GPS水准高程拟合精度的分析

测绘通报
科技期刊
BULLETIN OF SURVEYING AND MAPPING
1998年第7期No.7 JULY 1998
GPS水准高程拟合精度的分析
沈学标
(南京地质学校210008)
【摘要】本文根据GPS定位技术在河道测量中的应用实践,分
析了GPS水准高程拟合的精度。GPS水准高程拟合精度与已知点的数量、
精度和位置有关,其中已知点的分布对其影响最大。对于十几公里长的
河道测量,当已知点均匀分布于整个测区时,在进行E级GPS平面控制
测量时,可获得2 cm~3 cm拟合中误差的GPS水准高程。
一、前言
GPS定位技术已经广泛地渗透到经济建设、国防建设和科学技术的
许多领域,理论和实践都已证明,GPS定位技术完全可以进行传统的一、
二、三、四等平面控制测量。但GPS水准的精度如何,一直引起人们的
普遍关注。E级GPS平面控制测量应用很广泛,除了在GPS网上同时施
测少量的几何水准点(以下简称为已知点)外,在不增加其他工作量的情
况下,其高程测量究竟能达到什么样的精度,已知点的数量、精度和位
置对GPS水准精度有什么影响,这是大家所关心的问题。为此,我们于
1997年9月在上海市松江县境内河道测量中作了试验。本文对此作一简
要分析。
二、测区概况和作业情况
测区较为平坦,最大比高为4 m,平均海拔高程为5 m,带状,长约
12 km,宽约500 m。为满足河道测量的需要,在测区布设了E级GPS控
制网。全网由24个点组成,平均边长为800 m,点位均布设在河流两岸。
GPS测量由南京地质学校利用3台Leica 200 S型单频接收机完成。采
用静态作业模式,各项技术要求均符合国家测绘局1992年发布的《全球
定位系统(GPS)测量规范》的要求。为了进行GPS高程测量试验,对测区
中的所有待定点(24个)进行了四等水准测量。四等水准测量由河北省地
质测绘院利用S3型水准仪完成,各项技术要求均符合《城市测量规范》
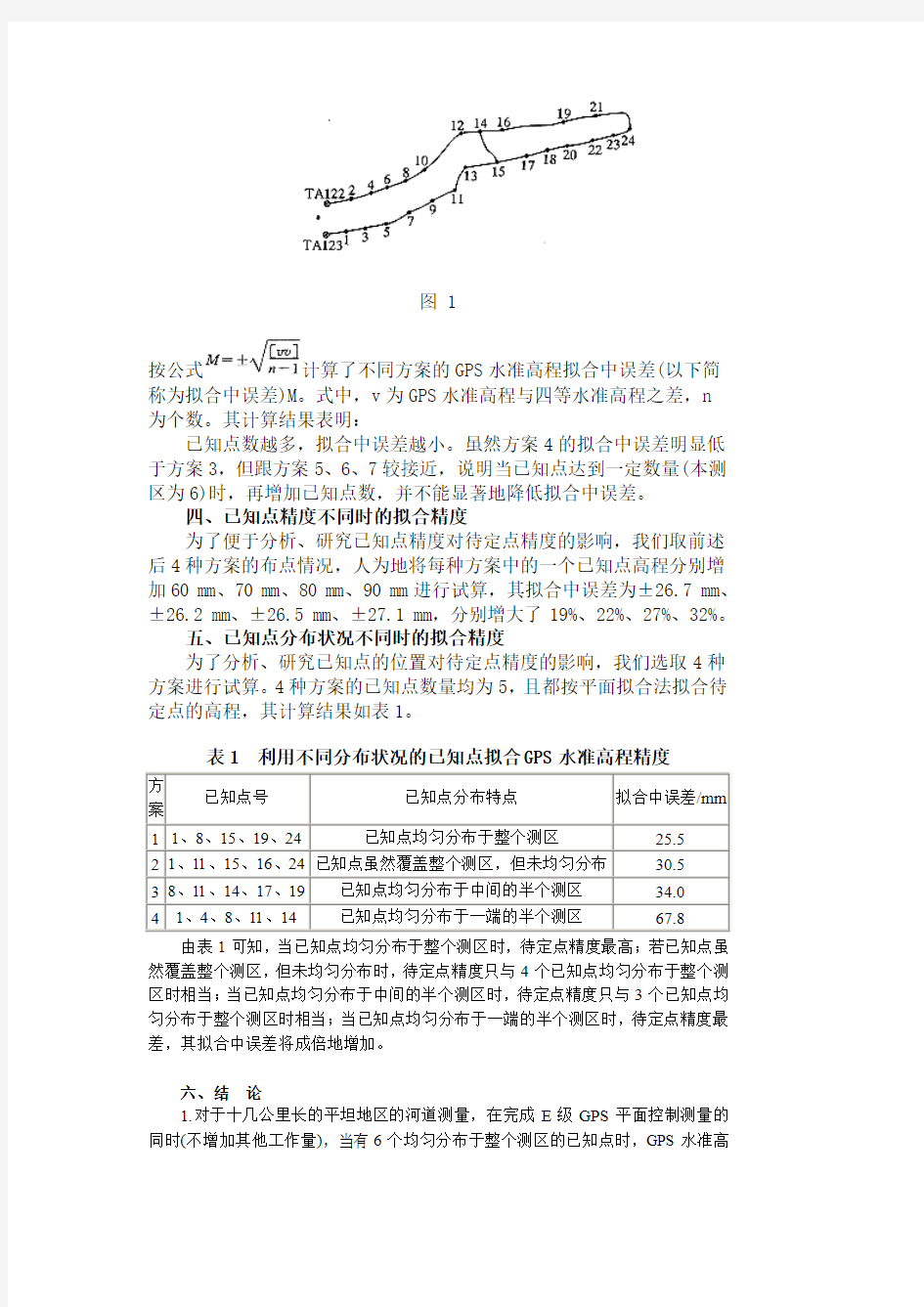
的要求。四等水准网略图如图1所示。
三、已知点数量不同时的拟合精度
为了试验、分析已知点的数量对待定点水准高程拟合精度的影响,
我们选取了7种不同方案进行了试验。其中方案1、2、3是分别用均匀
分布于整个测区的3、4、5个已知点按平面拟合方法进行计算;方案4、
5、6、7是分别用均匀分布于整个测区的6、7、8、9个已知点按二次曲
面拟合方法进行计算的。
图 1
按公式计算了不同方案的GPS水准高程拟合中误差(以下简称为拟合中误差)M。式中,v为GPS水准高程与四等水准高程之差,n
为个数。其计算结果表明:
已知点数越多,拟合中误差越小。虽然方案4的拟合中误差明显低于方案3,但跟方案5、6、7较接近,说明当已知点达到一定数量(本测区为6)时,再增加已知点数,并不能显著地降低拟合中误差。
四、已知点精度不同时的拟合精度
为了便于分析、研究已知点精度对待定点精度的影响,我们取前述后4种方案的布点情况,人为地将每种方案中的一个已知点高程分别增加60 mm、70 mm、80 mm、90 mm进行试算,其拟合中误差为±26.7 mm、±26.2 mm、±26.5 mm、±27.1 mm,分别增大了19%、22%、27%、32%。
五、已知点分布状况不同时的拟合精度
为了分析、研究已知点的位置对待定点精度的影响,我们选取4种方案进行试算。4种方案的已知点数量均为5,且都按平面拟合法拟合待定点的高程,其计算结果如表1。
表1 利用不同分布状况的已知点拟合GPS水准高程精度
由表1可知,当已知点均匀分布于整个测区时,待定点精度最高;若已知点虽然覆盖整个测区,但未均匀分布时,待定点精度只与4个已知点均匀分布于整个测区时相当;当已知点均匀分布于中间的半个测区时,待定点精度只与3个已知点均匀分布于整个测区时相当;当已知点均匀分布于一端的半个测区时,待定点精度最差,其拟合中误差将成倍地增加。
六、结论
1.对于十几公里长的平坦地区的河道测量,在完成E级GPS平面控制测量的同时(不增加其他工作量),当有6个均匀分布于整个测区的已知点时,GPS水准高
程拟合中误差为±22.4 mm。因此,GPS水准高程可以用于一般的测量工作之中。
2. GPS水准高程拟合的精度与已知点的精度有关。当已知点精度降低时,待定点精度明显降低,要得到较高精度的GPS水准高程,就需保证已知点的精度。
3. GPS水准拟合高程的精度与已知点数量有关。当已知点均匀分布于整个测区时,其点数越多,GPS水准高程拟合的精度越高。但当已知点数达到一定数量(本测区为6)时,再增加已知点数,不能显著地提高待定点的精度。参考其他测区的试验资料,对于面积小于100 km2的测区,已知点数以4~6点为宜;面积为100~200 km2之间的测区,已知点数以7~10点为宜。在进行GPS水准高程拟合时,应把其中的1~2个已知点先不作为已知点,而作为检查点,以检查拟合效果。在检查合格后,再让检查点作为已知点参与拟合。
4. 已知点的位置对GPS水准高程拟合的精度影响很大。待定点精度在很大程度上取决于已知点的分布状况。当已知点均匀分布于整个测区时,待定点精度最高。在进行GPS水准高程拟合时,一定要使已知点均匀分布于整个测区,并具有一定的代表性,宁可已知点数少,也不能因凑数而使已知点分布不均匀,更不能使已知点全部分布在测区的一端。
参考文献
[1]潘宝玉等. GPS水准高程拟合的精度研讨. 测绘技术,1996(2) [2]杨国华等. GPS水准在测图中的实用性试验. 测绘工程,1997(2)
GPS水准高程拟合报告
GPS水准高程拟合报告 实验目的: 1掌握GPS水准高程拟合的基本原理,了解高精度GPS水准的研究意义; 2能够利用Matlab编程实现几何内插法拟合GPS水准高程; 实验内容: 利用Matlab编程实现几何内插法拟合GPS水准高程,并作内插结果分析 实验原理: 1大地水准面,参考椭球面,正高,大地高之间的几何关系 A 正高的定义是:由地面点沿通过该点的铅垂线到大地水准面的距离。一般用符号Hg表示。 B 大地高的定义是:由地面点沿通过该点的椭球面法线到椭球面的距离。也称为椭球高,一般用符号H表示。大地高是一个纯几何量,不具有物理意义。同一个点,在不同的基准下,具有不同的大地高。利用GPS,可以测定地面点的WGS-84中的大地高。 C 大地水准面差距:大地水准面到椭球面的距离,称为大地水准面差距,记为hg (或N)。 如上图可以看出大地高和正高之间的关系:H=Hg+ hg 2几何内插法原理 几何内插法是通过一些既进行了GPS观测又具有水准资料的点上的大地水准面差距,采用平面或曲面拟合,配置三次样条等内插方法,得到其他点上的大地水准面差距从而反算这些点上的正高。 3二多项式拟合 N=a0+a1*dB+a2*dL+a3*dB2+a4*dL2+a5*dL*dB 公式一
式中dB=B-B0;dL=L-L0;B0=1/n∑B;L0=1/n∑L,n为GPS观测点的数量。 利用其中一些具有水准观测资料的公共点上的的大地高和正高可以计算出这些点的大地水准面差距。利用这些公共点的观测资料求得公式一的参数,再利用求得的公式进行其他点的大地水准面差距内插,和正高的拟合; 实验步骤: 1输入已知点的GPS观测值和相应的正常高构成矩阵B,L,H,h,分别是纬度矩阵,经度矩阵,大地高矩阵,正高矩阵; 2计算dB=B-B0;dL=L-L0;B0=1/n∑B;L0=1/n∑L,构成矩阵矩阵dB,dL和大地水准面差距矩阵N=H-h; 3将以上计算得到的矩阵代入公式一经过间接平差求得相应的参数a i,这样就能构成一个确定的多项式二; 4输入未知待求点的GPS观测值构成矩阵BB,LL,HH,计算相应的dBB,dLL; 5将dBB,dLL矩阵代入多项式二,解算出对应点的大地水准面差距NN矩阵; 6反算各点的正高h=H-NN; 7对计算得到的正高,大地水准面差距做对比分析; 实验分析: 1本实验中可以选择两种差值公式算法 (1)N=a0+a1*dB+a2*dL+a3*dB2+a4*dL2+a5*dL*dB (2)N=a0+a1*B+a2*L+a3*B2+a4*L2+a5*L*B 采用公式(1)的插值结果如下: Δh(dB)散点图 注:Δh(dB)是插值点的水准资料与插值结果的差值 采用公式(2)的插值结果如下:
GPS高程拟合方法及其应用
GPS高程拟合方法及其应用 论文介绍了GPS高程拟合的原理。介绍了多种拟合模型的拟合原理、模型参数的优化选择,给出了利用地表拟合求解较高精度高程异常的方法,将各种模型进行应用对比。 标签:大地高GPS水准高程异常拟合模型 1 GPS高程异常 当前GPS技术在平面控制测量工作中已经得到了广泛的应用,但在高程控制测量中却未能得到广泛应用。原因是GPS高程测量得到的是建立在WGS-84坐标系上的大地高H,而我国测量工作中采用的是正常高H。GPS高程测量可以获得厘米级精度的大地高,但在GPS大地高转换为正常高过程中,由于未能获得同等精度的高程异常ζ,导致转换所得的GPS正常高达不到精度要求。 2高程拟合常用方法 拟合法是对GPS观测点进行几何水准联测,同一点的大地高减去正常高得到该点的高程异常,再把测区的似大地水准面假定为多项式曲面或者其他数学曲面去拟合已知高程异常的点,根据拟合的曲面内插其他GPS点的高程异常值。拟合法进行GPS高程转换的数学模型很多,如多项式曲线拟合、最小二乘平面拟合、二次多项式曲面拟合等,归纳起来可以分为线状拟合模型、平面拟合模型和曲面线状拟合模型三类。 3高程拟合实例分析 一测区,选取其中32个GPS水准高程点进行拟合,将32个水准点的X与Y值通过AutoCAD一个简短的VB加载程序展绘成图: 方案一:16个起算点均匀分布 选取点2,4,8,10,11,13,16,17,19,20,24,25,26,30,31,32十六个点均匀分布于分布已知水准点,经由GPS拟合程序拟合后,计算成果中得拟合高程与水准成果的互差中误差为11.820480毫米。 方案二:16个起算点分布在一侧(非均匀分布) 选取点位集中于右下侧,分别为1,2,3,5,9,10,11,14,18,21, 22,23,25,27,28,29十六个点。经由GPS拟合程序拟合后,计算成果中得拟合高程与水准成果的互差中误差为14.631518毫米。
高程拟合
作业: 1.高程异常是如何产生的?请从实际角度谈谈如何有效地解决这一问题? 答:高程异常是由地下物质及其密度分布不均匀产生的重力异常导致的。 大地高与正常高之间的关系式:Hr= H84-ξ 其中ξ表示似大地水准面至椭球面间的高差,叫做高程异常。 地面点的正常高Hr是地面点沿铅垂线至似大地水准面的距离。 大地高是由地面点沿通过该点的椭球面法线到参考椭球面的距离,是一个几何量,不具有物理上的意义。 实际上,很难获得高精度的高程异常,而GPS单点定位误差又较大,一般测区内缺少高精度的GPS基准点,GPS网平差后,很难得到高精度的大地高H84。所以很难应用上式精确的计算各GPS点正常高Hr。 实际应用中解决高程异常问题,精确计算各GPS点的正常高Hr,目前主要有GPS水准高程,GPS重力高程,GPS三角高程等方法。 1 GPS水准高程 目前,国内外用于GPS水准计算的各种方法主要有:绘等值线图法;解析内插法(包括曲线内插法、样条函数法和Akima法);曲面拟和法(包括平面拟合法、多项式曲面拟合法、多面函数拟合法、曲面样条拟合法、非参数回归曲面拟和法和移动曲面法)。 1、绘等值线图法 这是最早的GPS水准方法。其原理是:设在某一测区,有m个GPS点,用几何水准联测其中n个点的正常高(联测水准的点称为已知点),根据GPS观测获得的点的大地高,可以求出n个已知点的高程异常。然后,选定适合的比例尺,按n个已知点的平面坐标(平面坐标经GPS网平差后获得),展绘在图纸上,并标注上相应的高程异常,再用1~5cm的等高距,绘出测区的等高异常图。在图上内插出未联测几何水准的(m-n)个点(未联测几何水准GPS 的称为待求点),从而求出这些待求点的正常高。 2、解析内插法 当GPS点布设成测线时,可应用曲线内插法,求定待求点的正常高。其原理是:根据测线上已知点的平面坐标和高程异常,用数值拟合的方法,拟合出测线方向的似大地水准面曲线,再内插出待求点的高程异常,从而求出点的正常高。
谈影响GPS高程拟合高程精度因素
谈影响GPS高程拟合高程精度的因素摘要:gps 定位技术以其精度高,全天候.成本低,效率高等特点被广泛应用于测绘及其它领域。目前在局部地区应用gps 测定的大地高精度进过高程拟合,已可以代替水准测量,将高程拟合成果直接应用到实际测量工作中,为各项工程节约大量时间和人力物力。但在一些实际工作中gps拟合高程代替水准高程又经常出现一些问题。本文将对gps解算原理经行简单介绍,重点对实际工作影响gps高程拟合高程精度的因素经行分析。 关键词:gps高程拟合高程;精度 abstract: gps technology to its high accuracy, all-weather. cost is low, the efficiency high characteristic is widely used in surveying and mapping and other fields. at present in the local area in the application of the earth were high precision gps in elevation fitting, already can take the place of the standard measurement elevation to synthetic fruit applied to practical measurement, for all the engineering save large amount of time and manpower. but in some practical work gps fitting elevation instead of standard and often have problems elevation. this paper simulates the principle of gps simple line introduces the influence to the practical work gps elevation fitting accuracy of elevation the line factor analysis.
RTK高程拟合
工程之星3.0 特色功能之一:控制点测量介绍 S730手簿蓝牙传输文件过程 RTK测量高程精度简析 2011-05-26 13:26:55| 分类:RTK测量资料| 标签:|字号大中小订阅 石家庄南方测绘导航产品部郭晓辉 使用RTK做地形图测量,既能快速的获得平面坐标又能快速的获得高程,大家都很容易接受,可是当谈论到使用RTK 是否可以做水准测量时,不少朋友都在心里打了一个问号。到底RTK 测得的高程和水准测量差多少呢?能不能满足工程的要求。其实这方面的问题已经被专家论证了多次,答案是在严格控制及选用合理的作业方法下,RTK 测量高程可以满足四等水准测量及等外的水准测量。毫无疑问,使用RTK 进行水准测量将会大大降低工作强度,同时提高作业效率。下面就介绍一下,如何使用RTK达到如上所述 的效果。 首先分析下GPS测得高程和水准测量求高程的区别,GPS 测量求得的原始坐标是WGS-84坐标(B,L,H)大地纬度,大地精度,大地高。而我国水准测量是采用1985国家高程基准,以似大地水准面为起算面,最后是以正常高作为使用的高程。因为测量原理不同,两种测量的起算面不同,所以两种高程值之间存在高程异常,即大地高= 正常高+高程异常。所以如果使用GPS要达到水准测量要求的正常高的值,必须要求提高得的大地高和高程异常值的精度。大地高的精度如南方灵锐S86RTK的精度指标垂直精度±2cm+1ppm ,静态,快速静态高程精度±5mm+1ppm,而精确的求出高程异常就是关键所在。 南方GPS,RTK 用高程拟合的方法精确求得高程异常,从而可以实时的得到控制范围内的正常 高。 GPS 水准高程拟合方法是: 在GPS 网中联测一些水准点, 利用这些点上的正常高和大地高求出它们的高程异常值, 再根据这些点上的高程异常值与坐标的关系,用最小二乘的方法拟合出测区的似大地水准面,利用拟合出的似大地水准面,内插出其他GPS 点的高程异常, 从而求出各个未知点的正常高。用于GPS 水准拟合的数学模型很多, 不同的数学模型对不同地形条件具有不同的拟合精度, 因此GPS 水准拟合模型拟合精度的探讨一直是GPS 应用研究领域的热点问题。其中多项式就是GPS 水准拟合模型的一 种,其模型可表述为 ζ= f ( x , y ) + ε 当GPS 点布设成网状时,一般采用曲面拟合的方法。 设测站点的高程异常ζ与坐标之间存在以下函数关系ζ i = f ( xi , y i ) + ε i其中, f ( xi , y i ) 为ζ的 趋势值, ε i 为误差。选用空间曲面函数 f ( x i , yi ) = a0 + a1x i + a2y i + a3x2i + a4x iyi + a5 y2i + a6 x3i + a7 x2iy i + a8x iy2i + a9y3i ( 4)进行拟合,式中ai 为待定参数。在已知点个数大于等于参数个数求出参数ai ,进而求出测区内任意点的高程异常。根据测区的不同情况,也可以选用不同的参数进行拟合。选用的参数不同,拟合出的曲面的形式也不 相同。 1多项式拟合模型分型
CORS系统高程拟合精度的探讨
CORS系统高程拟合精度的探讨 摘要:连续运行参考站(CORS)系统提供了全天候,高精度的定位服务。GPS高程精度一直难以评定,结合区域实例,利用水准测量限差和精度概念对CORS下的高程拟合精度进行了探讨。 关键词:CORS系统,高程拟合,五等水准 Abstract: Continuously Operating Reference Stations (CORS) system provides all-weather, high-precision positioning service. As GPS height accuracy has been difficult to assess, combining with regional examples, the elevation fitting accuracy of CORS is explored by using the leveling tolerance and the concept of accuracy. Key words: CORS system; elevation fitting; five-leveling GPS连续运行参考站系统(Continuously Operation Reference Stations System,简称CORS)是目前国际上主要的地面地理信息采集设施,它集成了卫星导航定位(GPS、GLONASS等)、数字通讯、有线及无线网络等技术,形成了一个不间断地面信息源采集系统,为测绘领域提供了全天候,高精度的定位服务。近几年国内省级CORS系统不断建立,有些加入了似大地水准面精化模型,有的则没有 SDCORS是“山东省基础测绘”、十一五‟规划”的重点项目,项目于2009年4月开始建设,2011年2月在济南正式通过验收;同日,由101个基准站组成的SDCORS正式启动,开始为山东省各相关行业提供服务。但是目前SDCORS系统并未加入大地水准面精化模型数据,高程数据通过高程拟合模型实现,本文在SDCORS下,在A城市进行了一定规模的数据采集,通过与五等水准高程成果比较,来探讨拟合高程的精度,看是否能够满足平原地区的大比例尺(1:1000)测图要求。 实验小组首先对A城市(平原地区)的5个C级GPS点进行观测求取了七参数,计算得到了高程拟合模型。然后在城市200km2的范围内,横纵均匀布设了140个固定图根点,并用RTK进行了测量,得到了高程坐标。最后对图根点全部施测五等水准[1],并与E级GPS点联测,得到了高程成果。 图一水准路线图 注:七参数:ΔX,ΔY,ΔZ,ωX,ωY,ωZ,m七个,其中(ΔX,ΔY,ΔZ)为坐标平移量,(ωX,ωY,ωZ)为坐标轴间的三个旋转角度(又称为欧拉角),m为尺度因子。
GPS控制网高程拟合
GPS控制网高程拟合 【摘要】通过对沁河防汛工程D级GPS网的高程拟合精度分析,探讨GPS高程拟合成果的精度与起算点分布、起算成果精度、高程拟合数学模型、GPS数据处理软件的关系。 GPS network of Qinhe flood control projects D elevation fitting accuracy, explore the accuracy of the GPS elevation fitting the results with the starting point of distribution, the date the results of precision, the elevation fitting a mathematical model, the relationship of the GPS data processing software. 【关键词】GPS 高程异常值中误差曲面拟合EGM96大地水准面模型 前言 全球定位系统(Global Positioning System-GPS)是美国从本世纪70年代开始研制,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。经近10年我国测绘等部门的使用表明,GPS以全天候、高精度、高效率等显著特点,赢得广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等测绘学科,给测绘领域带来一场深刻的技术革命。目前,大多数的城市首级控制网均采用GPS测量,而其中的高程控制主要采用传统的几何水准测量方法建立高精度的水准网。GPS高程测量却常常被忽视,认为其精度不太可靠。因此,为探讨GPS测量高程拟合成果的精度与起算点分布、起算成果精度、高程拟合数学模型、GPS数据处理软件的关系,我局结合沁河防汛工程D级测量GPS高程拟合的工作,对GPS拟合高程的精度进行了探讨,对于平坦地区以供测量GPS用户参考。 1 GPS网高程拟合的技术要求 1.1 GPS高程拟合成果外部检核 1.1.1 首先对D级GPS网中的所有点联测四等水准或三角高程,选用其中部分点作为GPS高程拟合的
GPS高程拟合精度分析
GPS高程拟合精度分析 李毅方明乐陈溪 广西第一测绘院,南宁市建政路5号530023 摘要:本文介绍了常用的GPS高程拟合方法和模型,通过实例对GPS高程拟合精度进行了分析探讨。 关键词:GPS高程测量高程拟合精度分析 1引言 GPS测量可以同时获得相对精度较高的三维坐标,即大地经度L、大地纬度B和大地高H。对于L、B可以采用严密的数学公式,将其转换成高斯平面坐标x、y,而大地高H是以WGS-84椭球面为基准的高程,是一个几何量,不具有物理意义。实际应用中的地面高程是以似大地水准面为起算面的正常高。本文将介绍将大地高这一几何量转换成具有物理量的正常高最常用的方法,并通过实例分析了影响GPS高程拟合精度的因素,以及提高GPS高程拟合精度的方法。 2GPS高程拟合方法 依据高程系统的理论,地面上任意一点的大地高H与正常高h之间的关系为: H=h+ζ(l)式(1)中ζ为高程异常,即似大地水准面与参考椭球面之间的差距。由式(1)可看出,若能求出GPS点的高程异常ζ,就可由各GPS点的大地高H求得各点的正常高h。因此,GPS高程转换的关键在于高程异常的精确求得。通常,高程异常是采用天文水准或天文重力水准的方法来测定的。但由于这些资料不易获得,无法满足工程建设的要求。为此我们可以在布设的GPS网中选择一定数量均匀分布的点,利用水准测量的方法直接联测高程(这些联测点称为公共点),然后根据式(1)求得各公共点上的高程异常ζ,然后由公共点的平面坐标和高程异常采用数学拟合计算方法,拟合区域的似大地水准面,即可求出其他GPS点的高程异常,从而求得各GPS点的正常高。 目前,国内外求取高程异常主要是采用纯几何的曲面拟合法,即根据区域内若干公共点上的高程异常值,构造某种曲面逼近似大地水准面。而多项式曲面拟合法是一种最常用的较简单、有效、实用的方法。 多项式曲面拟合法原理是:根据测区中公共点的平面坐标或大地坐标和高程异常ζ值,用数值拟合法,拟合出测区似大地水准面,再内插出待求点的高程异常值ζ,从而求出待求点的正常高。利用这种拟合方法求出的高程与直接水准测得的高程同属一个系统,不受起算点绝对坐标误差的影响。该方法的数学模型为: ζ+f(x i,y i)+εi(2)式(2)中,f(x i,y i)为ζ的拟合函数,εi为残差 实际应用中,采取二次曲面拟合法进行拟合,其表达式为: f(x i,y i)+a0+a1x i+a2y i+a3x i2+a4y i2+a5x i y i(3)
GPS高程拟合方法的比较分析
GPS 高程拟合法的比较分析 (机械工业勘察设计研究院测量公司) 摘要:工程中需要把GPS 高程测量的大地高转换为正常高。通常的做法是采用拟合法建立研究区域的似大地水准面。本文介绍了两种不同的拟合方法:二次曲面拟合法、多面函数拟合法。并结合某区域一定数量已知GPS 高程异常点来内插和外推研究区域内的任一点的高程异常。通过比较发现多面函数拟合法拟合的精度要比二次曲面拟合的精度高。 关键词:高程转换;二次曲面拟合法;多面函数拟合法 The elevation of GPS fitting to the comparison and analysis (Machinery industry survey and design institute of measuring company ) Abstract: GPS height measurement of the earth should be converted to normal high in engineering. It is usually to establish the quasi-geoid of the research area by the fitting method. This article introduces two different fitting methods: quadratic surface fitting and multiple-surface function fitting. Combined with a certain number of a region known GPS elevation anomaly points to the interpolation and extrapolation of the height anomaly at any point within the study area. By comparison, the multiple-surface function fitting to the precision is higher than the quadratic surface fitting. Key words :Elevation conversion; Quadratic surface fitting; Multiple-surface function fitting 1.引言 传统的几何水准测量虽然精度高,但耗时长、耗费多、工作效率低。GPS 由于自身测量精度高、速度快、工作效率高等优点被广泛应用于高程测量。GPS 测量的高程坐标是在WGS-84坐标系下的大地高[1],大地高是地面一点沿参考椭球面的法线到参考椭球面的距离,用符号H 表示。实际应用中需要把GPS 测得的大地高转换为正常高,正常高是地面点到通过该点的铅垂线与似大地水准面的交点的距离,用符号r H 表示。似大地水准面到参考椭球面之间的距离称为高程异常,用符号ζ表示。因此大地高与正常高之间的关系为: r H H ζ=- (1) 由于我国采用的高程系统是相对于似大地水准面的正常高,因此如何进行GPS 高程转换成为当前研究的热点问题。拟合法是GPS 高程转换中比较常用的方法,主要的拟合模型
GPS高程拟合方法
GPS高程拟合方法 3.1等值线图示法 等值线图示法是最直接的求算高程异常的方法。这种方法的核心思想就是内插的思想,绘制高程异常的等值线图,然后采用内插法来确定未知点的高程异常值。具体操作十分的简单,在测区内制定分布均匀的GPS点,用水准测量的方法来测定这些点的水准高,根据公式ζ=H-Hr求出这些点的高程异常,选择适当的比例尺按照已知点的平面坐标展会在图纸内,对已知点标注出高程异常值,再确定等高距,绘制出高程异常值的等值线图。之后就可以内插出待测点的高程异常值,进而求出待测点的正常高。这种方法只适用地形相对平坦的地方,在此种测区内采用这种方法拟合的高程精度可达到厘米级。测区的地形相对复杂内插出的高程异常值就不准确,而且这种内插法的精度往往取决于两个方面,分别是测区内GPS点的分布密度和已知点大地高的精确度。首先GPS点的分布比较密集,那么内插精度就相对较高,如果比较稀疏这时候就要借助于此测区的重力测量资料,提高内插精度。且还要注意GPS点间高程异常的非线性变化。另外就是水准点的精度,联测时尽量选取高精度的正常高,尽可能使得出的高程异常值准确,进而才能内插出待测点高精度的高程异常值。这种方法虽然简单易操作,但是有其弱点,就是精度不高,只有当对拟合精度要求不高的时候才使用此种方法(注:等值线法不需构造数学模型)。 3.2狭长带状区域线性拟合 解析内插法作为拟合高程最常用的方法,主要思想是把似大地水准面用数学曲面近似拟合,建立所在测区内最为接近似大地水准面的数学模型,以此来计算测区内任意点的高程异常值,从而计算出正常高。这种方法计算出的高程异常值的精度是由所采用的数学模型和似大地水准面的拟合程度所决定的。 解析内插法在选择数学模型时,首先要考虑的就是GPS点的分布情况。GPS点的分布情况可分为带状分布和面状分布。若GPS点是呈线状布设,而且是以沿线似大地水准面为一条连续且光滑的曲线,这时就可以采用相对于狭长带状区域的解析内插法来内插出待定点的高程异常值,从而求出待定点的正常高。这种线状分布的内插原理是:测区
高程拟合的方法和原理(二次曲面拟合代码)
高程拟合的方法和原理(二次曲面拟合代码) By Kiseigo kiseigo https://www.wendangku.net/doc/603576433.html,/lvyeqish 2011-01-06 22:37:14 '原理是用方程 h=b0+b1*x+b2*y+b3*x*x+b4*y*y+b5*x*y 来表达曲面,h指的是高程异常值,比如WGS84到bj54的高程差,然后根据6或者6个以上的公共点求出b0,b1……b5,然后如果要求某点的高程值,输入它的x,y就可以得到高程异常值h,然后利用WGS84的BLH中的H加上高程异常值就可以得到54的高程. '这个程序经过2011年01月上旬的实战精度比较高,不过存在一个弱点,就是如果北坐标比较大,如2333444.555,应该先人为的去掉最高位,这样矩阵运算才不会出异常。这是因为矩阵运算的算法不够完善。有空再解决它。 'Code By Kiseigo 2011.01.06 Option Explicit Private Sub cmdCalc_Click() Dim matA() As Double Dim matB() As Double ReDim matA(6, 5) As Double '7个已知点 ReDim matB(6, 0) As Double Call SetKnownValueAB(matA, matB) Dim arrPara() As Double 'b0,b1,b2……b6这6个参数 Call CalcB0toB6(matA, matB, arrPara) '计算b0,b1,b2……b6这6个参数
Dim Hout As Double Hout = calcHfit(11, 3, arrPara) '计算某位置的高程,这里刚好取已知点来验算 FrmMain.Caption = Format(Hout, "0.000") '结果得93.7,说明结果正确End Sub '求高程拟合(二次曲面拟合)的参数B0,B1,B2,B3,B4,B5,B6 By Kiseigo 2011.01.06 21:53 Helped by BluePan '输入matA(5,5) 最少6行,也就是最少6个已知高程点 '输入matB(5, 0) 最少6个点,这里是高程值,matB(0)是第一个点 '输出:B0toB6Out, 下标从0取起,一维数组,下标0-5 Public Function CalcB0toB6(matA() As Double, matB() As Double, B0toB6Out() As Double) '假设方程是 h=b0+b1*x+b2*y+b3*x*x+b4*y*y+b5*x*y; 方程由BluePan提供 Dim maxPt As Integer '公共点个数,要求>=6个.6表示6个点。 maxPt = UBound(matA, 1) + 1 '步骤1:加1空行,加1空列.因为矩阵运算是从1开始,麻烦 Call RedimMatrisAFrom1Nor0(matA) Call RedimMatrisAFrom1Nor0(matB) '步骤2:计算 AT * A 矩阵 Dim matAT() As Double 'A的转置矩阵 ReDim matAT(UBound(matA, 2), UBound(matA, 1)) Call MTrans(UBound(matAT, 1), UBound(matAT, 2), matA, matAT) '求A 的转置矩阵 Dim ATA() As Double 'A的转置*A ReDim ATA(UBound(matAT, 1), UBound(matA, 2)) '方阵 Call MMul(UBound(matAT, 1), UBound(matAT, 2), UBound(matA, 2), matAT, matA, ATA) '计算ATA(A的转置*A ) '步骤3:计算(A的转置*A) 的逆矩阵 Dim ATAinv() As Double 'A的转置*A 的逆矩阵 ReDim ATAinv(UBound(ATA, 1), UBound(ATA, 2)) Dim i As Integer Dim j As Integer For i = 0 To UBound(ATA, 1) For j = 0 To UBound(ATA, 2) ATAinv(i, j) = ATA(i, j) Next j
GPS高程拟合及转换方法
浅谈GPS高程拟合技术 1、前言 GPS(Global Positioning System)即全球定位系统,是1973年美国国防部为了满足军事部门对海上、陆地和空中设施进行高精度导航和定位的要求而研究的新一代高精度卫星导航系统。GPS是以人造卫星为基础的无线电导航系统,它是利用天空中均匀分布的24颗GPS卫星轨道参数及其载波相位信号,通过地面接收设备接收其发射信息,实时地测定地面接收载体的三维位置。 我院从1999年开展了GPS技术在公路勘测中的应用研究。几年来的生产实践,我们认识到了GPS技术在平面控制测量和路线中桩、边桩放样方面具有传统测量工作不可比拟的优势,可以极大的降低劳动作业强度,提高作业效率,但GPS技术在高程测量方面的应用还一直处于研究状态。本文结合几年来的生产实践仅就GPS技术在高程拟合方面的应用谈谈自己的观点: 2、高程异常 GPS测得三维坐标高程为各GPS点在WGS—84坐标系中的大地高H,而公路勘测所用的地面高程是相对于似大地水准面的正常高H正,两者之间的差值称为高程异常,用公式可表示为: ζ=H—H正 式中:ζ—为高程异常 要将GPS所求的大地高转换成正常高,关键是求得精确的高程异常ζ。 目前通常采用二次曲面函数对高程异常进行曲面拟合,对于GPS水准联测点P K拟合模型可写为 ζK=a0+a1Δx k+a2Δy k+a3Δx2k+ a4Δy2k+ a5Δx kΔy k—εk 式中Δx k=x k—x0 Δy k=y k—y0 x0,y0是参考点的坐标,一般取重心坐标;x k,y k是P k点的平面坐标,也可是大地纬度和大地经度;εk为拟合残差。按最小二乘法可求得拟合系数a为 a=(A T A)-1A Tζ 式中a=[ a0 a1…a n]T ζ==[ζ0 ζ1…ζn]T 1 Δx1 Δy1 Δx21 Δy21 Δx1Δy1 1 Δx 2 Δy2 Δx22 Δy22 Δx2Δy2 A= ……………… ……………… 可以看到,在采用二次曲面拟合时,至少应有6人GPS水准联测点,当少于6个时,则应去掉二次项拟合系数σ3,σ4,σ5,即采用平面系数拟合,此时拟合模型为