基于键合图及Simulink的换管机回转液压系统动态仿真分析_王丹

收稿日期:2009-11-06;修订日期:2010-01-03
基金项目:陕西省自然科学基金项目(2007E 218);陕西省教育
厅自然科学专项(09J K559).
作者简介:王丹(1984-),女,西安建筑科技大学硕士研究生。
基于键合图及S imu link 的换管机回转液压系统动态仿真分析
王 丹1
,原思聪1
,王晓瑜1
,李志远
2
(1 西安建筑科技大学机电工程学院,陕西 西安 710055;
2 重庆宜康实业有限公司,重庆 401147)
摘 要:采用功率键合图法,建立了地下管线液压换管机回转液压系统的数学模型;依据数学模型,运用动态仿真工具S i m u link 建立液压系统的仿真模型。仿真结果反映了液压马达入口压力和输入流量随时间的变化情况,为分析系统的动态特性提供了依据。
关键词:功率键合图;液压系统;数学模型;
S i m u li nk
中图分类号:TH 137,T P391 9 文献标识码:A 文章编号:
1001-196X (2010)01-0015-03
Dyna m ic si m ulation analysis of the sle w ing hydraulic syste m of
pipeline replace m entm achines based on bond graph and Si m ulink
WANG D an 1
,YUAN S -i cong 1
,WANG X iao -yu 1
,L I Zh-i yuan
2
(1 Schoo l o fM echanical and E lectr i ca l Eng i neer i ng ,X i an U ni v ers it y o f A rch itecture and T echnology ,X i an 710055,Ch i na ;2 Chongq i ng Y ikang Indutr ial Co .,L td .,Chongqi ng 401147,Ch i na)
Ab stract :The m at hema ti ca l model of t he sle w i ng hydrau lic syste m of pipe line replacem ent machines tha t i s used to rep l ace underg round p i peli nes has been establi shed w ith the pow er bond graph me t hod ,
and the si m u l a -ti on model of the hydrau lic syste m by usi ng the dyna m i c si m ulati on tool S i m u li nk has been bu ilt based on m athe -m ati ca lm ode ls .Si m ulati on results refl ec ted the change o f t he i nlet pressure and input flow o f t he hydrauli c mo -t o r w it h ti m e ,
and prov ided a favorab l e basis f o r the analysis o f the dynam ic character istics o f the syste m.
K ey words :po w er bond g raph ;hydraulic syste m;m a t he m atical mode;l s i m u li nk
1 引言
研究液压系统的动态特性需要考虑其非线性因素。因此采用古典控制理论中的传递函数法对液压系统进行动态特性分析具有一定局限性。功率键合图法是一种处理多种能量范畴的工程系统动态分析法
[1]
,能够考虑系统中的非线性因素。
用图形方式描述系统中各元件间的相互关系,反映元件间的负载效应及系统中功率流动情况,表
示出与系统动态特性有关的信息[2]
。Si m u li n k
(Dyna m ic Syste m S i m u lation )是一个支持线性和非线性系统的动态系统建模、仿真和综合分析的软件包,它提供了一个建立模型方块图的图形用户接口,可以立即看到系统的仿真结果
[3]
。
2 液压系统工作原理
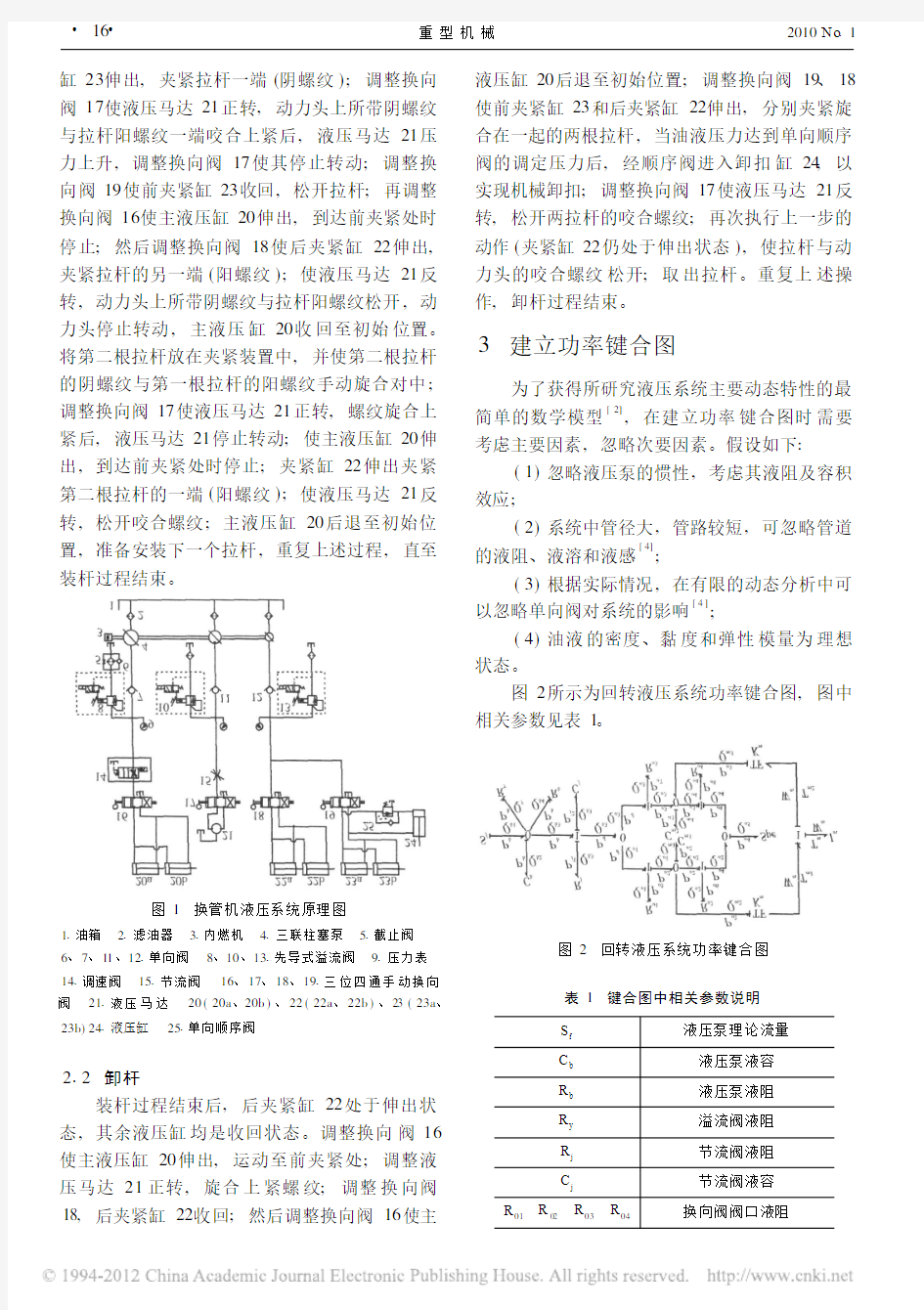
本文以更换地下管线的换管机的回转液压系统为例,对其进行动态仿真分析。图1为换管机液压系统原理图。2 1 装杆
初始状态下,各换向阀均处于中位,各液压缸均为收回状态。当系统建立压力时,将第一根拉杆放入夹紧装置中,调整换向阀19使前夹紧
15 2010No 1 重型机械
缸23伸出,夹紧拉杆一端(阴螺纹);调整换向阀17使液压马达21正转,动力头上所带阴螺纹与拉杆阳螺纹一端咬合上紧后,液压马达21压力上升,调整换向阀17使其停止转动;调整换向阀19使前夹紧缸23收回,松开拉杆;再调整换向阀16使主液压缸20伸出,到达前夹紧处时停止;然后调整换向阀18使后夹紧缸22伸出,夹紧拉杆的另一端(阳螺纹);使液压马达21反转,动力头上所带阴螺纹与拉杆阳螺纹松开,动力头停止转动,主液压缸20收回至初始位置。将第二根拉杆放在夹紧装置中,并使第二根拉杆的阴螺纹与第一根拉杆的阳螺纹手动旋合对中;调整换向阀17使液压马达21正转,螺纹旋合上紧后,液压马达21停止转动;使主液压缸20伸出,到达前夹紧处时停止;夹紧缸22伸出夹紧第二根拉杆的一端(阳螺纹);使液压马达21反转,松开咬合螺纹;主液压缸20后退至初始位置,准备安装下一个拉杆,重复上述过程,直至
装杆过程结束。
图1 换管机液压系统原理图
1 油箱
2 滤油器
3 内燃机
4 三联柱塞泵
5 截止阀6、7、11、12 单向阀 8、10、13 先导式溢流阀 9 压力表14 调速阀 15 节流阀 16、17、18、19 三位四通手动换向阀 21 液压马达
20(20a 、20b )、22(22a 、22b )、23(23a 、
23b)24 液压缸 25 单向顺序阀
2 2 卸杆
装杆过程结束后,后夹紧缸22处于伸出状态,其余液压缸均是收回状态。调整换向阀16使主液压缸20伸出,运动至前夹紧处;调整液压马达21正转,旋合上紧螺纹;调整换向阀18,后夹紧缸22收回;然后调整换向阀16使主
液压缸20后退至初始位置;调整换向阀19、18使前夹紧缸23和后夹紧缸22伸出,分别夹紧旋合在一起的两根拉杆,当油液压力达到单向顺序阀的调定压力后,经顺序阀进入卸扣缸24,以实现机械卸扣;调整换向阀17使液压马达21反转,松开两拉杆的咬合螺纹;再次执行上一步的动作(夹紧缸22仍处于伸出状态),使拉杆与动力头的咬合螺纹松开;取出拉杆。重复上述操作,卸杆过程结束。
3 建立功率键合图
为了获得所研究液压系统主要动态特性的最简单的数学模型
[2]
,在建立功率键合图时需要
考虑主要因素,忽略次要因素。假设如下:
(1)忽略液压泵的惯性,考虑其液阻及容积效应;
(2)系统中管径大,管路较短,可忽略管道的液阻、液溶和液感
[4]
;
(3)根据实际情况,在有限的动态分析中可以忽略单向阀对系统的影响[4]
;
(4)油液的密度、黏度和弹性模量为理想
状态。
图2所示为回转液压系统功率键合图,图中相关参数见表1
。
图2 回转液压系统功率键合图表1 键合图中相关参数说明S f 液压泵理论流量C b 液压泵液容R b 液压泵液阻R y 溢流阀液阻R j 节流阀液阻C j
节流阀液容R 01 R 02 R 03 R 04
换向阀阀口液阻
16 重型机械 2010No 1
C m 1液压马达进口液容C m 2液压马达出口液容I m 负载转动惯量SPe
油箱符号
4 建立数学模型
状态方程是一阶微分方程组,各状态变量都有导数关系,在键合图中只有储能元件(惯性元I 和容性元C )有导数关系,而且储能元件对动态性能起主导作用,因此,一般选取I 元和C 元上自变量的积分为状态变量[2]
。设系统状态变量
为X ,表示如下,
X
1=Q b 2 X
2=Q b 3 X
3=Q m 1 X
4=Q m 4 X
5=T m
依据建立的键合图,并结合规则化的步骤可以方便地推导出系统的状态方程
[5]
。
X
1=S f -X
2-X 1(1/R y +1/R b )/C b
X
2=(1/R o 1+1/R o 3)(X 1/C b -X
2R j -X
2C j )-X 3/C m 1 R o 1-X 4/C m 2 R o 3
X
3=X
2-X
4-X 4/C m 2 R o 4-X 3/C m 1 R o 2X
4=(X 1/C b -X
2R j -X 2/C j -X 4/C m 2)/R o 3+X 5 K m /I m -X 4/C m 2R o 4
X
5=(X 3/C m 1-X 4/C m 2) K m
5 仿真结果
利用MATLAB 中Si m u link 模块库可以直接根据系统的数学模型来创建仿真模型即模型方块图[6]
。根据回转液压系统中各元件的参数值对S i m ulink 仿真模块中各参数进行初始化和赋
值
[7]
,在运行仿真之前,需要设置仿真参数,
本文采用ode45算法,最大步长为0
01s ,仿真时间为1s ,误差控制为10-3
。仿真结果如图3、4所示。
图3 液压马达进口压力
图4 液压马达进口流量
由上述仿真结果可以看出,当换向阀17由中位调整至左位时,液压马达进口压力逐渐增大,1 8s 时压力达到最大值11M Pa (动力头在回转卸扣过程中,拧卸第一扣所需克服的外载荷最大,故液压马达进口压力快速上升),之后压力值逐渐减小,整个过程经5s 液压马达的入口压力稳定在8MPa 。动力头在回转卸扣时,流量逐渐下降,当外部载荷减小时,流量有所上升,最终稳定在1L /s 。
6 结论
采用功率键合图法与MATLAB /Si m ulink ,对回转液压系统进行了动态分析,保留了系统中的非线性因素。获得了动力头在卸扣过程中液压马达的入口压力和输入流量随时间的变化曲线,方便了对液压系统动态特征的分析,为回转液压系统的设计和参数优化提供了理论依据。参考文献:
[1] 任锦堂.键图理论及应用 系统建模与仿真
[M ].上海:上海交通大学出版社,1992.
[2] 李永堂,雷步芳,高雨茁.液压系统建模与仿真
[M ].北京:冶金工业出版社,2003.
[3] 李颖,朱伯立,张威.S i m uli nk 动态系统建模与仿
真基础[M ].西安:西安电子科技大学出版社,2004.
[4] 德兰斯菲尔德.液压控制系统的设计与动态分析
[M ].北京:科学出版社,1987.
[5] 李爱民,李炳文,王启广等.单体液压支柱实验台
的研究[J].液压与气动,2006,(3):21-22.[6] 李战慧,李自光.基于S I M U L I NK 的转运车液压
系统动态特性仿真研究[J].机床与液压,2005,
(7):
169-170.
[7] 孙成通,韩虎.基于功率键合图的液压系统建模
与仿真[J].煤矿机械,
2008,29(3):
52-54.
17 2010No 1
重型机械
注塑结构及工作原理
(一)注塑机结构分析及其工作原理 0…… 一、注塑机的工作原理 注塑成型机简称注塑机。 注塑成型是利用塑料的热物理性质,把物料从料斗加入料筒中,料筒外由加热圈加热,使物料熔融,在料筒内装有在外动力马达作用下驱动旋转的螺杆,物料在螺杆的作用下,沿着螺槽向前输送并压实,物料在外加热和螺杆剪切的双重作用下逐渐地塑化,熔融和均化,当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下,把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用下后退,使螺杆头部形成储料空间,完成塑化过程,然后,螺杆在注射油缸的活塞推力的作用下,以高速、高压,将储料室内的熔融料通过喷嘴注射到模具的型腔中,型腔中的熔料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制品从模具顶出落下。 注塑机作业循环流程如图1所示。 图1 注塑机工作程序框图 二、注塑机的分类 按合模部件与注射部件配置的型式有卧式、立式、角式三种 (1)卧式注塑机:卧式注塑机是最常用的类型。其特点是注射总成的中心线与合模总成的中心线同心或一致,并平行于安装地面。它的优点是重心低、工作平稳、模具安装、操作及维修均较方便,模具开档大,占用空间高度小;但占地面积大,大、中、小型机均有广泛应用。 (2)立式注塑机:其特点是合模装置与注射装置的轴线呈一线排列而且与地面垂直。具有占地面积小,模具装拆方便,嵌件安装容易,自料斗落入物料能较均匀地进行塑化,易实现自动化及多台机自动线管理等优点。缺点是顶出制品不易自动脱落,常需人工或其它方法取出,不易实现全自动化操作和大型制品注射;机身高,加料、维修不便。 (3)角式注塑机:注射装置和合模装置的轴线互成垂直排列。根据注射总成中心线与安装基面的相对位置有卧立式、立卧式、平卧式之分:①卧立式,注射总成线与基面平行,而合模总成中心线与基面垂直;②立卧式,注射总成中心线与基面垂直,而合模总成中心线与基面平行。角式注射机的优点是兼备有卧式与立式注射机的优点,特别适用于开设侧浇口非对称几何形状制品的模具。
懂液压图形符号懂液压系统图
懂液压图形符号懂液压 系统图 文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]
一看懂液压图形符号二看懂液压系统图 (1)液压系统图形符号的构成要素 构成液压图形符号的要素有点、线、圆、半圆、三角形、正方形、长方形、囊形 ●点表示管路的连接点,表示两条管路或阀板内部流道是彼此相通的 ●实线表示主油路管路; ●虚线表示控制油管路; ●点划线所框的内部表示若干个阀装于一个集成块体上,或者表示组合阀,或者表示一些阀都装在泵上控制该台泵。 ●大圆加一个实心小三角形表示液压泵或液压马达(二者三角形方向相反),中●圆表示测量仪表,小圆用来构成单向阀与旋转接头、机械铰链或滚轮的要素,●半圆为限定旋转角度的液压马达或摆动液压缸的构成要素。 ●正方形是构成控制阀和辅助元件的要素,例如阀体、滤油器的体壳等。 ●长方形表示液压缸与阀等的体壳、缸的活塞以及某种控制方式等的组成要素。 ●半矩形表示油箱,囊形表示蓄能器及压力油箱等。 (2)液压图形的功能要素符号 表示功能要素的图形符号有三角形、直与斜的箭头、弧线箭头等。 实心三角形表示传压方向,并且表示所使用的工作介质为液体。泵、马达、液动阀及电液阀都有这种功能要素的实心三角形。
箭头表示液流流过的通路和方向,液压泵、液压马达、弹簧、比例电磁铁等上面加的箭头表示它们是可进行调节的。 弧线单、双向箭头表示电机液压泵液压马达的旋转方向,双向箭头表示它们可以正反转。其他如“W”表示弹簧,“”表示电气,“.L”表示封闭油口,“*”表示节流阻尼小孔等。 (3)其他符号 管路连接及管接头符号、机械控制件和控制方式符号、泵和马达图形符号、液压缸图形符号、各种控制阀(如压力阀、流量阀、方向阀等)图形符号、各种辅助元件的图形符号、检测器或指示器图形符号将在本手册后续的相应内容中分别予以介绍,此处仅举出它们
轮式装载机液压系统设计
开题报告
摘要 装载机主要用来装卸散状物料,也能进行轻度的铲掘工作,并且具有良好的机动性能,是工程机械中保有量较大的品种之一。 装载机液压系统设计是装载机设计的一个重要环节,它对装载机的使用性能和装载机在市场上的竞争力有着很大的影响。装载机性能的优劣和作业效率的发挥,离不开液压系统的设计,而且在很大程度上取决于液压系统的工作效率。 装载机的工作装置和转向机构都采取液压传动,本文通过对工作装置及转向机构工作要求和载荷分析对液压系统进行设计。主要包括对执行元件,控制元件辅助元件的选择、设计。 本文的设计,能够使读者对液压系统设计进一步加深了解,同时从中可以体会到一些设计理念,为以后从事此类工作得到一些帮助。 关键词:装载机液压传动液压系统设计
ABSTRACT The loader is mainly used for loading and unloading bulk materials, but also for light excavation work, and has good maneuverability, is the construction machinery to maintain a larger variety of one. The hydraulic system design of the loader is an important part of the loader design. It has a decisive influence on the performance of the loader and the competitiveness of the loader in the market. The performance of the loader and the operational efficiency of the play, can not be separated from the hydraulic system design, and to a large extent depends on the hydraulic system efficiency. The working device of the loader and the steering mechanism are taken hydraulic drive, this paper through the work device and steering mechanism requirements and load analysis of the hydraulic system design. Mainly include the implementation of components, control components of the selection of components, design. The design of this paper can make the reader to further deepen the understanding of the hydraulic system design, at the same time from which you can experience some of the design concept for the future to engage in such work to get some help. Key words: loader hydraulic transmission hydraulic pressure system
最新直动式溢流阀的键合图建模与仿真分析电子教案
直动式溢流阀的键合图建模与仿真分析 溢流阀一种压力控制阀,在液压设备中主要起定压溢流作用,稳压作用,系统卸荷作用和安全保护作用。系统正常工作时,阀门关闭,只有负载超过规定的极限(系统压力超过调定压力)时开启溢流,进行过载保护,使系统压力不再增加。将直动式溢流阀并联在液压缸的两腔,手动调节溢流压力,可以当做模拟负载器。 1 液压系统及动态过程 任何一个液压元件总是在某一定的液压系统中工作的。在绘制功率键合图,进行动态分析时,总是针对某一具体动态过程进行研究的。 本研究的直动式溢流阀调压系统的液压原理图如图1所示。在图中所示情况下,液压泵的供油经电磁阀流回油箱,当电磁阀突然通电关闭时,直动式溢流阀由原来的关闭状态到打开溢流,直到系统达到新的静平衡状态的瞬态响应过程。 图1 直动式溢流阀调压系统的液压原理图 在上图中,因重点研究的是溢流阀,因此对溢流阀本身的影响特性的因素考虑的多一点,其他不必要的可忽略不计。为了便于分析,需要画出直动式溢流阀的的结构简图,该结构简图及其与系统其他部分的关系如图2。 图2 所研究系统的结构简图
在建立数学模型时,所考虑的的影响因素主要有:溢流阀本身的弹簧柔度C 弹、阀芯质量I 阀 、阀口液阻R 阀 、阻尼孔液阻R 孔 ,及阀芯底部控制油压力p 控 。 此外,系统其他部分考虑的因素有:泵的泄露液阻R 泄 、管道(主要是软管)液 容C 管及模拟负载的节流阀液阻R 节 。 2 功率键合图 按照键合图理论,描述一个系统主要使用容性元件C、阻性元件R、惯性元件I、流源S f、力源Se、转换器TF。将这些基本元件按照功率流程连接起来,构成系统的键合图,如图3。 图3 功率键合图 图中带箭头的直线表示功率键,箭头表示功率流向。每一根功率键上有表示构成功率的两个变量,一般用力变量e和流变量f表示,但在传递不同类型能量的系统中,力变量和流变量各有其不同的物理变量。每根键上的变量都有脚标,以示区别。 图中功率流程是从左向右的。第一个结点是0结点,表示定量泵供给的具有确定流量q1的流源Sf,在同一压力下有5个分支功率从容腔流出,其中有4个是受作用元控制的,即控制泵泄漏量q3的泄露液阻R 泄 、控制管道中油液压缩 所补充的流量q2的液容C 管、控制供给负载流量q4的节流阀液阻R 节 以及控制 溢流量q5的溢流阀阀口液阻R 阀 ,另一个分支功率是用于控制阀芯运动的P6.q6。 第二个结点是1结点,表示功率流p6.q6在同一流量下又分成两个功率流,其一 是受阻尼孔液阻R 孔 控制,具有压力损失p7,相应的功率损失为p7.q7,另一支液压功率流p8.q8,经变换器TF转换成机械功率F9.v9,作用在阀芯底部来控制阀芯运动。最后一个结点为1结点,功率流F9.v9在同一运动速度下,其力变量F 经3个分支功率流,分别用于克服弹簧的预压紧力F10、弹簧继续受压产生的弹性力F11、以及用于克服惯性力F12以产生阀芯的加速度a12 。
注塑机液压系统设计
机电课程设计 题目:注塑机液压系统设计 学院:机械工程学院 专业:机械设计制造及其自动化班级:学号:学生姓名: 导师姓名: 完成日期:
课程设计任务书 设计题目:注塑机液压系统设计 姓名系别机械工程专业机械设计及其自动化班级学号 指导老师教研室主任 一、设计要求及任务 1.设计要求 (1)公称注射量:250 cm3;螺杆直径: d=40mm;螺杆行程:s1=200mm;最大注射压力p=153MPa;注射速度:vw=0.07m/s;螺杆转速:n=60r/min;螺杆驱动功率:Pm=5kW;注射座最大推力:Fz=27 (kN);注射座行程:s2=230(mm);注射座前进速度:vz1=0.06m/s;注射座后退速度:vz2=0.08m/s;最大合模力(锁模力)Fh=900 (kN);开模力:Fk=49 (kN);动模板(合模缸)最大行程:s3=350 (mm);快速合模速度:vhG = 0.1m/s;慢速合模速度:vhG =0.02m/s;快速开模速度:vhG =0.13m/s;慢速开模速度:vhG =0.03m/s; (2)注塑机工作参数设计计算; (3)液压系统原理方案设计;液压系统设计计算及元件选择; (4)注塑机及液压系统总图设计。 2.设计任务 (1)绘制注塑机合模缸、注塑装置和液压系统油箱的装配图; (2)绘制液压系统原理图; (3)系统零部件的计算与选型; (4)按照要求编写设计说明书和打印图纸。 二、进度安排及完成时间 1.设计时间:两周,2012年6月 25日至2012年7月6日。 2.进度安排 第19周:布置设计任务,查阅资料,熟悉设计要求及任务,进行系统设计。 第20周:整理资料,撰写设计说明书,答辩,交设计作业。(印稿及电子文档)。
挖掘机力士乐液压系统分析
挖掘机力士乐液压系统分析 [主要内容] 介绍了力士乐闭中心负载敏感压力补偿挖掘机液压系统组成及其工作原理、特性。重点分析了多路阀 液压系统、液压泵控制系统、各主要液压作用元件液压回路及多路阀先导操纵系统等。 目前液压挖掘机有两种油路:开中心直通回油六通阀系统和闭中心负载敏感压力补偿系统,我国国产液压挖掘机大多采用“开中心”系统,而国外著名的挖掘机厂家基本上都采用“闭中心”系统。闭中心具有明显的优点,但价格较贵。国内厂家对开中心系统比较熟悉,而对闭中心系统不太了解,因此有必要来介绍一下闭中心系统,本文重点分析力士乐闭中心负载敏感压力补偿(LUDV)挖掘机油路。 LUDV意为与负载无关的分配阀。 LUDV系统 力士乐挖掘机液压系统可以看作由以下4部分组成: ①多路阀液压系统(主油路); ②液压泵控制液压系统(包括与发动机综合控制); ③各液压作用元件液压子系统,包括动臂、斗杆、铲斗、回转和行走液压系统,还包括附属装置液压系统; ④多路阀操纵和控制液压系统。
1多路阀液压系统 多路阀液压系统是液压挖掘机的主油路,它确定了液压泵如何向各液压作用元件的供油方式,决定了液压挖掘机的工作特性。力士乐采用的闭中位负载敏感压力补偿多路阀液压系统的工作原理见图1(因换向阀不影响原理分析,故未画出)。 图1挖掘机力士乐主油路简图 挖掘机力士乐主油路由工装油路和回转油路二个负载敏感压力补偿系统组成。 1.1工装油路 工作装置和行走油路(除回转外)简称工装油路,用阀后补偿分流比负载敏感压力补偿(LUDV)系统,具有抗饱和功能。在每个操纵阀阀杆节流口后,设压力补偿阀,然后通过方向阀向各液压作用元件供油。LUDV多路阀原理符号见图2。
基于键合图及Simulink的换管机回转液压系统动态仿真分析_王丹
收稿日期:2009-11-06;修订日期:2010-01-03 基金项目:陕西省自然科学基金项目(2007E 218);陕西省教育 厅自然科学专项(09J K559). 作者简介:王丹(1984-),女,西安建筑科技大学硕士研究生。 基于键合图及S imu link 的换管机回转液压系统动态仿真分析 王 丹1 ,原思聪1 ,王晓瑜1 ,李志远 2 (1 西安建筑科技大学机电工程学院,陕西 西安 710055; 2 重庆宜康实业有限公司,重庆 401147) 摘 要:采用功率键合图法,建立了地下管线液压换管机回转液压系统的数学模型;依据数学模型,运用动态仿真工具S i m u link 建立液压系统的仿真模型。仿真结果反映了液压马达入口压力和输入流量随时间的变化情况,为分析系统的动态特性提供了依据。 关键词:功率键合图;液压系统;数学模型; S i m u li nk 中图分类号:TH 137,T P391 9 文献标识码:A 文章编号: 1001-196X (2010)01-0015-03 Dyna m ic si m ulation analysis of the sle w ing hydraulic syste m of pipeline replace m entm achines based on bond graph and Si m ulink WANG D an 1 ,YUAN S -i cong 1 ,WANG X iao -yu 1 ,L I Zh-i yuan 2 (1 Schoo l o fM echanical and E lectr i ca l Eng i neer i ng ,X i an U ni v ers it y o f A rch itecture and T echnology ,X i an 710055,Ch i na ;2 Chongq i ng Y ikang Indutr ial Co .,L td .,Chongqi ng 401147,Ch i na) Ab stract :The m at hema ti ca l model of t he sle w i ng hydrau lic syste m of pipe line replacem ent machines tha t i s used to rep l ace underg round p i peli nes has been establi shed w ith the pow er bond graph me t hod , and the si m u l a -ti on model of the hydrau lic syste m by usi ng the dyna m i c si m ulati on tool S i m u li nk has been bu ilt based on m athe -m ati ca lm ode ls .Si m ulati on results refl ec ted the change o f t he i nlet pressure and input flow o f t he hydrauli c mo -t o r w it h ti m e , and prov ided a favorab l e basis f o r the analysis o f the dynam ic character istics o f the syste m. K ey words :po w er bond g raph ;hydraulic syste m;m a t he m atical mode;l s i m u li nk 1 引言 研究液压系统的动态特性需要考虑其非线性因素。因此采用古典控制理论中的传递函数法对液压系统进行动态特性分析具有一定局限性。功率键合图法是一种处理多种能量范畴的工程系统动态分析法 [1] ,能够考虑系统中的非线性因素。 用图形方式描述系统中各元件间的相互关系,反映元件间的负载效应及系统中功率流动情况,表 示出与系统动态特性有关的信息[2] 。Si m u li n k (Dyna m ic Syste m S i m u lation )是一个支持线性和非线性系统的动态系统建模、仿真和综合分析的软件包,它提供了一个建立模型方块图的图形用户接口,可以立即看到系统的仿真结果 [3] 。 2 液压系统工作原理 本文以更换地下管线的换管机的回转液压系统为例,对其进行动态仿真分析。图1为换管机液压系统原理图。2 1 装杆 初始状态下,各换向阀均处于中位,各液压缸均为收回状态。当系统建立压力时,将第一根拉杆放入夹紧装置中,调整换向阀19使前夹紧 15 2010No 1 重型机械
注塑机原理之液压系统
(三)液压系统 注塑机是机、电、液一体化、集成化和自动化程度都很高。无论是机械液压式还全液压式,液压部分都占有相当的比值,对注塑机的技术性能、节能、环保以及成本占有重要部分。 注塑机液压系统由主回路、执行回路及辅助回路系统组成,如图所示。 图14 油路系统组成图 1,2,3,4,5,6—分别为合模油缸、滑模油缸、顶出油缸、注射座油缸、 注射油缸、液压xx; 7,8,9,10,11,12—分别为油缸的控制模块(CU)、指令模块(CM); 13—系统压力(P)、流量(Q)的控制和指令模块;14—泵;15—电机(M); 16—进油过滤器;17—油冷却器; 18—油箱;P—进油管路(高压);T— 回油管路。(低压) 油路总管线(P、T、P)的上部分是执行回路系统,下部分是主回路系统及辅助回路系统。
执行回路系统:主要由各执行机构(油缸)和指令及控制装置(电磁阀)组成。其功能是将进入管路P的高压油按程序放到油缸的左腔或右腔中去,推动活塞杆执行动作。高压油进入的时间、顺序和位置是通过电磁换向阀来实现的,工作指令通过电信号发给电磁阀的电磁铁,控制其阀芯动作,将控制油路(P)的高压油,进入换向阀推动阀芯动作,将高压油接通到油缸中去;而各油缸中的回油经回油管路T及辅助油路系统放回油箱。 主回路系统:由动力源和控制模块组成。动力源系统(电机、油泵)产生油压(P)和流量(Q),与指令(CU)及控制(CM)模块(压力阀、流量阀等)组成回路。从泵来的高压油,进入主管路的时间、顺序、压力及流量,是通过流量阀,压力阀是电磁铁获得,指令的时间、顺序和强弱,由控制其阀芯的推力和开度来确定的。 执行回路与主回路之间是通过进油管路P(高压),回油管路T(低压)以及控制回路P(高压)形成“连接网络”。 1.主要液压组件 注塑机应用液压组件非常广泛。 ⑴.动力组件 由电机带动泵实现电能—机械能—液压能的转换。有各种油泵和液压xx。 油泵是靠封闭容腔使其容积发生变化来工作的。理想的泵是没有的,因为结构上总会有制品缝隙就会有泄漏,而且机械磨损也会产生间隙,所以就要考虑泵的效率。不同质量的泵,其效率是不同的,直接影响了液压系统工作的稳定性。此外,油的压缩性也会对泵的效率产生影响。 (2).执行组件 执行组件是将液压能转换为机械能的组件,主要有油缸和油xx。 ①油缸 油缸可分为单作用柱塞式、双作用活塞式、双作用活塞杆式和双作用伸缩式油缸。
挖掘机液压系统 精华版 --液压系统 入门必读材料
挖掘机工作原理 挖掘机的工作原理液压挖掘机主要由发动机、液压系统、工作装置、行走装置和电气控制等部分组成。液压系统由液压泵、控制阀、液压缸、液压马达、管路、油箱等组成。电气控制系统包括监控盘、发动机控制系统、泵控制系统、各类传感器、电磁阀等。液压挖掘机一般由工作装置、回转装置和行走装置三大部分组成。根据其构造和用途可以区分为:履带式、轮胎式、步履式、全液压、半液压、全回转、非全回转、通用型、专用型、铰接式、伸缩臂式等多种类型。工作装置是直接完成挖掘任务的装置。它由动臂、斗杆、铲斗等三部分铰接而成。动臂起落、斗杆伸缩和铲斗转动都用往复式双作用液压缸控制。为了适应各种不同施工作业的需要,液压挖掘机可以配装多种工作装置,如挖掘、起重、装载、平整、夹钳、推土、冲击锤等多种作业机具。回转与行走装置是液压挖掘机的机体,转台上部设有动力装置和传动系统。发动机是液压挖掘机的动力源,大多采用柴油要在方便的场地,也可改用电动机。液压传动系统通过液压泵将发动机的动力传递给液压马达、液压缸等执行元件,推动工作装置动作,从而完成各种作业。挖掘机液压系统是怎么工作的? 挖掘机液压系统是怎么工作的挖掘机有三个部分的液压缸分别是动臂,斗杆,铲斗。有三个液压马达,左右行走和一个回转。这些都由换向阀控制供油。油液从液压泵出来经换向阀分配到以上各执行元件。挖掘机的换向阀大多是液控的就是用一股压力较小的油推动换向阀的阀芯。一般中型挖掘机用的是三联泵,两个大泵提供工作所需要的压力,一个小齿轮泵给控制油路供油。控制油通过手柄下边的控制阀调节主油路换向阀阀芯的位置从而实现动臂斗杆和铲斗油缸的伸缩。以及液压马达的转与停以及转动方向。主油路设溢流阀,压力超过限定值就会打开,油液直接回油箱。所以系统压力始终保持在一定范围内。同样道理在各油缸的支路也设溢流阀,实现二次调定压力。不光是挖掘机,任何液压系统工作原理都是油箱中油液-泵-控制元件-执行元件-油箱。液控比例阀换向阀的作用和液控比例阀换向阀串联的先导阀是什么作用传统换向阀的进出油口控制通过一根阀芯来进行,两油口听开口对应关系早在阀芯设计加工时已确定,在使用过程中不可能修改,从而使得通过两油口的流量或压力不能进行独立控制,互不影响。随着微处理控制器、传感器元件成本的下降,控制技术的不断完善,使得双阀芯控制技术在工程机械领域得以应用。英国Utronics 公司利用自己的技术及专利优势研制出双阀芯多路换向阀,已广泛应用于JCB、Deere、DAWOO、CASE 等公司的挖掘机、*车、装载机及挖掘装载机等产品上。为适应中国工程机械产品对液压系统功能要求。稳定性以及自动化控制程度的不断提高,Utronics 公司产品适时进入中国市场,现已初步完成厦工(5t)装载机、詹阳(8t)挖掘机样机调试并进入试验阶段。1、传统单阀芯换向阀的缺陷传统的单阀芯换向阀所组成的液压系统难以合理解决好以下功能和控制之间存在的矛盾:(1)液压系统设计时为提高系统稳定性,减少负载变化对速度的影响,要么牺牲部分我们想实现的功能,要么增加额外的液压元件,如调速阀、压力控制阀等,通过增加阻尼,提高系统速度刚度来提高系统的稳定性。但是这样元件的增加又会降低效率,浪费能源;还会使得整个系统的可*性降低、增加成本。(2)由于换向结构的特殊性,使得用户在实现某一功能时必须购买相应的液压元件,再加上工程机械厂家会根据不同最终用户要求设计出相应的功能,这样会造成生产厂家采购同类、多规格的液压控制元件来满足不同功能要求的需要,不利于产品通用化及产品管理,同时会大大提高产品成本。 (3)由于执行机构进出液压油通过一根阀芯进行控制,单独控
液压系统符号
液压系统符号
1)液压系统图形符号的构成要素 构成液压图形符号的要素有点、线、圆、半圆、三角形、正方形、长方形、囊形. ※点表示管路的连接点,表示两条管路或阀板内部流道是彼此相通的 ※实线表示主油路管路; ※虚线表示控制油管路; ※点划线所框的内部表示若干个阀装于一个集成块体上,或者表示组合阀,或者表示一些阀都装在泵上控制该台泵。 大圆加一个实心小三角形表示液压泵或液压马达(二者三角形方向相反),中圆表示测量仪表,小圆用来构成单向阀与旋转接头、机械铰链或滚轮的要素,半圆为限定旋转角度的液压马达或摆动液压缸的构成要素。 ※正方形是构成控制阀和辅助元件的要素,例如阀体、滤油器的体壳等。 ※长方形表示液压缸与阀等的体壳、缸的活塞以及某种控制方式等的组成要素。 ※半矩形表示油箱,囊形表示蓄能器及压力油箱等。 (2)液压图形的功能要素符号 表示功能要素的图形符号有三角形、直与斜的箭头、弧线箭头等。 实心三角形表示传压方向,并且表示所使用的工作介质为液体。泵、马达、液动阀及电液阀都有这种功能要素的实心三角形。 箭头表示液流流过的通路和方向,液压泵、液压马达、弹簧、比例电磁铁等上面加的箭头表示它们是可进行调节的。 弧线单、双向箭头表示电机液压泵液压马达的旋转方向,双向箭头表示它们可以正反转。其他如“W”表示弹簧,“”表示电气,“.L”表示封闭油口,“*”表示节流阻尼小孔等。 (3)其他符号 管路连接及管接头符号、机械控制件和控制方式符号、泵和马达图形符号、液压缸图形符号、各种控制阀(如压力阀、流量阀、方向阀等)图形符号、各种辅助元件的图形符号、检测器或指示器图形符号等。 常用液压图形符号 (1)液压泵、液压马达和液压缸 名称符号说明名称符号说明 液压泵液压 泵 一般 符号 双 作 用 缸 不可 调单 向缓 冲缸 详细符号
挖掘机液压系统图
挖掘机液压系统图 一.液压挖掘机液压系统的基本类型 液压挖掘机液压系统大致上有定量系统、变量系统和定量、变量复合系统等三种类型。 1.定量系统 在液压挖掘机采用的定量系统中,其流量不变,即流量不随外载荷而变化,通常依靠节流来调节速度。根据定量系统中油泵和回路的数量及组合形式,分为单泵单回路定量系统、双泵单回路定量系统、双泵双回路定量系统及多泵多回路定量系统等。 2.变量系统 在液压挖掘机采用的变量系统中,是通过容积变量来实现无级调速的,其调速方式有三种:变量泵-定量马达调速、定量泵-变量马达调速和变量泵-变量马达调速。 单斗液压挖掘机的变量系统多采用变量泵-定量马达的组合方式实现无极变量,且都是双泵双回路。根据两个回路的变量有无关连,分为功率变量系统和全功率变量系统两种。其中的分功率变量系统的每个油泵各有一个功率调节机构,油泵的流量变化只受自身所在回路压力变化的影响,与另一回路的压力变化无关,即两个回路的油泵各自独立地进行恒功率调节变量,两个油泵各自拥有一半发动机输出功率;全功率变量系统中的两个油泵由一个总功率调节机构进行平衡调节,使两个油泵的摆角始终相同。同步变量、流量相等。决定流量变化的是系统的总压力,两个油泵的功率在变量范围内是不相同的。其调节机构有机械联动式和液压联动式两种形式。 二.YW-100型单斗液压挖掘机液压系统 国产YW-100型履带式单斗液压挖掘机的工作装置、行走机构、回转装置等均采用液压驱动,其液压系统如图1所示。 该挖掘机液压系统采用双泵双向回路定量系统,由两个独立的回路组成。所用的油泵1为双联泵,分为A、B两泵。八联多路换向阀分为两组,每组中的四联换向阀组为串联油路。油泵A输的压力进入第一组多路换向阀,驱动回转马达、铲斗油缸、辅助油缸,并经中央回转接头驱动右行走马达7。该组执行元件不工作时油泵A输出的压力油经第一组多路换向阀中的合流阀进入第二组多路换向阀,以加快动臂或斗杆的工作速度。油泵B输出的压力油进入第二组多路换向阀,驱动动臂油缸、斗杆油缸,并经中央回转接头驱动左行走马达8和推土板油缸6。 该液压系统中两组多种换向阀均采用串联油路,其回油路并联,油液通过第二组多路换向阀中的限速阀5流向油箱。限速阀的液控口作用着由梭阀提供的A、B两油泵的最大压力,当挖掘机下坡行走出现超速情况时,油泵出口压力降低,限速阀自动对回油进行节流,防止溜坡现象,保证挖掘机行驶安全。
运用功率键合图的液压系统能量回收研究
制造技术/工艺装备现代制造工程(Modern Manufacturing Engineering)2012年第1期 运用功率键合图的液压系统能量回收研究* 田勇,高宏伟,刘波,李玮琪 (河南工业大学机电工程学院,郑州450007) 摘要:介绍了能量回收型液压电梯的工作原理,并以能量回收回路为研究模型,建立回路的功率键合图模型和状态方程,通过仿真证明能量回收回路的可行性。 关键词:能量回收回路;功率键合图;仿真 中图分类号:TH16文献标志码:A文章编号:1671—3133(2012)01—0100—05 Based on power bond graph’s hydraulic system of energy recovery research Tian Yong,Gao Hongwei,Liu Bo,Li Weiqi (School of Mechanical Engineering,Henan University of Technology,Zhengzhou450007,China)Abstract:Describes the energy recovery hydraulic elevator’s principle,work and study on energy recovery circuit for model,es-tablished this circuit of the power bond graph model and the equations of state,the feasibility of energy recovery circuit is proved by simulation. Key words:the energy recovery circuit;power bond graphs;simulation 0引言 在能源日益紧缺的今天,高效节能和环保的产品日益受到人们的青睐,而液压电梯作为生活中必不可少的垂直交通运输工具,降低其装机功率和能耗势在必行。目前液压电梯的节能方法主要有:增加机械配重、增加蓄能器和变频调速控制等[1-2]。 本文是以液压系统能量回收的方法来探讨液压电梯的节能减排。电梯液压系统除了要求能完成基本的动作外,还要求结构简单、效率高、工作可靠和节省能源等,据此设计的液压系统如图1所示。 功率键合图法是描述系统功率的传输、转化、储存和消耗的图形表示[3]。该方法于20世纪50年代末由Paynter提出,之后由Kainopp和Rosenberg等完善,使其成为控制技术的一个重要组成部分[4]。与其他建模方法相比,键合图法具有其独特之处,即可以处理复杂的系统,模型结构简明,包含信息量大;它对功率流描述上的模块化结构与系统本身各部分物理结构及各种动态影响因素之间具有明确而形象的一一对应关系,便于理解其物理意义;其动力学方程的建立方法具有规则化的特点,便于推导出相应的数学模型。因此该方法已广泛应用于许多工程领域,如机械、液压、电气、热力及医学等[5-6]。鉴于键合图法的特点,本文将利用其建立系统的数学模型,以便于后继的仿真和分析。 1系统设计与分析 图1所示为能量回收型电梯液压系统,其工作原理为:电磁铁5YA通电,泵3的压力油经单向阀4、三位三通电磁换向阀17左位、截止阀13到达蓄能器12进行储能,当系统第一次运行时需首先向蓄能器供油。电梯上行时,电磁铁1YA、3YA同时得电,泵3的压力油经单向阀4、二位二通电磁换向阀6左位,同时,蓄能器12的压力油经截止阀13、蓄能回路液控单向阀15、二位三通电磁换向阀16上位、单向阀26,此时泵3的压力油和蓄能器12的压力油汇合,经过主回路液控单向阀7,进入液压柱塞缸10,顶着轿厢上升。当轿厢到达平层需停止时,1YA、3YA失电,6YA得电,主泵3卸荷,电梯停止,主回路液控单向阀7保压,其中溢流阀5作为安全阀调定系统压力,调速阀8调节轿厢上升速度。电梯下行时,电磁铁2YA、4YA、6YA、7YA同时得电,离合器20吸合,泵3的压力油经 *河南工业大学引进人才专项项目(150256);河南工业大学2010年研究生科技创新基金项目(10YJS053)
懂液压图形符号、懂液压系统图
看懂液压图形符号二看懂液压系统图 (1)液压系统图形符号的构成要素 构成液压图形符号的要素有点、线、圆、半圆、三角形、正方形、长方形、囊形?点表示管路的连接点,表示两条管路或阀板内部流道是彼此相通的?实线表示主油路管路; ? 虚线表示控制油管路;?点划线所框的内部表示若干个阀装于一个集成块体上,或者表示组合阀,或者表示一些阀都装在泵上控制该台泵。 ?大圆加一个实心小三角形表示液压泵或液压马达 (二者三角形方向相反) ,中?圆表示测量仪表,小圆用来构成单向阀与旋转接头、机械铰链或滚轮的要素,?半圆为限定旋转角度的液压马达或摆动液压缸的构成要素。 ?正方形是构成控制阀和辅助元件的要素,例如阀体、滤油器的体壳等。 ? 长方形表示液压缸与阀等的体壳、缸的活塞以及某种控制方式等的组成要素。? 半矩形表示油箱,囊形表示蓄能器及压力油箱等。 (2)液压图形的功能要素符号表示功能要素的图形符号有三角形、直与斜的箭头、弧线箭 头等。 实心三角形表示传压方向,并且表示所使用的工作介质为液体。泵、马达、液动阀及电液阀都有这种功能要素的实心三角形。 箭头表示液流流过的通路和方向,液压泵、液压马达、弹簧、比例电磁铁等上面加的箭头表示它们是可进行调节的。 弧线单、双向箭头表示电机液压泵液压马达的旋转方向,双向箭头表示它们可以正反转。其他如“W表示弹簧,表示电气,?“ L”表示封闭油口,“表示节流阻尼小孔等。 (3) 其他符号管路连接及管接头符号、机械控制件和控制方式符号、泵和马达图形符号、液压缸图形符号、各种控制阀(如压力阀、流量阀、方向阀等)图形符号、各种
辅助元件的图形符号、检测器或指示器图形符号将在本手册后续的相应内容中分 别予以介绍,此处仅举出它们 的一些例子,如图1—4所示。 十 J 9 -W* ?乜 □ □ e =?>- ①會书9 ? 丄 L L I 乌 A _L -
装载机液压系统
关于装载机液压系统的说明 1.装载机产品的工作液压系统主要控制工作装置的动臂完成举升、下降、中位、浮动功能以及铲斗的收斗、中位、卸载等动作。主要有手动操纵(LW521F、LW321F、LW421F、LW500F)和液压先导操纵(ZL50G、ZL60G、ZL80G、LW400K)两种结构形式。 (手动软轴操纵) (液压先导操纵)
ZL50G等产品采用的液压先导操纵结构原理:推动先导阀的操纵杆,从先导泵来的先导油通过先导阀,推动多路换向阀阀芯的移动,从而实现工作装置的运动。手动操纵是靠手动操纵软轴来实现多路换向阀阀芯移动。手动操纵结构主要特点是价格便宜,结构简单、可靠,但操纵力大、操纵比例性能不好;液压先导操纵结构主要优特点是操纵力小,控制比例性能好,大大降低了司机的劳动强度,但系统较复杂、制造成本偏高。 现在国内装载机厂家采用的先导操纵原理都是一样的,元件也几乎都采用浙江临海海宏公司的产品,在高档出口车上部分采用了进口的先导阀和多路换向阀。 2.转向液压系统主要控制装载机的行驶方向。5吨产品主要有全液压大排量转向系统(541F)、负荷传感型同轴流量放大转向系统(521F)以及流量放大转向系统(50G、60G、80G)。全液压大排量转向系统的特点是结构简单、可靠、转向平稳,但操纵力大、系统发热量大,现采用较少;负荷传感型同轴流量放大转向系统的特点是操纵轻便、灵活、操纵力小、可靠、节能,但转向平稳性不好;流量放大转向系统的特点是以低压小流量来控制高压大流量,操纵力小,转向灵活、可靠。 1).ZL50G等产品采用的先导型流量放大转向原理:转向时,从先导泵来的低压小流量的先导油通过转向器,推动流量放大阀主阀芯移动,来控制转向泵过来的较大流量的压力油进入转向油缸,完成转向动作。由于通过转向器的油液是低压小流量的,转向器的排量较小,
注塑机液压系统
注塑机液压系统 注塑机液压系统 一、概述 塑料注射成形机是一种将颗粒状塑料经加热熔化呈流动状态后,以高压、快速注入模腔,并保压和冷却而凝固成型为塑料制品的加工设备,简称为注塑机。 1.注塑机的组成及工作程序 图F为注塑机的组成示意,它主要由合模部件、注射部件和床身组成。合模部件又由启合模机构、定模板、动模板和制品顶出装置等组成。注射部件位于注塑机的右上方,由加料装置(料筒、螺杆、喷嘴)、预塑装置、注射液压缸和注射座移动缸等组成。注塑工作程序如图G所示。 2.注塑机工况对液压系统的要求
(1)具有足够的合模力在注射过程中,常以40~150MPa的高压注入模腔,为防止塑料制品产生溢边或脱模困难等现象发生,要求具有足够的合模力。为了减小合模缸的尺寸或降低压力,常采用连杆扩力机构来实现合模与锁模。 (2)开模、合模速度可调由于既要考虑缩短空程时间以提高生产率,又要考虑合模过程中的缓冲要求以保证制品质量,并避免产生冲击,所以在启、合模过程中,要求移模缸具有慢、快、慢的速度变化。 (3)注射座可整体前进与后退注射座整体移动由液压缸驱动,除保证在注射时具有足够的推力,使喷嘴与模具浇口紧密接触外,还应按固定加料、前加料和后加料三种不同的预塑形式调节移动速度。为缩短空程时间,注射座移动也应具有慢、快的速度变化。 (4)注射的压力和速度可调节根据原料、制品的几何形状和模具浇口的布局不同,在注射成型过程中要求注射的压力和速度可调节。 (5)可保压冷却熔体注入型腔后,要保压和冷却。当冷却凝固时因有收缩,在型腔内要补充熔体,否则,因充料不足而出现残品。因此,要求液压系统保压,并根据制品要求,可调节保压的压力。 (6)顶出制品时速度平稳制品在冷却成型后被顶出。当脱模顶出时,为了防止制品受损,运动要平稳,并能按不同制品形状,对顶出缸的速度进行调节。二、XS-ZY-250A型注塑机液压系统的工作原理 图H所示为XS-ZY-250A型注塑机的液压系统原理图。该液压系统由三台液压系供油,液压泵B1为高压小流量泵;液压泵B2和B3为双联泵,是低压大流量泵。利用电液比例溢流阀的断电,可以使泵处于卸荷状态,从而可以构成三级流量调节。
液压挖掘机液压系统介绍
液压挖掘机液压系统介绍 newmaker 按照挖掘机工作装置和各个机构的传动 要求,把各种液压元件用管路有机地连 接起来的组合体,称为挖掘机的液压系统。其功能是,以油液为工作介质,利用液压泵将发动机的机械能转变为液压能并进行传送,然后通过液压缸和液压马达等将液压能转返为机械能,实现挖掘机的各种动作。 基本要求 液压挖掘机的动作复杂,凡要机构经常启动、制动、换向、负载变化大,冲击和振动频繁,而且野外作业,温度和地理位置变化大,因此根据挖掘机的工作特点和环境特点,液压系统应满足如下要求: 1)要保证挖掘机动臂、斗杆和铲斗可以各自单独动作,也可以互相配合实现复合动作。2)工作装置的动作和转台的回转既能单独进行,又能作复合动作,以提高挖掘机的生产率。3)履带式挖掘机的左、右履带分别驱动,使挖掘机行走方便、转向灵活,并且可就地转向,以提高挖掘机的灵活性。 4)保证挖掘机的一切动作可逆,且无级变速。 5)保证挖掘机工作安全可靠,且各执行元件(液压缸、液压马达等)有良好的过载保护;回转机构和行走装置有可靠的制动和限速;防止动臂因自重而快带下降和整机超速溜坡。 为此,液压系统应做到: 1)有高的传动效率,以充分发挥发动机的动力性和燃料使用经济性。 2)液压系统和液压元件在负载变化大、急剧的振动冲击作用下,具有足够的可靠性。 3)调协轻便耐振的冷却器,减少系统总发热量,使主机持续工作时液压油温不超过80度,或温升不超过45度。 4)由于挖掘机作业现场尘土多,液压油容易被污染,因此液压系统的密封性能要好,液压元件对油液污染的敏感性低,整个液压系统要设置滤油器和防尘装置。 5)采用液压或电液伺服操纵装置,以便挖掘机设置自动控制系统,进而提高挖掘机技术性能和减轻驾驶员的劳动强度。
注塑机原理之液压系统
注塑机是机、电、液一体化、集成化和自动化程度都很高。无论是机械液压式还全液压式,液压部分都占有相当的比值,对注塑机的技术性能、节能、环保以及成本占有重要部分。 注塑机液压系统由主回路、执行回路及辅助回路系统组成,如图所示。 图14 油路系统组成图 1,2,3,4,5,6—分别为合模油缸、滑模油缸、顶出油缸、注射座油缸、注射油缸、液压马达; 7,8,9,10,11,12—分别为油缸的控制模块(CU)、指令模块(CM); 13—系统压力(P)、流量(Q)的控制和指令模块;14—泵;15—电机(M); 16—进油过滤器;17—油冷却器;18—油箱;P—进油管路(高压);T—回油管路。(低压) 油路总管线(P、T、P)的上部分是执行回路系统,下部分是主回路系统及辅助回路系统。 执行回路系统:主要由各执行机构(油缸)和指令及控制装置(电磁阀)组成。其功能是将进入管路P的高压油按程序放到油缸的左腔或右腔中去,推动活塞杆执行动作。高压油进入的时间、顺序和位置是通过电磁换向阀来实现的,工作指令通过电信号发给电磁阀的电磁铁,控制其阀芯动作,将控制油路(P)的高压油,进入换向阀推动阀芯动作,将高压油接通到油缸中去;而各油缸中的回油经回油管路T及辅助油路系统放回油箱。 主回路系统:由动力源和控制模块组成。动力源系统(电机、油泵)产生油压(P)和流量(Q),与指令(CU)及控制(CM)模块(压力阀、流量阀等)组成回路。从泵来的高压油,进入主管路的时间、顺序、压力及流量,是通过流量阀,压力阀是电磁铁获得,指令的时间、顺序和强弱,由控制其阀芯的推力和开度来确定的。 执行回路与主回路之间是通过进油管路P(高压),回油管路T(低压)以及控制回路P(高压)形成“连接网络”。