狙击步枪测距技术

1密位就是1毫弧度。一个圆周的角度是360度,如果换用弧度来表示的话,那么:360度=2Pi 弧度=6.283弧度=6283毫弧度,部队使用时近似为6000密位。1密位所对的弧长等于半径的千分之一,或者说,1000m处,1m高的夹角就是1密位。
军事地形学的口诀是:“上间隔,下1000,密位距离摆两边,若想求得那个数,对角相乘除邻边。”
密位测距公式:L=1000 * H /a
L表示观察者至目标的距离(米)
H表示目标的宽度或高度(米)
a表示用望远镜的分化版测出的目标高低角或目标方向角(密位)
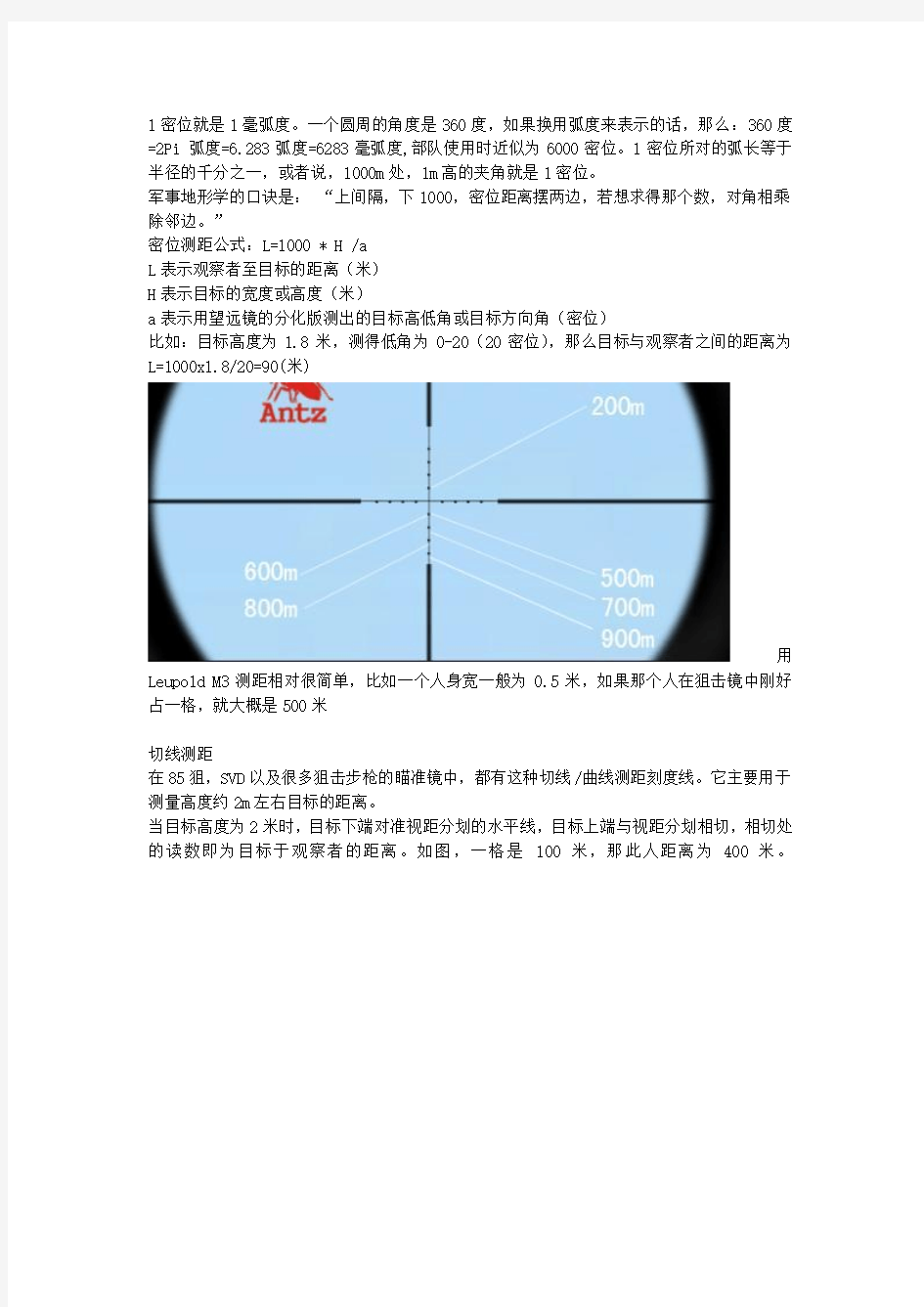
比如:目标高度为1.8米,测得低角为0-20(20密位),那么目标与观察者之间的距离为L=1000x1.8/20=90(米)
用Leupold M3测距相对很简单,比如一个人身宽一般为0.5米,如果那个人在狙击镜中刚好占一格,就大概是500米
切线测距
在85狙,SVD以及很多狙击步枪的瞄准镜中,都有这种切线/曲线测距刻度线。它主要用于测量高度约2m左右目标的距离。
当目标高度为2米时,目标下端对准视距分划的水平线,目标上端与视距分划相切,相切处的读数即为目标于观察者的距离。如图,一格是100米,那此人距离为400米。
轴上刻度测距
看图,以YMA 95-1-600式 5.8mm枪族白光瞄准镜为例,
重点看看国产88狙的测距,先上图,个人认为88狙测距是最方便的,在测距的同时可以射击,符合其精准步枪,作为步兵班支援性武器的定位。
如图黄色标靶为0.5M,其宽度刚好在1 2∧测距分划线内侧,那代表距离200米,如果是宽度等于分划线的宽度那就是100米,100米和200米合用一个标记。
这个就是距离300米。
激光测距仪操作规程
激光测距仪操作规 程
1.使用方法触按电源开关,接通电源,“电源、测试指示灯”为绿色。触按档位选择开关,选择适合的档位。 2.将仪表测量端子的两个电流输出端子用两根测试线接到被测导体的两个端子,两个电压输入端子也接到被测导体的两个端子。 3. 如图所示,电压端子应位于电流端子的内侧,并尽量靠近被测试品,以减少引线电阻引入的误差。 4.接线完毕后,触按一下 TESTE 键,“电源、测试指示灯”为红色,显示屏显示的值即为测得的电阻值。 5.当被测导体开路或阻值大于选定量程时, 显示屏首位显示“1”,后三位数字熄灭。 6.注意事项 a)本仪表使用6 节1.5V(LR6,AA)电池供电。当显示屏出现欠压符号“”时,请更换电池,以保障得到正确的试值。换下的旧电池请勿乱扔,以免造成污染。B)仪器应避免受潮、雨淋、跌落、暴晒等。
1.目的: 建立超声波测厚仪标准操作规程。 2.适用范围: 试验室所有检验人员执行本规程,部门领导监督,检查本规程的执行。 一、操作规程 1、机器校准 仪器壳下方有一个厚度为4mm的试块,按“菜单”键进入菜单,经过“上下”箭头选择“声速”,在选择“声速设置”,把声速设置为5920m/s,并在试块上涂抹耦合剂,把探头放在试块中央轻轻压紧,按一下“下箭头”,能够看到仪器显示试块厚度为4.000mm,如果试块厚度测试值不为4.000mm请在进行校准,直到试块测量厚度为 4.000mm。仪器校准完成后即能够正常测量了。 2、测试块准备 准备50mm的测试医用消毒超声耦合剂样品三份,以备测试。 3、声速测试 将探头与已准备好的测试样品耦合,确保探头不晃动并耦合良好,此时能够看到显示屏上耦合标志。选择声速测试界面,输
流量测量技术综述
流量测量技术综述 摘要:本文说明了流量测量技术在工业生产中的重要性,写出了流量测量方法的分类及相关概念。分析流量测量技术的发展现状及趋势,对四种常用流量计的机构及原理进行研究。介绍了流量测量技术在电厂中的应用,并写出了流量计的选型需要考虑因素。对流量测量技术进行综述。 关键字:流量测量流量计原理选型趋势 1 引言 流量测量是工业过程测量中的一个重要参数。在工业生产中承担着两类重要任务:其一为流体物资贸易核算储运管理和污水废气排放控制的总量计量;其二为流程工业提高产品质量和生产效率,降低成本以及水利工程和环境保护等作必要的流量检测和控制。 流量测量涉及广泛的应用领域。过程测量、能源计量、环境保护、交通运输等高耗能领域对流量测量的需求急速增长,为流量测量技术提出了新的要求。不仅要求流量测量仪表耐高温高压,而且能自动补偿参数变化对测量精度的影响,从节约能源、成本核算、贸易往来及医药卫生等方面的特殊要求考虑,要求流量测量精度高、压损小、可靠性高。新技术、新器件、新材料和新工艺及新软件的开发应用,使得流量计的测量准确度越来越高,流量的测量范围越来越广。同时流量计对测量介质的要求在降低,适用范围也越来越宽,智能化程度及可靠性得到了很大的提高。 2 流量的测量 2.1 流量测量的概念及方法分类 介质在单位时间内通过给定的通道或管道横截面的量叫做通过该截面的流量。流量的读数可以是质量单位或容积单位。流量也是总量除以时间的商。反之,总量可以看作流量与时间的积。流量与总量都是物理量,彼此通过时间相联系。 流量测量方法大致可以归纳为以下四种:利用伯努利方程原理,通过测量流体差压信号来反映流量的差压式流量测量法,用这种方法制成的仪表如转子流量计、靶式流量计、弯管流量计等;通过直接测量流体流速来得出流量的速度式流量测量法,用这种方法制成的仪表如涡轮流量计、涡街流量计、电磁流量计、超声波流量计等;利用标准小容积来连续测量流量的容积式测量,用这种方法制成的仪表如椭圆齿轮流量计、腰轮流量计、刮板流量计等;以测量流体质量流量为目的的质量流量测量法,用这种方法制成的仪表如热式质量流量计、科氏质量流量计、冲量式质量流量计等。 2.2 国内外新成果举例 2007年清华大学高晋元教授发表《参数估计法测量两相流流速》一文,提出运用模型参数估计可直接辨识随机流动噪声的渡越时间,能起到在时域对传感器信号进行预滤波的作用,推动了我国在相关流量测量技术上的进步。
脉冲发射的相位式激光测距技术研究
西安电子科技大学 硕士学位论文 脉冲发射的相位式激光测距技术研究 姓名:王刚 申请学位级别:硕士 专业:光学工程 指导教师:曾晓东 20100101
中文摘要I 中文摘要 激光测距技术,尤其是相位式激光测距技术,是一种应用广泛的距离测量技术,具有精度高、昼夜可用且性能可靠等特点,受到工程测量部门的广泛使用。一般情况下,相位式激光测距是用一调制信号对发射连续的光波进行光强调制,利用混频技术和自动测相技术,测量“调制光波”往返于被测距离的相位差,间接求得待测距离。然而对光强的连续调制存在调制波形易变形,且随着调制频率的增加,调制深度会降低,特别是在高频时就更为严重;并且与脉冲式激光测距相比,连续光强调制消耗功率大,测量距离不远等不足。从而限制了相位式激光测距技术的应用。针对连续光波光强调制存在的不足,分析相位式激光测距的检相过程,发现对检相有用的信号是整形过程中的过零点的部分,而连续信号的其他部分对数据处理没有贡献,反而这些部分使激光器连续工作,既损耗着功率,也在减少激光器的寿命。根据信号的傅里叶变换理论、频谱分析方法,脉冲(方波)与同频正弦信号之间的关系,并借鉴脉冲式激光测距技术的优点,产生了基于脉冲信号调制的相位式激光测距想法。 该方法是通过用等周期脉冲调制激光光波来代替连续光强调制激光光波,即脉冲出现的位置代表原连续调制信号的过零点位置,而激光光波脉冲的幅度和宽度不变。因此,当激光功率不稳定时,发射的激光脉冲强度变化时不会影响到调制信号的相位信息。利用等周期激光脉冲光波往返于被测距离的相位差,求得待测距离。根据该激光测距原理,本文利用DDS频率合成技术和高频电路设计知识,设计了激光测距系统方案,并对该方案进行分析,包括高频连续正弦信号与同频脉冲(方波)信号之间的关系,产生高精度高频率脉冲(方波)的方法,高频脉冲(方波)信号的混频技术以及基于CPLD的数字鉴相技术等。随后进行了电路制作,硬件实现和系统调试等工作。这样即实现了脉冲测距的测程远,功耗小的优点,也实现了相位式激光测距的高精度优点,有效地解决了相位法测距中测程与测量精度之间的矛盾,具有实际使用价值。 总之,随着激光技术和电子技术的发展,激光测距向着高精度、大量程的方向发展,势必在多种领域得到更为广泛的应用。尤其是在激光大气通信,非合作目标的高精度、远距离激光测距的应用方面具有很大的应用空间。 关键词:激光测距技术、相位、脉冲
激光测距仪使用教程
美国LaserCraft高精度激光测距仪-Contour XLRic型,这款激光测距仪是高精度和远量程的结合体,是目前市场性能最好的一款手持激光测量系统。它能成功地在保持良好精度的前提下测量以下目标到前所未有的距离:175米到电力线,400米到电线杆,800米到建筑物。同时,它是一款坚固防水的仪器,遇到下雨,下雪,大雾或沙尘暴天气时,您只把工作模式选择到“坏天气”模式,您的工作就不会受到任何影响。在坏天气下使用它,就如同在好天气下使用一样方便,好用。如果装配了三脚架,它就可以用来进行更远距离的精确测量和进行精密的倾斜测量。 Contour XLR采用最新激光技术,小巧、轻便、使用方便,可准确测量目标距离。有恶劣天气工作模式保证仪器在仪器在雨、雪、雾、沙尘暴天气条件下仍可可靠工作。仪器配备HUD显示器,可边瞄准边测量。是建筑结构规划等通用距离测量的得力仪器。最大测量距离1850米,精度0.1米。 Contour XLRi具有XLR系列的全部特点,同时增加360度倾角传感器。有六种工作模式,分别是距离、角度、水平距离、垂直距离、二点高度、三点高度。有串行口,可通过计算机或数据记录器记录数据。典型应用:矿山地形测量、森林资源调查、倾斜测量、高度测量、水平杆测量、塔高测量。 Contour XLRic将XLRi和GPS以及数据采集器结合起来,可测量不易达到目标的参数。内置软件可计算树高、倾斜、面积、周长、不见线的长度、水平距离等。XLRic内部有数字罗盘和倾角传感器,是测绘的得力仪器。
ContourMAX最大测量距离达到3000米,重仅1.6公斤,首/末目标可选,门控能力、恶劣天气模式、手持/平台安装可选。典型应用:火灾控制系统、遥测、GPS偏移测、航空测量等。和Contour 系列手持激光测量系统中的Contour XLRi比较起来,Contour XLR ic在内部又集成了一个高精度磁通量数字罗盘。配合高精度磁通量数字罗盘,XLR ic在功能就比XLR和XLRi多了不少。有了Contour XLRic,您就可以把它和您的GPS系统连接起来,去测量那些无法到达或不容易到达的地方的坐标信息,省时又省钱。或者您也可以使用它内置的软件计算:树高,倾斜度,面积,周长,空间线段的长度,水平距离,高差等等数据。由于Contour XLRic配置了数字罗盘和倾斜角度测量仪,所以它完全可以被看作是一个手持式全站仪,可以协助您进行测绘和测量工作。一级人眼安全的激光测距仪精确地向您报告以下测量数据:距离,方位,倾斜角。技术特点-测量距离到: 1850米;-测量精度达到:10厘米;-倾斜角度测量;-方位角测量;-周长测量;-面积测量;-电力线高度和垂度测量;- 3D空间尺寸测量;-连接GPS工作;-高度测量功能;-“点到点”斜距测量;-水平距离测量和垂直距离测量;-独特的坏天气模式:一般的测距仪在天气不好的情况下,测量的距离往往会大大缩短,甚至无法工作。Contour系列激光测距仪的“坏天气模式”消除了这种现象。当天气情况不好的时候,比如:多云,大雾,扬尘,潮湿等,启动该模式,测量起来就和好天气时测量一样轻松快速!工作模式(详细功能)模式一标准测量模式:该模式测量仪
户外测距仪选购建议
一、户外望远镜测距仪选购 目前测距望远镜的品牌主要有: 图雅得TRUEYARD,博士能BUSHNELL,奥尔法ORPHA,尼康NIKON,纽康NEWCON,这5个品牌。 望远镜测距仪和手持激光测距仪的主要区别是望远镜测距仪的测距误差是±1m,但测量距离远,适用于户外测量。而手持式激光测距仪的精度是mm,但测量距离一般在40~100米左右,一般只适用于室内测量,适用户外测量的手持激光测距仪目前没看到有国产品牌,国外品牌一般在2千元左右,适用户外测量的国外手持激光测距仪的测距一般在40~200m。国产还有个缺点就是测量反应慢。 2000元以下的望远镜测距仪基本只具有单一功能——测直线距离,无测高、测角、测水平距离等功能。带有测水平距离功能的望远镜测距仪价格一般在2500千元以上。 1、图雅得 全球知名的户外光学品牌,在长距离望远镜激光测距仪领域,具有非常重要的位置。长期占据全球望远镜测距仪销量第一的品牌。2011年美国时代周刊对全美的调查数据显示,在望远镜测距仪的客户中,超过52%的客户使用的是图雅得激光测距仪。图雅得望远镜测距仪具有测量精准,操作简便,功能强大、性价比极高的特点。 图雅得激光测距仪望远镜,其产品的特点主要是:功能全面,操作简单,性能稳定,性价比高。另外一点是其标称的测量距离和精度与其实际数据最为接近。 图雅得最便宜的一款是图雅得YP500 测量距离500米,亚马逊售价1300元左右。特点:实测距离与标称距离完全相符,超快测距速度,外观精美。是一款追求测量品质的测距望远镜。 2、博士能BUSHNELL 博士能测距仪是美国老牌,国际知名品牌,产品全按照美国标准生产,价格却只有国际同类产品的四分之一,Bushnell望远镜已深受世界各地人们的厚爱。 博士能在户外光学领域可以说位置极高,因为他是目前户外光学产品线最全的品牌,包括了望远镜测距仪,双筒望远镜,观鸟镜和夜视仪。博士能双筒望远镜一直维持全球第一的位置。在望远镜测距仪方面,则多年来一直保持全美第三的位置。博士能望远镜测距仪,产品非常多,是目前产品型号最多的品牌。其望远镜测距仪产品非常适合高尔夫运动,以及打猎。功能方面都是偏向这两个方面设计的。但是作为普通领域应用时,操作相对繁琐一点。另外一点产品缺乏测高的功能。但是其测距仪的观测效果非常好。
浅谈电流行波测距的实践应用
浅谈电流行波测距的实践应用 发表时间:2017-11-17T10:12:37.387Z 来源:《电力设备》2017年第20期作者:李青宁进荣 [导读] 摘要:针对广西玉林网区220kV输电网络中地形复杂、故障类型多样、测距精度不高、巡线困难、难以及时准确定位故障点的情况,通过对已投入运行一年多的SDL-7002电流行波测距装置获取的暂态录波故障数据进行分析,熟悉电流行波测距的原理及特点。 (广西电网有限责任公司玉林供电局广西玉林 537000) 摘要:针对广西玉林网区220kV输电网络中地形复杂、故障类型多样、测距精度不高、巡线困难、难以及时准确定位故障点的情况,通过对已投入运行一年多的SDL-7002电流行波测距装置获取的暂态录波故障数据进行分析,熟悉电流行波测距的原理及特点。装置现场实际运行结果表明,利用电流行波测距原理对故障线路的故障点进行定位的方式,测距精度高、故障点定位准确。 关键词:电流行波;巡线;暂态 0引言 输电线路的故障类型主要分为两类,即瞬时性故障和永久性故障[1]。瞬时性故障占绝大多数,通过重合闸可快速恢复供电,但故障点往往是薄弱点,须尽快找到并加以处理,以避免二次故障危及电力系统的安全稳定运行;对于永久性故障,则须尽快查明故障线路定位故障点并及时排除,故障排除时间的长短直接影响到供电系统的可靠性和系统的安全稳定运行,排除时间越长,停电损失越大,对整个电力系统安全稳定运行的冲击也越大。 1行波测距原理 输电线路故障时故障点会产生向线路两端传播的行波,包括电压行波和电流行波。暂态行波所涵盖的频带很宽,从几百赫兹到几百千赫兹。为了在二次侧装置上很好的观察到线路上的暂态行波信号,要求电压和电流信号的变换回路要有足够快的响应速度。常规的电容式电压互感器截止频率较低,不能真实地传变高频行波信号;而现场电压暂态信号的获取可以通过将一个电感线圈串入CVT的接地导线中来抽取线路电压暂态信号,或者采用专门研制的行波传感器来耦合线路侧CVT接地导线上的电流暂态信号,从而间接的反映线路电压暂态信号[4-5]。分析表明,直接采集电流互感器二次侧的电流信号比通过各种耦合设备采集电压或者电流暂态信号更具有优越性。 电力线路发生故障时,由于故障点电压的突变,在线路上将出现电弧暂态行波过程,故障暂态行波过程可以利用叠加原理来分析。根据叠加原理,在故障瞬间,相当于在故障点突然附加一个与故障前电压大小相等、方向相反的虚拟电源,如图2-1所示。故障暂态行波过程的波源就是此突然并与故障点的附加电压源。该附加电压源产生的初始行波浪涌将以接近光速的速度向两个方向传播,并在故障点和系统中,在其他波阻抗不连续的点之间来回反射和折射,直到进入稳态[6]。 图2-1 初始行波产生示意图 2 测距系统的硬件实现要求 输电线路行波故障测距法早期利用电子计数器或者阴极射线示波器来测量暂态行波的到达时刻和传播时间。随着现代微电子技术在行波测距系统中的应用,使得对电压和电流暂态信号的高速采集和大容量存储成为可能;GPS技术在电力系统中的应用为测距系统提供了可用的时钟源基础;现代通信技术的应用为现代行波测距系统提供了通信保障;DSP技术的应用则促进了各种实时高性能行波故障测距算法的发展。 3现场测距案例 2014年7月11日14时12分10秒,220kV雄陆线发生C相单相接地故障,装设在陆川站和雄鹰站的电流行波测距装置成功测得故障点距离陆川站17.482km(实际位于17.662km),距离雄鹰站10.638km(实际为10.458km),双端测距误差为0.18km; 本文以雄陆线发生的故障数据为例,对SDL-7002采集到的电流行波数据进行故障点分析。双端测距中只需利用其两侧的首波头进行双端测距,无须对后续的反射波等干扰叠加后的波形进行分析。 根据录波文件中的绝对时间,计算得到双端测距结果为距陆川站17.482km(实际17.662km),距雄鹰站10.638km(实际10.458km),双端测距误差为0.18km。 综上所述,双端测距由于不考虑后续故障点的反射波、对端及相邻线路母线的反射波等因素的影响,只对故障点产生的首波头进行数据的分析和测距,因而测距分析相对简单。而对于单端测距来说,由于故障点位置、现场接线方式以及故障类型等的不同,单端波形差异性很大,无法保证现场测距的实用性和可靠性,在现场实际应用中单端测距方法往往作为双端测距的补充方法使用。 4结论 基于电流行波测距原理的行波测距方法具有不需要额外附加耦合设备、不受互感器截至频率影响等特点,测距速度快,现场操作方便,易于实现。通过对现场装设的SDL-7002电流行波测距装置在实际运行中的录波数据的分析表明,电流行波测距可靠性高、故障点定位准确。在电流行波测距算法中,双端测距算法不受现场接线方式、不考虑后续反射波等的影响,测距准确,而单端测距方法容易受故障类型、现场接线方式等因素的影响,实际运行中单端测距常作为双端测距的补充加以使用。 参考文献: [1]何骏.基于B/S模式的行波测距系统在地区电网中的应用[D],山东大学硕士学位论文,2009. [2]吴刚,林湘宁.通用行波测距修正方法[J],中国电机工程学报.2011,31(34):142-149.术.2010,34(1):203-207. [3]郑州,吕艳萍,王杰,吴凡.基于小波变换的双端行波测距新方法[J],电网技术.2010,34(1):203-207.
相位法激光测距的理论设计综合最新版
相位法激光测距的设计 电子工程学院 詹雪娇 2017110459 史歌2017110481
第一章引言 激光,是一种自然界原本不存在的,因受激而发出的具有方向性好、亮度高、单色性好和相干性好等特性的光。物理学家把产生激光的机理溯源到1917年爱因斯坦解释黑体辐射定律时提出的假说,即光的吸收和发射可经由受激吸收、受激辐射和自发辐射三种基本过程[1]。 所谓激光技术,就是探索开发各种产生激光的方法以及探索应用激光的这些特性为人类造福的技术的总称。30多年来,激光技术得到突飞猛进的发展,利用激光技术不仅研制了各个特色的多种多样的激光器,而且随着激光应用领域不断拓展,形成了激光唱盘唱机、激光医疗、激光加工、激光全息照相、激光照排印刷、激光打印以及激光武器等一系列新兴产业。激光技术的飞速发展,使其成为当今新技术革命的先锋! 激光和普通光的根本不同在于它是一种有很高光子简并度的光。光子简并度可以理解为具有相同模式(或波型、位相、波长)的光子数目,即具有相同状态的光子数目。这些特性使激光具有良好的准直性及非常小的发散角,使仪器可进行点对点的测量,适应非常狭小和复杂的测量环境。激光测距仪就是利用激光良好的准直性及非常小的发散角度来测量距离的一种仪器。激光在A、B 两点间往返一次所需时间为t, 则A、B 两点间距离D 可表示为: D = c·t /2,式中, c为光在大气中传播的速度。由于光速极快, 对于一个不太大的D 来说, t是一个很小的量。如:假设D =15km, c = 3 ×105 km / s,则t = 5 ×10- 5 s。由测距公式可知,如何精确测量出时间t的值是测距的关键。 由于测量时间t的方法不同,便产生了两种测距方法:脉冲测距和相位测距。其中相位测距更加精确[1]。
一种手持式激光测距仪的电路设计
设计天地 Design Field 引言 该测距仪利用测量调制的激光信号相位差进行距离的测量。为了提高精度,采用高速时钟利用数字方式进行相位测量。使用单片机技术实现人机接口和数据运算。 该系统采用单片机加CPLD的设计方法, CPLD主要进行地址译码、鉴相、时钟分频等功能,单片机采用最常用的AT89C51,主要完成运算和人机接口。 设计思路 该测距仪利用反射方式进行测量。测距仪发射经过调制的激光信号到达目的地,经目的地反射后回到仪器,仪器计算出信号从发送到接收的时间差,再和激光信号的速度进行相乘。得到信号经过的总距离。 由此可得到测距基本公式为: 假设仪器发射角频率为ω的正弦波,经反射器反射回测试设备,被仪器的接收系统接收。收到的正弦信号在相位上和发射的正弦信号相比较,有一个相位差Φ。 发射信号为:u=Vmsin(ωt+φ0) 其中Vm为振幅,ω为角频率,t为时间,φ0为初相位。 经反射后回到设备的正弦信号不考虑其振幅变化u=Vmsin(ωt-ωt2D+φ0) 其中,ωt2D就是正弦波在二倍距离上传播所引起的相位变化: Φ=ωt2D 将其带入测距基本公式,可得到: 式中: c——电磁波在真空中的传播速度;f——电磁波的频率;n——大气的折射率; Φ——电磁波在被测距离上往返传播的相位差。因此,只要计算出信号从发送到接收的相位差就可以求出设备与被测点之间的距离。 该设备需要测量100m距离,我们选用150m作为设备的测程范围。并取混频时中频F中=10KHz。用 40MHz时钟对混频后10KHz信号进行采样。由下式 c=f×λ和 L=λ/2可得(40MHz/10KHz=4000): 令L1=150m, 可得λ=300m,c=3×108m/s,计算得F1=1.0×106Hz。L1最小=300/4000=0.075m。 令L2=7.5m,可得λ=15m,c=3×108m/s,计算得F2 =20×106Hz。L2最小=15/4000=0.00375m。 由以上计算可得,选择F1=1MHz,F2=20MHz可符一种手持式激光测距仪的电路设计 The Circuit Design of A Laser Range Finder 西安邮电学院继续教育学院 高敏西安深亚电子有限公司 王建锋 摘 要:本文介绍了一种以单片机和CPLD为核心的测距仪的电路设计。该电路用高速时钟进行数字鉴相、测量, 省去了模数转换,利用软硬件相结合的方式,提高了测量精度,缩短了测量时间。 关键词:激光测距;数字鉴相
沃德W2000狙击步枪
沃德W2000狙击步枪 狙击步枪之最-瓦尔特(Walther)W2000 基本介绍 中文名:沃德W2000 英文: Walther W2000 类型:狙击步枪 德国卡尔·瓦尔特运动枪有限公司(Carl Walther GmbH Sportwaffen)公司生产的瓦尔特(Walther) W2000 狙击步枪,可以说是迄今为止世界上最好的狙击步枪,精确度世界第一.各国职业狙击手的梦寐以求的武器.全世 界只有72把.每把价值九万美金左右.[1] 设计特色 W2000最初是瓦尔特公司为奥运会射击比赛设计的,精确度可想而知.但是由于价格过于昂贵,没有得到普及.瓦尔特公司一共生产了72只,有三种不同的口径: .300 温彻斯特玛格南口径(Winchester Magnum),7.62mm 北大西洋公约组织口径(NATO)和7.5x51mm瑞士口径.最普遍的是 .300温 彻斯特玛格南口径,W2000最初的设计口径. .300温彻斯特玛格南弹是最精准的子弹,有超群的表现,尤其是远距离的精度和一致性.每一颗子弹都能 保证相同的质量. W2000是半自动无托设计,非常轻便紧凑.全枪只有90.5厘米(35.62英寸)长.由于是无托设计,W2000竟然有一跟65厘米(26英寸)的枪管.相比之下,美国的M24狙击步枪的枪管比它还短了8厘米,而全枪长了20多厘米. W2000使用闭锁式枪机,为了提高射击精度,使用了7个闭锁(一般的枪只有两个).整把枪都是围绕着超精准的枪管设计的.为了维修方便,整个击发装臵(包括扳机,枪击,弹夹等)都能从枪的下方退出. 每把W2000都配有史密特奔德(Schmidt&Bender)2.5-10x56mm狙击镜.至于材料那就不用说了,全部是最最好的材料.当然了,再好的枪也难免有暇漏: 一是枪管过热 的时候,射击精确度明显下降.二是重量有7公斤左右,超过一般步枪的重量.至于枪的优点,那就太多了.最明显的优点有两个:奥运会射击冠军般的准 度和连续射击时几乎感觉不到的后座力.
管道流量测量方法
管道流量测量方法 [技术摘要]一种管道流量称及测量方法,属流量测量技术领域。用于解决测量管道内混合流体的质量流量及质量浓度的技术问题。其特别之处是:构成中包括换能器、超声波流量计、压力变送器、称量传感器、智能显示仪和称量管,称量管至少配置一个称量传感器,在称量管的两端各设有一段波纹管与其形成挠性连接,两波纹管的另一端分别连通前后固定管,前后固定管分别连通流体输送管道,前后固定管固定在基础支架上,所述压力变送器和换能器均设置在流体输送管道上,各测量元件连接智能显示仪。本发明所提供的管道流量称及测量方法,解决了管道中高温介质、粘稠液体、煤粉、水煤浆等混合流体质量流量与质量浓度的测量难题,其理论依据可靠、测量值准确、结构合理、易于实现。 气体质量流量上下游温度分布二次差动测量方法、传感器、及流量计 [技术摘要]本发明涉及一种气体质量流量上下游温度分布二次差动测量方法、传感器、及流量计。包括加温元件,对称设置在加温元件两侧的温度检测元件,即上游温度检测元件和下游温度检测元件,其特征在于所述的加温元件与恒功率源激励相连,上
游温度检测元件和下游温度检测元件分别与差动运算电路的两个信号输入端相连,所述的差动运算电路的输出端连接有中央处理单元。具有如下优点:通过对上下游温度变化差值进行二次差动运算,保证对低速段线性度影响较小;气体质量流量的流速和输出电压的关系曲线的饱和点往后推,量程扩大,提高了量程范围和线性度;测量精度高,灵敏度高;采用MEMS技术实现了低功耗、高频响,大幅降低芯片的热惯性。 [9-BG95212]联合式湿蒸汽流量、干度测量装置及其测量方法 [技术摘要]本发明公开了一种联合式湿蒸汽流量、干度测量装置及其测量方法,该装置由经过标定的标准孔板、经典文丘利管作为一次测量元件,高精度压力传感器、智能型差压变送器转换并传输标准信号,标准4~20mA信号经I/V转换成1~5V电压信号,进入高速数据采集卡,最后在中央处理器中根据压力信号调用汽、水性质的IAPWS-IF97计算公式模块计算出饱和水、饱和蒸汽的密度及比焓、汽化潜热,从而算出湿蒸汽的干度、质量流量、载热量,同时对质量流量、载热量进行累积运算,重要参数适时存储于数据库,作为历史数据以备后期调用,系统通过D/A通道输出干度、累积流量,供中央处理器使用,本发明与以往的IF-67计算公式相比计算精度提高10倍以上,且重复计算精度高,而运算速度提高4~12倍。
激光测距仪原理
激光测距仪激光测距基本原理 激光测距是光波测距中的一种测距方式,如果光以速度c在空气中传播在A、B两点间往返一次所需时间为t,则A、B两点间距离D可用下列表示。 D=ct/2 式中:D——测站点A、B两点间距离;c——光在大气中传播的速度;t——光往返A、B 一次所需的时间。 由上式可知,要测量A、B距离实际上是要测量光传播的时间t,根据测量时间方法的不同,激光测距仪通常可分为脉冲式和相位式两种测量形式。 相位式激光测距仪 相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。即用间接方法测定出光经往返测线所需的时间。 相位式激光测距仪一般应用在精密测距中。由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。 若调制光角频率为ω,在待测量距离D上往返一次产生的相位延迟为φ,则对应时间t 可表示为: t=φ/ω 将此关系代入(3-6)式距离D可表示为 D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ) =c/4f (N+ΔN)=U(N+) 式中:φ——信号往返测线一次产生的总的相位延迟。 ω——调制信号的角频率,ω=2πf。 U——单位长度,数值等于1/4调制波长 N——测线所包含调制半波长个数。 Δφ——信号往返测线一次产生相位延迟不足π部分。 ΔN——测线所包含调制波不足半波长的小数部分。 ΔN=φ/ω
在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。 为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。 由上所述一般情况下相位式激光测距仪使用连续发射带调制信号的激光束,为了获得测距高精度还需配置合作目标,而目前推出的手持式激光测距仪是脉冲式激光测距仪中又一新型测距仪,它不仅体积小、重量轻,还采用数字测相脉冲展宽细分技术,无需合作目标即可达到毫米级精度,测程已经超过100m,且能快速准确地直接显示距离。是短程精度精密工程测量、房屋建筑面积测量中最新型的长度计量标准器具。
SW-50A手持式激光测距仪操作规程
1. 目的 1.1 规范SW-50A手持式激光测距仪操作程序,正确使用仪器,保证检测工作顺利 进行。 2. 范围 2.1 本规程适用于SW-50A手持式激光测距仪的使用操作。 3. 职责 3.1 操作人员按照本操作规程使用仪器,并进行日常维护。 3.2 保管人员负责监督仪器操作是否符合规程,并对仪器进行定期维护保养。 4. 规程 4.1安装更换电池 打开仪器背面的电池门,按照极性指示正确放入电池,并关闭电池门。 仪器能使用1.5V AAA的碱性电池或标配3.7V 850mAh锂电池。 长时间不使用仪器时请取出电池以避免电池腐蚀仪器主机。 4.2启动仪器及功能设置 ●启动仪器和关闭仪器 关机状态下,按键,仪器启动,仪器进入待测模式。 开机状态下长按键3秒关闭仪器。150秒内未对仪器进行任何操作,仪器将 自动关闭。 ●单位设定 在长度待测模式下,长按键,进入测量单位调整状态,可重置当前测量单位, 该仪器提供了6种单位可供选择。 ●测量基准设置 短按基准键进行设计前端基准、中端基准和末端基准的相互转换,系统默认 为末端基准。 ●延时测量 长按基准键开启延时测量模式,延时时间为5秒,可按键进行时间调 整。按键开始倒计时,倒计时结束开始测量。 ●背光灯开启/关闭
本仪器背光灯为自动开和关。仪器在键入任一按键后,背光灯会持续打开15 秒,15秒后,仪器无任何操作将自动关闭背光灯以节省电源。 ●声音的开启/关闭 短按键,关闭语音功能,仪器提示“语音关”,再短按键,开启语音功能, 仪器提示“语音开”。 4.3自动校准功能 校准方法:在关机状态下,同时按住键和键,直到屏幕出现‘CAL’,下端 有闪烁的数字,进入自助校准模式。 可根据仪器的误差用键对这个数值进行调整。调整范围为-9~9mm 例如:实际距离为3.780m 若本机测量值为3.778m,比实际值小2mm,则可进入校准模式,用键将校准值 在现有基础上上调2mm。 若本机测量值为3.783m,比实际值大3mm,则可进入校准模式,用键将校准值 在现有基础上下调3mm。 调整完毕后,按键保存校准结果。 4.4测量 ●单次测量 待测模式下按键,仪器激光发射,锁定测量点。再按键进行单次距离数据的 测量,测量结果显在主显示区 ●连续测量 待测模式下长按键,进入连续测量状态,屏幕上辅助显示区会显示此次连续测 量过程中的最大测量值和最小测量值。 主显示区会显示当前测量值,短按键或者键退出连续测量模式。 ●面积测量 按键一次,屏幕会显示,长方形一条边闪烁。 根据提示完成下列操作: 按键进行第一条边的测量(长) 按键进行第二条边的测量(宽) 仪器会自动进行面积运算,结果显示在主显示区。辅助显示区显示长方形的长 和宽的测量值。 在测量过程中,还可以键入清除本次测量结果重新测量。
行波测距法
行波法故障测距 行波法的研究始于本世纪四十年代初,它是根据行波传输理论实现输电线路故障测距的。现在行波法已经成为研究热点。 行波法的研究始于二十世纪四十年代初,它是根据行波传输理论实现输电线路故障测距的。现在行波法已经成为研究热点。 简介 (1)早期行波法 按照故障测距原理可分为A,B,C 三类: ① A 型故障测距装置是利用故障点产生的行波到达母线端后反射到故障点,再由故障点反射后到达母线端的时间差和行波波速来确定故障点距离的。但此种方法没有解决对故障点的反射波和对侧母线端反射波在故障点的透射波加以区分的问题,所以实现起来比较困难。 ② B 型故障测距装置是利用记录故障点产生的行波到达线路两端的时间,然后借助于通讯联系实现测距的。由于这种测距装置是利用故障产生后到达母线端的第一次行波的信息,因此不存在区分故障点的反射波和对侧母线端反射波在故障点的透射波的问题。但是它要求在线路两端有通讯联系,而且两边时标要一致。这就要求利用GPS 技术加以实现。 ③ C 型故障测距装置是在故障发生后由装置发射高压高频或直流脉冲,根据高频脉冲由装置到故障点往返一次的时间进行测距。这种测距装置原理简单,精度也高,但要附加高频脉冲信号发生器等部件,比较昂贵复杂。另外,测距时故障点反射脉冲往往很难与干扰相区别,并且要求输电线路三相均有高频信号处理和载波通道设备。 比较 三种测距原理的比较:A 型和 C 型测距原理属于单端测距,不需要线路两端通信,因都需要根据装置安装处到故障点的往返时间来定位,故又称回波定位法;而 B 型测距原理属于双端通讯, 需要双端信息量。A 型测距原理和 B 型测距原理适用于瞬时性和持久性故障,而C 型测距原理只适用于持久性故障。 (2)现代行波法 从某种意义上讲,现代行波法是早期A 型行波法的发展。60年代中期以来,人们对1926年提出的输电线路行波传输理论行了大量的深入的研究,在相模变换、参数频变和暂态数值计算等方面作了大量的工作,进一步加深了对行波法测距及诸多相关因素的认识。 1)行波相关法 行波相关法所依据的原理是向故障点运动的正向电压行波与由故障点返回的反向电压行波之间的波形相似,极性相反,时间延迟△ t 对应行波在母线与故障点往返一次所需要的时间。对二者进行相关分析,把正向行波倒极性并延迟△ t 时间后,相关函数出现极大值。 这种方法也存在对故障点的反射波和对侧母线端反射波在故障点的透射波加以区分的问题。由于在一些故障情况下存在对侧端过来的透射波,它们会与故障点发生的反射波发生重叠,从而给相关法测距带来很大困难。 2)高频行波法 高频行波法与其他行波法不同的是,它提取电压或电流的高频行波分量,然后进行数字信号处理,再依据 A 型行波法进行故障测距。这种方法根据高频下母线端的反射特性,成功的区分了故障点的反射波和对侧母线端反射波在故障点的透射波。 (3)利用行波法测距需要解决的问题 行波法测距的可靠性和精度在理论上不受线路类型、故障电阻及两侧系统的影响,但在实际中则受到许多工程因素的制约。 1)行波信号的获取 数字仿真表明:故障时线路上的一次电压与电流的行波现象很明显,包含丰富的故障信息,但需要通过互感器进行测量。关键是如何用一种经济、简单的方式从互感器二次侧测量到行波信号。一般来说,电压和电流的互感器的截止频率要不低于10khz,才能保证信号不过分失真。用于高压输电线路的电容式电压互感器(CVT)显然不能满足要求。利用故障产生的行波的测距装置,最好能做到与其他的线路保护(如距离保护)共用测量互感
吃鸡狙击步枪武器大全 AWM威力远超98K
吃鸡狙击步枪武器大全 AWM威力远超98K成为最强狙击 绝地求生大逃杀游戏中有很多狙击枪,常见的有98k、sks等等狙击,下面游戏吧小编为大家带来绝地求生大逃杀狙击步枪武器大全,快来了解一下吧! 第七名第六名第五名第四名吃鸡狙击步枪武器大全 AWM威力远超98K成为最强狙击" src="https://www.wendangku.net/doc/727609019.html,/uploadfile/2017/1027/20171027104835439.jpg" /> VSS MINI14 SKS MK14 EBR VSS是一种使用重型亚音速 9毫米子弹的消声狙击枪。 Semi-auto carbine. 半自动俄罗斯精准射手步枪 Selective fire Designate Marksman Rifle originally built for use with units of USSOC such as Navy SEALs and Delta Force 总览VSS 总览MINI14 总览SKS 总览MK14 38 44 55 60 命中伤害命中伤害命中伤害命中伤害330 990 800 853 初始子弹速度初始子弹速度初始子弹速度初始子弹速度 20,000 10,000 20,000 20,000 击中身体冲击力击中身体冲击力击中身体冲击力击中身体冲击力 100 - 100 100 - 600 100 - 800 100 - 800 归零距离归零距离归零距离归零距离 10 20 10 10 弹匣容量弹匣容量弹匣容量弹匣容量 0.086s 0.100s 0.090s 0.090s 射击间隔射击间隔射击间隔射击间隔单发, 自动单发单发 单发, 自动射击模式射击模式射击模式射击模式重填VSS 重填MINI14 重填SKS 重填MK14 弹匣 弹匣弹匣弹匣方法方法方法方法 3.500s 3.600s 2.900s 3.683s 持续时间(填满)持续时间( 填满)持续时间(填满)持续时间(填满) 2.583s 2.700s 2.350s 2.783s 持续时间(战略)持续时间(战略)持续时间(战略)持续时间(战略) - - - - 持续时间(单发子弹)持续时间(单发 子弹)持续时间(单发子弹)持续时间(单发子弹) - - - - 持续时间(单发子弹重复)持续时间( 单发子弹重复)持续时间(单发子弹重复)持续时间(单发子弹重复)散射VSS 散射MINI14 散 射SKS 散射MK14 7 5 7 7 基础基础基础基础 0.15 0.15 0.15 0.15 瞄准修正瞄准修正瞄准修正瞄更多精彩攻略访问https://www.wendangku.net/doc/727609019.html,1
几种常用流量计的基础知识
几种常用流量计的基础知识 流量测量是四大重要过程参数之一(其他的是温度、压力和物位)。闭合管道流量计以其采用的技术分类,如下: 差压流量计(DP) 这是最普通的流量技术,包括孔板、文丘里管和音速喷嘴。DP流量计可用于测量大多数液体、气体和蒸汽的流速。DP流量计没有移动部分,应用广泛,易于使用。但堵塞后,它会产生压力损失,影响精确度。流量测量的精确度取决于压力表的精确度。 容积流量计(PD) PD流量计用于测量液体或气体的体积流速,它将流体引入计量空间内,并计算转动次数。叶轮、齿轮、活塞或孔板等用以分流流体。PD流量计的精确度较高,是测量粘性液体的几种方法之一。但是它也会产生不可恢复的压力误差,以及需装有移动部件。 涡轮流量计 当流体流经涡轮流量计时,流体使转子旋转。转子的旋转速度与流体的速度相关。通过转子感受到的流体平均流速,推导出流量或总量。涡轮流量计可精确地测量洁净的液体和气体。像PD流量计,涡轮流量计也会产生不可恢复的压力误差,也需要移动部件。 电磁流量计 具有传导性的流体在流经电磁场时,通过测量电压可得到流体的速度。电磁流量计没有移动部件,不受流体的影响。在满管时测量导电性液体精确度很高。电磁流量计可用于测量浆状流体的流速。 超声流量计 传播时间法和多普勒效应法是超声流量计常采用的方法,用以测量流体的平均速度。像其他速度测量计一样,是测量体积流量的仪表。它是无阻碍流量计,如果超声变送器安装在管道外测,就无须插入。它适用于几乎所有的液体,包括浆体,精确度高。但管道的污浊会影响精确度。 涡街流量计 涡街流量计是在流体中安放一根非流线型游涡发生体,游涡的速度与流体的速度成一定比例,从而计算出体积流量。涡街流量计适用与测量液体、气体或蒸汽。它没有移动部件,也没有污垢问题。涡街流量计会产生噪音,而且要求流体具有较高的流速,以产生旋涡。 热质量流量计 通过测量流体的温度的升高或热传感器降低来测量流体速度。热式质量流量计没有移动部件或孔,能精确测量气体的流量。热质量流量计是少数能测量质量流量的技术之一,也是少数用于测量大口径气体流量的技术。 科里奥利流量计 这种流量计利用振动流体管产生与质量流量相应的偏转来进行测量。科里奥利流量计可用于液体、浆体、气体或蒸汽的质量流量的测量。精确度高。但要对管道壁进行定期的维护,防止腐蚀。
手持测距仪使用说明书
1.先要给激光测距仪装上电池,对于那些可以直接充电的激光测距仪,我们在使用前要先把电充满。 2.每一个激光测距仪上都会有一个开关电源,有的是通过轻按“发射键”,测距仪内部电源就可以打开,通过目镜可看见测距仪处于待机状态。 3.打开电源后,在测量前,我们还要选择好单位,操作方法是长按“模式键”,就可以直接选择你要选择的单位了。 4.一切准备工作都做好之后,我们可以通过测距仪目镜中的“内部液晶显示屏”瞄准被测物体,注意手不要抖动,这样可以减小误差,测量结果会更准确。 5.确定描准之后,轻按“发射键”,这时测量的距离就会显示在“内部液晶显示屏”上,我们可以记下这个数值,如果担心测量不准确,可以多测几次。 6.在瞄准被测物体时,如果感觉被测物体不是很清晰,我们可以通过“+/-2屈光度调节器”来调节被测物体远近的清晰度,可以通过顺转或逆转来调节远近,以达到最理想的清晰度。 注:各种品牌各种型号可能会有所差异,但基本使用方法都是大同小异,看看说明书应该操作都不会有问题。 扩展资料: 手持式测距仪,是根据利用电磁波学、光学、声学等原理且具有
小巧机身,用于距离测量的仪器。 原理:手持式测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。 一般采用两种方式来测量距离:脉冲法和相位法。脉冲法测距的过程是这样的:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间。光速和往返时间的乘积的一半,就是测距仪和被测量物体之间的距离。脉冲法测量距离的精度是一般是在+/- 1米左右。另外,此类测距仪的测量盲区一般是15米左右。
雪崩光电二极管在相位式激光测距仪中的应用
可编程器件应用 电 子 测 量 技 术 EL ECTRONIC M EASUREM EN T TEC HNOLO GY 第30卷第2期2007年2月 雪崩光电二极管在相位式激光测距仪中的应用 孙懋珩 丁 燕 (同济大学电子与信息工程学院 上海 200092) 摘 要:雪崩光电二极管作为光敏接收器件,特别适合用于微弱信号的接收检测,它在相位式激光测距系统中用来接收经过漫反射后微弱的激光信号。针对雪崩二极管反向偏压电路中高纹波的问题,本文设计和分析了一种高效的低纹波偏压电路,实验结果表明,该方法有效抑制了纹波电压。针对雪崩二极管温度漂移的问题,本文设计和分析一种新型的温度补偿电路,使雪崩二极管达到了最佳雪崩增益。针对雪崩二极管噪声问题,分析了主要噪声源,设计了一个低噪声的前置放大电路,实验结果表明,该电路有效地提高了信噪比。综合实验结果表明,这些电路设计对于提高相位式激光测距仪的测量精度是有效的。 关键词:雪崩光电二极管;相位式激光测距;纹波;温度补偿;前置放大电路 中图分类号:TN710.2 文献标识码:A Study on application of avalanche photodiode in phase laser distance measurement Sun Maoheng Ding Yan (School of Electronic and Information Engineering,Tongji University,Shanghai200092) Abstract:As a light2sensitive device,avalanche photodiode is particularly suitable for the receiving and detection of weak signal.Therefore,it is always used to receive weak laser signal in the phase laser distance measuring system.To solve the problem of high ripple in the bias voltage circuit,a high efficient circuit with low ripple is designed and analyzed which restrains the ripple effectively.To solve the problem of temperature drift,a new circuit with temperature compensation is designed and analyzed which enables A PD to reach the optimal avalanche gain.To solve the problem of noise,the major noises of A PD are analyzed and a preamplifier circuit with low noise is designed which raise the signal2 to2noise ratio effectively.The results of the experiment indicate that these circuit designs raise the measuring accuracy of the phase laser distance measuring system effectively. K eyw ords:avalanche photodiode;phase laser distance measurement;ripple;temperature compensation;preamplifier 0 引 言 在相位式激光测距仪的激光接收部分中,雪崩二极管作用非常关键。在激光测距仪中,激光从发射到接收,由于经过目标的漫反射以及衰减,接收到的激光信号非常微弱,使得接收检测相对较为困难,所以一般都用雪崩光电二极管作为光敏接收器件[1]。雪崩二极管具有很高的内部增益,响应速度非常快,但要使雪崩二极管发挥其优异的特性,必须给它提供一个较高的反向偏置电压(一般在几十伏以上甚至几百伏。一般的开关电源可以达到这么高的电压要求,但伴随着会有相对较大纹波电压,电源的纹波电压变化范围越大,对雪崩二极管的影响就越大,它会严重影响到雪崩二极管的最佳增益。针对这一情况,本文提出的一种高效的低纹波偏压电路是通过从高压输出端引出一个反馈电路,直接反馈到高压电路的电源端,通过改变电源电压来改变高压输出。在实验中测得的输出高压的纹波与之前未经低纹波设计的高压电路相比,纹波电压得到了很好的抑制。对于雪崩二极管来说,一个小小的温度变化就能引起增益的很大变化,为了保证温度变化时增益值不变,就必须改变PN结倍增区的电场,因此必须接入一个温度补偿电路,在温度变化时来调整光检测器的偏置电压。本文设计了一个新型的温度补偿电路,用一个模拟温度传感器及一个运放,通过简单的计算公式进行参数配置,最终得出一条与A PD最佳增益非常匹配的反向高压输出曲线。雪崩二极管在倍增过程中产生的附加噪声会大大降低测量的性能,为达到最大信噪比,提高相位式激光测距仪的测量精度,本文对其噪声进行了分析并且设计了一个有效的前置放大电路。实验结果表明,该电路有效地提高了信噪比。将这些电路在相位式激光测距仪接收模块中应用,结果表明,它们对于提高相位式激光测