拉幕下载任务书
用51单片机做的拉幕式数码显示课程设计作者:jdzj868来源:机电之家下载站录入:jdzj868更新时间:2010-1-11 16:39:30点击数:0
【字体:】
1.实验任务
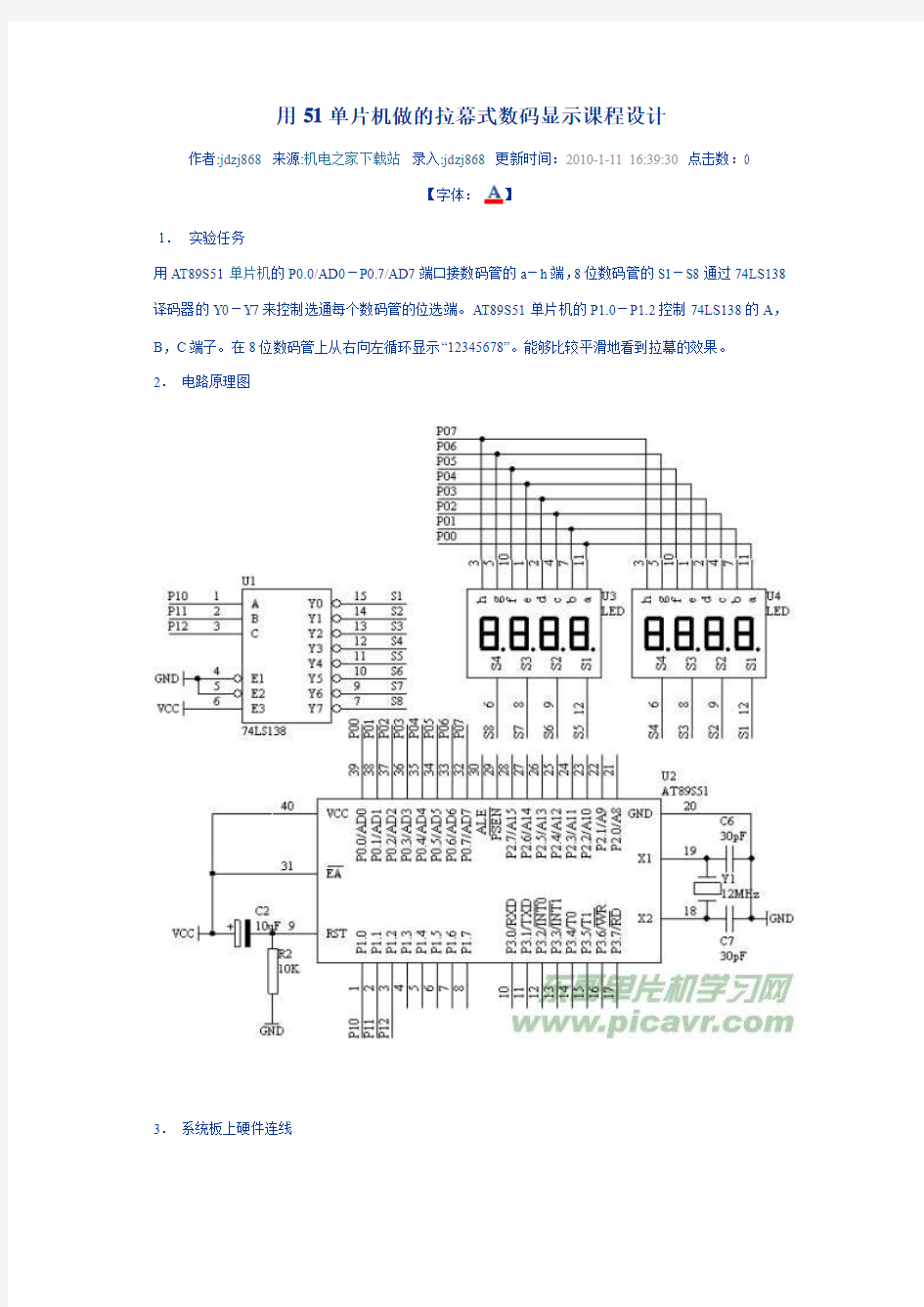
用AT89S51单片机的P0.0/AD0-P0.7/AD7端口接数码管的a-h端,8位数码管的S1-S8通过74LS138译码器的Y0-Y7来控制选通每个数码管的位选端。AT89S51单片机的P1.0-P1.2控制74LS138的A,B,C端子。在8位数码管上从右向左循环显示“12345678”。能够比较平滑地看到拉幕的效果。
2.电路原理图
3.系统板上硬件连线
(1.把“单片机系统”区域中的P0.0/AD0-P0.7/AD7用8芯排线连接到“动态数码显示”区域中的a-h端口上;
(2.把“三八译码模块”区域中的Y0-Y7用8芯排线连接到“动态数码显示”区域中的S1-S8端口上;
(3.把“单片机系统”区域中的P1.0-P1.2端口用3根导线连接到“三八译码模块”区域中的A、B、C“端口上;
4
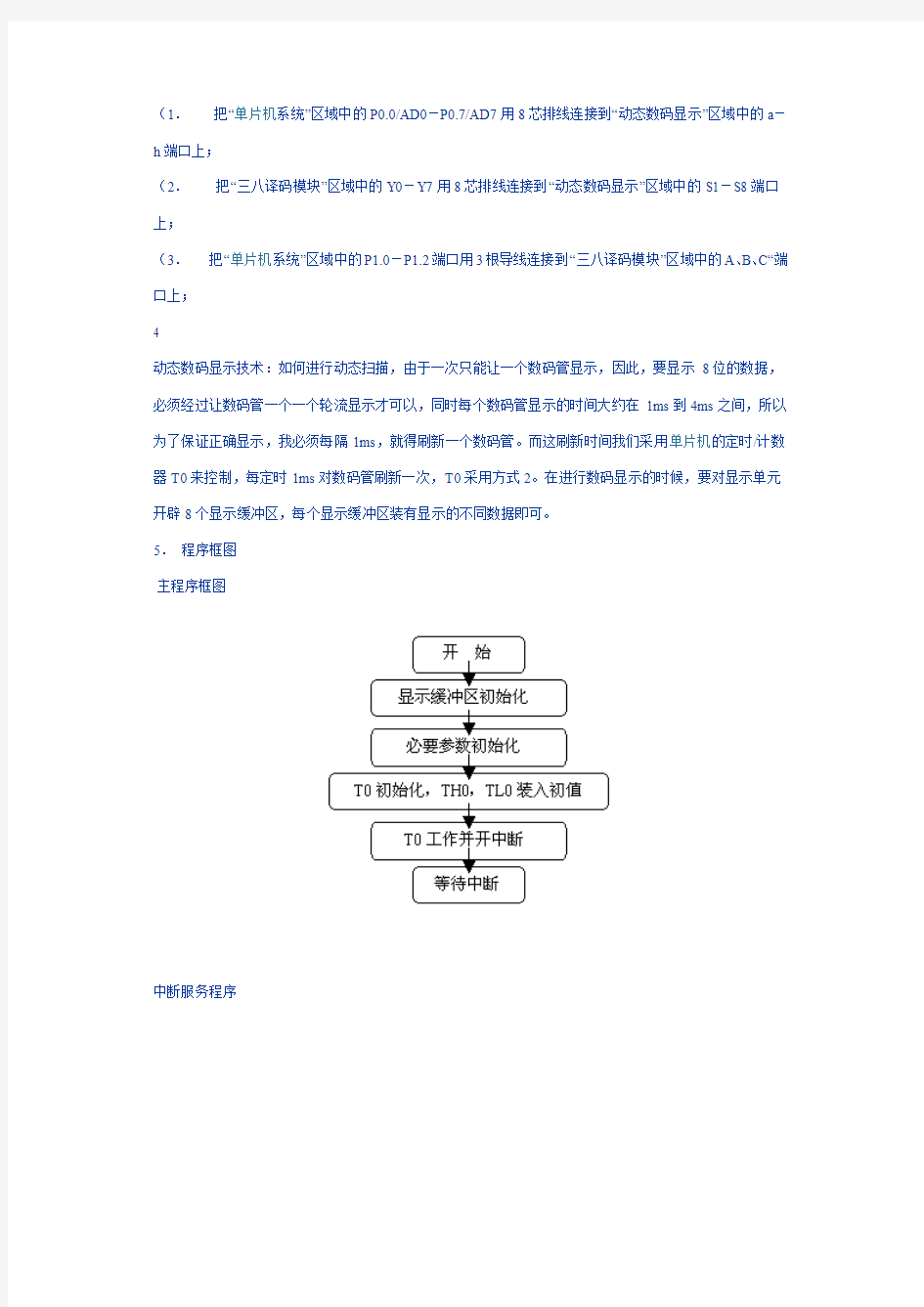
动态数码显示技术:如何进行动态扫描,由于一次只能让一个数码管显示,因此,要显示8位的数据,必须经过让数码管一个一个轮流显示才可以,同时每个数码管显示的时间大约在1ms到4ms之间,所以为了保证正确显示,我必须每隔1ms,就得刷新一个数码管。而这刷新时间我们采用单片机的定时/计数器T0来控制,每定时1ms对数码管刷新一次,T0采用方式2。在进行数码显示的时候,要对显示单元开辟8个显示缓冲区,每个显示缓冲区装有显示的不同数据即可。
5.程序框图
主程序框图
中断服务程序
6.汇编源程序
DISPBUF EQU 30H DISPCNT EQU 38H DISPBIT EQU 39H
T1CNTA EQU 3AH
T1CNTB EQU 3BH CNT EQU 3CH
ORG 00H
LJMP START
ORG 0BH
LJMP INT_T0 START: MOV DISPCNT,#8
MOV A,#10
MOV R1,#DISPBUF
LP: MOV @R1,A
INC R1
DJNZ DISPCNT,LP
MOV DISPBIT,#00H
MOV T1CNTA,#00H
MOV T1CNTB,#00H
MOV CNT,#00H
MOV TMOD,#01H
MOV TH0,#(65536-1000) / 256
MOV TL0,#(65536-1000) MOD 256
SETB TR0
SETB ET0
SETB EA
SJMP $
INT_T0:
MOV TH0,#(65536-1000) / 256
MOV TL0,#(65536-1000) MOD 256
MOV A,DISPBIT
ADD A,#DISPBUF
MOV R0,A
MOV A,@R0
MOV DPTR,#TABLE
MOV C A,@A+DPTR
MOV P0,A
MOV A,P1
ANL A,#0F8H
ADD A,DISPBIT
MOV P1,A
INC DISPBIT
MOV A,DISPBIT
CJNE A,#08H,NEXT
MOV DISPBIT,#00H NEXT: INC T1CNTA
MOV A,T1CNTA
CJNE A,#50,LL1
MOV T1CNTA,#00H
INC T1CNTB
MOV A,T1CNTB
CJNE A,#8,LL1
MOV T1CNTB,#00H
INC CNT
MOV A,CNT
CJNE A,#9,LLX
MOV CNT,#00H
MOV A,CNT
LLX: CJNE A,#01H,NEX1
MOV 30H,#8
LL1: LJMP DONE
NEX1: CJNE A,#02H,NEX2
MOV 31H,#8
MOV 30H,#8
LJMP DONE
NEX2: CJNE A,#03H,NEX3
MOV 32H,#8
MOV 31H,#8
MOV 30H,#8
NEX3: CJNE A,#04H,NEX4
MOV 33H,#8
MOV 32H,#8
MOV 31H,#8
MOV 30H,#8
LJMP DONE
NEX4: CJNE A,#05H,NEX5
MOV 34H,#8
MOV 33H,#8
MOV 32H,#8
MOV 31H,#8
MOV 30H,#8
LJMP DONE
NEX5: CJNE A,#06H,NEX6
MOV 35H,#8
MOV 34H,#8
MOV 33H,#8
MOV 32H,#8
MOV 31H,#8
MOV 30H,#8
LJMP DONE
NEX6: CJNE A,#07H,NEX7
MOV 36H,#8
MOV 35H,#8
MOV 34H,#8
MOV 33H,#8
MOV 32H,#8
MOV 31H,#8
LJMP DONE
NEX7: CJNE A,#08H,NEX8
MOV 37H,#8
MOV 36H,#8
MOV 35H,#8
MOV 34H,#8
MOV 33H,#8
MOV 32H,#8
MOV 31H,#8
MOV 30H,#8
LJMP DONE
NEX8: CJNE A,#00H,DONE
MOV 37H,#10
MOV 36H,#10
MOV 35H,#10
MOV 34H,#10
MOV 33H,#10
MOV 32H,#10
MOV 31H,#10
MOV 30H,#10
LL: LJMP DONE
DONE: RETI
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH,00H END
7.C语言源程序
#include
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00}; unsigned char dispbitcode[]={0xf8,0xf9,0xfa,0xfb,
0xfc,0xfd,0xfe,0xff};
unsigned char dispbuf[8]={16,16,16,16,16,16,16,16}; unsigned char dispbitcnt;
unsigned int t02scnt;
unsigned char t5mscnt;
unsigned char u;
unsigned char i;
void main(void)
TMOD=0x02;
TH0=0x06;
TL0=0x06;
TR0=1;
ET0=1;
EA=1;
while(1);
}
void t0(void) interrupt 1 using 0
{
t5mscnt++;
if(t5mscnt==4)
{
t5mscnt=0;
P0=dispcode[dispbuf[dispbitcnt]];
P1=dispbitcode[dispbitcnt];
dispbitcnt++;
if(dispbitcnt==8)
{
dispbitcnt=0;
}
}
t02scnt++;
if(t02scnt==1600)
{
t02scnt=0;
u++;
if(u==9)
{
u=0;
}
for(i=0;i<8;i++)
{
dispbuf[i]=16;
}
for(i=0;i { dispbuf[i]=8; } } } 机械设计基础 大作业计算说明书题目:平面连杆机构设计 学院:材料学院 班号: 学号: 姓名: 日期: 2014年9月30日 哈尔滨工业大学 机械设计基础 大作业任务书 题目:平面连杆机构设计 设计原始数据及要求: () 目录 1设计题目 2设计原始数据 3设计计算说明书 3.1计算极位夹角 3.2设计制图 3.3验算最小传动角4参考文献 1 设计题目 平面连杆机构的图解法设计 2 设计原始数据 设计一曲柄摇杆机构。已知摇杆长度,摆角,摇杆的行程速比系数,要求摇杆靠近曲柄回转中心一侧的极限位置与机架间的夹角为,试用图解法设其余三杆的长度,并检验(测量或计算)机构的最小传动角。 () 3 设计计算说明书 3.1 计算极位夹角 极位夹角 代入数值 3.2 设计制图 3.2.1 在图纸上取一点作为点,从点垂直向上引出一条长为的 线段,终点为; 3.2.2 从点在左侧引出一条与夹角为的射线; 3.2.3 以点为圆心,以为半径画圆,与射线交于点; 3.2.4 分别从、两点向下引两条射线,射线与夹角为,两射 线交于点,点即为曲柄的回转中心; 3.2.5 以点为圆心以为半径画圆; 3.2.6 过点向左侧引出一条射线,射线与夹角,与圆交于点; 3.2.7 连接,并量取其长度,以为半径画圆,直线,与圆的 交点分别为,; 3.2.8 在图中量取,, 3.3 验算最小传动角 3.3.1 在处根据余弦定理 3.3.2 在处根据余弦定理 所以最小传动角 4 参考文献 [1]宋宝玉,王瑜,张锋主编.机械设计基础.哈尔滨:哈尔滨工业大学出版,2010. [2]王瑜主编.机械设计基础大作业指导书.哈尔滨:哈尔滨工业大学出版社,2014. 第一章前言 拖拉机是用于牵引和驱动各种配套机具,完成农业田间作业、各种土石方工程作业和固定作业等的动力机械,拖拉机必须和各种作业机具组成拖拉机机组才能完成各种作业。机组所完成的作业种类虽然极为繁多,但根据机组的工作方式可分为移动式和固定式两类。 在移动式工作中,拖拉机机组只能够是在移动过程中来完成工作的,此时拖拉机的功率主要是以牵引力的方式传给作业机具。移动式工作,可分为田间工作和运输工作两种。当拖拉机在田间工作时,拖拉机可与各种牵引式或悬挂式作业机具一起,对土壤、土石方或作物进行各种加工工作;当拖拉机作运输工作时,拖拉机可与牵引式、悬挂式后驱动式的挂车一起,在道路上或田间完成运输工作。 在固定式工作中,拖拉机停在固定的工作地点,通过拖拉机的动力输出轴和胶带轮来带动各种固定式机器,拖拉机的功率是以转矩的方式传给固定式机器。 拖拉机产品发展简史及其在国民经济中的作用。 19世纪50年代,在英美等国先后诞生了用蒸汽发动机带动胶带功率输出装置,并被用作驱动脱粒机的动力源,这种装置就是拖拉机的雏形。但从一地转移到另一地需用牛马来牵引,因而1856年“拖拉机”一词在英国牛津词典中首次作为“牵引发动机”一词的同义词应用。随着拖拉机的发展到第二次世界大战以后,个工业发达国家都实现了农业机械化,拖拉机的使用逐步晋级,结构和性能日趋完善,除轮式和履带拖拉机外,手扶拖拉机在园艺和水田作业方面开始广泛应用。1950—1960年,在欧洲曾设计与制造过对中自走底盘,后来未获得广泛使用,在此期间,拖拉机的功率急剧增加,柴油拖拉机的比例增大,出现了液压转向和动力换挡变速箱等新结构,并成为广泛选用的装置。1961—1970年,拖拉机的功率继续急剧增大,除少数小型拖拉机外都装用柴油机。驾驶员的安全和舒适性成为产品技术发展的重点,全动力换挡变速箱和子午线轮胎成为选装结构。1971—1979年,采用了增压和增压中冷柴油机,翻车保护装置被作为选用装置并被一些国家列入有关法规之内,大多数大型拖拉机装置了驾驶室并在一些国家的实验规则中增加了噪声水平测定。四轮驱动拖拉机被普遍采用,功率大于75KW的大型拖拉机继续增加。 随着拖拉机工业的发展,我国拖拉机产品的科研与设计水平逐步提高。产品开发设计工作经历了从引进仿制、自行设计到系列产品开发这样三个阶段。在我国拖拉机工业是建国以后发展起来的新兴产业。在此之前,不用说生产拖拉机,连主要的零部件也不能制造。1949年全国仅拥有拖拉机117台,全都是从国外进口的。建国以后,经过30多年的艰苦努力,拖拉机工业从无到有,从小到大,现已形成大、中、小企业相结合,具有一定规模的拖拉机制造体系,能成批生产从2.2KW至58.8KW的手扶式、轮式和履带式农业、林业用的各种拖拉机,基本上可满足农、林、牧、副、渔各业生产以及工业产品配套的需要。至1990年底,全国拥有大中型农用拖拉机81.4万台,小型拖拉机698万台,农用拖拉机总动力8982.5万KW。1990年全国大中型拖拉机的年产量4.22万台,小型拖拉机108.05万台。工业履带拖拉机1991年产量2722台,有51—235KW的29个品种。 今年来,以动态、优化、计算机化为核心的现代设计方法在拖拉机产品设计得到研究和较广泛的应用。一些重要的行之有效的现代化设计方法和分析技术继承、延伸和发展了传统设计方法的精华,它们在拖拉机产品设计不同阶段中的应用,对整机和不同的系统、不见和主要零件的设计与计算起到了某些独特的效果与作用,使设计更精确与迅捷。传统设计中应用的方法和技术也得到了扩充和完善,普遍为拖拉机设计人员掌握与运用。 机械原理课程设计 插床机构综合 学生姓名:________ 卢佛俊 专业班级:08 机电二班学号: 目录 一、设计题目简介 二、设计数据与要求 三、设计任务 四、插床主体机构尺寸综合设计 五、插床切削主体结构运动分析 六、重要数据及函数曲线分析七、工作台设计方案 八、总结 九、参考文献 设计题目:插床机构综合 一、设计题目简介 插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图示为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y—y作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴厂」上的凸轮驱动摆动从动件〔厂和其他有关机构(图中未画出)来实现的。 插床机构运动方案示意图 针对图所示的插床机构运动方案,进行执行机构的综合与分析。 二、设计数据与要求 依据插床工况条件的限制,预先确定 了有关几何尺寸和力学参数,如表6 -4所 示。要求所设计的插床结构紧凑,机械效 率高。 插床机构设计数据插刀往复次数占(次/min )60 插刀往复行程H (mm100 插削机构行程速比系数疋2 150 中心距S金(mm 杆长之比41g1 质心坐标金(mm50 质心坐标色(mm50 质心坐标亡(mm120 凸轮摆杆长度心(mm120 凸轮摆杆行程角曹(0)15 推程许用压力角[口](0) 45 针对图所示的插床的执 (插削机构和送料机构)方案,依 各构件的 图; 假设曲柄1等速转动,画 C的位移和速度的变化规律曲 线; 3. 在插床工作过程中,插刀所受的阻力变化曲线如图所示,在不考虑各处摩擦、其他构件重力和惯性力的条件下,分析曲柄所需的驱动力矩; 4. 取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量; 5. 用软件(VB MATLA B ADAM或SOLIDWORKS均可)对执行机构进 行运动仿真,并画出输出机构的位移、速度、和加速度线图。 6. 图纸上绘出最终方案的机构运动简图(可以是计算机图)并编写说明书。 四、插床主体机构尺寸综合设计 方案选择: 方案一:结构简图如下 机械原理课程设计任务书 设计题目:压床机构设计 院(系)专业班级 学号 设计者 指导老师 完成日期年月日 目录 一. 设计要求------------------------------------------------------3 1. 压床机构简介--------------------------------------------------3 2. 设计内容-------------------------------------------------------3 (1) 机构的设计及运动分折---------------------------------------3 (2) 机构的动态静力分析------------------------------------------3 (4) 凸轮机构设计--------------------------------------------------3 二.压床机构的设计: --------------------------------------------4 1. 连杆机构的设计及运动分析-------------------------------4 (1) 作机构运动简图---------------------------------------------4 (2) 长度计算-----------------------------------------------------4 (3) 机构运动速度分析------------------------------------------5 (4) 机构运动加速度分析---------------------------------------6 (5) 机构动态静力分析------------------------------------------8三.凸轮机构设计------------------------------------------------12 一、压床机构设计要求 1.压床机构简介 图9—6所示为压床机构简图。其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮z1-z2、z3-z4、z5-z6将转速降低,然后带动曲柄1转动,六杆机构使滑块5克服阻力Fr而运动。为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。 机械原理课程设计(普通高等教育) 论文题目牛头刨床机构设计说明书 学院工学院 专业名称机械设计及其自动化 班级机械11-4班 学号111014416 姓名李鹏 小组成员 指导教师康峰 第- 1 - 页共6 页 第 2 页 共 6 页 机械原理课程设计实验指导书 一、机械原理课程设计的目的与任务 1、课程设计的目的 机械原理课程设计是继机械原理课程之后独立的设计课程。其目的是进一步加深学生对所学知识的理解。使学生对于机构分析与综合的基本理论、基本方法有一个系统的完整的概念,培养学生综合运用所学知识独立解决机构设计问题的能力和使用计算机解决工程技术问题的能力。同时培养学生的创新精神。 2、课程设计题目:牛头刨床机构设计或其他自选题目 3、课程设计的任务 课程设计的任务是根据要求拟定和论证机器的主体机构的设计方案,并对选定方案进行运动分析,确定飞轮转动惯量,对齿轮机构进行设计计算,最后完成设计图纸,设计说明书(A4纸)(如果在计算过程中借助计算机计算,则需要打印源程序和计算结果、图表结果)。 课程设计包括,主体机构设计,齿轮机构设计两个部分。主体机构由学生自定设计方案,齿轮机构采用统一设计方案。 4、课程设计的准备和注意事项 在课程设计前要阅读指导书,复习有关课程内容,拟定主体机构的设计方案前要查阅有关资料,观看录像片,了解各种机构及其使用场合。 图1 切削力图2 牛头刨床机构 二、主体机构设计 主体机构是指实现刨刀往复运动(主运动)的传动机构,设计方案由学生在作方案比较和论证的基础上自选。 1、主体运动的运动要求和动力要求 (1)刨刀工作行程要求速度比较平稳,空回行程时刨刀快速退回,机构行程速比系数在1.4左右。 (2)刨刀行程H=300mm或H=150mm。曲柄转速、切削力、许用传动角等见表1。 (3)切削力P大小及变化规律如图1所示,在切削行程的两端留出一点空程。 2、设计要求 在满足运动要求和动力要求的条件下,每组拟出1个设计方案(可自己设计,也可从3的建议中选取),对选定的方案用图解法作一个一般位置的运动分析,包括机构运动简图,速度,加速度图。 3、主体机构设计方案选择 A、摆动导杆机构与摇杆滑块机构组合 B、转动导杆机构与对心曲柄滑块机构组合 C、偏置曲柄滑块机构 D、曲柄摇杆机构与摇杆滑块机构组合 E、双曲柄机构与对心曲柄滑块机构组合 F、摆动导杆机构与齿轮齿条机构组合 G、摆动从动件凸轮机构与摇杆滑块机构组合 第 3 页共6 页 曲柄摇杆机构设计方法 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】 曲柄摇杆机构设计方法作者姓名:XXXX 专业名称:机械工XXXX及自动化 指导教师:XXXX讲师 摘要 曲柄摇杆机构中构件的运动样式多样,可以实现给定运动规律或运动轨迹且承载能力高、耐磨顺,制造简单,已于获得较高的制造精度,因此曲柄摇杆机构在各种机械仪器中获得广泛的应用。 本文针对曲柄摇杆机构的行XXXX速度变化速度系数和给定点的轨迹设计曲柄摇杆机构,通过深入分析机构的行XXXX数度比k、摇杆摆动角ψ、最小传动角,极为夹角和摇杆摆动角等运动性能参数与结构尺寸间的关系。通过引入曲柄固定铰链点的位置角建立了曲柄摇杆和机架长度关于θ和?的显示函数关系,通过解析法、几何作图法、和实验法设计曲柄摇杆机构。在此基础上研究机构设计的可能附加要求极其相应的设计方法为曲柄摇杆设计提供各种可能选项并对曲柄摇杆的急回特性和死点情况进行说明。 关键词:曲柄摇杆机构行XXXX速度系数摇杆摆动设计方法 Abstract The diversity of movement component in the crank rocker mechanism can achieve given amotion or motion trajectory and have the high bearing capacity, wear-resisting, simple manufacture,and higher manufacturing accuracy. therefore ,the crank rocker mechanism is widely used in various mechanical instrument. In view of the crank rocker mechanism of velocity fluctuation velocity coefficient and the design of crank rocker mechanism by track point, Analysis the mechanism of the stroke number ratio K , the rocker swing angle minimum transmission angle, extremely angle and rocker swing angle motion parameter and t he relationship between structure size deeply. Introduced the crank fixed hinge point position angle of crank rocker and the frame length on and display function is built, by the analytic method, the geometric drawing method, the design of crank rocker mechanism and experimental method. On the basis of the research on the design method of mechanism design may have additional requirements and other extremely corresponding , various possible options and the crank rocker quick return characteristics and the dead are described for crank and rocker design. Key words: crank,rocker,travel speed,design 目录 机械原理课程设计 说明书 设计题目:压床机械设计 学院:机械工程学院 班级:XXX 设计者: 同组人: 指导教师: 2012年7月1日 目录 一、题目 (2) 二、原始数据与要求 (2) 1、工作原理 (2) 2.设计要求 (2) 3.设计数据 (2) 4.设计内容 (3) 三、执行机构方案选型设计 (3) 四、机构设计 (7) 1、连杆机构的设计 (7) 2、凸轮机构的设计 (9) 五、传动方案设计 (11) 六、机构运动分析与力的分析 (13) 1、位置分析 (13) 2、速度分析 (14) 3、加速度分析 (14) 七、制定机械系统的运动循环图 (17) 八、设计结果分析、讨论,设计心得 (18) 九、主要参考资料 (18) 附录 (19) 一、题目:压床机械设计 二、原始数据与要求 1. 工作原理 压床机械是有六杆机构中的冲头(滑块)向下运动来冲压机械零件的。图13.1为其参考示意,其执行机构主要由连杆机构和凸轮机构组成,电动机经过减速传动装置(齿轮传动)带动六杆机构的曲柄转动,曲柄通过连杆、摇杆带动滑块克服阻力F冲压零件。当冲头向下运动时,为工作行程,冲头在0.75H内无阻力;当在工作行程后0.25H行程时,冲头受到的阻力为F;当冲头向上运动时,为空回行程,无阻力。在曲柄轴的另一端装有供润滑连杆机构各运动副的油泵凸轮机构。 2.设计要求 电动机轴与曲柄轴垂直,使用寿命10年,每日一班制工作,载荷有中等冲击,允许曲柄转速偏差为±5%。要求凸轮机构的最大压力角应在许用[α]之内,从动件运动规律见设计数据,执行构件的传动效率按0.95计算,按小批量生产规模设计。 3.设计数据 机械原理课程 设计说明书 设计题目平面连杆机构特性分析 工程机械学院工业设计专业 2011250101班 设计者肖丹 201125010131 赵越 201125010132 鲁崧201125010107 指导教师张伟社 2014年1月16号 目录 一、设计题目简介及设计要求 (2) 1.机构简介 (2) 2.设计内容 (3) 二、VC++程序设计说明 (5) 1、四杆机构类型分析思路 (5) 2、急回运动特性分析 (5) 3、最大传动角和最小传动角 (5) 三、程序设计 (6) 1、设计思路 (6) 2、程序代码 (6) 3、程序框图 (10) 4、图解法分析 (11) 5、程序结果与解析法结果对比 (12) 四、参考文献 (12) 五、设计心得 (13) 1设计题目简介及设计要求 1.1机构简介 连杆机构是由刚性构件用低副连接而成,它是一种应用广泛的机构。平面四杆机构的特点是原动件的运动都要经过一个不直接与机架相连的连杆带动从动件运动。把具有 连杆的机构统称为连杆机构。(1)曲柄摇杆机构:两连架杆中有一个为曲柄,另一个为摇杆。(2)双曲柄摇杆:两连架杆都为曲柄。(3)双摇杆机构:两连架杆都为遥杆。 设计过程结果 1.2设计内容 (1)用VC++编程实现曲四杆连杆机构类型的分析。 (2)用CAD图解两位置以验证程序计算结果。 设计过程结果 2.VC++程序设计说明 2.1四杆机构类型分析思路 (1)最短杆与最长杆的长度和应小于等于其他两杆的长度和。 此条件称为“杆长条件”。 (2)组成该周转副的两杆中必有一杆为四杆中的最短杆。 满足杆长条件时若取最短杆为机架,则可得双曲柄机构;若取最 短杆为连架杆,则得曲柄摇杆机构;若取最短杆为连杆,则为双 摇杆机构。若不满足杆长条件则为双摇杆机构。 2.2急回运动特性分析 k=(180°+θ)/(180°-θ) 当曲柄摇杆机构在运动过程中出现极位夹角θ时,机构便具有急 回运动特性。θ角越大,k值越大,机构的急回运动性质也越显 著。 2.3最大传动角和最小传动角 γ=arccos(b2+c2-(d-a)2)/2bc γ=180°-arccos(b2+c2-(d+a)2)/2bc 飞剪机构设计说明书 一设计内容 1.根据工艺要求制定机构方案,定性比较各方案的优劣; 2.设计出满足工艺要求的机构尺寸及上、下剪刃的位置尺寸; 3.根据最终设计结果按比例绘制机构运动简图及上、下剪刃的轨迹; 4.进行机构的运动及力分析,检验上、下剪刃的速度相对误差、拉钢系数是否满足 要求,并求出曲柄上的平衡力矩Mb。 二工作原理及要求 如上图所示,摆式飞剪由四杆机构ABCD构成。上剪刃E装在连杆BC上,下剪刃F装在摇杆CD上。当曲柄AB等速转动时,将厚度为Db速度为Vt的运动 中的钢材剪成定尺(长度)为L的成品。 飞剪机运动要求: 1 曲柄转一圈对钢材剪切一次; 2 剪切时,上、下剪刃速度相对误差小于其许用值: ΔV刀=|VEt-VFt|/(VEt+VFt)<=[ ε]=0.05 3 剪切时,上下剪刃应与钢材运动同步。 一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1: V刀=(VEt+VFt)/2; δ= V刀/Vt=[ δ]=1.01~1.05 4 能调节钢材的剪切长度L 三原始数据 工艺参数 剪切力F=10T=98kN; 支座A距辊道面高约为h=250mm 刀刃生命量Δh=5mm 钢板厚度Δb=1mm 机构设计参数 按定尺L=1m给出机构的行程速比系数k、远极位传动角γ2、摇杆摆角ψ如下表所示。 四机构型综合 机构型综合的方法及一般原则 (1)固定一个构件为机架,可得到一个全铰链机构。 (2)可用移动副直接代替转动副而得到带有移动副的机构。 (3)具有两个转动副的一个构件可变换成一个高副。 (4)最简单机构原则。首先采用最简单的运动链进行机构综合,不满足要求时才采用较复杂的运动链。 (5)最低级别机构原则。采用多元连杆为机架一般不容易得到高级别机构。 (6)不出现无功能结构原则。 (7)最低成本原则。加式易难及加工成本按如下顺序递增:转动副:移动副:高副。 (8)最符合工艺要求原则。 工艺对机构的动作要求: (1)为完成剪切,上下剪刃应完成相对分合运动; (2)为剪切运动中的钢材,上下剪刃在完成相对分合运动的同时还应有沿钢材方向的运动; (3)根据以上要求可知,上、下剪刃运动轨迹之一应为封闭曲线(如图a、b、c、d 所示)。图d上、下刀刃的运动轨迹均为非封闭曲线,使得飞剪在空行程中沿钢材的逆运动方向剪切,这是不允许的。 课程设计说明书 2115柴油机连杆设计 学生学号: 学生姓名: 专业班级: 指导教师姓名:杜家益/张登攀 2018年 1 月 目录 第1章绪论 0 1.1 选题的目的和意义 0 1.2设计研究的主要内容 (1) 第2章曲柄连杆机构受力分析 (2) 2.1 曲柄连杆机构的类型及方案选择 (2) 2.2 曲柄连杆机构运动学 (3) 2.1.1 活塞位移 (3) 2.1.2 活塞的速度 (4) 2.1.3 活塞的加速度 (5) 2.2 曲柄连杆机构中的作用力 (5) 2.2.1 气缸内工质的作用力 (5) 2.2.2 机构的惯性力 (6) 2.3 本章小结 (11) 第3章活塞组的设计 (11) 3.1 活塞的设计 (11) 3.1.1 活塞的工作条件和设计要求 (11) 3.1.2 活塞的材料 (12) 第4章连杆组的设计 (13) 4.1 连杆的设计 (13) 4.1.1 连杆的工作情况、设计要求和材料选用 (13) 4.1.2 连杆长度的确定 (13) 4.1.3 连杆小头的结构设计与强度、刚度计算 (13) 4.1.4 连杆杆身的结构设计与强度计算 (15) 4.1.5 连杆大头的结构设计与强度、刚度计算 (17) 4.2 连杆螺栓的设计 (18) 4.2.1 连杆螺栓的工作负荷与预紧力 (18) 4.2.2 连杆螺栓的屈服强度校核和疲劳计算 (18) 4.3 本章小结 (18) 第5章曲轴的设计 (19) 5.1 曲轴的结构型式和材料的选择 (19) 5.1.1 曲轴的工作条件和设计要求 (19) 5.1.2 曲轴的结构型式 (19) 5.1.3 曲轴的材料 (19) 5.2 曲轴的主要尺寸的确定和结构细节设计 (20) 5.2.1 曲柄销的直径和长度 (20) 5.2.2 主轴颈的直径和长度 (20) 5.2.3 曲柄 (21) 5.2.4 平衡重 (21) 5.2.5 油孔的位置和尺寸 (21) 5.2.6 曲轴两端的结构 (22) 5.2.7 曲轴的止推 (22) 5.3 曲轴的疲劳强度校核 (22) 5.3.1 作用于单元曲拐上的力和力矩 (23) 5.3.2 名义应力的计算 (24) 5.4 本章小结 (26) 动力计算及图表 (28) 结论 (41) 致谢 (41) 参考文献 (41) 课题:《机械原理》课程设计指导老师:张青高峰 组员:5080209105龚潇 5080209110 胡凯 5080209257 王倩茹 2011年1月5日 目录 1.组员分工 (3) 2.课程设计目的 (4) 3.设计任务 (4) 4.已知条件和数据 (5) 5.主要设计内容 (6) 5.1机构位移方程 (6) 5.2质心位移方程 (6) 5.3机构速度、加速度方程 (7) 5.4质心速度、加速度方程 (8) 5.5静力学方程 (9) 5.6动力学方程 (10) 5.7惯性力平衡方程 (13) 6.设计结果讨论 (16) 6.1用Matlab绘制机构随输入运动的输出运动位移、速度、加速度曲线 (16) 6.2用Matlab计算绘制机构在不计惯性时各构件铰链的受力和输入力(或矩)的曲线 (31) 6.3用Matlab计算绘制机构在考虑惯性时各构件铰链的受力和输入力(或矩)的曲线 (32) 7.设计体会 (37) 8.参考文献 (1) 1.组员分工: 建立机构运动及力学方程组:王倩茹 Matlab解方程组、机械原理课程中布置的作业4-3中的编程:龚潇 机构动画仿真、绘制图线、机械原理课程中布置的作业4-3中的绘图:胡凯报告书写及PPT制作:王倩茹 左起:龚潇,王倩茹,胡凯 2.课程设计目的 通过机械原理课程设计,使同学掌握机构的位置、速度、加速度、静力学、动力学、惯性力平衡等方法,并能借助计算机实现机构的性能分析和该机构的运动仿真演示,从而了解机构的性能和特性。 3.设计任务 3.1根据机械原理课程设计选题,选定固定坐标系,用复数向量方程法建立机构 的位移方程即各构件的质心位移方程; 3.2在机构位移方程基础上,建立机构的速度、加速度方程以及各构件的质心的 加速度方程; 3.3在已知外力和运动分析的基础上,建立机构的静力学方程(不考虑惯性影 响),即求出机构中各构件铰链的受力和输入构件的驱动力(矩); 3.4在已知外力和运动分析的基础上,建立考虑惯性和加速度影响的机构动力学 方程,即求出考虑惯性时机构中各构件铰链的受力和输入驱动力(矩);3.5为了使机构实现惯性力完全平衡,用复数向量法建立该机构的惯性力完全平 衡条件; 3.6在上述理论分析的基础上,利用计算机编程计算并绘出机构随输入运动的输 出运动位移、速度、加速度曲线;分别计算并绘出机构在不计惯性和考虑惯性使各构件铰链的受力和输入力(或矩)的曲线。 3.7在计算机上,设计软件实现该机构的运动仿真演示。 目录 1起升机构的总体设计 (2) 1.1概述 (2) 1.2起升机构的组成和典型零部件的选型要求 (3) 1.2.1电机及其选型要求 (3) 1.2.2制动器及其选型要求 (4) 1.2.3减速器及其选型要求 (4) 1.2.4联轴器及其选型要求 (5) 1.2.5安全限位开关和超负荷限制器 (5) 1.3起升机构的方案设计 (5) 1.3.1设计参数 (5) 1.3.2卷绕系统 (6) 1.3.3起升机构布置形式 (6) 1.3.4卷筒组结构形式 (7) 2起升机构设计计算 (8) 2.1钢丝绳的选型计算 (8) 2.2滑轮选型计算 (10) 2.3卷筒设计的相关参数 (11) 2.3.1卷筒的几何尺寸 (11) 2.3.2卷筒钢丝绳的固定 (14) 2.3.3卷筒强度计算 (14) 2.4电动机的选型 (16) 2.5减速器选型计算 (19) 2.6制动器选型计算 (21) 2.7联轴器选型 (22) 2.8启制动时间和启动加速度验算 (24) 2.9制动时间和制动加速度验算 (25) 3设计小结 (27) 参考资料: (27) 起重机起升机构设计 1起升机构的总体设计 1.1概述 起升机构是用来实现货物升降的工作机构,它是起重机械中不可缺少的部分,是起重机最重要的机构,其工作性能的优劣将直接影响起重机的技术性能。 起升机构一般由驱动装置,传动装置,制动装置,卷绕系统,取物装置以及安全辅助装置等组成。在起重量较大的起重机中,常设有两个或多个不同起重量的起升机构,其中起重量最大的为主起升机构,其余为副起升机构。在港口,为满足抓斗和集装箱装卸作业要求,须设置特种起升机构,如抓斗起升机构,集装箱起升机构等。 港口门座式起重机的起升机构一般应满足下列要求: 1.起升机构设计和选型应符合买方文件规定的工作级别或规范标准的规定,当没有明确提出执行标准时,一般采用FEM规范。中国采用《起重机设计规范》(GB3811)。 2.起升机构的驱动装置一般设置在机器房内,各部件安装在具有足够强度和刚性的共用的底架上。底架再与机器房钢结构固定。 3.驱动装置的各传动轴同心度应是可调的,当轴同心度出现很小的偏差时可通过底盘和机座之间的调整垫片进行适当调整。可用定位销或楔形止动块将各部件定位在底架上。 4.传动装置的支座应有足够的倾向刚度,以承受因钢丝绳偏斜产生的侧向力,保证盘式制动器正常工作。 5.钢丝绳工作时对卷筒绳槽的偏斜角一般不大于3.5°,对滑轮槽的偏斜角最大不大于5°。当买方文件有明确规定时,应以买方文件为主。 6.在高速轴(减速器侧)和低速轴(卷筒轴侧)装设有可靠的制动器。 7.配置可靠的安全保护装置,包括高度指示器和限位保护,超载保护,超速保护,挂舱保护架,对转动部件外侧应装设安全防护栏,在卷筒的下方应有接 前言 机械制造装备设计课程设计是机械设计中的一个重要的实践性教学环节,也是机械类专业学生较为全面的机械设计训练。其目的在于: 〔1〕培养学生综合运用机械装备设计课程以及其他先修课程的理论知识和生产实际知识去分析和解决工程实际问题的机械设计能力,通过课程设计训练可以巩固、加深有关机械课程方面的理论知识。 〔2〕学习和掌握一般机械设计的基本方法和步骤。培养独立设计能力,为以后续的专业课程及毕业设计打好基础,做好准备。 〔3〕使学生具有运用标准、规范手册、图册和查询有关设计资料的能力。 零件在工艺规程之后,就要按工艺规程顺序进行加工。在加工中除了需要机床、刀具、量具之外,成批生产时还要用机床夹具。他们时机床和工件之间的连接装置,使工件相对于机床获得正确的位置。机床夹具的好坏将直接影响工件加工表面的位置精度。通常把确定工件在机床上或夹具中占有正确位置的过程,称为定位。当工件定位后,为了避免在加工中受到切削力、重力等的作用而破坏定位,还应该用一定的机构或装置将工件加以固定。使工件在加工过程中保持定位位置不变的操作,称为夹紧。将工件定位、夹紧的过程称为装夹。工件装夹是否正确、迅速、方便和可靠,将直接影响工件的加工质量、生产效率、制造成本和操作安全。在成批、大量生产中,工件的装夹是通过机床夹具来实现的。机床夹具在生产中应用十分广泛。 目录 1 专用夹具设计 (6) 1.1 设计前的准备工作 (6) 1.1.1. 明确工件的年生产纲领 (6) 1.1.2. 熟悉工件零件图和工序图 (6) 1.1.3. 加工方法 (7) 1.2.总体方案的确定 (7) 1.2.1. 定位方案 (7) 1.2.2 选择夹紧机构 (7) 1.2.3 选择导向装置 (9) 1.2.4. 夹具体 (10) 1.3. 绘制夹具装配图 (12) 1.3.1. 制图比例 (12) 1.3.2. 定位、夹紧、导向,夹具体 (12) 2 夹具装配图上应标注的尺寸和技术条件 (14) 2.1 夹具装配图上标注的尺寸 (14) 2.2. 夹具装配图上应标注的技术条件 (14) 3 夹具零件图上应标注的尺寸和技术条件 (15) 3.1 夹具零件图上标注的尺寸 (15) 3.2 夹具零件图上应标注的技术条件 (15) 4 方案设计论证 (16) 4.1设计方法与结果 (16) 5 感想 (17) 6 致谢 (18) 7 参考文献 (19) 压床机构 设计计算说明书 姓名: 学号: 班级: 指导老师: 年月 目录 第1章问题的提出 (1) 第2章设计要求与设计数据 (1) 2.1设计要求 (2) 2.2设计数据 (2) 第3章机构选型设计 (2) 3.1选择不同的方案 (2) 3.2两种设计方案的优缺点比较 (3) 第4章机构尺度综合 (4) 第5章机构运动分析 (6) 5.1压床机构的模型建立与仿真 (6) 5.2压床机构的运动仿真 (8) 5.3压床机构冲头在X方向的偏移验证 (10) 第6章机构动力分析 (11) 6.1压床机构的静力分析 (12) 6.2冲头的受力分析 (13) 6.3基点的受力情况 (14) 第7章结论 (17) 第8章收获与体会 (17) 第9章致谢 (18) 参考文献 (19) 附录1 (20) 附录2 (22) 附录3 (26) 第1章问题的提出 压床机械是由六杆机构中的冲头(滑块)向下运动来冲压机械零件的一种机构,它是应用广泛的锻压设备,用于钢板矫直,压制零件等,大部分压床都适用于金属或非金属零件的压印、成型、浅拉伸、整形及压力装配。为了能使压床机构在工作过程中能发挥出它最大的价值,就要在设计该机构的时候注意以下一些要求: (1)设计出一个连杆机构,保证其自由度F=1,以实现滑块的上下移动。 (2)如何保证滑块在进行移动的时候能保持连贯性。 (3)针对工作环境的不同和装卸货物的不同,因设计出滑块的最大提升高度,以及其它连杆的极限位置。 (4)在设计机构的时候,要考虑其维修的难易程度,不能比市面上的压床复杂,在设计其局部零件的时候,要采用通用的零件结构,以免在以后发 生故障时能方便维修。 (5)机构的材料在保证牢固的前提下要考虑其经济成本,不能只考虑材料的坚固程度,要让机构有推广的空间和市场 第2章设计要求与设计数据 2.1设计要求: (1)依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图,并分析组成机构的基本杆组。 (2)假设曲柄等速转动,画出滑块5的位移和速度的变化规律曲线。 在压床工作过程中,在不考虑各处摩擦、构件重力和惯性力的条件下, 分析曲柄所需的驱动力矩。 (3)取曲柄轴为等效构件,要求其速度波动系数小于10%,确定应加于曲柄轴上的飞轮转动惯量。 (4)确定传动系统方案,设计传动系统中各零部件的结构尺寸。 学院 《机械原理课程设计》 任 务 书 专业材料成型及控制工程 学生姓名_________ 班级12 材料本 ___________ 学号1201240041 _________ 指导教师郭国谊老师 教研室主任 _______ 起止日期2014-06-20 目录 第一章绪论 (3) 第二章机构简介与设计数据 (4) 第三章设计内容及方案分析 (6) 1)插刀速度和加速度分析 (6) 2 )数据及函数曲线分析 (10) 3)凸轮机构设计 (13) 4)齿轮机构设计 (14) 第四章设计体会 (15) 第五章参考文献 (16) 附图 (16) 第一章绪论 一、设计的题目:插床运动系统方案设计及其运动分析。 二、工作原理插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄 2 转动,再通过导杆机构使装有刀具的滑块6沿导路y—y 作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴Q 上的凸轮驱动摆动从动件l O D和其它有关机构(图中未画出)来完成的。 三,此设计是工科专业在学习《机械原理》后进行的一次较全面的综合设计训练,其目的: 1. 巩固理论知识,并应用于解决实际工程问题; 2. 建立机械传动系统方案设计、机构设计与分析概念; 3. 进行计算、绘图、正确应用设计资料、手册、标准和规范以及使用经验数据的能力训练。 四、主要内容: 1、根据插床机械的工作原理,拟定2?3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸。要求用图解法设计,并将设计结果和步骤写在设计说明书中。 3、导杆机构的运动分析。分析导杆摆到两个极限位置及摆到与机架QQ位于同一直线位置时,滑块 6 的速度和加速度。 4、凸轮机构设计。根据所给定的已知参数,确定凸轮机构的基本尺寸(基圆半径r。、机架I Q2Q8和滚子半径r b),并将运算结果写在说明书中。用几何法画出凸轮机构的实际廓线。 5、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 ~ 1 ~ 1.0起升机构 1.0.1起升机构方案之一 凸轮控制器控制转子不对称电阻方案(KT□-□/1) 主要参数: 1.0.1起升机构单线图之一 1.0.2起升机构特性图之一 电路特点: a.可逆对称电路,开环控制。 b.凸轮控制器挡位数5-0-5,12回路。 λ7.0.调整转子电阻器抽c.上升第一挡起动转矩值约为0.75Me,第二挡起动转矩值约为Me λ的启动转矩。 头接线,相应可以获得1.0Me和Me d.启动电阻级数,三相不对称电阻五级(三相合计为五段)。 上升和下降各挡位启动电阻均为手动切除。第五挡时转子电路等效电阻随电动机功率及工作制的不同而不同,转差率约为0.05~0.2. e.液压推杆制动器或三相电磁铁制动器、单制动器或双制动器可选定。 f.上升限位保护或上升、下降限位保护、上升限位单级保护或两级保护可选定。1.0.2起升机构方案之二 凸轮控制器转子不对称电阻方案(KT□-□/13F) 注:1)实际工作制时电动机功率 电路特点: a.可逆对称电路,开环控制。 b. 凸轮控制器挡位数5-0-5,11回路。 c. 上升第一挡起动转矩值约为0.7Me 或1.0Me(调整电阻抽头接线),第二挡起动转矩值约 为Me λ7.0。调整转子电阻器抽头接线,相应可以获得1.0Me 和Me λ的起动转矩。 d. 起动电阻级数,三相不对称电阻五级(三相合计为四段)。 正向和反向各挡起动电阻均为手动切除。 正向和反向第五挡转子电阻两段并联不切除。 第五挡时转子电路等效电阻随电动机功率及工作制的不同而不同,转差率约为0.05-0.2 e. 液压推杆制动器或三相电磁铁制动器、单制动器或双制动器可选定。 f. 上升限位保护或上升、下降限位保护、上升限位单级保护或两级保护可选定。 1.0.3 起升机构方案之三 主令控制器控制单相和反接制动下降方案(QR1S 、XQR2、XQS )。 注:1)实际工作制时电动机功率 2) 采用转动式接触器,Y/?接法 电路特点: a. 可逆不对称电路,开环控制。 b. 主令控制器挡位数3-0-3,11回路。 c. 上升第一挡起动转矩值约为1.5Me 。 d. 起动电阻级数,三相对称电阻四级(五段)(KW 90≤)箱)A 250(≤或五级(六段) (KW 110≥)(箱A 400≥)。起动电阻上升方向第一挡为延时继电器控制自动切除,第二挡为手动切除,第三挡为延时继电器控制手动切除。 起动电阻下降方向第一挡为全电阻,第二挡为手动切除,第三挡为延时继电器控制自动切除 e. 上升各挡位转子串电阻起动。上升第一、第二挡用于起动过渡挡和短路距离调整性移动。 下降第一挡为反接制动下降挡,用于重载(>56%Qe )下降,仅在由下降第二挡返回下降第一挡时起作用。 下降第二挡为单相制动下降挡,用于轻载(≤56%Qe )下降。 下降第三挡为再生制动下降挡。 下降第一、第二挡用于短距离调整性移动,不允许长时间使用。 f. 主令控制器手柄由上升或下降各挡打回零位、机构停车时,制动器先断电、电动机正向 通电延时0.6s 后断电,防止溜钩。 设计题目:空气锤的传动机构设计 目录 摘要----------------------------------------------------(4) 第一章课题简介---------------------------------------(5) 第二章设计方案--------------------------------------(7)(1)V带传动与链传动的比较--------------------(7) (2)气传动与液压传动的比较--------------------(7) (3)齿轮制作选择------------------------------(7) (4)传动方案---------------------------------(7) 第三章 V带传动设计-----------------------------------(9) 第四章齿轮传动设计-----------------------------------(10) 第五章轴的设计---------------------------------------(12) 第六章轴承的寿命计算---------------------------------(15) 第七章曲柄连杆机构的分析-----------------------------(16) 第八章气传动设计-------------------------------------(18) (1)行程分析----------------------------------(19) (2)打击计算----------------------------------(22) (3)气缸的计算--------------------------------(25) 第九章润滑系统---------------------------------------(26) 第十章电气系统--------------------------------------(27) 第十一章密封------------------------------------------(27) 第十二章个人小节--------------------------------------(28) 第十三章参考文献--------------------------------------(29) 致谢---------------------------------------------------(30)哈工大机械设计大作业平面连杆机构设计说明书
拖拉机传动机构毕业设计说明书
插床机构综合设计说明书
压床机构设计设计_说明书_机械原理
牛头刨床机构设计说明书
曲柄摇杆机构设计方法完整版
压床机构设计课程设计说明书-机械原理课程设计..
连杆机构设计说明书
飞剪机构设计说明书
曲柄连杆机构设计说明书。
连杆机构设计动力学仿真说明书
起升机构设计说明书
设计说明书
压床机构设计计算说明书
插床主体机构的设计---说明书
各机构原理说明书
空气锤的传动机构设计说明书1