可靠性,包括电子元器件在不同条件下的不同特征,元件失效的规律,发生故障的概率等做了简单的论述。 引言:可靠性的定义是系统或元器件在规定的条件下和规定的时间内,完成规定功能的能力。可靠性技术基于两个重要的理论基础:失效物理和概率统计,同时,它产生了两个重要的应用领域,即系统可靠性和元器件可靠性。在元器件可靠性领域又进一步可分为元器件固有可靠性和使用可靠性。前者主要研究元器件的设计和制造过程中的可靠性,后者侧重研究在电子系统研制过程中如何选好、买好、用好和管好元器件,防止、控制引入过应力而损坏可靠元器件和接收、使用可靠性不能满足要求得元器件。根据电子行业界分析,60%以上的生产故障是由于元器件失效引起的,70%以上的市场返修也是因为器件失效引起的。国内外地有关资料表明:在电子元器件的失效中,由于选择或使用不当等人为因素导致失效的比列高达失效数的50%以上。 一.提高电子产品的可靠性意义重大 提高产品的可靠性,可以防止故障和事故的发生,尤其是避免灾难性的事故发生,从而保证人民生命财产安全。1986年1月28日,美国航天飞机“挑战者”号由于1 个密封圈失效,起飞76s 后爆炸,其中7 名宇航员丧生,造成12 亿美元的经济损失;1992年,我国发射“澳星”时,由于一个小小零件的故障,使“澳星”发射失败,造成了巨大的经济损失和政治影响。
VVVF门机控制器操作说明
V V V F门机控制器操作说明 Prepared on 24 November 2020
VVVF门机控制器操作说明 VVVF门机控制器——操作说明书 注:H100版以后(包括H100版)的门机变频器、面板控制模式和端子控制模式的设定是由变频器壳体上手动/自动开关来设定,开关放到手动即为面板控制模式;开关放到自动即为端子控制模式。F11对于H100版以后的门机变频器不起作用,对于H100版以前仍然为0 —面板控制模式; 2 —端子控制模式。 1. 安装工作程序 1.1 安装注意事项 1. 1. 1 控制器设计安装于轿顶。操作及安装时应小心,尤其不能有金属、水、油或其它异物进入门机控制 1.1.2 不要将门机控制器安装于易燃材料上。 1.1.3在轿顶安装门机控制器时,一方面要保证面板能被良好的观察,另一方面要保证门机控制器的清洁。 1.1.4 在进行接线工作前,必须确保门机控制器电源至少已切断两分钟。否则会存在电击或放电危险。 1.1.5门机控制器的接线必须由有专业资格的人员来完成。
1.1.6检查安全开关电路是否断开(急停)。 1.1.7 确保所有的电气部件都正确接地。 1.1.8 确认门机控制器有正确的电源电压。 1.1.9反复确认装置接线正确。 1.2 使用注意事项 1.2.1 在布线过程中始终注意信号及控制线(弱电)与交流电源线、电机线(强电)之间保持一定距离,不要混在一起,避免造成干扰。 1.2.2 在轿厢启动前,控制系统必须给出关门指令,并且在轿厢运行过程中始终给出关门指令,避免门锁断开造成中途停车。 1.2.3 HdXX或HXXX(Hd4、H100等为软件版本号)为软件版本标志,“20. 00”—为可读入脉冲数,如遇软件版本升级,恕不再另行通知。 1.2.4 对于开关门控制信号输入必须使用无源触点,避免造成门机变频器损坏或工作不正常。 1.2.5 在使用前必须仔细阅读本说明书。 2.产品介绍 2.1 工作环境 2.1.1 使用在无尘埃、腐蚀性气体、可燃性气体、油雾、水蒸气的环境中。
PLC电梯控制系统的设计
河南工业职业技术学院 毕业设计 题目 PLC电梯控制系统的设计系院电气工程系 专业 班级 学生姓名 学号 指导教师
前言 随着电子技术的发展,当前数字电器系统的设计正朝着速度快、容量大、体积小、重量轻的方向发展。推动该潮流发展的引擎就是日趋进步和完善的PLC设计技术。目前数字系统的设计可以直接面向用户需求,根据系统的行为和功能的要求,自上而下的完成相应的描述、综合、优化、仿真与验证,直接生成器件。上述设计过程除了系统行为和功能描述以外,其余所有的设计几乎都可以用计算机来自动完成,也就说做到了电器设计自动化这样做可以大大的缩短系统的设计周期,以适应当今品种多、批量小的电子市场的需求。 电器设计自动化的关键技术之一是要求用形式化的方法来描述数字系统的硬件电路,即要用所谓的硬件语言来描述硬件电路。所谓硬件描述语言及相关的仿真、综合等技术的研究是当今电器设计自动化领域的一个重要课题。 PLC的设计和开发,已经有多种类型和款式。传统的PLC各有特点,它们适合在现场做手工测量,要完成远程测量并要对测量数据做进一步分析处理,传统PLC是无法完成的。然而基于PC 通信的PLC,既可以完成测量数据的传递,又可借助PC,做测量数据的处理。所以这种类型的PLC无论在功能和实际应用上,都具有传统PLC无法比拟的特点,这使得它的开发和应用具有良好的前景。
目录 1.前言 2.电梯控制基本概念 3.电梯控制的组成 4.电梯控制的移动 5.电梯PLC系统的模拟组态 6.货运电梯重量超载的控制 7.总结 8.参考文献
2. PLC电梯控制的基本概念 电梯控制系统可分为电力拖动系统和电气控制系统两个主要部分。电力拖动系统主要包括电梯垂直方向主拖动电路和轿箱开关电路。二者均采用易于控制的直流电动机作为拖动动力源。主拖动电路采用PWM调试方式,达到了无级调速的目的。而开关门电路上电机仅需一种速度进行运动。电气控制系统则由众多呼叫按钮、传感器、控制用继电器、指示灯、LED七段数码管和控制部分的核心器件(PLD)等组成。PLC集信号采集、信号输出及逻辑控制于一体,与电梯电力拖动系统一起实现了电梯控制的所有功能。 电梯控制系统原理框图如图1所示,主要由轿箱内指令电路、门厅呼叫电路、主拖动电机电路、开关门电路、档层显示电路、按钮记忆灯电路、楼层检测与平层检测传感器及PLC电路等组成的。 电梯控制系统的硬件结构如图2所示。包括按钮编码输入电路、楼层传感器检测电路、发光二极管记忆灯电路、PWM控制直流电机无线调速电路、轿箱开关电路、楼层显示电路及一些其他辅助电路等。为减少PLC输入输出点数,采用编码的方式将31个呼叫及指层按钮编码五位二进制码输入PLC PLC系统的其它设备 1 编程设备:编程器是PLC开发应用、监测运行、检查维护不可缺少的器件,用于编程、对系统作一些设定、监控PLC及PLC 所控制的系统的工作状况,但它不直接参与现场控制运行。小编程器PLC一般有手持型编程器,目前一般由计算机(运行编程软件)充当编程器。 2 人机界面:最简单的人机界面是指示灯和按钮,目前液晶屏(或触摸屏)式的一体式操作员终端应用越来越广泛,由计算机(运行组态软件)充当人机界面非常普及。 3 输入输出设备:用于永久性地存储用户数据,如EPROM、EEPROM写入器、条码阅读器,输入模拟量的电位器,打印机等。
电子产品可靠性测试规范
产品可靠性测试规范 1.目的 本文制定产品可靠性测试的要求和方法,确保产品符合可靠性的质量 要求。 2.范围 本文件适用本公司所有产品。 3.内容 3.1 实验顺序 除客户特殊要求外,试验样品进行试验时,一般按下表的顺序进行: 3.2实验条件 3.2.1 实验条件:
3.2.2 试验机台误差: a.温度误差:高温为+/-2℃,低温为+/-3℃. b.振动振幅误差:+/-15%. c.振动频率误差:+/-1Hz. 3.2.3 落地试验标准 3.2.3.1 落地试验应以箱体四角八边六面(任一面底部相连之四角、与此四角相连之八边, 六面为前、后、左、右、上、下这六个面)按规定高度垂直落下的方式进行。 重量高度 0~10kg以内75cm 10~20kg以内60 cm 20kg以上53 cm 3.2.3.2 注意事项: 5.2.3.2.1 箱内样品及包材在每个步骤后进行外观与功能性检验。 5.2.3.2.2 跌落表面为木板。 3.2.4 推、拉力试验方法和标准 3.2. 4.1、目的:为了评定正常生产加工下焊锡与焊盘或焊盘与基材的粘结质量。 3.2. 4.2、DIP类产品,需把元件用剪钳剪去只留下元件脚部分(要求留下部分 可以自由通过元件孔),且须把该焊盘与所连接的导线分开,然后固定 在制具上用拉力机以垂直于试样的力拉线脚(如下图),直到锡点或焊 盘拉脱为止,然后即可在拉力计上读数。 拉力方向 焊锡 焊盘
(图1) 3.2. 4.3、SMT类产品,片式元件用推力计以如下图所示方向推元件。推至元件或焊盘脱落后在推 拉力计上读数。并把结果记录在报告上。 三极管推力方向如下图所示,推至元件或焊盘脱落后在推拉力计上读数,并记录。 3.2. 4.4、压焊类产品,夹住排线(FFC或FPC)以如下图所示方向做拉力,拉至FFC或FPC 断或焊锡与焊盘脱离(锡点脱离)或焊盘与基材脱离(起铜皮),把结果记录在报告 上。 3.2. 4.5、产品元器件抽样需含盖全面规格尺寸。产品各抗推、拉力标准为;
网络可靠性设计
网络可靠性设计
目录 1.1 网络可靠性设计 (2) 1.1.1 网络解决方案可靠性的设计原则 (3) 1.1.2 网络可靠性的设计方法实例 (4) 1.1.3 网络可靠性设计总结 (9)
1.1网络可靠性设计 可靠性是指:设备在规定的条件下、在规定的时间内完成规定的功能的能力。对于网络系统的可靠性,除了耐久性外,还有容错性和可维护性方面的内容。 1)耐久性。是指设备运行的无故障性或寿命,专业名称叫MTBF(Mean Time Between Failure),即平均无故障时间,它是描述整个系统可靠性的重要指标。对于一个网络系统来说,MTBF是指整个网络的各组件(链路、节点)不间断无故障连续运行的平均时间。 2)容错性。专业名称叫MTTR(Mean Time to Repair),即系统平均恢复时间,是描述整个系统容错能力的指标。对于一个网络系统来说,MTTR是指当网络中的组件出现故障时,网络从故障状态恢复到正常状态所需的平均时间。 3)可维护性。在系统发生故障后,能够很快地定位问题并通过维护排除故障,这属于事后维护;根据系统告警提前发现问题(如CPU使用率过高,端口流量异常等),通过更换设备或调整网络结构来规避可能出现的故障,这属于预防维护。可维护性需要管理人员来实施,体现了管理的水平,也反映了系统可靠性的高低。
表示系统可靠性的公式为: MTBF / ( MTBF + MTTR ) * 100%。 从公式或以看出,提高MTBF或降低MTTR都可以提高网络可靠性。造成网络不可用的因素包括:设备软硬件故障、设备间链路故障、用户误操作、网络拥塞等。针对这些因素采取措施,使网络尽量不出故障,提高网络MTBF指标,从而提升整网的可靠性水平。 然而,网络中的故障总是不可避免的,所以设计和部署从故障中快速恢复的技术、缩小MTTR指标,同样是提升网络可靠性水平的手段。 在网络架构的设计中,充分保证整网运行的可靠性是基本原则之一。网络系统可靠性设计的核心思想则是,通过合理的组网结构设计和可靠性特性应用,保证网络系统具备有效备份、自动检测和快速恢复机制,同时关注不同类型网络的适应成本。 构建可靠的网络,需要从耐久性、容错性以及可维护性三个方面进行网络规划设计。而网络的规划设计是个系统工程,不同的设计方案的可靠性性效果不尽相同,这就需要以科学的方法进行设计,构建符合需要的可靠性网络。 1.1.1网络解决方案可靠性的设计原则 不同的网络,其可靠性的设计目标是不同的。网络解决方案的可靠性需要根据实际需求进行设计。高可靠性的网络不但涉及到网络架构、设备选型、协议选择、业务规划等技术层面的问题,还受用户现有网络状况、网络投资预算、用户管理水平等影响,因此在规划可靠性网络时需要因地制宜,综合考虑各方面的影响因素。
VVVF门机控制器
展鹏数字式VVVF同步带门机和挂件安装调试说明(部分) (2009-04-15 16:00:20) 数字式VVVF同步带门机和挂件安装调试说明 2 面板说明 2.1 双位七段码显示 2.1.1 正常工作状态下显示门位置的脉冲 位置脉冲用双位十进制显示:门完全闭合位置(门刀已完全放开)显示为00,门完全开足位置显示为99,其它位置按比例显示。 2.1.2 修改参数时,参数类别号以双位十六进制显示;参数值用双位十进制显示,当前位闪烁显示。 2.1.3 参数值设置报警以双位闪烁方式显示,十位闪烁显示出错的参数类别(U、 H、P),个位闪烁显示“-” 。 2.1.4 故障显示,十位闪烁显示“-”,个位闪烁显示故障代码(1-8)。 2.1.5 面板显示优先级:参数设置>参数值设置故障>门机故障>正常显示。 2.2 键盘分布 ①③ ②④ 左上①键-----∧键,向上翻转参数号/参数值增1/面板开门; 左下②键-----∨键,向下翻转参数号/参数值减1/面板关门; 右上③键-----F键,进入参数设置/光标移位/退出参数设置/中止 开关门; 右下④键-----Enter键,进入参数修改/确认修改值。 2.3 在设定A1=01/A1=02时,可按∧键开门或∨键关门 在A1=02时,按∧键/∨键可使正在开/关门中的门机反向关门或开门; 在A1=02/A1=03/自学习开关门时,可用F键中止本次开关门运行。 2.4 在非开关门状态下,按F键从正常显示脉冲进入参数设定状态。
2.5 首先面板显示参数号A1,这时可按∧或∨键往上或往下翻转,可持续按住∧或∨键快速翻转,找到要修改的参数号。 2.6 按Enter键进入参数修改状态,显示变为当前参数的参数值,这时可按∧或∨键修改参数值,可持续按住∧或∨键快速增减;也可按F键(在参数修改状态时转义为移位键)使光标从个位移至十位或从十位移到个位,然后修改参数值,改完后按Enter键确认,系统会自动转至下一个参数号。 2.7 全部参数设定完成后,在显示参数号状态时按F键退出,进入正常运行状态。 3.1.1 面板点动开关门(A1=01) 当A1=01时,持续按住∧键或∨键才能保持开关门,释放按键开关门即停止 当未进行过自学习时,只有面板点动功能方可进行开关门运行。但该功能不可进行上电自整定(后有详述)。 3.1.2 面板手动开关门(A1=02) 当A1=02时,且门机已自学习过,按一下∧或∨键,会持续开门或关门直至到位,本次开关门过程可用F键中止。 3.1.3 自动定时开关门(A1=03/04,门机演示功能) 当A1=03,门机会自动定时开关门,定时间隔时间由A6设定,本次开关门运行可用F键中止。这时可直接接入门保护装置:如红外光幕或安全触板。 3.2 联机状态 开关门运行需要电梯控制柜控制时的状态(即设置A1=00,端子控制状态)。 联机状态时,位置脉冲显示以双位正常形式显示,不再闪烁。 3.3 注意 当用户调试或维护门机结束、准备交付正常使用前,请注意面板显示方式,须转至联机状态(不闪烁),电梯的自动开关门方可正常。 4 电气调试 4.1 准备工作 按电气接线图正确接线,插紧各接插件。把电梯开至平层位置带上厅门(以下同),先拨下门机控制器上外接电源,用手来回盘动门机,确认无任何呆滞后插上门机电源,这时可以调试门机。 4.2 该门机系统出厂前已经过调试,连接好外接线路即能正常运行,如需重新调试按以下步骤进行。 4.3 置L1=01,取出厂值。 4.4 确认开、关门的方向 断开门机电源,将门盘至半开半关,通电并置A1=01,按住∧键,应向开门方
申菱新门机控制器调试说明书
目录 1.概要 (2) 2.注意事项 (2) 3.端子功能 (2) 4.按键名称和基本操作 (3) 5.接线图 (4) 6.开关门曲线说明 (5) 7.基本调试1 (7) 8.基本调试2 (7) 9.功能参数表 (9) 10. 监控和故障显示 (12) 11.与MPK708/808/货梯BLT V-N接线对照 (14)
1、概要 为适应宁波申菱新推出NSFC01-01型门机控制器的使用要求,编写本调试说明书。NSFC01-01型门机控制器是结合门机的机械结构和门机用户控制功能的特点,委托松下电工开发的新一代门机专用型变频调速系统。它通过编码器反馈的信息进行闭环控制,具有优良的调速特性,启动力矩大,动态响应快,齐全的专用保护和状态监视功能,并具有调试简单、运行平稳可靠、噪音低等特点。 2、注意事项 1 必须由具有专业资格的人员才能对控制器进行调试、维修或检查。 2 确认输入电源处于完全断开的情况下,才能进行配线作业。 3 不要把输入端子(L,N)与输出端子(U,V,W) 混淆,否则会损坏控制器。 4 将控制器的接线地端子可靠接地,否则有触电危险。 5 通电情况下,不要用手触摸控制端子,否则有触电危险。 6 在充电指示灯彻底熄灭或正负母线电压在36V以下时进行 否则有触电的危险。 7 防止螺钉,垫片及金属之类的异物掉进变频器内部 否则有火灾及损坏财务的危险。 8 主回路接线用电缆端头的裸露部分,一定要用绝缘胶带包扎好 否则有损坏财物的危险。
3、端子功能 注: --*为控制器内部接线不在6芯控制电缆线内 4、按键名称和基本操作 4、1 按键名称
4、2 按键基本操作 以改变参数P05为22为例: 按键次序 显示内容 注:参数d 在参数p 之后。在切换到参数p 后,
网络可靠性实现
高可用性技术(故障检测技术)在路由网络中的应用 国网电科院信息通信技术服务中心蓝鹏 VER1.0 引言:为了保证网络的不间断运行,特别是核心出口网络的高可用性,通常在部署较大规模网络时,会采取链路级备份、设备级备份等方式。技术上通常使用多管理引擎备份、浮动静态路由、VRRP、HSRP等。虽然这些技术给网络带来了一些备份作用,但是对于实时性要求较高的网络还会存在一些问题,本文结合在H3C路由器上的配置实例说明一些故障检测技术与传统技术的结合(联动)从而实现更为智能的高可用性解决方案。 关键字:可靠性故障检测技术NQA BFD TRACK 路由协议网络收敛 (一)、可靠性概述 随着网络的快速普及和应用的日益深入,网络中断可能影响大量业务,因此,作为业务承载主体的基础网络,其可靠性日益成为倍受关注的焦点。在实际网络中,总避免不了各种非技术因素造成的网络故障和服务中断。因此,提高系统容错能力、提高故障恢复速度、降低故障对业务的影响,是提高系统可靠性的有效途径。 1.可靠性需求 可靠性需求根据其目标和实现方法的不同可分为三个级别,各级别的目标和实现方法如表 1 所示。 级别目标实现方法 1减少系统的软、硬件故障硬件:简化电路设计、提高生产工艺、进行可靠性试验 软件:软件可靠性设计、软件可靠性测试等 2即使发生故障,系统功能也不 设备和链路的冗余设计、部署倒换策略、提高倒换成功率受影响 3尽管发生故障导致功能受损, 提供故障检测、诊断、隔离和恢复技术 但系统能够快速恢复 表 1 在上述三个级别的可靠性需求中,第1级别需求的满足应在网络设备的设计和生产过程中予以考虑;第2级别需求的满足应在设计网络架构时予以考虑;第3级别需求则应在网络部署过程中,根据网络架构和业务特点采用相应的可靠性技术来予以满足。 2.可靠性度量 通常我们使用 MTBF ( Mean Time Between Failures ,平均故障间隔时间)和 MTTR ( Mean Timeto Repair ,平均修复时间)这两个技术指标来评价系统的可靠性。 (1).MTBF MTBF 是指一个系统无故障运行的平均时间,通常以小时为单位。 MTBF 越多,可靠性也就越高。 (2).MTTR MTTR 是指一个系统从故障发生到恢复所需的平均时间,广义的 MTTR 还涉及备件管理、客
人工神经网络作业MATLAB仿真(共3篇)
人工神经网络作业M A T L A B 仿真(共3篇) -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
人工神经网络仿真作业(3篇) 人工神经网络仿真作业1: 三级倒立摆的神经网络控制 人工神经网络仿真作业2: 基于模型整体逼近的机器人RBF网络自适应控制 人工神经网络仿真作业3: 基于RBF的机械手无需模型自适应控制研究
神经网络仿真作业1:三级倒立摆的神经网络控制 摘要:建立了基于人工神经网络改进BP 算法的三级倒立摆的数学模型,并给 出了BP 网络结构,利用Matlab 软件进行训练仿真,结果表明,改进的BP 算法控制倒立摆精度高、收敛快,在非线性控制、鲁棒控制等领域具有良好的应用前景。 1.引言 倒立摆系统的研究开始于19世纪50年代,它是一个典型的非线性、高阶次、多变量、强耦合和绝对不稳定系统.许多抽象的控制概念,如系统的稳定性、可控性、系统的收敛速度和抗干扰能力都可以通过倒立摆直观地表现出来。随着现代控制理论的发展,倒立摆的研究对于火箭飞行控制和机器人控制等现代高科技的研究具有重要的实践意义。目前比较常见的倒立摆稳定控制方法有线性控制,如LQR,LQY 等;智能控制,如变论域自适应模糊控制,遗传算法,预测控制等。 2.系统的数学模型 2.1三级倒立摆的模型及参数 三级倒立摆主要由小车,摆1、摆2、摆3组成,它们之间自由链接。小车可以在水平导轨上左右平移,摆杆可以在铅垂平面内运动,将其置于坐标系后如图1 所示: 规定顺时针方向的转角和力矩均为正。此外,约定以下记号:u 为外界作用力,x 为小车位移,i (i =1,2,3)为摆i 与铅垂线方向的夹角, i O 分别为摆i 的链接点位置。其它的系统参数说明如下:
门式起重机控制系统
门式起重机控制系统设计 门式起重机是桥式起重机的一种变形,主要用于室外的货场、料场货、散货的装卸作业。它的金属结构像门形框架,承载主梁下安装两条支脚,可以直接在地面的轨道上行走,主梁两端可以具有外伸悬臂梁。门式起重机具有场地利用率高、作业范围大、适应面广、通用性强等特点,在港口货场得到广泛使用。 PLC控制技术已经成为目前轨道式集装箱门式起重机的基本配置。PLC系统可以与工控机相连,与上位监控软件进行数据交换;还可以与司机室触摸屏相连,将有关数据传送到触摸屏监控软件,极大地方便了起重机的使用与维护。完善的电气保护系统和故障自动检测系统是现代起重机控制技术的一个重要特点,触摸屏成为轨道龙门吊司机室的必要配置。另外,直观的动画显示、中文显示、存储、打印功能等也得到广泛应用。 1.1 门式起重机的工作类型及过程 断续周期性工作类型: 生产机械的工作类型有连续、短时和断续周期性三种。 断续周期性工作类型的特点是:有一系列相似的工作周期。在每个工作周期中,机构的工作是短时的,间断的,其中有工作时间,也有休息时间。这些工作周期又是持续的、频繁的、重复的进行。 起重机吊运重物的过程是:首先将大车和小车开至吊运物的上空,放下吊钩,升起重物,将大车和小车开至安放重物位置的上空,放下重物,升起吊钩,以上是一个工作周期。再将大车和小车开至另一重物的上空,进入下一个工作周期,如此不断的重复运行。在某一工作周期中,无论是大车,小车还是吊钩,就一个机构而言,都不是连续工作的,而是短时工作,其中有工作时间(本机构工作时),也有休息时间(其他机构工作时)。这些都符合断续周期性工作类型的特点,所以说起重机的主要工作机构是断续周期性类型运行的。与之相适应,起重机的主要电控设备(电动机、控制器、控制屏、电阻器、继电器等)也是按断续周期性工作类型运行的。 断续周期性运行时,在一个工作周期中,有工作时间,也有休息时间。对电动机或电器元件的温升来说,开始工作时,不能达到其稳定值,停止时,也不能冷却到周围介质的温度,如此重复多次之后,温度便逐渐升高,最后在某两个固定的温度值间变化,温度基本稳定。按规定每一周期持续时间不超过10min,超过10min的应按短时工作类型考虑。 断续周期性运行时,各工作周期不断重复进行,要求电动机经常起动和制动,电器元件经常接通和分断,接电次数多,工作频繁。 断续运行(既有工作时间又有休息时间)和不断重复(接电次数多,工作繁重) 是起重机电器设备的两个主要特点。所以起重机用的电动机和主要电器元件(控制器、变频器、接触器、电阻器、继电器等)都是专门设计的,并自成系列。1.2 电气控制系统 1.电制与供电 本机采用交流380V、50Hz三相四线制供电系统。动力回路380V,控制回路和照明回路为220V,安全电压为24V。整机供电采用磁滞式电缆卷筒供电(左右卷放有效长度为150m),小车供电采用悬挂电缆小车式。
矿井通风系统可靠性影响因素分析
矿井通风系统可靠性影响因素分析 【摘要】我国在矿井通风系统可靠性分析评价研究方面做了很多卓有成效的工作,但由于矿井通风系统的时变性、突发性、复杂性等特点,加之矿井通风中系统的一些具体指标尚无统一标准,因此,在矿井通风系统可靠性分析方面尚需结合矿井通风的特点,全面考虑其影响因素,研究探讨评价矿井通风系统可靠性的方法,为实现矿井通风安全管理提供理论及技术支撑。 【关键词】矿井通风;可靠性;安全管理;多因素系统;通风方式;通风动力;通风网络 0 引言 矿井通风系统是由具有相互联系、相互作用、相互影响的构成因素:通风方式、通风方法、通风网路、风流监测和调控设施所组成的,具有向矿井供给新鲜风量,以冲淡排除井下的毒性、窒息性和爆炸性气体和粉尘,保证井下风流的质量符合国家安全卫生标准,营造良好的工作环境,防止各种伤害和爆炸事故的发生,保障井下人员身体健康和生命安全,保护国家资源和财产的一个多因素组成的动态的、统一的整体。而矿井通风系统可靠性就是满足以上功能的可靠程度。 1 矿井通风系统可靠性影响因素 矿井通风系统是受诸多因素影响的一个复杂、随机、非稳定的动态系统。矿井通风系统可靠性主要影响因素包括有:通风方式及方法的合理性、通风网络、通风动力、通风构筑物的状况、自然风压、巷道的贯通与封闭、工作面的推进与转移、采区接替、生产水平过渡、巷道中的行人、行车和堆积物等自然因素;还有通风监测系统的利用,通风管理规章制度及人员的素质等管理因素。 矿井通风系统复杂关联的属性具体表现为系统的多环节性、时变性、可维修性以及系统各影响因素之间的强耦合性。因此,易产生大量影响煤矿井下正常通风及安全生产的随机故障或事故隐患。 因此要研究矿井通风系统的可靠性,需要全面分析整个通风系统的特点及影响矿井通风系统可靠性的诸多因素。 2 矿井通风系统可靠性主要自然影响因素 2.1 通风方式 矿井进、回风井的相对位置的布置方式即为矿井通风方式。矿井通风方式包括中央式、对角式、分区式、混合式 4 种;矿井通风方法有抽出式、压入式、混合式。其抗灾能力各不相同。一般使风流顺向流动、折返性小的通风方式比较优越。通风方式的选择直接影响井下通风线路的长短,关系到矿井通风阻力的大
智能车库门控制系统
智能车库门控制系统Last revision on 21 December 2020
毕业设计(论文) 题目:智能车库门控制系统 学院: 专业班级: 指导教师:职称: 学生姓名: 学号: 摘要 随着汽车行业和社会经济的迅速发展,人类对于汽车的依赖性越来越强。当然,越来越多的私家车的出现,就需要涉及车库门的问题,针对车库门目前的发展现状,我们结合了AT89S51单片机和PT2262/PT2272的无线收发功能,在之前的普通车库门控制的基础上,又添加了红外发射、接收电路以及防盗报警电路等等。从而设计出一种智能车库门控制系统,此系统具有结构非常简单、可靠性高、价格低廉等诸多优点。 本篇智能车库门控制系统的门控装置,它的显着特征就在车库内和车库外设置有主控制器和在车辆内安装的密码标识器,主控制器是由单片机、解码器、315M无线接收器以及红外对管组成,密码标识器又是由编码器及无线发射器组成。PT2272及PT2262的地址和数据状态是一模一样的,而PT2262的电源端平时是断开的,如果快到车库门的时候按下按钮通电,则编码器PT2262 就会将数据和地址发射出去借助于无线发射模块,与此同时,无线接收器输出端和解码器的输入端相连接,解码器输出端VT和单片机相接,如果数据完全准确那么车库中的单片机就会自动启动电机打开车库门,而红外对管此时感应次数计数,汽车离开车库门之后门就会自动下降。 关键词:单片机,红外对管,无线接收模块PT2272/PT2262 ABSTRACT
With the rapid development of the automobile industry and the social economy, the dependence on the automobile is more and more strong. of course, the emergence of more and more private cars, you need to problems involving the garage door, in view of the current development status of the garage door, we combine the AT89S51 and PT2262 / PT2272 wireless transceiver function, prior to the ordinary garage door control based on, and add the infrared emitting and receiving circuit and the anti-theft alarm circuit and so on. To design a kind of intelligent garage door control system, the structure of this system is very simple, high reliability, low price, and many other advantages. The intelligent garage door control system of gating device. Its obvious characteristic is in the garage, and the garage set main controller and installed in the vehicle code identifier, the main controller is by the microcontroller, decoder, 315m wireless receiver and infrared to pipe and password identification device is composed of encoder and the wireless transmitter. PT2262 and PT2272 address and data state is exactly the same, and a power supply terminal of the PT2262 is usually broken, if approaching the garage door when press the button energized, encoder PT2262 will will address data and transmitted by wireless transmitting module. At the same time, wireless receiver output end and the decoder is connected to the input terminal, decoder output end of VT and MCU is connected, if the data is completely accurate so garage in SCM will automatically starts the motor open the garage door and infrared tube at this point counts of induction, the car left the garage door after door will automatically decrease. Key words: SCM, infrared wireless, receiving module PT2272/PT2262 目录
电梯机械部分原理及结构设计
电梯机械部分相关系统的原理及结构设计 随着城市建设的不断发展,高层建筑不断增多,电梯在国民经济和生活中有着广泛的应用。电梯作为高层建筑中垂直运行的交通工具已与人们的日常生活密不可分。实际上电梯是根据外部呼叫信号以及自身控制规律等运行的,而呼叫是随机的,电梯实际上是一个人机交互式的控制系统,单纯用顺序控制或逻辑控制是不能满足控制要求的,因此,电梯控制系统采用随机逻辑方式控制。目前电梯的控制普遍采用了两种方式,一是采用微机作为信号控制单元,完成电梯信号的采集、运行状态和功能的设定,实现电梯的自动调度和集选运行功能,拖动控制则由变频器来完成;第二种控制方式用可编程控制器(PLC)取代微机实现信号集选控制。从控制方式和性能上来说,这两种方法并没有太大的区别。国内厂家大多选择第二种方式,其原因在于生产规模较小,自己设计和制造微机控制装置成本较高;而PLC可靠性高,程序设计方便灵活,抗干扰能力强、运行稳定可靠等特点,所以现在的电梯控制系统广泛采用可编程控制器来实现。 电梯是将机械原理应用、电气技术、微处理器技术、系统工程学、人体工程学及空气动力学等多学科和技术集于一体的机电设备,它是建筑物中的永久性垂直交通工具。为满足和提高人们的生活质量,电梯的智能化、自动化技术迅速发展。特别是随着计算机网络技术、微电子和电力电子技术的飞速发展,现代电梯的技术含量日益提高。在改善电梯性能的同时,对电梯的设计、管理和维护人员提出了更高的要求。
第二章电梯的结构 2.1 电梯的基本结构 电梯是机与电紧密结合的复杂产品,是垂直交通运输工具中使用最普遍的一种电梯,其基本组成包括机械部份和电气部份,结构包括四大空间(机房部分、井道和底坑部分、围壁部分和层站部分)和八大系统(曳引系统、导向系统、门系统、轿厢、重量平衡系统、电力拖动系统、电气控制系统、安全保护系统)组成。 电梯基本结构如图2—1所示: