贪心算法学习总结

贪心算法
一、算法思想
贪心法的基本思路:
——从问题的某一个初始解出发逐步逼近给定的目标,以尽可能快的地求得更好的解。当达到某算法中的某一步不能再继续前进时,算法停止。
该算法存在问题:
1. 不能保证求得的最后解是最佳的;
2. 不能用来求最大或最小解问题;
3. 只能求满足某些约束条件的可行解的范围。
实现该算法的过程:
从问题的某一初始解出发;
while 能朝给定总目标前进一步do
求出可行解的一个解元素;
由所有解元素组合成问题的一个可行解;
二、例题分析
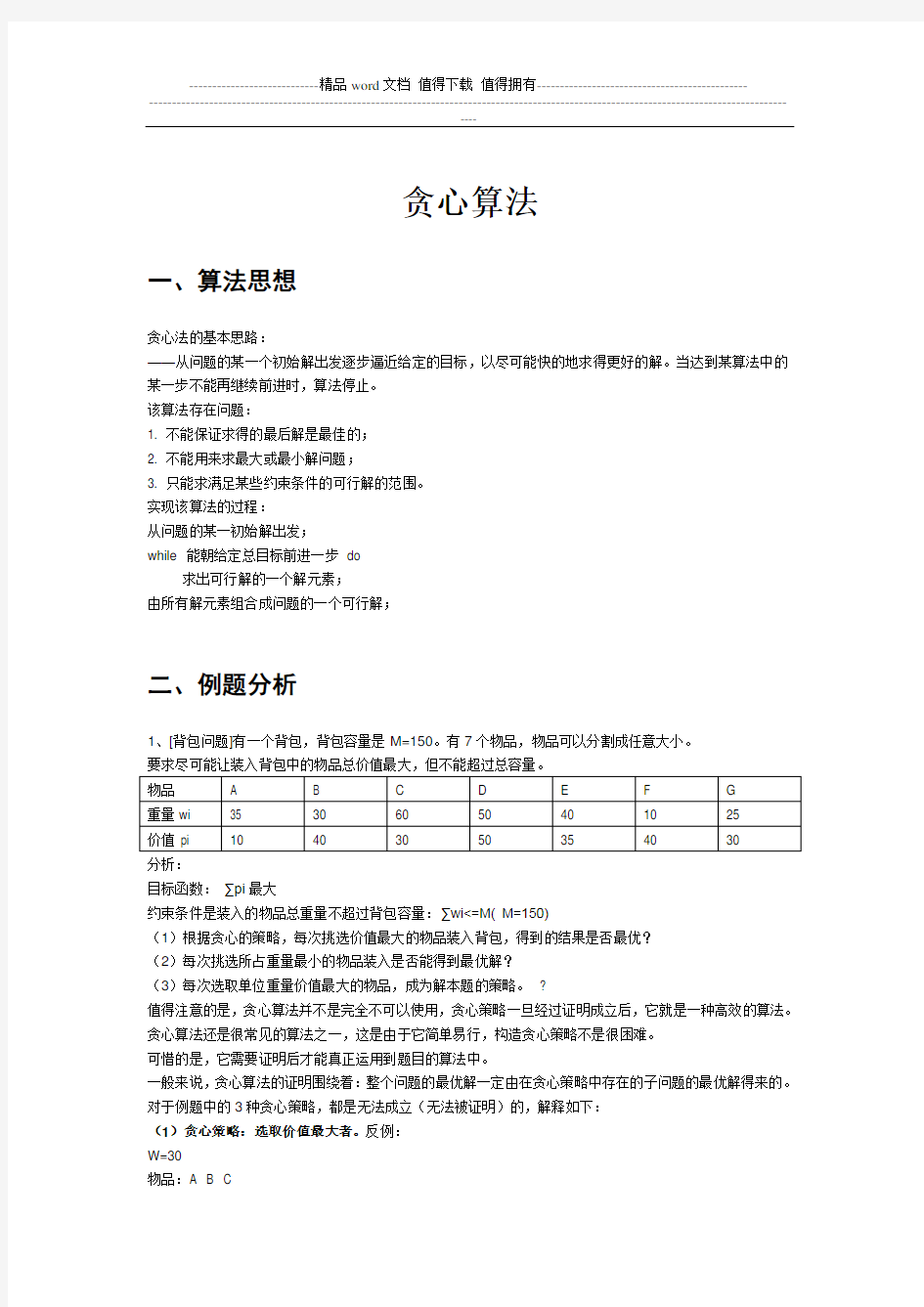
1、[背包问题]有一个背包,背包容量是M=150。有7个物品,物品可以分割成任意大小。
要求尽可能让装入背包中的物品总价值最大,但不能超过总容量。
分析:
目标函数:∑pi最大
约束条件是装入的物品总重量不超过背包容量:∑wi<=M( M=150)
(1)根据贪心的策略,每次挑选价值最大的物品装入背包,得到的结果是否最优?
(2)每次挑选所占重量最小的物品装入是否能得到最优解?
(3)每次选取单位重量价值最大的物品,成为解本题的策略。?
值得注意的是,贪心算法并不是完全不可以使用,贪心策略一旦经过证明成立后,它就是一种高效的算法。贪心算法还是很常见的算法之一,这是由于它简单易行,构造贪心策略不是很困难。
可惜的是,它需要证明后才能真正运用到题目的算法中。
一般来说,贪心算法的证明围绕着:整个问题的最优解一定由在贪心策略中存在的子问题的最优解得来的。对于例题中的3种贪心策略,都是无法成立(无法被证明)的,解释如下:
(1)贪心策略:选取价值最大者。反例:
W=30
物品:A B C
重量:28 12 12
价值:30 20 20
根据策略,首先选取物品A,接下来就无法再选取了,可是,选取B、C则更好。
(2)贪心策略:选取重量最小。它的反例与第一种策略的反例差不多。
(3)贪心策略:选取单位重量价值最大的物品。反例:
W=30
物品:A B C
重量:28 20 10
价值:28 20 10
根据策略,三种物品单位重量价值一样,程序无法依据现有策略作出判断,如果选择A,则答案错误。
所以需要说明的是,贪心算法可以与随机化算法一起使用,具体的例子就不再多举了。(因为这一类算法普及性不高,而且技术含量是非常高的,需要通过一些反例确定随机的对象是什么,随机程度如何,但也是不能保证完全正确,只能是极大的几率正确)
三、贪心算法的基本要素
1、贪心选择性质:所求问题的整体最优解可以通过一系列局部最优的选择,即贪心选择来达到。(与动态规划的主要区别)
采用自顶向下,以迭代的方式作出相继的贪心选择,每作一次谈心选择就将所求问题简化为一个规模更小的子问题。
对于一个具体问题,要确定它是否具有贪心选择的性质,我们必须证明每一步所作的贪心选择最终导致问题的最优解。通常可以首先证明问题的一个整体最优解,是从贪心选择开始的,而且作了贪心选择后,原问题简化为一个规模更小的类似子问题。然后,用数学归纳法证明,通过每一步作贪心选择,最终可得到问题的一个整体最优解。
2、最优子结构性质:包含子问题的最优解
1、设有n个活动的安排,其中每个活动都要求使用同一资源,如演讲会场,而在同一时间只允许一个活动使用这一资源。每个活动都有使用的起始时间和结束时间。问:如何安排可以使这间会场的使用率最高。
算法:一开始选择活动1,然后依次检查活动i是否与当前已选择的所有活动相容,若相容则活动加入到已选择的活动集合中,否则不选择活动i,而继续检查下一活动的相容性。即:活动i的开始时间不早于最近加入的活动j的结束时间。Prodedure plan;
Begin
n:=length[e];
a {1};
j:=1;
for i:=2 to n do
if s[i]>=f[j] then
begin a a∪{i};
j:=i;
end
end;
例1 [找零钱] 一个小孩买了价值少于1美元的糖,并将1美元的钱交给售货员。售货员希望用数目最少的硬币找给小孩。假设提供了数目不限的面值为2 5美分、1 0美分、5美分、及1美分的硬币。售货员分步骤组成要找的零钱数,每次加入一个硬币。选择硬币时所采用的贪婪准则如下:每一次选择应使零钱数尽量增大。为保证解法的可行性(即:所给的零钱等于要找的零钱数),所选择的硬币不应使零钱总数超过最终所需的数目。
假设需要找给小孩6 7美分,首先入选的是两枚2 5美分的硬币,第三枚入选的不能是2 5美分的硬币,否则硬币的选择将不可行(零钱总数超过6 7美分),第三枚应选择1 0美分的硬币,然后是5美分的,最后加入两个1美分的硬币。
贪婪算法有种直觉的倾向,在找零钱时,直觉告诉我们应使找出的硬币数目最少(至少是接近最少的数目)。可以证明采用上述贪婪算法找零钱时所用的硬币数目的确最少(见练习1)。
例2 [机器调度] 现有n 件任务和无限多台的机器,任务可以在机器上得到处理。每件任务的开始时间为si,完成时间为fi ,si < fi 。[si , fi ] 为处理任务i 的时间范围。两个任务i,j 重指两个任务的时间范围区间有重叠,而并非是指i,j 的起点或终点重合。例如:区间[ 1,4 ]与区间[ 2,4 ]重叠,而与区间[ 4,7 ]不重叠。一个可行的任务分配是指在分配中没有两件重叠的任务分配给同一台机器。因此,在可行的分配中每台机器在任何时刻最多只处理一个任务。最优分配是指使用的机器最少的可行分配方案。
假设有n= 7件任务,标号为a 到g。它们的开始与完成时间如图13-1a 所示。若将任务a分给机器M1,任务b 分给机器M2,. . .,任务g 分给机器M7,这种分配是可行的分配,共使用了七台机器。但它不是最优分配,因为有其他分配方案可使利用的机器数目更少,例如:可以将任务a、b、d分配给同一台机器,则机器的数目降为五台。
一种获得最优分配的贪婪方法是逐步分配任务。每步分配一件任务,且按任务开始时间的非递减次序进行分配。若已经至少有一件任务分配给某台机器,则称这台机器是旧的;若机器非旧,则它是新的。在选择机器时,采用以下贪婪准则:根据欲分配任务的开始时间,若此时有旧的机器可用,则将任务分给旧的机器。否则,将任务分配给一台新的机器。
根据例子中的数据,贪婪算法共分为n = 7步,任务分配的顺序为a、f、b、c、g、e、d。第一步没有旧机器,因此将a 分配给一台新机器(比如M1)。这台机器在0到2时刻处于忙状态。在第二步,考虑任务f。由于当f 启动时旧机器仍处于忙状态,因此将f 分配给一台新机器(设为M2 )。第三步考虑任务b, 由于旧机器M1在Sb = 3时刻已处于闲状态,因此将b分配给M1执行,M1下一次可用时刻变成fb = 7,M2的可用时刻变成ff = 5。第四步,考虑任务c。由于没有旧机器在Sc = 4时刻可用,因此将c 分配给一台新机器(M3),这台机器下一次可用时间为fc = 7。第五步考虑任务g,将其分配给机器M2,第六步将任务e 分配给机器M1, 最后在第七步,任务2分配给机器M3。(注意:任务d 也可分配给机器M2)。
上述贪婪算法能导致最优机器分配的证明留作练习(练习7)。可按如下方式实现一个复杂性为O (nl o gn)的贪婪算法:首先采用一个复杂性为O (nl o gn)的排序算法(如堆排序)按Si 的递增次序排列各个任务,然后使用一个关于旧机器可用时间的最小堆。
例3 [最短路径] 给出一个有向网络,路径的长度定义为路径所经过的各边的耗费之和。要求找一条从初始顶点s 到达目的顶点d 的最短路径。
贪婪算法分步构造这条路径,每一步在路径中加入一个顶点。假设当前路径已到达顶点q,
且顶点q 并不是目的顶点d。加入下一个顶点所采用的贪婪准则为:选择离q 最近且目前不在路径中的顶点。
这种贪婪算法并不一定能获得最短路径。例如,假设在图1 3 - 2中希望构造从顶点1到顶点5的最短路径,利用上述贪婪算法,从顶点1开始并寻找目前不在路径中的离顶点1最近的顶点。到达顶点3,长度仅为2个单位,从顶点3可以到达的最近顶点为4,从顶点4到达顶点2,最后到达目的顶点5。所建立的路径为1 , 3 , 4 , 2 , 5,其长度为1 0。这条路径并不是有向图中从1到5的最短路径。事实上,有几条更短的路径存在,例如路径1,4,5的长度为6。
根据上面三个例子,回想一下前几章所考察的一些应用,其中有几种算法也是贪婪算法。例如,霍夫曼树算法,利用n- 1步来建立最小加权外部路径的二叉树,每一步都将两棵二叉树合并为一棵,算法中所使用的贪婪准则为:从可用的二叉树中选出权重最小的两棵。L P T调度规则也是一种贪婪算法,它用n 步来调度n 个作业。首先将作业按时间长短排序,然后在每一步中为一个任务分配一台机器。选择机器所利用的贪婪准则为:使目前的调度时间最短。将新作业调度到最先完成的机器上(即最先空闲的机器)。
注意到在机器调度问题中,贪婪算法并不能保证最优,然而,那是一种直觉的倾向且一般情况下结果总是非常接近最优值。它利用的规则就是在实际环境中希望人工机器调度所采用的规则。算法并不保证得到最优结果,但通常所得结果与最优解相差无几,这种算法也称为启发式方法( h e u r i s t i c s )。因此L P T方法是一种启发式机器调度方法。定理9 - 2陈述了L P T调度的完成时间与最佳调度的完成时间之间的关系,因此L P T启发式方法具有限定性能( bounded performance )。具有限定性能的启发式方法称为近似算法( a p p r o x i m a t i o na l g o r i t h m)。
本章的其余部分将介绍几种贪婪算法的应用。在有些应用中,贪婪算法所产生的结果总是最优的解决方案。但对其他一些应用,生成的算法只是一种启发式
方法,可能是也可能不是近似算法。
练习
1. 证明找零钱问题(例1 3 - 4)的贪婪算法总能产生具有最少硬币数的零钱。
2. 考虑例1 3 - 4的找零钱问题,假设售货员只有有限的2 5美分, 1 0美分, 5美分和1美分的硬币,给出一种找零钱的贪婪算法。这种方法总能找出具有最少硬币数的零钱吗?证明结论。
3. 扩充例1 3 - 4的算法,假定售货员除硬币外还有50, 20, 10, 5, 和1美元的纸币,顾客买价格为x 美元和y 美分的商品时所付的款为u 美元和v 美分。算法总能找出具有最少纸币与硬币数目的零钱吗?证明结论。
4. 编写一个C + +程序实现例1 3 - 4的找零钱算法。假设售货员具有面值为1 0 0,2 0,1 0,5和1美元的纸币和各种硬币。程序可包括输入模块(即输入所买商品的价格及顾客所付的钱数),输出模块(输出零钱的数目及要找的各种货币的数目)和计算模块(计算怎样给出零钱)。
5. 假设某个国家所使用硬币的币值为1 4 , 2 , 5和1分,则例1 3 - 4的贪婪算法总能产生具有最少硬币数的零钱吗?证明结论。
6. 1) 证明例1 3 - 5的贪婪算法总能找到最优任务分配方案。
2) 实现这种算法,使其复杂性为O (nl o gn)(提示:根据完成时间建立最小堆)。
*7. 考察例1 3 - 5的机器调度问题。假定仅有一台机器可用,那么将选择最大数量的任务在这台机器上执行。例如,所选择的最大任务集合为{a,b,e}。解决这种任务选择问题的贪婪算法可按步骤选择任务,每步选择一个任务,其贪婪准则如下:从剩下的任务中选择具有最小的完成时间且不会与现有任务重叠的任务。
1) 证明上述贪婪算法能够获得最优选择。
2) 实现该算法,其复杂性应为O(nl o gn)。(提示:采用一个完成时间的最小堆)
货箱装船
这个问题来自例1 - 2。船可以分步装载,每步装一个货箱,且需要考虑装载哪一个货箱。根据这种思想可利用如下贪婪准则:从剩下的货箱中,选择重量最小的货箱。这种选择次序可以保证所选的货箱总重量最小,从而可以装载更多的货箱。根据这种贪婪策略,首先选择最轻的货箱,然后选次轻的货箱,如此下去直到所有货箱均装上船或船上不能再容纳其他任何一个货箱。
例1-7 假设n =8, [w1 , ... w8 ]=[100,200,50,90,150,50,20,80], c= 4 0 0。利用贪婪算法时,所考察货箱的顺序为7 , 3 , 6 , 8 , 4 , 1 , 5 , 2。货箱7 , 3 , 6 , 8 , 4 , 1的总重量为3 9 0个单位且已被装载,剩下的装载能力为1 0个单位,小于剩下的任何一个货箱。在这种贪婪解决算法中得到[x1 , ..., x8 ] = [ 1 , 0 , 1 , 1 , 0 , 1 , 1 , 1 ]且?xi = 6。
定理1-1 利用贪婪算法能产生最佳装载。
证明可以采用如下方式来证明贪婪算法的最优性:令x = [x1 , ..., xn ]为用贪婪算法获得的解,令y =[ y1 , ..., yn ]为任意一个可行解,只需证明n ?i= 1xi ≥n ?i= 1yi 。不失一般性,可以假设货箱都排好了序:即wi≤wi + 1(1≤i≤n)。然后分几步将y 转化为x,转换过程中每一步都产生一个可行的新y,且n ?i = 1yi
大于等于未转化前的值,最后便可证明n ?i = 1xi ≥n ?j = 1yi 。
根据贪婪算法的工作过程,可知在[0, n] 的范围内有一个k,使得xi =1, i≤k且xi =0, i>k。寻找[ 1 ,n]范围内最小的整数j,使得xj≠yj 。若没有这样的j 存在,则n ?i= 1xi =n ?i = 1yi 。如果有这样的j 存在,则j≤k,否则y 就不是一个可行解,因为xj≠yj ,xj = 1且yj = 0。令yj = 1,若结果得到的y 不是可行解,则在[ j+ 1 ,n]范围内必有一个l 使得yl = 1。令yl = 0,由于wj≤wl ,则得到的y 是可行的。而且,得到的新y 至少与原来的y 具有相同数目的1。
经过数次这种转化,可将y 转化为x。由于每次转化产生的新y 至少与前一个y 具有相同数目的1,因此x 至少与初始的y 具有相同的数目1。货箱装载算法的C + +代码实现见程序1 3 - 1。由于贪婪算法按货箱重量递增的顺序装载,程序1 3 - 1首先利用间接寻址排序函数I n d i r e c t S o r t对货箱重量进行排序(见3 . 5节间接寻址的定义),随后货箱便可按重量递增的顺序装载。由于间接寻址排序所需的时间为O (nl o gn)。
程序13-1 货箱装船
template
void ContainerLoading(int x[], T w[], T c, int n)
{// 货箱装船问题的贪婪算法
// x[i] = 1 当且仅当货箱i被装载,1<=i<=n
// c是船的容量, w 是货箱的重量
// 对重量按间接寻址方式排序
// t 是间接寻址表
int *t = new int [n+1];
I n d i r e c t S o r t ( w, t, n);
// 此时, w[t[i]] <= w[t[i+1]], 1<=i // 初始化x for (int i = 1; i <= n; i++) x[i] = 0; // 按重量次序选择物品 for (i = 1; i <= n && w[t[i]] <= c; i++) { x[t[i]] = 1; c -= w[t[i]];} // 剩余容量 delete [] t; } 背包问题 在0 / 1背包问题中,需对容量为c 的背包进行装载。从n 个物品中选取装入背包的物品,每件物品i 的重量为wi ,价值为pi 。对于可行的背包装载,背包中物品的总重量不能超过背包的容量,最佳装载是指所装入的物品价值最高,即n ?i=1pi xi 取得最大值。约束条件为n ?i =1wi xi≤c 和xi?[ 0 , 1 ] ( 1≤i≤n)。 在这个表达式中,需求出xt 的值。xi = 1表示物品i 装入背包中,xi =0 表示物品i 不装入背包。0 / 1背包问题是一个一般化的货箱装载问题,即每个货箱所获得的价值不同。货箱装载问题转化为背包问题的形式为:船作为背包,货箱作为可装入背包的物品。 例1-8 在杂货店比赛中你获得第一名,奖品是一年免费杂货,店中有n种不同的货物。规则规定从每种货物中最多只能拿一件,车子的容量为c,物品i 需占用wi 的空间,价值为pi 。你的目标是使车中装载的物品价值最大。当然,所装货物不能超过车的容量,且同一种物品不得拿走多件。这个问题可仿照0 / 1背包问题进行建模,其中车对应于背包,货物对应于物品。 0 / 1背包问题有好几种贪婪策略,每个贪婪策略都采用多步过程来完成背包的装入。在每一步过程中利用贪婪准则选择一个物品装入背包。一种贪婪准则为:从剩余的物品中,选出可以装入背包的价值最大的物品,利用这种规则,价值最大的物品首先被装入(假设有足够容量),然后是下一个价值最大的物品,如此继续下去。这种策略不能保证得到最优解。例如,考虑n=2, w=[100,10,10], p =[20,15,15], c = 1 0 5。当利用价值贪婪准则时,获得的解为x= [ 1 , 0 , 0 ],这种方案的总价值为2 0。而最优解为[ 0 , 1 , 1 ],其总价值为3 0。 另一种方案是重量贪婪准则是:从剩下的物品中选择可装入背包的重量最小的物品。虽然这种规则对于前面的例子能产生最优解,但在一般情况下则不一定能得到最优解。考虑 n= 2 ,w=[10,20], p=[5,100], c= 2 5。当利用重量贪婪策略时,获得的解为x =[1,0], 比最优解[ 0 , 1 ]要差。 还可以利用另一方案,价值密度pi /wi 贪婪算法,这种选择准则为:从剩余物品中选择可装入包的pi /wi 值最大的物品,这种策略也不能保证得到最优解。利用此策略试解n= 3 ,w=[20,15,15], p=[40,25,25], c=30 时的最优解。 水声定位算法学习总结 一、无线传感器定位技术分类目前定位技术广泛地应用到各个领域,而且出现了很多定位算法,常用的定位方法有:到达角(Angel of Arrival,AOA)定位、到达时间(Time of Arrival,TOA)定位、到达时间差(Time Difference of Arrival,TDOA)定位以及AOA/TO A、AOA/TDOA等混合定位的方法。选择哪种定位方法要根据定位精度、硬件条件等因素来确定,但是最终目的是要用优化的方法得到满意的定位精度。在没有时间同步信号时,往往采用TDOA定位方法,TDOA定位法可消除对移动台时间基准的依赖性,因而可以降低成本并仍然保证较高的定位精度,但是需要有较好的延时估计方法,才能保证较高的时延估计精度。(1)基于测距的定位技术基于测距的定位方法依靠测量相邻节点之间的距离或者方向信息。现在有很多成熟的算法被用于基于测距的定位。例如TOA算法通过信号传播时间获取距离,TDOA算法利用接收从多个节点发出信号的时间差估测位置,而AOA算法则通过为每个节点设置天线阵列来测量节点间的相对方向角度值。(2)无需测距的定位技术无需测距的定位方法不要求距离信息,只依靠有关待定位传感器与种子节点之间连通性的测量数据。这种定位方法对硬件要求低,但是测量的准确度容易被节点的密度和网络条件所影响,因此不能被对精度要求高的基于WSN的应用采用。 二、三边定位和多变定位(1)信号强度(RSS,Received Signal Strength)通过信号在传播中的衰减来估计节点之间的距离,无线信道的数学模型PLd=PLd0-10nlogdd0-Xσ。尽管这种方法易于实施,但却面临很多挑战。首先信道由于受到信道噪声、多径衰减(Multi-path Fading)和非视距阻挡(Non-of- Sight Blockage)的影响[1],具有时变特性,严重偏离上诉模型;其次衰减率会随外界环境的不同而发生相应改变。根据接收到的信号估计出的距离d将有很大误差。(2)信号传播时间/时间差往返时间(TOA/TDOA/RTOF)a) 到达时间(TOA,Time Of Arrival)使用发射机到接收机之间往返的时间来计算收发机之间的距离,要求发射机和接收机严格时间同步。b ) 往返传播时间(RTOF,Roundtrip-Time-Of-Flight)发射机和接收机可属于不同的时钟域,基于信号传播时间的测距精度由时间差的测量精度决定。时间差的精度由参考时钟决定。c) 到达时间差(TDOA,Time Difference Of Arrival)使用两种不同传播速度的信号,向同一个方向发送即可。图1 示意图(3)接收信号相位差(PDOA,phase difference of Arrival)通过测量相位差,求出信号往返的传播时间[2],计算出往返距离 d=cφ2π*fc=cfcφ2π=λφ2π,其中,fc是信号频率,λ是信号的波长,φ是发送信号和反射信号的相位差,由上式可知d的范围是[0,]。不同的距离如果相差λ倍,则测量获得的相位相 一 1、人们对一切人、事、物的感受,由峰值和终值两个因素决定。峰值是指这段体验中的最高峰,包括正向和负向;终值是指这段体验结束时给你的感觉。 2、正是因为,每次你的学习过程,都充满着负向的峰值和终值。所以一旦你想起学习,内心满是厌恶、排斥,甚至恐惧。 3、解决的方法是,主动创造正向的峰值和终值。每次的学习过程,穿插着安排你喜欢且擅长的科目/章节/环节。如此,你每次都会有学得得心应手、反馈满满的时刻,也就是出现了正向的「峰值」。 4、每当你学习难搞、恐惧的科目,在负面情绪达到顶峰之前,可以先转换到喜欢且擅长的环节,情绪安抚后,再回头继续做难的事情。以此避免负向峰值的出现。 5、在你反馈感很强、情绪高涨满足的时刻结束学习,留下一个正向的终值。千万别学到想吐才结束。 6、从对手机软件上瘾的角度,我们可以把同样的规律应用到学习中。设定好时间和地点和情境,当满足这一条件时,你就直接去执行相应的行为,而不需要经过各种挣扎。让你每次的学习/工作,都尽量是简便、相对易执行的流程,而不是手忙脚乱、繁琐复杂。 7、大脑期待未知的、不确定的奖励,这会让我们更有动力。投入足够多,并且让自己看到一定的正反馈。需要提醒大家注意的是,这只是在很大程度上,减少学习留给我们的负面印象,减轻对学习的排斥心理。真正有效的学习,本就是需要克服困难、忍受一定的痛苦的。这在本质上是个没法解决的事儿。不过,有意识地把握学习的节奏,掌控自己对于学习的体验,是非常有意义、有积极作用的一件事。「在很大程度上」得到改善,已经足够了。 二 绝大多数人,都不曾意识到,自己的相当一部分努力,都是低水平的,甚至是无效的,只是徒有「勤奋」的表象,根本称不上真正的努力。 1、第一种「伪勤奋」,花大量时间做事情中最容易的环节。 解决思路:稍微一站脚能够到的任务,让你感到需要思考、需要克服困难的任务,才称得上「真勤奋」。 2、第二种「伪勤奋」,从来不去检测自己获得了什么。 解决思路:对于真正的勤奋来说,再功利主义也不为过。你要看到反馈,你要立刻看到反馈。一切不以检测/输出为目的的努力,都是耍流氓。 3、第三种「伪勤奋」,只是埋头苦学,从来不总结规律。 解决思路:正确的方法,以及按照方法进行的练习,会让你变「聪明」的。不要闭门造车, 一种水声定位系统的声速修正方法 葛 亮1,吴怀河2 (1.中国海洋大学工程学院,山东青岛 266071;2.东阿县水利局,山东东阿 252000) 摘要:海水中声速沿深度方向分布较为复杂,致使准确定位难以实现。为提高定位精度,必须进行声速修正。提出了一种查表法,建立有效声速表进行声速迭代修正,此方法适用于各种定位系统。 关键词:水声定位;声速修正;有效声速 中图分类号:S625.5;S153.4 文献标识码:A 文章编号:1000-2324(2006)04-0647-04 收稿日期:2005-3-20 作者简介:葛亮(1981- )男,山东泰安,硕士,研究方向为水声定位。 CORRECTI ON OF SOUND VELOCITY I N ACOU STI C P O SI TION I NG SYSTE M Ge L iang 1,WU H ua i-he 2 (1.Engi n eeri ng I n stitute ,Ocean Un i v .of Ch i n a ,Q i ngdao 266071 2.W ater C onservan cy B ureau ofDonge ,252000,Ch i n a) Abst ract :I n sea w ater it is hard to achieve accurate location because o f the sound velocity vary i n g w ith depth .So the correction of sound ve loc ity must be considered carefully to get a better positi o n accuracy .ESV (E ffective Sound V elocity )and A tab le-look -up m ethod i s estab lished for correcti n g the sound ve loc ity by buildi n g up a ESV (E ffective Sound Ve loc ity)table .The m ethod can be applied to all k i n ds o f positi o ning sys te m s . K ey W ords :Acoustic positi o n i n g ;Correction o f sound velocity ;ESV 在利用时延进行距测量的水声定位系统中,一般是将水下目标点到各接收点的传播时延与声速相乘来计算目标与个接收点的距离差,从而求解目标坐标实现定位。由于水下沿深度方向存在声速梯度,导致声线发生弯曲。为提高定位精度,实现精确定位,必须进行声速修正。 1 海水中的声传播速度 海水是一种非均匀介质,声传播速度不为常数,由实验结果和理论分析,已得出了一些表示声速与温度、盐度和深度的方程。式(1)是其中一个典型的式子 [1] c =1449+4.6T -0.055T 2+0.0003T 3+(1.39-0.012T )(S -35)+0.017T (1) 式中,c 为海水声速(米/秒),T 为温度( ),S 为盐度,Z 为深度。海水的盐度和温度本身也是深度的函数,为研究方便,将声速视为深度的函数。在分层海洋介质中,由于声速梯度没有水平方向的变化,因此声线在传播时的掠射角只是深度的函数,故声线将随深度变化而发生弯曲。图1为深海的典型声速剖面 图[2]。在浅海,声速随深度的变化受到更多因素的影响,因而其规律性不如深海那样明显。应该说明,声速在水平方向也是变化的,只是这种变化十分缓慢,在数十千米范围内通常忽略不计。2 水声定位测距原理 图2所示为一常规定位问题。图中,O (x,y,z )为定位目标,N 个传感器所在位置为(x i ,y i ,z i ),i =1, N 。通过对目标与传感器之间脉冲信号的时间测量来实现对目标O 点的坐标位置解算,实现定位。 山东农业大学学报(自然科学版),2006,37(4):647-650Journa l o f Shandong A g ricu lt ura lU n i versity (N atura l Sc i ence) 人工智能之机器学习常见算法 摘要机器学习无疑是当前数据分析领域的一个热点内容。很多人在平时的工作中都或多或少会用到机器学习的算法。这里小编为您总结一下常见的机器学习算法,以供您在工作和学习中参考。 机器学习的算法很多。很多时候困惑人们都是,很多算法是一类算法,而有些算法又是从其他算法中延伸出来的。这里,我们从两个方面来给大家介绍,第一个方面是学习的方式,第二个方面是算法的类似性。 学习方式 根据数据类型的不同,对一个问题的建模有不同的方式。在机器学习或者人工智能领域,人们首先会考虑算法的学习方式。在机器学习领域,有几种主要的学习方式。将算法按照学习方式分类是一个不错的想法,这样可以让人们在建模和算法选择的时候考虑能根据输入数据来选择最合适的算法来获得最好的结果。 监督式学习: 在监督式学习下,输入数据被称为训练数据,每组训练数据有一个明确的标识或结果,如对防垃圾邮件系统中垃圾邮件非垃圾邮件,对手写数字识别中的1,2,3,4等。在建立预测模型的时候,监督式学习建立一个学习过程,将预测结果与训练数据的实际结果进行比较,不断的调整预测模型,直到模型的预测结果达到一个预期的准确率。监督式学习的常见应用场景如分类问题和回归问题。常见算法有逻辑回归(LogisTIc Regression)和反向传递神经网络(Back PropagaTIon Neural Network) 非监督式学习: 在非监督式学习中,数据并不被特别标识,学习模型是为了推断出数据的一些内在结构。常见的应用场景包括关联规则的学习以及聚类等。常见算法包括Apriori算法以及k-Means 算法。 半监督式学习: 在此学习方式下,输入数据部分被标识,部分没有被标识,这种学习模型可以用来进行预 十种有效学习方法总结 1.联系学习法 唯物辩证法认为世界上任何事物都是同周围的事物存在着相互影响、相互制约的关系。科学知识是对客观事物的正确反映,因此,知识之间同样存在着普遍的联系,我们把联系的观点运用到学习当中,会有助于对科学知识的理解,会起到事半功倍的效果。 根据心理学迁移理论,知识的相似性有利于迁移的产生,迁移是一种联系的表现,而联系学习法的实质不能理解为仅仅只是一种迁移。迁移从某种意义上说是自发的,而运用联系学习法的学习是自觉的,是发挥主观能动性的充分体现,它以坚信知识点必然存在联系为首要前提,从而有目的地去回忆、检索大脑中的信息,寻找出它们间的内在联系。当然,原来对知识掌握的广度与深度直接影响到建立知识间联系的数量多少,但我们可以通过辩证思维,通过翻书、查阅、甚至是新的学习,去构建新的知识联系,并使之贮存在我们的大脑之中,使知识网日益扩大。这一点是迁移所不能做到的。 学习新知识就要想到旧知识,想到自己亲身经历过的事,不能迷信权威,克服定势思维。把抽象的知识具体化,发挥右大脑的作用。如辛亥革命发生在19xx年,二次革命发生在19xx 年,护国战争发生在 1915年,护法战争发生在1917年,这四个历史事件依次间隔二年,只要记住这两个历史事件的逻辑顺序,知道其中任何一个事件的年代,就可以联想,推算出其它三个事件的年代。这是联想记忆法。 读书之法,既先识得他外面一个皮壳,又须识得他里面骨髓方好。——朱熹 2.归纳学习法 所谓归纳学习法是通过归纳思维,形成对知识的特点、中心、性质的识记、理解与运用。当然,作为一种学习方法来说,归纳学习法崇尚归纳思维,但它不等同于归纳思维本身,同时它还要以分析为前提。[page] 可见,归纳学习法指的是要善于去归纳事物的特点、性质,把握句子、段落的精神实质,同时,以归纳为基础,搜索相同、相近、相反的知识,把它们放在一起进行识记与理解。其优点就在于能起到更快地记忆、理解作用。 研究必须充分地占有材料,分析它的各种发展形式,探寻这些形式的内在联系。——马克思 3.缩记学习法 所谓缩记法就是要尽可能地压缩记忆的信息量,同时基本上又能记住应记的内容。比如有要点记忆法、归纳记忆法、意义记忆法,都属压缩记忆法。每段话有明确要点的自然用要点记忆法,如果没有就要经过归纳形成要点后进行记忆。而归纳的最主要方法以意义为依据。可见,记忆以要点为基本单位。也可理解为以中心思想为单位。记住了要点并不是要放弃其 醇的制备方法总结 彭杰 一、烯烃的水合 二、硼氢化——氧化反应 硼氢化反应的特点是步骤简单,副反应少和生成醇的产率高,该反应是实验室制备醇的一种有用的方法。通过骗人那感情化反应所得的醇恰巧和烯烃直接催化与水加成得到的醇相反,相当于水和碳碳双键的反马氏规则加成产物,这是用烯烃为原料的任何其他方法所难以获得的。 三、羟汞化——脱汞反应 此反应相当于烯烃与水按马氏规则进行加成,反应具有高度的位置选择性,而且,此反应速率快,反应条件温和,无重排产物且产率高。 四、醛、酮与格氏试剂反应 1、格氏试剂与甲醛作用得到伯醇 2、格氏试剂和其他醛作用,得到仲醇 3、格氏试剂与酮作用生成叔醇 五、醛、酮与水加成 六、由醛、酮还原 醛加氢还原成伯醇 酮加氢还原成仲醇 七、格氏试剂与环氧乙烷作用 H C OH H R O R +R /MgX R R C OMgX R R /H 2O H R C OH R R / 生成比格氏试剂多两个碳的伯醇 八、环氧乙烷与水反应 九、由卤代烃水解 对仲和叔卤代烃来说,为避免在碱性条件下容易失去卤化氢生成烯烃,在水解时常用像碳酸钠、悬浮在水中的氧化银等较缓和的碱性试剂。 在一般情况下,醇比卤代烃容易得到,因此常用醇来合成卤代烃,只有在相应的卤代烃比醇容易的到时才采用这种方法。 十、醚的水解 十一、坎尼扎罗反应 十二、酯的水解、醇解、氨解 十三、酯与格氏试剂反应 十四、酯的还原 总结:制备醇的方法多种多样,一般实验室制备醇所用的方法有:1、由烯烃制备(1)烯烃的水合(2)硼氢化——氧化反应乙硼烷和烷基硼在空气中可自燃,一般不预先制好.2、由醛、酮、环氧乙烷制备(1)醛、酮与格氏试剂反应在进行反应时,卤代烃、醛、酮和用作溶剂的醚必须仔细的干燥。在实验开始前,一起必须完全干燥,同事使反应系统与空气中水气、氧和二氧化碳隔绝。最后水解一步用稀的无机酸(硫酸、盐酸),因为这样可将难处理的胶状物质转变成水溶性的镁盐。(2)环氧乙烷与格氏试剂反应(3)由醛、酮还原 高中高效方法总结 学习方法是通过你自己的体会总结的,比如你在什么时候能学进去?平时学到什么时候就不想学了?是先学语数外,还是其他的(文理不同)?对哪门比较感兴趣?等等这些小问题,先弄清楚。 然后根据你的具体情况,制定学习计划,合理分配你的时间,哪门学的比较好,就不要下太大工夫,保持住就好了;哪门不行,就要力争让它不拉分。题不再多做,而要精做,要理解。量的多少是决定你熟练程度的。 最重要的是,持之以恒。然后迎接考试,这就是检验一下你的成果,如果你确实努力了,但是成绩还是不理想,那就考虑是不是方法不适合你。 反正无论怎么改,都是克服你自己的过程,如果不能吃点苦,耐心坐下来看书,那什么方法也不会有效的。 为什么有些同学要玩得尽兴,学习成绩却很拔尖?为什么有些同学天天埋头苦读,考试成绩却不理想?一个很重要的原因就是学习方法的正确与否。根据多年来对一批成绩优异学生的学习方法总结,得出“六先六后”的学习方法。 一、先计划后学习 学习是一个系统工程,是由浅入深、由少到多、逐步深入的过程。只有订好计划再学习,学习才是有计划、有目的、有针对性的,才能克服学习中的盲目性、忙乱性。 二、先预习后听讲 有的同学认为,反正老师要讲,课前预习是多余的;有些则认为,反正有些内容看不懂,预习等于“瞎子点灯白费蜡”……这些看法往往是造成学习成绩下降的原因之一。关教授说,首先,预习是课前“侦察”,可打有准备之仗;其次,预习可使新旧知识联系,有利于掌握新知识;再次,预习可以克服听课的盲目性,提高学习效率;最后,预习可使听课更专心,与老师配合更默契,从而提高自学能力。此外,预习的科目以自己学习上有困难的基础学科为主,每天预习所花的时间,要服从整体计划。 三、先复习后做作业 古人云:“温故而知新”。复习是巩固、消化和深化学习内容的重要环节,回家后应把当天学的知识认真复习一遍,该记的记下来,该理解的理解透了,然后再做作业。做作业时,第一不要看书,第二不要问别人,第三要有时间限制,只有这样,作业才有实际价值。假如每次作业都是先复习,然后像考试一样对待,那就等于一天一次考试,就不会出现作业100分、考试答不上来的情况了。 四、先调整心态后参加考试 考试的心态非常重要,同样水平的孩子,以不同的心态走入考场就会有不同的结果。心态良好、斗志昂扬就会促进思维,临场发挥就好;心态不好、紧张焦虑就会抑制思维,临场发挥就不佳,所以考前一定要调整好心态。 五、先独立思考后请教别人 没有独立思考是学不好知识的。思考可以对知识理解得更深刻,可以使所学的东西更扎实,可以使大脑变得更灵活。所谓学问,就是要又学又问。问是读书的钥 一、水声定位技术简介 自从1912年在美国出现了第一台水声测深仪以后,开始有了水声助航设备。二战中,对水下目标的探测和测量受到了重视,并在战后得到了迅速的发展。1958年,美国华盛顿大学应用物理实验室在达波湾建成了三维坐标跟踪水下武器靶场。这种水下定位跟踪技术在六十年代后期得到广泛应用,成为鱼雷靶场的主要测试方法。迄今为止,国内外水下武器靶场使用的水下定位跟踪系统有多种类型,按其安装方式可分为固定式跟踪系统、活动式(船载)跟踪系统和轻便式跟踪系统。固定式跟踪系统的水下测量设备大多数固定在海底,其范围大、费用高,只能在固定海区使用;活动式跟踪系统的全部设备都固定安装在活动平台上,试验时随活动平台开往试验海区;轻便式跟踪系统的体积和重量相对较小,可以随时布放和回收,并可通过飞机、车辆和船只从一个试验区运送到另一个试验区。这三种水下定位跟踪系统虽然在结构上有较大差别,但在原理上均是依赖于几何原理的水声学定位方法。根据接收基阵的基线可以将水声定位技术分为三类:长基线(LongBase-Line)、短基线(Short Base-Line)、超短基线(Ultra Short Base-Line)。表1.1列举了这三种水声定位技术的典型基线长度。 目标声源到各个基元间的距离确定目标的位置。短基线水声定位系统的基阵长度一般在几米到几十米的量级,利用目标发出的信号到达接收阵各个基元的时间差,解算目标的方位和距离。超短基线定位系统的基阵长度一般在几个厘米到几十厘米的量级,它与前两种不同,利用各个基元接收信号间的相位差来解算目标的方位和距离。 若按照工作方式来划分,以上三种定位系统都可以选择使用同步信标工作方式或应答器工作方式。采用同步信标工作方式,要求在待测目标或测量船上都安装高精度同步时钟系统,信标按规定的时刻定时发射信号,并据此确定目标位置。应答器工作方式要求在应答和测量船上都安装询问(应答)发射机和接收机。 通常所说的水声定位系统所测得的目标位置统)结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。坐标,都是相对于某一参照物的位置而言。这个参照物有时就是基阵的载体(通常相对坐标系的某一个轴线和舰船的艏艉线重合),它并不真正给出目标的大地几何坐标位置。然而水声定位系统和其他的导航系统(如近年来获得广泛应用的卫星导航定位系统)结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。 二、水声定位系统 迄今为止,水下目标定位跟踪的主要手段仍是依赖于几何原理的水声学定位方法。通常用声基线的距离或激发的声学单元的距离来对声学定位系统进行分类。水声定位系统,根据所实施的原理和测量手段不同,又可分为“方位--方位”、“方位--距离”和“距离--距离”三种测量系统。大部分的长基线、短基线系统都属于后者。距离测量水声定位系统是通过测量水下声源所辐射的声信号从发射到接收所经历的时间及声速来确定声源到各接收点的距离,从而实现对目标进行定位的。 机器学习常见算法分类汇总 ?作者:王萌 ?星期三, 六月25, 2014 ?Big Data, 大数据, 应用, 热点, 计算 ?10条评论 机器学习无疑是当前数据分析领域的一个热点内容。很多人在平时的工作中都或多或少会用到机器学习的算法。这里IT经理网为您总结一下常见的机器学习算法,以供您在工作和学习中参考。 机器学习的算法很多。很多时候困惑人们都是,很多算法是一类算法,而有些算法又是从其他算法中延伸出来的。这里,我们从两个方面来给大家介绍,第一个方面是学习的方式,第二个方面是算法的类似性。 学习方式 根据数据类型的不同,对一个问题的建模有不同的方式。在机器学习或者人工智能领域,人们首先会考虑算法的学习方式。在机器学习领域,有几种主要的学习方式。将算法按照学习方式分类是一个不错的想法,这样可以让人们在建模和算法选择的时候考虑能根据输入数据来选择最合适的算法来获得最好的结果。 监督式学习: 在监督式学习下,输入数据被称为“训练数据”,每组训练数据有一个明确的标识或结果,如对防垃圾邮件系统中“垃圾邮件”“非垃圾邮件”,对手写数字识别中的“1“,”2“,”3“,”4“等。在建立预测模型的时候,监督式学习建立一个学习过程,将预测结果与“训练数据”的实际结果进行比较,不断的调整预测模型,直到模型的预测结果达到一个预期的准确率。监督式学习的常见应用场景如分类问题和回归问题。常见算法有逻辑回归(Logistic Regression)和反向传递神经网络(Back Propagation Neural Network) 非监督式学习: 在非监督式学习中,数据并不被特别标识,学习模型是为了推断出数据的一些内在结构。常见的应用场景包括关联规则的学习以及聚类等。常见算法包括Apriori算法以及k-Means算法。 半监督式学习: 一、烯烃的水合 二、硼氢化——氧化反应 硼氢化反应的特点是步骤简单,副反应少和生成醇的产率高,该反应是实验室制备醇的一种有用的方法。通过骗人那感情化反应所得的醇恰巧和烯烃直接催化与水加成得到的醇相反,相当于水和碳碳双键的反马氏规则加成产物,这是用烯烃为原料的任何其他方法所难以获得的。 三、羟汞化——脱汞反应 此反应相当于烯烃与水按马氏规则进行加成,反应具有高度的位置选择性,而且,此反应速率快,反应条件温和,无重排产物且产率高。 四、醛、酮与格氏试剂反应 H 2C CH 2 + H 2O CH 3CH 2OH H 2C CHCH 3 (BH 3)2 H O HO CH 3CH 2CH 2OH H 2C CHCH 2CH 3 22CH3CH2CHCH 2HgOAc OH NaBH 4 CH 3CH 2CHCH 3 OH 1、格氏试剂与甲醛作用得到伯醇 2、格氏试剂和其他醛作用,得到仲醇 3、格氏试剂与酮作用生成叔醇 五、醛、酮与水加成 六、由醛、酮还原 醛加氢还原成伯醇 O H + R MgX H C OMgX H H 2O H H C OH H R O H + R /MgX R R C OMgX H R / H 2O H R C OH H R / O R + R /MgX R R C OMgX R R / R C OH R R / O R /+ H 2O R OH R / OH R O C H H + H 2O C OH OH H H C O R H + H 2 Ni R CH 2OH C O R R / + H 2 Ni R C H R / OH 快速提分之有效学习方法总结 一、打好基础,找准考点 考生在着手复习前,可以根据自己所报考学段和学科,将3周的时间分配到各门考试科目里去,对于内容较多的章节可以适当多分配时间。以考小学教师资格为例,小学教师资格考试内容包括综合素质和教育教学知识与能力,第1周可以主要看综合素质,第2-3周主要看教育教学知识与能力,其中分配一周的时间看教育理论基础,因为这是考试的重点内容。 在基础复习的过程中,不仅要了解具体知识内容,还要区分各章节各知识点的重要度层次。例如,在所有章节中,最重要的或者最难的章节和知识点是哪些,次重要的章节和知识点是哪些,再次重要的是哪些。然后依据整理的结果,建构针对教师资格考试的每一章节和每一科目的整体框架和知识点,以便为下一轮复习做准备。 二、强化提高期 有了第一阶段的学习准备和理论基础,这一阶段可以进行“题——知识点——题”的交叉综合强化练习。利用练习题或模拟题,来达到对知识点的巩固和掌握,避免出现能背得出知识点,却不会做题的现象;另外获得对知识点的彻底理解,下次做题就不会出现模糊或模棱两可的局面。 同时,利用题目,大家可以对第一阶段总结出的知识点进行查缺补漏,完善形成于脑海的知识网络。而且,大家要从题目中总结做题技巧,特别是论述题、案例分析题和教学设计题。 三、冲刺等待期 这一阶段的任务首先是巩固前两个阶段的学习成果,每天抽出一定的时间回顾一遍头脑里的知识网络,在回顾的同时要明确哪些常考,以什么形式考,哪些地方自己容易出错等等,在前两个阶段的复习努力上,这些都要做到胸有成竹。 另外,有条件的话,每天定时模拟考试,做一套模拟题,保持自己的做题状态,才能在考场上发挥自如。 这一阶段,保持良好的心态也是非常重要的,有的考生其实复习得很好了,可因为自己的担心害怕,在考场就不能发挥正常水平。因此,要保持一个好的稳定的心态,相信自己的付出,抱着平常心,等待检验自己复习成果的那一刻。 关于水声被动定位技术及其发展趋势 导读:世界各国都加紧了对被动定位技术的研究和开发。匹配场声源定位是国际上新兴的水声定位方法。水下GPS技术的设计灵感来自于GPS,该技术可以用于潜艇定位。动目标分析,水声被动定位技术及其发展趋势。关键词:被动定位,匹配场,水下GPS,动目标分析 1.引言声纳按照工作方式一般分为主动声纳 和被动声纳。对于被动声纳,由于它不发射声波,它具有很好的隐蔽性,且具有作用距离远、不容易被发现等优点,在军事领域中有着很好的应用前景。近年来,世界各国都加紧了对被动定位技术的研究和开发,被动定位技术受到广泛的重视。随着水中兵器作用距离和打击精度的提高,对被动声纳的定位性能提出了更高的要求,远程定位问题引起人们的广泛关注,出现了多种新型的定位方法。 2.传统被动声纳定位技术及面临的问题 传统的被动定位技术 传统的水声被动定位技术是六十年代研究开发出来的,这类定位技术利用沿不同距离路径传播的水下声脉冲间的时间差或相位差对水面、水中目标进行定位,其典型代表就是三子阵法和球面内插法。三子阵被动测距方法是己经实用化了的被动定位技术,它是六十年代后期出现的噪声测距方法。它利用时延估计技术求出到达三个基阵的相对时延,然后得到目标的方位和距离。但是,三子阵定位方法对水声信道进行了简化,三子阵系统是在同一平面内进行定位的,它不考虑信道声速的垂直分布,也不考虑信道的多途效应。,动目标分析。,动目标分析。不过这种定位方法算法简单,而且对近距离声源定位能达到较高的精度,目前在工程上已经得到广泛应用。 传统被动声纳定位技术面临的问题 传统被动定位方法在理论和实际应用中都存在很大的缺陷,主要表现在以下两个方面。 远程定位精度不高 传统的被动定位方法,利用球面波或柱面波波前曲率的变化,通过测量各基元的相对时延,估计目标的距离和方位。测距精度与时延估计精度、目标距离、方位、基阵孔径、基阵安装精度等因素有关,其中时延测量精度是关键,然而对于 药剂学---制备方法总结: 一、软膏剂: 1、研和法:小剂量 2、熔和法:大剂量 3、软化法 二、栓剂 1、热熔法 2、冷压法 三、软胶囊剂 1、滴制法 2、压制法 四、小丸 1、沸腾制粒法 2、喷雾制粒法 3、包衣锅法 4、挤出滚圆法 5、离心抛射法 6、液中制粒法 五、气雾剂 1、压灌法 2、冷灌法 六、膜剂 均浆制膜法 热塑膜法 复合制膜法 七、混悬剂 1、分散法 2、凝聚法 ①、物理凝聚法 ②、化学凝聚法 八、微囊 ①物理化学法:单凝聚法、复凝聚法、溶剂-非溶剂法、改变温度法、液中干燥法 ②物理机械法:喷雾干燥法、喷雾冻凝法、空气悬浮包衣法、多孔离心法、锅包衣法 ③化学法:界面缩聚法、辐射交联法 九、包合物 ①饱和水溶液法(重结晶法、共沉淀法) ②研磨法(捏合法) ③冷冻干燥法——注射用包合物 ④喷雾干燥法——工业大生产饱和水溶液法(重结晶法、共沉淀法) ⑤研磨法(捏合法) ★背记技巧★冷喷饱研 包合物的验证 相溶解度法 X-射线衍射法 热分析法 红外光谱法 核磁共振法 荧光光谱法 十、固体分散物 ①熔融法:热敏药物、熔点较低载体 ②溶剂法:共沉淀物 ③溶剂-熔融法:小剂量或液态药物 ④溶剂-喷雾/冷冻干燥法:热敏药物 ⑤研磨法:小剂量药物 固体分散物的验证 热分析法 X-射线衍射法 红外光谱法 核磁共振法 溶解度与溶出速度法 包合物的验证 相溶解度法 X-射线衍射法 热分析法 红外光谱法 核磁共振法 荧光光谱法 十一、糖浆剂 溶解法 混合法 十二、芳香水剂 溶解法 稀释法 十三、甘油剂 溶解法(碘甘油) 化学反应法(硼酸甘油)十四、醑剂 溶解法 蒸馏法 十五、溶胶剂 1.分散法: ①机械分散法 ②胶溶法 ③超声分散法 2.凝聚法: ①物理凝聚法 有效的学习方法总结 篇一:十种有效的学习方法 每个人都会有许多学习方法,这些方法构成了自己的一个学法体系,因此,只要优化了自己的学法体系,必定大大提高学习效果,使学习真正快速有效。我们吸收各种学习理论的基本观点,并总结了优秀的学习经验,现在特别推荐下列十大学习方法,作为学法体系的支柱。 1、目标学习法 掌握目标学习法是美国心理学家布卢姆所倡导的。布卢姆认为只要有最佳的教学,给学生以足够的时间,多数学习者都能取得优良的学习成绩。 教学内容是由许多知识点构成,由点形成线,由线完成相对独立的知识体系,构成彼此联系的知识网。因此明确目标,就要在上新课时了解本课知识点在知识网中的位置,在复习时着重从宏观中把握微观,注重知识点的联系。另外,要明确知识点的难易程度,应该掌握的层次要求,即识记、理解、应用、分析、综合、评价等不同层次,最重要的就是明确学习重要目标,即知识重点。有了目标能增强我们学习的注意力与学习动机,即为了这目标我必须好好学习。 可见,明确学习目标是目标学习法的先决条件。目标学习法的核心问题,是必须形成自我测验、自我矫正,自我补 救的自我约束习惯。对应教学目标编制形成性检测题,对自己进行检测,并及时地反馈评价,及时矫正和补救。 学习目标与人生目标不同,它比较具体,可以在短时间内实现。它可以使我们比较容易地享受成功的欢乐。增加我们的信心。因此,目标学习法也是成功教育的主要策略之一,同时,实现学习目标也是实现人生目标的开始,只有使大小、远近目标有机的结合,才会避免一些无效劳动的发生。 诗人的创造,哲学家的辩证,探险家的技艺――这就是组成一个伟大科学家的材料。 ――季米里亚捷夫 2、问题学习法 带着问题去看书,有利于集中注意力,目的明确,这既是有意学习的要求,也是发现学习的必要条件。心理学家把注意分为无意注意与有意注意两种。有意注意要求预先有自觉的目的,必要时需经过意志努力,主动地对一定的事物发生注意。它表明人的心理活动的主体性和积极性。问题学习法就是强调有意注意有关解决问题的信息,使学习有了明确的指向性,从而提高学习效率。 问题学习法要求我们看书前,首先去看一下课文后的思考题,一边看书一边思考;同时,它还要求我们在预习时去寻找问题,以便在听课时在老师讲解该问题时集中注意力听 机器学习复习总结 选择目标函数的表示选择函数逼近算法最终设计选择训练经验第一个关键属性,训练经验能否为系统的决策提供直接或间接的反馈第二个重要属性,学习器在多大程度上控制样例序列第三个重要属性,训练样例的分布能多好地表示实例分布,通过样例来衡量最终系统的性能最终设计执行系统用学会的目标函数来解决给定的任务鉴定器以对弈的路线或历史记录作为输入,输出目标函数的一系列训练样例。泛化器以训练样例为输入,产生一个输出假设,作为它对目标函数的估计。实验生成器以当前的假设作为输入,输出一个新的问题,供执行系统去探索。第二章一致,满足,覆盖的定义:一致:一个假设h与训练样例集合D一致,当且仅当对D中每一个样例 策树空间能够表示定义在离散实例上的任何离散值函数)n 从根向下推断决策树,为每个要加入树的新决策分支贪婪地选择最佳的属性。n 归纳偏置,优先选择较小的树观察ID3的搜索空间和搜索策略,认识到这个算法的优势和不足假设空间包含所有的决策树,它是关于现有属性的有限离散值函数的一个完整空间维护单一的当前假设(不同于第二章的变型空间候选消除算法)不进行回溯,可能收敛到局部最优每一步使用所有的训练样例,不同于基于单独的训练样例递增作出决定,容错性增强ID3和候选消除算法的比较ID3的搜索范围是一个完整的假设空间,但不彻底地搜索这个空间候选消除算法的搜索范围是不完整的假设空间,但彻底地搜索这个空间ID3的归纳偏置完全是搜索策略排序假设的结果,来自搜索策略候选消除算法完全是假设表示的表达能力的结果,来自对搜索空间的定义过度拟合:对于一个假设,当存在其他的假设对训练样例的拟合比它差,但事实上在实例的整个分布上表现得却更好时,我们说这个假设过度拟合训练样例定义:给定一个假设空间H,一个假设h?H,如果存在其他的假设h’?H,使得在训练样例上h的错误率比h’小,但在整个实例分布上h’的错误率比h小,那么就说假设h过度拟合训练数据导致过度拟合的原因 1、一种可能原因是训练样例含有随机错误或噪声 2、特别是当少量的样例被关联到叶子节点时,很可能出现巧合的规律性,使得一些属性恰巧可以很好地分割样例,但却与实 高纯氧化镁制备方法 1.卤水制备氧化镁 1.1石灰法 将氯化镁溶液与煅烧石灰石(或白云石)灰乳反应生成氢氧化镁,煅烧得氧化镁。 此法会产生1t镁砂会产生2.76吨CaCl2,如果不能对其进行有效利用,会造成新的废物堆积,只是生产不能扩大。 1.2碳铵法 碳酸氢铵(或二氧化碳和氨)同氯化镁溶液反应生成碱式碳酸镁,经煅烧得到氧化镁。 该法以碳酸氢氨为原料,蒸发水量大,势必耗能较大,生产成本较高。如果能够利用合成氨工厂排放的二氧化碳及中间产品氨为原料,可降低其成本。 1.3氨法 将水氯化镁石(或老卤)与液氨加入晶种沉镁,沉淀经洗涤、烘干、煅烧得到氧化镁产品。 此法沉镁效率可达80%-85%,氨转化率可达80%,产品中氧化镁质量分数在99%以上,副产品NH4Cl可作为化肥化工原料,而且无三废,基本无污染。如在沉镁过程中添加特殊晶种核心,可产生超细氧化镁、磁性氧化镁和空气氧化镁等等。 1.4纯碱法 将卤水与纯碱反应,生成碱式碳酸镁沉淀,洗涤脱水后煅烧,制得氧化镁。 此法制得的氧化镁产品纯度较高,工艺简单,能耗小,但使用纯碱会使成本过高。 以上方法都在液相中反应,通过加入沉淀剂、洗涤剂和化学精制等方法除去杂质离子,保持碱式碳酸镁或氢氧化镁的纯度,最终高纯镁砂纯度可达99.9%以上。但是卤水生产高纯镁砂成本过高,能源消耗大,生产工艺复杂,存在很多难点. 1.5水氯镁石直接热解 含水氯化镁直接在空气(或热气流)中加热,随着温度升高能逐步失去结晶水。反应方程式如下: 该法工艺流程较简单,不需消耗任何辅助原料,使生产成本降低,更易实现镁的高值化和产业化。现行方法主要有喷雾法和沸腾炉法。 1.5.1喷雾热解法 将卤水直接喷入热分解反应炉中进行热分解,煅烧后得粗氧化镁,多次水洗除去未完全分解的可溶性氯化物,粗氧化镁完全水化生成氢氧化镁,煅烧至轻质氧化镁,再重烧得到高纯镁砂,纯度可达99%以上。 喷雾法工艺流程用此法生产氧化镁具有工业规模的厂家是以色列Mishor Rotem的死海方镁石公司。此工艺的热解时间短,生产成本较低,但回收率比较低,氯化氢尾气腐蚀性强,对设备的要求很高,而且对氯化氢尾气的吸收和浓缩有很大难度。 1.5.2沸腾炉热解法 将原料经沸腾炉脱水,热解和焙烧,产品由出料管自动溢入集料缶储存。 矿石沸腾炉炉体散热较大,应采用适当的隔热保温措施,才能较低散热,提高炉子的有效热利用率。 2.固体矿制备氧化镁 2.1煅烧菱镁矿法 菱镁矿中含90%以上的碳酸镁,以及少量碳酸钙和其他微量杂质,直接煅烧便能得到纯度较 十种有效的学习方法 每个人都会有许多学习方法,这些方法构成了自己的一个学法体系,因此,只要优化了自己的学法体系,必定大大提高学习效果,使学习真正快速有效。我们吸收各种学习理论的基本观点,并总结了优秀的学习经验,现在特别推荐下列十大学习方法,作为学法体系的支柱。 1、目标学习法 掌握目标学习法是美国心理学家布卢姆所倡导的。布卢姆认为只要有最佳的教学,给学生以足够的时间,多数学习者都能取得优良的学习成绩。 教学内容是由许多知识点构成,由点形成线,由线完成相对独立的知识体系,构成彼此联系的知识网。因此明确目标,就要在上新课时了解本课知识点在知识网中的位置,在复习时着重从宏观中把握微观,注重知识点的联系。另外,要明确知识点的难易程度,应该掌握的层次要求,即识记、理解、应用、分析、综合、评价等不同层次,最重要的就是明确学习重要目标,即知识重点。有了目标能增强我们学习的注意力与学习动机,即为了这目标我必须好好学习。 可见,明确学习目标是目标学习法的先决条件。目标学习法的核心问题,是必须形成自我测验、自我矫正,自我补救的自我约束习惯。对应教学目标编制形成性检测题,对自己进 行检测,并及时地反馈评价,及时矫正和补救。 学习目标与人生目标不同,它比较具体,可以在短时间内实现。它可以使我们比较容易地享受成功的欢乐。增加我们的信心。因此,目标学习法也是成功教育的主要策略之一,同时,实现学习目标也是实现人生目标的开始,只有使大小、远近目标有机的结合,才会避免一些无效劳动的发生。 2、问题学习法 带着问题去看书,有利于集中注意力,目的明确,这既是有意学习的要求,也是发现学习的必要条件。心理学家把注意分为无意注意与有意注意两种。有意注意要求预先有自觉的目的,必要时需经过意志努力,主动地对一定的事物发生注意。它表明人的心理活动的主体性和积极性。问题学习法就是强调有意注意有关解决问题的信息,使学习有了明确的指向性,从而提高学习效率。 问题学习法要求我们看书前,首先去看一下课文后的思考题,一边看书一边思考;同时,它还要求我们在预习时去寻找问题,以便在听课时在老师讲解该问题时集中注意力听讲;最后,在练习时努力地去解决一个个问题,不要被问题吓倒,解决问题的过程就是你进步的过程。 3、矛盾学习法 矛盾的观点是我们采用对比学习法的哲学依据因为我 材料制备方法重点整理 第1章单晶材料的制备 1.单晶材料的四种制备方法 ①气相法生长单晶vapor phase ②溶液法生长单晶aqueous phase ③熔体法生长单晶melt ④熔盐法生长单晶molten flux 2. 气相法生长单晶 ①升华Sublimation- Condensation:将固体沿着温度梯度通过,晶体在管子的冷端从气相中 生长的方法。【常压升华(约1atm):As、P、CdS 减压升华(<1atm): ZnS、CdI2、HgI2】②蒸气运输法Vapor transport growth:在一定的环境相下,利用载气来帮助源的挥发和输运, 从而促进晶体生长的方法。(常用载气:卤素W+3Cl2→WCl6) ③气相反应法Vapor reaction growth:各反应物直接进行气相反应从而生成晶体的方法。 例:GaCl3+AsCl3+H2→3GaAs + 6HCl 3. 溶液法生长单晶 ①溶液蒸发法:通过溶剂挥发的手段促进晶体析出 ②溶液降温法:在较高温度下制备出饱和溶液,利用溶解度随着温度下降而降低的 原理,促进晶体析出 ③水热法:在高温高压下的过饱和水溶液中生长单晶的方法。主要装置为:高压釜。 例子:水晶,刚玉,方解石,氧化锌以及一系列的硅酸盐,钨酸盐和石榴石等。 ④温差水热法:高压釜内部因上下部分的温差产生对流,将高温的饱和溶液带至籽 晶区形成过饱和溶液而结晶。冷却析出部分溶质的溶液又流向高温区,溶解原料。 循环往复至单晶生长完成。(图见右) 4. 熔体法生长单晶 ①提拉法Czochralski method(会画示意图) 提拉法是将构成晶体的原料放在坩埚中加热熔化,在 熔体表面接籽晶提拉熔体,在受控条件下,使籽晶和 熔体在交界面上不断进行原子或分子的重新排列,随 降温逐渐凝固而生长出单晶体。提拉法的生长工艺首 先将待生长的晶体的原料放在耐高温的坩埚中加热熔 化,调整炉内温度场,使熔体上部处于过冷状态;然后在籽晶杆上安放一粒籽晶,让籽晶接触熔体表面,待籽晶表面稍熔后,提拉并转动籽晶杆,使熔体处于过冷状态而结晶于籽晶上,在不断提拉和旋转过程中,生长出圆柱状晶体。 优点:1)可以直接观察晶体的生长情况,为控制晶体外形提供了有利条件。 2)晶体在熔体的自由表面处生长,不与坩埚接触,能够显著减小晶体的应力,并防止坩埚壁上的寄生成核。 3)使用定向籽晶或得特定取向的单晶体,降低位错密度,提高晶体的完整性。 缺点:1)一般要用坩埚做容器,导致熔体有不同程度的污染。 2)当熔体中更含有易挥发物时,则存在控制组分的困难。 ②坩埚法Bridgeman method(会画示意图) 熔体在坩埚中逐渐冷却而生长单晶,坩埚可以垂直 或水平放置。制备过程为,在一定的温度梯度场中 移动坩埚,或者坩埚固定,移动加热炉或者降温。 优点:设备相对简单,生长很大直径单晶,形状可 通过设计坩埚来限制,可以在封闭体系中进行,防 止挥发性物质挥发。水声定位算法学习总结
学习方法总结
一种水声定位系统的声速修正方法
人工智能之机器学习常见算法
十种有效学习方法总结
醇的制备方法总结
高中高效学习方法总结
水声定位基本原理与发展趋势
机器学习常见算法分类汇总
醇的制备方法总结
快速提分之有效学习方法总结
关于水声被动定位技术及其发展趋势-模板
药剂学---制备方法总结
有效的学习方法总结
机器学习复习总结
高纯氧化镁的制备方法汇总
(完整版)十种有效的学习方法
材料制备方法 考点总结