数字图像稳像算法研究

收稿日期:2007-06-06 修回日期:2007-07-03
第25卷 第7期
计 算 机 仿 真
2008年7月
文章编号:1006-9348(2008)07-0200-05
数字图像稳像算法研究
刘玉红,涂丹
(国防科学技术大学信息系统与管理学院,湖南长沙410073)
摘要:介绍了数字图像稳像算法的整个流程,包括三部分:运动估计、运动决定和运动补偿。重点介绍了运动估计算法和运动补偿中的滤波算法;详细阐述了几种最基本的运动估计算法,其它的运动估计算法可以通过这些基本算法延伸发展得到;列出了三种常用的滤波算法:中值滤波、kal m an 滤波和二次B 样条曲线法,应用于不同的场合;提出了两种方法:裁减和拼接,用来解决当前帧补偿后出现的空白区域问题。最后,展示了一种基于投影估计和kal m an 滤波的稳像算法的试验结果。通过这些方法的介绍,可以对稳像算法有更直观的了解,探讨了进一步研究的重点。关键词:电子稳像;运动估计;运动补偿;运动模型中图分类号:TP317.4 文献标识码:B
A D i g it a l I mage St ab ili za ti on A lgor ith m
L I U Yu -hong,T U Dan
(School of I nfor mati on and Management,Nati onal University of Defence Technol ogy,Changsha Hunan 410073,China )ABSTRACT:The p r ocess of digital i m age stabilizati on,which includes moti on esti m ati on,deter m inati on,and moti on compensati on,is intr oduced .Filter methods in the moti on compensati on are mephatically intr oduced .Several basic moti on esti m ati on algorith m s are circu m stantiated,fr om which other moti on esti m ati on algorith m could be devel oped .Three c mmonly used filter algorith m s i .e .the median filter,the kal m an filter and the t w o -order B -s p line -based filter are listed .Tri m m ing and mosaic,the ways for s olving the p r oble m of filling in the blank field after compensati on are intr oduced .A ls o,the experi m ent results of p r ojecti on esti m ati on &kal m an filter based stabilizati on algorith m are showed in this paper .Further challenges are f oreseen fr om these intr oducti ons .
KE YWO RD S:Electr onic i m age stabilizati on;Moti on esti m ati on;Moti on compensati on;Moti on model
1 引言
摄像机置于运动载体上时,由于载体的运动和载体机座的振动导致摄像机的晃动,拍摄的图像序列出现了抖动现象,图像的抖动很容易引起眼睛的疲劳,影响观测者对图像序列的观看和分析,也影响了图像的后续处理。为了减轻或消除这种抖动,稳定图像,已有多种稳像方法被提出。
稳像的发展已多年,经历了机械稳像、光学稳像
[1]
到目
前的电子稳像[2][3]。机械和光学稳像主要采用硬件的方法,电子稳像有两种:一是利用运动传感器检测摄像机的运动矢量再转换为图像的运动量从而进行稳像;另一种是直接利用数字图像处理技术,通过分析图像的内容,确定图像之间的运动量而进行补偿从而达到稳像目的,该方法也称为数字图像稳像,通常情况下,电子稳像都是指数字图像稳像,本文亦如此。
关于稳像的研究已经有很多,本文在前人的基础上对出
现的稳像算法进行了总结,介绍了五种基本的运动估计算法和三种常用的运动滤波算法,最后,提出了一种基于投影算法和kal m an 滤波的数字稳像算法,并展示了其试验结果。
2 数字图像稳像算法
数字图像稳像稳定的是一个图像序列,其基本原理如下图1所示
。
图1 稳像原理图
如图1所示,当没有抖动时,参考帧图像中的五角星
bl ock 和当前帧图像中的五角星bl ock1处于同一位置(当前
帧图像中的虚五角星位置)。而当存在抖动时,在当前帧中
五角星bl ock1移动到了如图所示的实五角星bl ock2位置,
bl ock 与bl ock2位置不一样,通过视频显示出来的时候就会
出现模糊,稳像的目的就是消除这种模糊,也就是将当前帧中的实五角星bl ock2移动到虚五角星bl ock1位置,使得当前帧图像与参考帧图像一样。运动估计算法就是计算当前帧中实五角星bl ock2相对于参考帧中五角星bl ock 也即是相对于bl ock1在x,y 轴方向的移动距离,运动补偿就是根据计算出的距离将当前帧的实五角星bl ock2向相反的方向移动到虚五角星bl ock1位置,使得两帧图像一样,就得到了稳定的图像序列,这就是稳像原理。
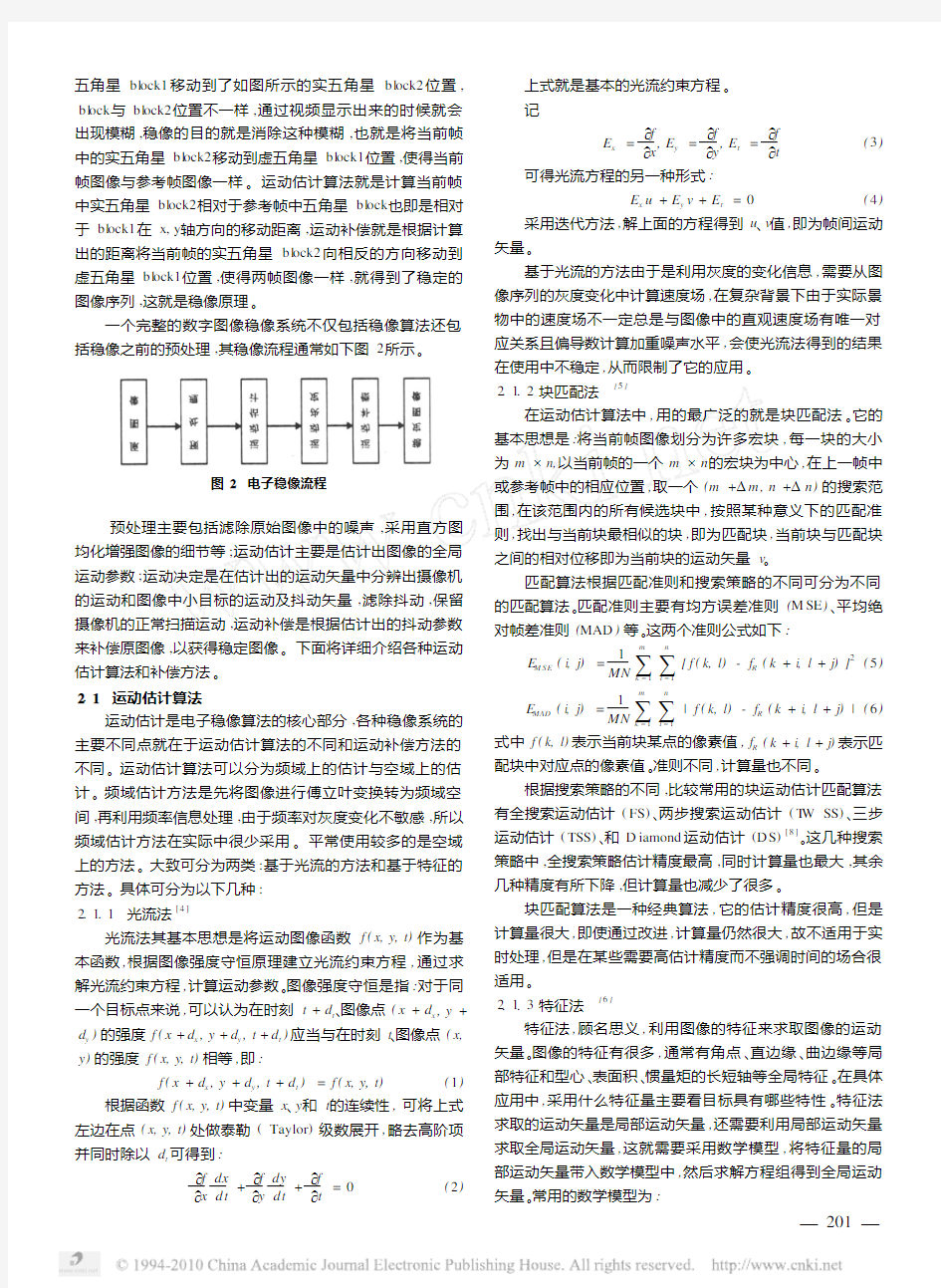
一个完整的数字图像稳像系统不仅包括稳像算法还包括稳像之前的预处理,其稳像流程通常如下图2所示
。
图2 电子稳像流程
预处理主要包括滤除原始图像中的噪声,采用直方图均化增强图像的细节等;运动估计主要是估计出图像的全局运动参数;运动决定是在估计出的运动矢量中分辨出摄像机的运动和图像中小目标的运动及抖动矢量,滤除抖动,保留摄像机的正常扫描运动,运动补偿是根据估计出的抖动参数来补偿原图像,以获得稳定图像。下面将详细介绍各种运动估计算法和补偿方法。
2.1 运动估计算法
运动估计是电子稳像算法的核心部分,各种稳像系统的主要不同点就在于运动估计算法的不同和运动补偿方法的不同。运动估计算法可以分为频域上的估计与空域上的估计。频域估计方法是先将图像进行傅立叶变换转为频域空间,再利用频率信息处理,由于频率对灰度变化不敏感,所以频域估计方法在实际中很少采用。平常使用较多的是空域上的方法。大致可分为两类:基于光流的方法和基于特征的方法。具体可分为以下几种:
2.1.1 光流法
[4]
光流法其基本思想是将运动图像函数f (x,y,t )作为基本函数,根据图像强度守恒原理建立光流约束方程,通过求解光流约束方程,计算运动参数。图像强度守恒是指:对于同一个目标点来说,可以认为在时刻t +d t 、图像点(x +d x ,y +
d y )的强度f (x +d x ,y +d y ,t +d t )应当与在时刻t 、图像点(x,y )的强度f (x,y,t )相等,即:
f (x +d x ,y +d y ,t +d t )=f (x,y,t )
(1)
根据函数f (x,y,t )中变量x 、y 和t 的连续性,可将上式左边在点(x,y,t )处做泰勒(Taylor )级数展开,略去高阶项并同时除以d t 可得到:
5f 5x dx d t +5f 5y dy d t +5f
5t
=0(2)
上式就是基本的光流约束方程。记
E x =
5f 5x ,E y =5f 5y ,E t =5f 5t
(3)
可得光流方程的另一种形式:
E x u +E y v +E t =0
(4)
采用迭代方法,解上面的方程得到u 、v 值,即为帧间运动矢量。
基于光流的方法由于是利用灰度的变化信息,需要从图像序列的灰度变化中计算速度场,在复杂背景下由于实际景物中的速度场不一定总是与图像中的直观速度场有唯一对应关系且偏导数计算加重噪声水平,会使光流法得到的结果在使用中不稳定,从而限制了它的应用。
2.1.2 块匹配法
[5]
在运动估计算法中,用的最广泛的就是块匹配法。它的基本思想是:将当前帧图像划分为许多宏块,每一块的大小为m ×n,以当前帧的一个m ×n 的宏块为中心,在上一帧中
或参考帧中的相应位置,取一个(m +Δm ,n +Δn )的搜索范围,在该范围内的所有候选块中,按照某种意义下的匹配准则,找出与当前块最相似的块,即为匹配块,当前块与匹配块之间的相对位移即为当前块的运动矢量v 。
匹配算法根据匹配准则和搜索策略的不同可分为不同的匹配算法。匹配准则主要有均方误差准则(M SE )、平均绝对帧差准则(MAD )等。这两个准则公式如下:
E M SE
(i,j )=
1
MN ∑m k =1∑
n
l =1[f (k,l )-f R (k +i,l +j )]2
(5)
E MAD (i,j )=
1MN
∑m
k =1
∑n
l =1
|
f (k,l )-f R (k +i,l +j )|(6)
式中f (k,l )表示当前块某点的像素值,f R (k +i,l +j )表示匹配块中对应点的像素值。准则不同,计算量也不同。
根据搜索策略的不同,比较常用的块运动估计匹配算法有全搜索运动估计(FS )、两步搜索运动估计(T W SS )、三步运动估计(TSS )、和D iamond 运动估计(DS )[8]。这几种搜索策略中,全搜索策略估计精度最高,同时计算量也最大,其余几种精度有所下降,但计算量也减少了很多。
块匹配算法是一种经典算法,它的估计精度很高,但是计算量很大,即使通过改进,计算量仍然很大,故不适用于实时处理,但是在某些需要高估计精度而不强调时间的场合很适用。
2.1.3 特征法
[6]
特征法,顾名思义,利用图像的特征来求取图像的运动矢量。图像的特征有很多,通常有角点、直边缘、曲边缘等局部特征和型心、表面积、惯量矩的长短轴等全局特征。在具体应用中,采用什么特征量主要看目标具有哪些特性。特征法求取的运动矢量是局部运动矢量,还需要利用局部运动矢量求取全局运动矢量,这就需要采用数学模型,将特征量的局部运动矢量带入数学模型中,然后求解方程组得到全局运动矢量。常用的数学模型为:
平移模型:
x ′y
′
=
x y +
t x t y (7)
刚性模型
:
x ′y
′
=
cos θ-sin θsin
θcos
θx y
+t x t
y (8)
相似模型:
x ′y
′
=
cos θ-sin θsin
θcos
θx y
+t x t y
(9)
仿射模型:,
x ′
=a 1x +a 2y +a 3,y ′
=a 4x +a 5y +a 6
(10)透视模型:,
x ′
=
a 1x +a 2y +a 3a 7x +a 8y +1
,y ′
=
a 4x +a 5y +a 6a 7x +a 8y +1
(11)
在真实场景中,由于环境一般非常复杂,可能存在遮挡,阴影和背景变化等,这些干扰使得特征跟踪变得困难,如果事先知道了目标的某些特征,则特征法就变得可能简单了。
2.1.4 投影法
[7]
投影法是利用图像总体灰度变化规律来确定图像运动矢量的一种方法,它不必对图像上的每一点做相关运算,而是利用图像的灰度投影曲线做一次相关运算,因此它的运算量小,运动估计速度快,容易满足实时性要求。投影法通常分为三个步骤:一是灰度映射。当前帧图像经过预处理以后,投影成为两个独立的一维波形,其投影公式如下:
G k (j )=
∑i
G
k
(i,j ) G k (i )=
∑j
G
k
(i,j )(12)
其中,G k (j ),G k (i )分别表示第k 帧图像的j 列,i 行的灰度值,G k (i,j )表示第k 帧图像(i,j )点位置处的灰度值。二是进行投影滤波。由于图像边缘信息是唯一的,当图像位移量较大时,会导致投影波形在边缘处的差异性,在进行相关计算时会对互相关峰值产生影响从而降低精度。可用余弦平方滤波器进行滤波,降低边缘信息的幅值,保留中心区域的波形,从而降低边缘信息对互相关峰值的影响,提高检测精度。在边缘信息较为粗糙时,可以去掉若干行、列的像素后再用投影法计算其运动矢量。三是矢量的提取。分别将当前帧与参考帧的行、列灰度投影波形做互相关计算,根据2条相关曲线的唯一谷值即可确定当前帧相对于参考帧的行和列的运动矢量。
一般的投影算法都是对整帧图像进行投影计算,得出的是全局运动矢量。它只考虑了平移现象,对于旋转则没有考虑。而且当图像中有摄像机的正常扫描和图像中有小目标运动时,检测的运动矢量则不是很准确,算法精度下降。为了解决这个问题,改进的投影算法被提出。一种改进算法是:将当前帧图像分为几个区域,对每个区域进行投影计算,得出局部运动矢量,再由局部运动矢量求取全局运动矢量,这样可以将小目标运动矢量剔除,通常,分的区域越小,对运动矢量的估计越有利,但是,区域一小,投影曲线的变化就不是很明显,对估计精度很有影响。因此,选择适当的大小是很有必要
的。要根据实际应用综合考虑。
2.1.5 位平面算法
[8]
位平面法是比较新的一个方法,它利用图像的灰度码和位平面来计算图像的运动矢量,该方法能够大大降低图像的计算量,提高运算速度。
一副图像的灰度可以用k 个比特来表示,对某一点(x,
y )的像素值可以表示为:
f (x,y )=a k -12k -1+a k -22k -2+…+a 222+a 121+a 02
(13)
其中,a i (0≤i ≤k -1)的值为0或者1,像素值可用比特表示为(a k -1a k -2…a 2a 1a 0),一个比特可称为一个位面,对于一幅用8比特表示的图像而言,它有8个位面,通常用0表
示最低的位面。将图像中每一个像素的第I 个比特集合在一起形成第I 个位平面,用矩阵表示为b i (x,y )。8比特表示的图像有8个位平面,分别表示为b 0(x,y ),b 1(x,y ),…,b 6(x,y ),
b 7(x,y )。但这种分解方法有缺陷就是像素灰度值的微小变
化会对位平面的复杂度产生影响。例如127和128的灰度码分别为01111111和10000000,灰度码差一级,但是8个位平面上的比特值完全不一样。因此,有必要进行改进。一种改进灰度码位平面分解方法如下:
g i =
a i a i+1 0≤i ≤k -2a i i =k -1
(14)
是异或操作。这种改进以后,相连的灰度码仅有一个比特位不同。例上述的127和128,使用改进方法后分别表示为01000000和11000000,只相差一个比特位。灰度级的变化对k 平面的影响很小。
假设使用第k 个位平面来进行运动矢量的估计。一个搜索区域为M ×N ,搜索范围为(M +2P )×(N +2P ),p 是最大搜索位移。按照如下公式进行测量:
C j (m ,n )=
1MN
∑M -1x =0∑N -1
y =0
g
T
k (x,y ) g t-1
k (x +m ,y +n )
(15)
对于搜索范围内的每一个m ,n 计算C j (m ,n ),C j (m ,n )是当前匹配区域与参考图像间的不匹配的比特数,C j (m ,n )最小时可以取得最佳匹配效果。
位平面算法只是采用简单的布尔运算与异或操作,大大节约了计算时间,提高了算法的速度。但是,由于算法只采用了一个位平面进行运算,而各个位平面包含的信息量不一样,所以必需选择一个适当的位平面进行计算才能很好的计算出运动矢量。
上面列出了各种运动估计的算法,但是,大多数算法中都是估计的局部运动矢量,而目的是要求出帧与帧之间的运动矢量,也就是全局运动矢量,因此,还必需通过局部运动矢量将全局运动矢量计算出来。各种就算方法也因此而诞生。一种最简单的方法就是选择出现概率最大的局部矢量作为全局运动矢量。也有人提出将所有局部运动矢量之和加起来求平均作为全局运动矢量或者利用给各个局部矢量加权的方法来求全局运动矢量,再或者使用各个局部矢量的中值来
作为全局运动矢量。显然,这些方法的准确度都不是很高。随着研究的深入,各种新的方法也随之出现。最典型的就是利用上述特征法中提到的数学模型进行计算求取全局运动矢量。
2.2 运动决定
得到了每帧的全局运动矢量以后,还不能直接进行补偿,需要进一步判断该矢量为抖动矢量还是抖动矢量和摄像机正常扫描运动矢量的合成。摄像机的正常扫描运动与图像的抖动是有较明显区别的。抖动是随机的,而正常扫描活动在某一短时间内,往往是向着同一个方向运动,连续多帧图像的全局运动矢量具有一定的方向性。另外扫描运动一般比较缓慢,而抖动比较快,抖动引起的运动矢量往往要大于扫描运动引起的两帧图像之间的运动矢量。根据这些特点,一种判断方法如下:
定义
T 1=
∑N
i =1
|MV (t
i+1
)-MV (t i )|,T 2=∑
N
i =1
MV (t i
)(16)
其中,T 1表示连续N 帧图像中相邻帧运动差的绝对和,
T 2表示N 帧图像的平均运动矢量,MV (t i )表示第t i 帧图像相
对于参考图像的全局运动矢量,根据下面的判别式来:
如果T 1/T 2
这只是一种较为简单的判断方法,并不适合所有的场合,正常扫描和抖动之间并没有明确的界限,往往凭人的主观感觉判定,抖动与正常扫描的判定方法还有待与进一步研究。
2.3 运动补偿
在进行判定以后,就可以根据判定情况进行补偿。当没有摄像机的正常扫描时,全局运动矢量就是抖动矢量,是需要去除的。根据全局运动矢量补偿当前帧图像,得到稳定图像。全局运动矢量如果是帧到参考帧的,则直接进行补偿。如果全局运动矢量是相邻帧之间的运动矢量,则需要将当前帧运动矢量与它前面帧的运动矢量求和,得到当前帧与参考帧的运动矢量,然后对当前帧进行补偿。
当存在摄像机的正常扫描时,需要进行滤波,求出摄像机正常扫描的运动矢量,然后由当前帧的全局运动矢量减去正常扫描的运动矢量,得到抖动矢量,而后进行补偿。常用滤波方法有以下三种:
1)均值滤波。
这是最常用的一种。平均值滤波算法的公式为:
^x i =x i-(m -1)/2
+x i-
(m -3)/2
+…x i +…x i+(m -3)/2+x i-(m -1)/2
m
^y i =
y (i-(m -1)/2
+y i-(m -3)/2+…y i +…y i+(m -3)/2+y i-(m -1)/2
m
(17)
其中,m 表示参加平均值计算的轨迹点的数目,也即均值滤波法窗口的大小,通常为奇数,一般取5和7。补偿参数由下式计算:
Δx =x i -^x i ,Δy =y i -^y i
(18)
用补偿参数对原抖动图像进行补偿,则可以得到稳定的
图像。
2)Kal man 滤波
[9]
。
对于电子稳像系统,通常采用常速度相机运动模型建立系统方程,并累加帧间全局运动矢量得到绝对帧位移值,作为观测方程的观测值。假设Kal man 滤波的状态方程和测量方程分别如下:
x n =A x n -1+be n ,z n =c T
x n +u n
(19)
其中x n 是k ×1的状态矢量,A 是状态转移矩阵,大小为
k ×k,e n 和u n 分别是过程噪声和测量噪声,并且假定都是均
值为0,方差分别是σ2e 和σ2
u 的高斯分布。
矢量b 和c 的大小为k ×1,z n 代表视频图像序列第n 帧估计到的运动参数,假设s n
和u n 分别代表视频图像序列中“需要”和“不需要”的运动分量,那么有:
z n =s n +u n (20)
即有意识的运动s n =c T x n ,u n 代表随机抖动。
3)B 样条运动滤波
[11]
。
B 样条是一种用控制点来定义曲线的方法,设有n +1个
控制点P i (i =0,1,…,n ),每相邻的3个控制点可以构造出一段二次B 样条曲线。以全局运动水平方向分量为例,视频图像序列相对于基准帧的水平位移曲线为L o ,由控制点构造出二次B 样条曲线L 1,L 1表示的就是主观运动产生的相对于基准帧的位移中的水平分量S x,i ,两条曲线中对应点相减,则可得到水平抖动矢量。
根据得到的抖动矢量对当前帧图像进行补偿,就可以得到稳定的图像。但是,由于补偿,可能使得当前帧图像在补偿后出现无定义的空白区域。解决这个问题方法一是可以采用拼接的方法使用相邻帧同一区域来补偿当前帧的无定义区域,方法二是使用裁减的方法即在开始处理视频图像序列之前,就对整个图像四边都预留15%的区域作为补偿区域,即只对图像70%的区域进行处理,补偿后的图像就不会出现无定义区域,但是因为预留了15%,图像则损失了这些信息。这两种方法都各有自己的应用场合。裁减方法计算量小,适用于实时处理,拼接的方法需要大量的计算量,但是补偿效果较好,适用于抖动视频事后处理。
2.4 一种实用的稳像算法
基于上述的提到的方法,提出了一种基于投影估计和
kal m an 滤波的稳像算法,在相邻帧之间使用投影算法,求出
帧与帧之间的全局运动位移,通过累加,求出相对于第一帧即参考帧的绝对位移,然后通过kal m an 滤波,对每一帧实时处理,求出当前帧的补偿矢量,再采用裁减的方法,根据补偿矢量对每一帧进行补偿,最后得到稳定图像序列。该算法具有很快的稳定速度,每一帧的处理速度小于40m s,能够进行实时处理。实验中采用480×640的图像,用matlab 编程,在内存为512M ,cpu 为2.4G 的PC 电脑上实现,实验结果如图
3所示。
图3:a是参考帧图像;b是当前帧图像;c是参考帧图像列投影曲线;d是当前帧图像列投影曲线;e是水平方向滤波曲线,横轴为帧数,纵轴为水平方向帧绝对位移;f是垂直方向滤波曲线,横轴为帧数,纵轴为垂直方向帧绝对位移;g是补偿后带有空白区域的补偿帧(黑色部分表示空白区域);h是完全补偿后的图像。
上面提到的各种稳像方法,由于计算速度和精度的不同,各有各的适用方位。块匹配法计算精度高,但所需时间长,可应用于需要高精度但不需要实时处理的场景,而投影算法正好相反,它计算精度不是很高,但速度很快,用于实时处理。特征法对于已知处理对象特征时,估计精度高。速度快。位平面法对如何选择一个恰当的位平面也有一定的难度。选好了处理效果就好,否则就差。不滤波方法中,中值法精度低,速度快,需要相邻帧的相关信息,故不适用于实时处理。Kal m an滤波,精度依赖于所设置的过程噪声和测量噪声,但它利用当前帧及以前帧的信息,能做到实时处理。B 样条曲线法精度较高,也需要相邻帧的信息,也不能做到实时处理。估计算法和滤波方法各有优劣,需要选择性的使用,才能得到最适合的算法。
3 小结
本文介绍了数字图像稳像的整个处理流程,分析了几种典型的运动估计方法,列举了三种常用的运动运动滤波方法,提供了两种解决空白区域填充问题的方法。通过本文的介绍,可以明确稳像系统的运作流程,也可能充分了解稳像系统采用的基本算法,在此基础上,可以改进以形成多种适用的稳像算法。随着计算机和图像处理技术的发展,新的稳像方法层出不穷,还有待与进一步的研究与探索。
参考文献:
[1] 韩绍坤,赵跃进,刘明奇.电子稳像技术及其发展[J].光学技
术,2001,27(1):71-73.
[2] 赵红颖,金宏,熊经武.电子稳像技术概述[J].光学精密仪器,
2001-8,9(4):354-359.
[3] 董立羽,卜彦龙,戴斌.电子稳像技术发展评述[J].信息技术
与信息化,2004,(6):17-20.
[4] Jyh-Yeong Chang,W en-Feng Hu,Mu-Huo Cheng and Bo-
Sen Chang.D igital i m age translati onal and r otati onal moti on stabi2 lizati on using op tical fl ow technique[J].I EEE Transacti ons on Consumer Electr onics.2002,48(1):108-115.
[5] Fili ppo Vella,A lfi o Cast orina,Mancus o and Giuseppe Messina.
D igital i m age stabilizati on by adap tive bl ock moti on vect ors filtering
[J].I EEE Transacti ons on Consumer Electr onics.2002,48(3):
796-801.
[6] A lbert o Censi,Andrea Fusiell o,V it o Robert o.I m age stabilizati on
by features tracking[C].I nternati onal conference on I m age Analy2 sis and Pr ocessing1999.665-667.
[7] 朱娟娟,郭宝龙,冯宗哲.一种基于灰度投影算法的电子稳像
方法[J].光子学报,2005,34(8):1266-1269.
[8] Sung-Jea Ko,Sung-Hee Lee and Seung-Won Jeon.Fast digit2
al i m age stabilizer based on gray-coded bit-p lane matching[J].
I EEE Transacti ons on Consumer Electr onics.1999-8:598-603.
[9] S Erturk.D igital i m age stabilizati on with sub-i m age phase corre2
lati on based gl obal moti on esti m ati on[J].I EEE Transacti ons on Consumer Electr onics.2003,12:1320-1325.
[10] 孟龙,林行刚,王贵锦,徐理东,付方文.视频抖动矫正系统中
的运动滤波[J].清华大学学报(自然科学版),2005,45(1):
41-43,
56.
[作者简介]
刘玉红(1981-),男(汉族),四川遂宁人,硕士研
究生,研究方向为数字图像与视频处理;
涂 丹(1971-),男(汉族),湖南常德人,博士,副
教授,研究方向为多媒体技术、图像与视频处理。
数字图像处理实验报告完整版
数字图像处理 实验一 MATLAB数字图像处理初步 一、显示图像 1.利用imread( )函数读取一幅图像,假设其名为lily.tif,存入一个数组中; 2.利用whos 命令提取该读入图像flower.tif的基本信息; 3.利用imshow()函数来显示这幅图像; 实验结果如下图: 源代码: >>I=imread('lily.tif') >> whos I >> imshow(I) 二、压缩图像 4.利用imfinfo函数来获取图像文件的压缩,颜色等等其他的详细信息; 5.利用imwrite()函数来压缩这幅图象,将其保存为一幅压缩了像素的jpg文件,设为lily.jpg;语法:imwrite(原图像,新图像,‘quality’,q), q取0-100。 6.同样利用imwrite()函数将最初读入的tif图象另存为一幅bmp图像,设为flily.bmp。7.用imread()读入图像Sunset.jpg和Winter.jpg; 8.用imfinfo()获取图像Sunset.jpg和Winter.jpg的大小; 9.用figure,imshow()分别将Sunset.jpg和Winter.jpg显示出来,观察两幅图像的质量。 其中9的实验结果如下图:
源代码: 4~6(接上面两个) >>I=imread('lily.tif') >> imfinfo 'lily.tif'; >> imwrite(I,'lily.jpg','quality',20); >> imwrite(I,'lily.bmp'); 7~9 >>I=imread('Sunset.jpg'); >>J=imread('Winter.jpg') >>imfinfo 'Sunset.jpg' >> imfinfo 'Winter.jpg' >>figure(1),imshow('Sunset.jpg') >>figure(2),imshow('Winter.jpg') 三、二值化图像 10.用im2bw将一幅灰度图像转化为二值图像,并且用imshow显示出来观察图像的特征。实验结果如下图: 源代码: >> I=imread('lily.tif') >>gg=im2bw(I,0.4); F>>igure, imshow(gg)
数字图像处理与分析实验作业(DOC)
数字图像处理与分析实验作业 作业说明:作业题目分为基本题和综合应用题。基本题主要是考察大家对教材涉及的一些基本图像处理技术的理解和实现。而综合应用题主要是考察大家综合利用图像处理的若干技术来解决实际问题的能力。 注:所有实验用图像均可从网上下载,文档中的图片只是示例。 作业要求: 编程工具:Matlab或者VC(可以使用OpenCV:https://www.wendangku.net/doc/8412635067.html,/)。因为很多基本的图象处理算法已经集成在很多的编程工具中,而编程训练中基本题的目的是让同学们加深对这些算法的理解,所以基本题要求同学们只能使用图像读取和显示相关的函数(例如Matlab的imread imshow,imwrite,OpenCV的cvCreateImage,cvLoadImage,cvShowImage),而不要直接调用相关的API(例如二维DFT,图象均衡等等),但在综合应用题中则无此限制。 上交的作业包括:实验报告和程序。其中实验报告要求写出算法分析(必要时请附上流程图),函数说明(给出主要函数的接口和参数说明),实验结果(附图)及讨论分析。提交的程序,一定要确保可以运行,最好能写个程序说明。 基本题一共有10道,可以从中任选2道题来完成。综合应用题有2道,可以从中任选1道来完成。 请各位同学务必独立完成,切忌抄袭! 基本题 一、直方图变换 要求对原始Lena 图像实现以下三种取整函数的直方图均衡化: 线性函数: t k= int[(L -1) t k+ 0.5]; 对数函数: t k= int[( L-1)log(1+9t k) + 0.5] ; 指数函数: t k= int[(L -1)exp( t k-1) + 0.5] ; 要求给出: 1、原始图像和分别采用上述三种方式均衡化后的图像; 2、原始图像的直方图和上述三种方式对应均衡化后的直方图。
数字图像处理练习题
一、基本题目 1. 2.HSI模型中,H I (Intensity) 3.CMYK (Black)。 4. 5. 6. 7. 8.存储一幅大小为M×N,灰度级为2g级的图像需要bit)大小的存 储空间。 9.图像退化是图像形成、传输和记录的过程中,由于成像系统、传输介质和设 10. 行图像的边缘检测。 11.用函数b s+ =来对图像象素进行拉伸变换,其中r表示待变换图像象素灰 kr 度值,若系数0 k >b ,1> 压缩)。 12. 13. 两种。 14. 15.少),所得 16. 17.图像退化的典型表现为图像模糊、失真、噪声等,我们针对退化进行图像复
18.灰度直方图反映一幅图像中各灰度级象素出现的频率之间的关系, 19.因此可以采 20.图像边缘是指图像中象素灰度值有阶跃变化或屋顶状变化的那些象素的集 合。 21. 22. 23.(Y)和色度(U,V)信号,它们之间的关系 为: 24.我国的电视标准是PAL制,它规定每秒 行 25. 26.MPEG是ISO其工作是开发满足各种应用 27.若原始的模拟图像,其傅氏频谱在水平方向的截止频率为 m U,在垂直方向 ,则只要水平方向的空间取样频率 02 m U U =,垂直方向的空 28.CT。 29.人们在观察一条由均匀黑和均匀白的区域形成的边界时,可能会认为人的主 观感受是与任一点的强度有关。但实际情况并不是这样,人感觉到的是在亮度变化部位附近的暗区和亮区中分别存在一条更黑和更亮的条带,这就是所谓的“Mach带” 30.若代码中任何一个码字都不是另一个码字的续长,也就是不能在某一个码字 后面添加一些码元而构成另一个码字,称其为非续长代码。反之,称其为续长代码。 31.对每个取样点灰度值的离散化过程称为量化。常见的量化可分为两大类,一 类是将每个样值独立进行量化的标量量化方法,另一类是将若干样值联合起来作为一个矢量来量化的矢量量化方法。在标量量化中按照量化等级的划分方法不同又分为两种,一种均匀量化;另一种是非均匀量化 32.数学形态学构成了一种新型的数字图像分析方法和理论。它的基本思想是用
数字图像处理实验报告
实验一灰度图像直方图统计 一、实验目的 掌握灰度图像直方图的概念和计算方法,了解直方图的作用和用途。提高学生编程能力,巩固所学知识。 二、实验内容和要求 (1)用Photoshop显示、了解图像平均明暗度和对比度等信息; (2)用MatLab读取和显示一幅灰度图像; (3)用MatLab编写直方图统计的程序。 三、实验步骤 1. 使用Photoshop显示直方图: 1)点击文件→打开,打开一幅图像; 2)对图像做增强处理,例如选择图像→调整→自动对比度对图像进行灰度拉伸,观察图像进行对比度增强前后的视觉变化。 3)利用统计灰度图像直方图的程序分别针对灰度拉伸前后的灰度图像绘制其灰度直方图,观察其前后的直方图变化。 2.用MatLab读取和显示一幅灰度图像; 3. 绘制图像的灰度直方图; function Display_Histogram()
Input=imread('timg.jpg'); figure(100); imshow(uint8(Input)); title('原始图像'); Input_Image=rgb2gray(Input); figure(200); imshow(uint8(Input_Image)); title('灰度图像'); sum=0; His_Image=zeros(1,256); [m,n]=size(Input_Image); for k=0:255 for I=1:m for j=1:n if Input_Image(I,j)==k His_Image(k+1)=His_Image(k+1)+1; end end end end figure(300); plot(His_Image); title('图像的灰度直方图'); 4.显示图像的灰度直方图。
数字图像处理算法汇总
形态学运算:基本思想是具用一定结构形状的结构元素去度量和提取图像中的对应形状以达到对图像分析和识别的目的。 腐蚀运算:将结构元素中心遍历整个图像,当图像完全包含结构元素时的中心点的轨迹即为腐蚀后的图像,图像变细。腐蚀运算可用于滤波,选择适当大小和形状的结构元素,可以滤除掉所有不能完全包含结构元素的噪声点。当然利用腐蚀滤除噪声有一个缺点,即在去除噪声的同时,对图像中前景物体形状也会有影响,但当我们只关心物体的位置或者个数时,则影响不大。 膨胀运算:将结构元素中心遍历整个图像边缘,中心点的轨迹即为腐蚀后的图像,图像整体变粗。通常用于将图像原本断裂开来的同一物体桥接起来,对图像进行二值化之后,很容易是一个连通的物体断裂为两个部分,而这会给后续的图像分析造成干扰,此时就可借助膨胀桥接断裂的缝隙。 开运算:先腐蚀后膨胀,可以使图像的轮廓变得光滑,还能使狭窄的连接断开和消除细毛刺;但与腐蚀运算不同的是,图像大的轮廓并没有发生整体的收缩,物体位置也没有发生任何变化。可以去除比结构元素更小的明亮细节,同时保持所有灰度级和较大亮区特性相对不变,可用于补偿不均匀的背景亮度。与腐蚀运算相比,开运算在过滤噪声的同时,并没有对物体的形状轮廓造成明显的影响,但是如果我们只关心物体的位置或者个数时,物体形状的改变不会给我们带来困扰,此时腐蚀滤波具有处理速度上的优势。 闭运算:先膨胀后腐蚀,可以去除比结构元素更小的暗色细节。开闭运算经常组合起来平滑图像并去除噪声。可使轮廓变的平滑,它通常能弥合狭窄的间断,填补小的孔洞。腐蚀运算刚好和开运算相反,膨胀运算刚好和闭运算相反,开闭运算也是对偶的,然而与腐蚀、膨胀不同的是,对于某图像多次应用开或闭运算的效果相同。 击中击不中运算:先由结构元素腐蚀原图像,再将结构元素取反去腐蚀原图像的取反图,最后将两幅处理后的图像取交。主要用于图像中某些特定形状的精确定位。 顶帽变换:原图像减去开运算以后的图像。当图像的背景颜色不均匀时,使用阈值二值化会造成目标轮廓的边缘缺失,此时可用开运算(结构元素小于目标轮廓)对整个图像背景进行合理估计,再用原图像减去开运算以后的图像就会是整个图像的灰度均匀,二值化后的图像不会有缺失。 Sobel算子: Prewitt算子: LOG算子: Canny算子:力图在抗噪声干扰和精确定位之间尊求折中方案,主要步骤如下所示: 1、用高斯滤波器平滑图像; 2、用一阶偏导的有限差分来计算梯度的幅值和方向; 3、对梯度幅值进行非极大值抑制; 4、用双阈值算法检测和连接边缘。 Hough变换: 边缘检测:
数字图像处理实验报告
数字图像处理实验报告 实验一数字图像基本操作及灰度调整 一、实验目的 1)掌握读、写图像的基本方法。 2)掌握MATLAB语言中图像数据与信息的读取方法。 3)理解图像灰度变换处理在图像增强的作用。 4)掌握绘制灰度直方图的方法,理解灰度直方图的灰度变换及均衡化的方 法。 二、实验内容与要求 1.熟悉MATLAB语言中对图像数据读取,显示等基本函数 特别需要熟悉下列命令:熟悉imread()函数、imwrite()函数、size()函数、Subplot()函数、Figure()函数。 1)将MATLAB目录下work文件夹中的forest.tif图像文件读出.用到imread, imfinfo 等文件,观察一下图像数据,了解一下数字图像在MATLAB中的处理就是处理一个矩阵。将这个图像显示出来(用imshow)。尝试修改map颜色矩阵的值,再将图像显示出来,观察图像颜色的变化。 2)将MATLAB目录下work文件夹中的b747.jpg图像文件读出,用rgb2gray() 将其 转化为灰度图像,记为变量B。 2.图像灰度变换处理在图像增强的作用 读入不同情况的图像,请自己编程和调用Matlab函数用常用灰度变换函数对输入图像进行灰度变换,比较相应的处理效果。 3.绘制图像灰度直方图的方法,对图像进行均衡化处理 请自己编程和调用Matlab函数完成如下实验。 1)显示B的图像及灰度直方图,可以发现其灰度值集中在一段区域,用 imadjust函 数将它的灰度值调整到[0,1]之间,并观察调整后的图像与原图像的差别,调整后的灰
度直方图与原灰度直方图的区别。 2) 对B 进行直方图均衡化处理,试比较与源图的异同。 3) 对B 进行如图所示的分段线形变换处理,试比较与直方图均衡化处理的异同。 图1.1 分段线性变换函数 三、实验原理与算法分析 1. 灰度变换 灰度变换是图像增强的一种重要手段,它常用于改变图象的灰度范围及分布,是图象数字化及图象显示的重要工具。 1) 图像反转 灰度级范围为[0, L-1]的图像反转可由下式获得 r L s --=1 2) 对数运算:有时原图的动态范围太大,超出某些显示设备的允许动态范围, 如直接使用原图,则一部分细节可能丢失。解决的方法是对原图进行灰度压缩,如对数变换: s = c log(1 + r ),c 为常数,r ≥ 0 3) 幂次变换: 0,0,≥≥=γγc cr s 4) 对比拉伸:在实际应用中,为了突出图像中感兴趣的研究对象,常常要求 局部扩展拉伸某一范围的灰度值,或对不同范围的灰度值进行不同的拉伸处理,即分段线性拉伸: 其对应的数学表达式为:
数字图像处理:部分课后习题参考问题详解
第一章 1.连续图像中,图像为一个二维平面,(x,y)图像中的任意一点,f(x,y)为图像于(x,y)于处的值。 连续图像中,(x,y)的取值是连续的,f(x,y)也是连续的 数字图像中,图像为一个由有限行有限列组成的二维平面,(i,j)为平面中的任意一点,g(i,j)则为图像在(i,j)处的灰度值,数字图像中,(i,j) 的取值是不连续的,只能取整数,对应第i行j 列,g(i,j) 也是不连续的,表示图像i行j列处图像灰度值。 联系:数字图像g(i,j)是对连续图像f(x,y)经过采样和量化这两个步骤得到的。其中 g(i,j)=f(x,y)|x=i,y=j 2. 图像工程的容可分为图像处理、图像分析和图像理解三个层次,这三个层次既有联系又有区 别,如下图所示。 图像处理的重点是图像之间进行的变换。尽管人们常用图像处理泛指各种图像技术,但比较狭义的图像处理主要是对图像进行各种加工,以改善图像的视觉效果并为自动识别奠定基础,或对图像进行压缩编码以减少所需存储空间 图像分析主要是对图像中感兴趣的目标进行检测和测量,以获得它们的客观信息,从而建立对图像的描述。如果说图像处理是一个从图像到图像的过程,则图像分析是一个从图像到数据的过程。这里的数据可以是目标特征的测量结果,或是基于测量的符号表示,它们描述了目标的特点和性质。 图像理解的重点是在图像分析的基础上,进一步研究图像中各目标的性质和它们之间的相互联系,并得出对图像容含义的理解以及对原来客观场景的解释,从而指导和规划行动。 如果说图像分析主要以观察者为中心来研究客观世界,那么图像理解在一定程度上是以客观世界为中心,借助知识、经验等来把握整个客观世界(包括没有直接观察到的事物)的。
基于matlab的数字图像增强算法研究与实现
基于matlab的数字图像增强算法研究与实现 摘要图像在获取和传输过程中,会受到各种噪声的干扰,使图像退化质量下降,对分析图像不利。图像的平滑或去噪一直是数字图像处理技术中的一项重要工作。为此,论述了在空间域中的各种数字图像平滑技术方法。 关键字:数字图像;图像增强;平滑处理
目录 第一章、概述 2 1.1 图像平滑意义 2 1.2图像平滑应用 2 1.3噪声模 型 (3) 第二章 、图像平滑方法 5 2.1 空域低通滤波 5 2.1.1 均值滤波器 6 2.1.2 中值滤波器 6 2.2 频域低通滤波 7 第三章、图像平滑处理与调试 9 3.1 模拟噪声图像 9 3.2均值滤波法 11 3.3 中值滤波法 14 3.4 频域低通滤波法 17 第四章、总结与体会 19 参考文献 20 第一章、概述 1.1图像平滑意义 图像平滑(S m o o t h i n g)的主要目的是减少图像噪声。图像噪声来自于多方面,有来自于系统外部的干扰(如电磁波或经
电源窜进系统内部的外部噪声),也有来自于系统内部的干扰(如摄像机的热噪声,电器机械运动而产生的抖动噪声内部噪声)。实际获得的图像都因受到干扰而有噪声,噪声产生的原因决定了噪声分布的特性及与图像信号的关系。减少噪声的方法可以在空间域或在频率域处理。在空间域中进行时,基本方法就是求像素的平均值或中值;在频域中则运用低通滤波技术。 图像中的噪声往往是和信号交织在一起的,尤其是乘性噪声,如果平滑不当,就会使图像本身的细节如边缘轮廓,线条等模糊不清,从而使图像降质。图像平滑总是要以一定的细节模糊为代价的,因此如何尽量平滑掉图像的噪声,又尽量保持图像的细节,是图像平滑研究的主要问题之一。 1.2图像平滑应用 图像平滑主要是为了消除被污染图像中的噪声,这是遥感图像处理研究的最基本内容之一,被广泛应用于图像显示、传 输、分析、动画制作、媒体合成等多个方面。该技术是出于人类视觉系统的生理接受特点而设计的一种改善图像质量的方法。处理对象是在图像生成、传输、处理、显示等过程中受到多种因素扰动形成的加噪图像。在图像处理体系中,图像平滑是图像复原技术针对“一幅图像中唯一存在的退化是噪声”时的特例。 1.3噪声模型 1.3.1噪声来源 一幅图像可能会受到各种噪声的干扰,而数字图像的实质就是光电信息,因此图像噪声主要可能来源于以下几个方面:光电传感器噪声、大气层电磁暴、闪电等引起的强脉冲干扰、
数字图像处理报告
数字图像处理的起源与应用 1.概述 数字图像处理(Digital Image Processing)是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。数字图像处理技术目前广泛应用于各个领域,其发挥的作用有效提高了人们的生产生活质量。 2.起源与发展 (1)20世纪 20 年代,数字图像处理最早应用于报纸行业。由于报纸行业信息传输的需要,一根海底电缆从英国伦敦连输到美国纽约,实现了第一幅数组照片的传送。(在当时那个年代如果不采用数字图像处理,一张图像传达的时间需要7 天,而借助数字图像处理技术仅耗费 3 小时)。 (2)20世纪50年代,当时的图像处理是以人为对象,以改善人的视觉效果为目的。 (3)20世纪60年代的美国喷气推进实验室是图像处理技术首次获得实际成功的应用,推动了数字图像处理这门学科的诞生。 (4)20世纪70年代英国EMI公司工程师Housfield发明了CT并获得了诺贝尔奖,这对人类的发展作出了划时代的贡献。借助计算机、人工智能等方面的快速发展,数字图像处理技术实现了更高层次的发展。相关工作人员已经着手研究如何使用计算机进行图像解释。 (5)20世纪 80 年代。研究人员将数字图像处理应用于地理信息系统。从这个阶段开始数字图像处理技术的应用领域不断扩大,在工业检测、遥感等方面也得到了广泛应用,在遥感方面实现了对卫星传送回来的图像的处理。 (6)20世纪 90 年代。数字图像处理技术就得到了一个快速发展,其中特别是小波理论和变换方法的诞生(Mallat在1988年有效地将小波分析应用于图像分解和重构),更好地实现了数字图像的分解与重构。 (7)进入到 21 世纪,借助计算机技术的飞速发展与各类理论的不断完善,数字图像处理技术的应用范围被拓宽,甚至已经在某些领域取得突破。从目前数字图像处理技术的特点进行分析,可以发现图像信息量巨大,在图像处理综合性方面显示出十分明显的优势,其中就借助了图像信息理论与通信理论的紧密联系。再加上数字图像处理技术具有处理精度高、灵活性强、再现性好、适用面广、信息压缩的潜力大等特点,因此已经成功地应用在各个领域。 3.应用 (1)航天和航空技术方面:早在1964年美国就利用图像处理技术对月球照片进行处理,并且成功地绘制出月球表面地图,这个重大的突破使得图像处理技术在航天技术中发挥着越来越重要的作用。“卡西尼”号飞船进入土星轨道后传回地球的土星环照片,“火星快车”拍摄到的火星山体滑坡照片,还有我国嫦娥探测器拍摄的月球表面照片,以及近来很火的“大疆”无人机航拍等等。这些照片都体现了数字图像处理技术在航空航天技术领域不可或缺的重要作用。 (2)遥感领域方面的应用:数字图像处理在遥感的应用,主要是获取地形地质及地面设施资料,矿藏探查、森林资源状况、海洋和农业等资源的调查、自然灾害预测预报、环境污染检测、气象卫星云图处理以及地面军事目标的识别。例
东南大学数字图像处理实验报告
数字图像处理 实验报告 学号:04211734 姓名:付永钦 日期:2014/6/7 1.图像直方图统计 ①原理:灰度直方图是将数字图像的所有像素,按照灰度值的大小,统计其所出现的频度。 通常,灰度直方图的横坐标表示灰度值,纵坐标为半个像素个数,也可以采用某一灰度值的像素数占全图像素数的百分比作为纵坐标。 ②算法: clear all PS=imread('girl-grey1.jpg'); %读入JPG彩色图像文件figure(1);subplot(1,2,1);imshow(PS);title('原图像灰度图'); [m,n]=size(PS); %测量图像尺寸参数 GP=zeros(1,256); %预创建存放灰度出现概率的向量 for k=0:255 GP(k+1)=length(find(PS==k))/(m*n); %计算每级灰度出现的概率end figure(1);subplot(1,2,2);bar(0:255,GP,'g') %绘制直方图 axis([0 255 min(GP) max(GP)]); title('原图像直方图') xlabel('灰度值') ylabel('出现概率') ③处理结果:
原图像灰度图 100 200 0.005 0.010.0150.020.025 0.030.035 0.04原图像直方图 灰度值 出现概率 ④结果分析:由图可以看出,原图像的灰度直方图比较集中。 2. 图像的线性变换 ①原理:直方图均衡方法的基本原理是:对在图像中像素个数多的灰度值(即对画面起主 要作用的灰度值)进行展宽,而对像素个数少的灰度值(即对画面不起主要作用的灰度值)进行归并。从而达到清晰图像的目的。 ②算法: clear all %一,图像的预处理,读入彩色图像将其灰度化 PS=imread('girl-grey1.jpg'); figure(1);subplot(2,2,1);imshow(PS);title('原图像灰度图'); %二,绘制直方图 [m,n]=size(PS); %测量图像尺寸参数 GP=zeros(1,256); %预创建存放灰度出现概率的向量 for k=0:255
数字图像处理整理经典
名词解释 数字图像:是将一幅画面在空间上分割成离散的点(或像元),各点(或像元)的灰度值经量化用离散的整数来表示,形成计算机能处理的形式。 1.数字图像:一幅图像f(x,y),当x,y和幅值f为有限的离散数值时,称该图像为数字图像。 图像:是自然生物或人造物理的观测系统对世界的记录,是以物理能量为载体,以物质为记录介质的信息的一种形式。 数字图像处理:采用特定的算法对数字图像进行处理,以获取视觉、接口输入的软硬件所需要数字图像的过程。 图像增强:通过某种技术有选择地突出对某一具体应用有用的信息,削弱或抑制一些无用的信息。 无损压缩:可精确无误的从压缩数据中恢复出原始数据。 灰度直方图:灰度直方图是灰度级的函数,描述的是图像中具有该灰度级的像素的个数。或:灰度直方图是指反映一幅图像各灰度级像元出现的频率。 细化:提取线宽为一个像元大小的中心线的操作。 8、8-连通的定义:对于具有值V的像素p和q ,如果q在集合N8(p)中,则称这两个像素是8-连通的。 9、中值滤波:中值滤波是指将当前像元的窗口(或领域)中所有像元灰度由小到大进行排序,中间值作为当前像元的输出值。 10、像素的邻域: 邻域是指一个像元(x,y)的邻近(周围)形成的像元集合。即{(x=p,y=q)}p、q为任意整数。像素的四邻域:像素p(x,y)的4-邻域是:(x+1,y),(x-1,y) ,(x,y+1), (x,y-1) 11、灰度直方图:以灰度值为自变量,灰度值概率函数得到的曲线就是灰度直方图。 12.无失真编码:无失真编码是指压缩图象经解压可以恢复原图象,没有任何信息损失的编码技术。 13.直方图均衡化:直方图均衡化就是通过变换函数将原图像的直方图修正为平坦的直方图,以此来修正原图像之灰度值。 14.采样:对图像f(x,y)的空间位置坐标(x,y)的离散化以获取离散点的函数值的过程称为图像的采样。 15.量化:把采样点上对应的亮度连续变化区间转换为单个特定数码的过程,称之为量化,即采样点亮度的离散化。 16.灰度图像:指每个像素的信息由一个量化的灰度级来描述的图像,它只有亮度信息,没有颜色信息。 17.色度:通常把色调和饱和度通称为色度,它表示颜色的类别与深浅程度。 18.图像锐化:是增强图象的边缘或轮廓。 19.直方图规定化(匹配):用于产生处理后有特殊直方图的图像的方法 20. 数据压缩:指减少表示给定信息量所需的数据量。 像素的邻域:邻域是指一个像元(x,y)的邻近(周围)形成的像元集合。即{(x=p,y=q)}p、q为任意整数。 像素的四邻域:像素p(x,y)的4-邻域是:(x+1,y),(x-1,y) ,(x,y+1),(x,y-1) 灰度直方图:灰度直方图是指反映一幅图像各灰度级像元出现的频率。?、中值滤波:中值滤波是指将当前像元的窗口(或领域)中所有像元灰度由小到大进行排序,中间值作为当前像元的输出值。 像素数字图像是由有限的元素组成的,每个元素都有一个特定的位置和幅值,这些元素称为图像元素、画面元素或像素。 4.空间分辨率:是图像中可辨别的最小细节。
数字图像处理-图像去噪方法
图像去噪方法 一、引言 图像信号在产生、传输和记录的过程中,经常会受到各种噪声的干扰,噪声可以理解为妨碍人的视觉器官或系统传感器对所接收图像源信 息进行理解或分析的各种元素。噪声对图像的输入、采集、处理的各个环节以及最终输出结果都会产生一定影响。图像去噪是数字图像处理中的重要环节和步骤。去噪效果的好坏直接影响到后续的图像处理工作如图像分割、边缘检测等。一般数字图像系统中的常见噪声主要有:高斯噪声(主要由阻性元器件内部产生)、椒盐噪声(主要是图像切割引起的黑图像上的白点噪声或光电转换过程中产生的泊松噪声)等。我们平常使用的滤波方法一般有均值滤波、中值滤波和小波滤波,他们分别对某种噪声的滤除有较好的效果。对图像进行去噪已成为图像处理中极其重要的内容。 二、常见的噪声 1、高斯噪声:主要有阻性元器件内部产生。 2、椒盐噪声:主要是图像切割引起的黑图像上的白点噪声或光电转换过程中产生泊松噪声。 3、量化噪声:此类噪声与输入图像信号无关,是量化过程存在量化误差,再反映到接收端而产生,其大小显示出数字图像和原始图像差异。 一般数字图像系统中的常见噪声主要有高斯噪声和椒盐噪声等,减少噪声的方法可以在图像空间域或在图像频率域完成。在空间域对图像处理主要有均值滤波算法和中值滤波算法.图像频率域去噪方法
是对图像进行某种变换,将图像从空间域转换到频率域,对频率域中的变换系数进行处理,再进行反变换将图像从频率域转换到空间域来达到去除图像噪声的目的。将图像从空间转换到变换域的变换方法很多,常用的有傅立叶变换、小波变换等。 三、去噪常用的方法 1、均值滤波 均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。其基本原理是用均值替代原图像中的各个像素值,即对待处理的当前像素点(x,y),选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(x,y),作为处理后图像在 f?sf(x,y),其中,s为模板,M为该点上的灰度g(x,y),即g x,y=1 M 该模板中包含当前像素在内的像素总个数。这种算法简单,处理速度快,但它的主要缺点是在降低噪声的同时使图像产生模糊,特别是在边缘和细节处。而且邻域越大,在去噪能力增强的同时模糊程度越严重。
数字图像处理报告
《数字图像处理》 实验报告 院系:XXXXX 学号:XXXXXXX 姓名:XXX 指导老师:XX XX 完成时间:2020.02.02
题目一: (1)将宽为2n的正方形图像,用FFT算法从空域变换到频域,并用频域图像的模来进行显示; (2)使图像能量中心,对应到几何中心,并用频域图像的模来进行显示; (3)将频域图象,通过FFT逆变换到空域,并显示。 该题实现环境为操作系统:Windows 10 操作系统;编程环境:VS2013;内部核心处理算法库:OpenCV。 此题目的具体实现过程及其展示如下所示:
} imshow("原始图像", srcImage); //将输入图像延扩到最佳的尺寸,边界用0补充 int m = getOptimalDFTSize(srcImage.rows); int n = getOptimalDFTSize(srcImage.cols); //将添加的像素初始化为0. Mat padded; copyMakeBorder(srcImage, padded,0, m - srcImage.rows,0, n -srcImage.cols, BORDER_CONSTANT, Scalar::all(0)); //为傅立叶变换的结果(实部和虚部)分配存储空间。 //将planes数组组合合并成一个多通道的数组complexI Mat planes[]={ Mat_
数字图像处理的基本方法
一、图像的预处理技术 图像处理按输入结果可以分为两类,即输入输出都是一副图像和输入一张图像输出不再是图像的数据。图像处理是个很广泛的概念,有时候我们仅仅需要对一幅图像做一些简单的处理,即按照我们的需求将它加工称我们想要得效果的图像,比如图像的降噪和增强、灰度变换等等。更多时候我们想要从一幅图像中获取更高级的结果,比如图像中的目标检测与识别。如果我们将输出图像中更高级的结果视为目的的话,那么我们可以把输入输出都是一幅图像看作是整个处理流程中的预处理。下面我们将谈到一些重要的预处理技术。 (一)图像增强与去噪 图像的增强是一个主观的结果,原来的图像按照我们的需求被处理成我们想要的效果,比如说模糊、锐化、灰度变换等等。图像的去噪则是尽可能让图像恢复到被噪声污染前的样子。衡量标准是可以度量的。不管是图像的增强与去噪,都是基于滤波操作的。 1.滤波器的设计方法 滤波操作是图像处理的一个基本操作,滤波又可分为空间滤波和频域滤波。空间滤波是用一个空间模板在图像每个像素点处进行卷积,卷积的结果就是滤波后的图像。频域滤波则是在频率域看待一幅图像,使用快速傅里叶变换将图像变换到频域,得到图像的频谱。我们可以在频域用函数来保留或减弱/去除相应频率分量,再变换回空间域,得到频域滤波的结果。而空间滤波和频域滤波有着一定的联系。频域滤波也可以指导空间模板的设计,卷积定理是二者连接的桥梁。 (1)频域滤波 使用二维离散傅里叶变换(DFT )变换到频域: ∑∑-=+--==10)//(210),(),(N y N vy M ux i M x e y x f v u F π 使用二维离散傅里叶反变换(IDFT )变换到空间域: ∑∑-=-=+=1010)//(2),(1),(M u N v N vy M ux i e v u F MN y x f π 在实际应用中,由于该过程时间复杂度过高,会使用快速傅里叶变换(FFT )来加速这个过程。现在我们可以在频域的角度看待这些图像了。必须了解的是,图像中的细节即灰度变化剧烈的地方对应着高频分量,图像中平坦变化较少的地方对应着低频分量。图像中的周期性图案/噪声对应着某一个频率区域,那么在频域使用合适的滤波器就能去除相应的频率分量,再使用傅里叶反变换就能看到实际想要的结果。 不同的是,在频域的滤波器不再是做卷积,而是做乘积,因为做乘法的目的在于控制频率分量。比较有代表性的有如下几个滤波器: 高斯低通滤波器 222/),(),(σv u D e v u H -= D 是距离频率矩形中心的距离。该滤波器能保留低频分量,逐渐减小高频分量,对原图像具有模糊作用。
数字图像处理试卷及答案
1. 图像与灰度直方图间的对应关系是多对一; 2. 下列算法中a.梯度锐化b.二值化c.傅立叶变换d.中值滤波,属于点处理的是b二值化; 3. 在彩色图像处理中,常使用HSI模型,它适于做图像处理的原因有:1、在HIS模型中亮度分量与色度分量是分开的;2、色调与饱和度的概念与人的感知联系紧密。; 4. 若将一幅灰度图像中的对应直方图中偶数项的像素灰度均用相应的对应直方图中奇数项的像素灰度代替(设灰度级为256),所得到的图像将亮度增加,对比度减少; 5. MATLAB函数fspecial(type,parameters)常用类型有:average 、gaussian、laplacian、prewitt、sobel、unsharp; 6. 检测边缘的Sobel算子对应的模板形式为: -1 -2 -1 0 0 0 1 2 1 -1 0 1 -2 0 2 -1 0 1 7. 写出4-链码10103322的形状数:03033133; 8. 源数据编码与解码的模型中量化器(Quantizer)的作用是减少心里视觉冗余; 9. MPEG4标准主要编码技术有DCT变换、小波变换等; 10. 图像复原和图像增强的主要区别是图像增强主要是一个主观过程,而图像复原主要是一个客观过程; 第10题:图像增强不考虑图像是如何退化的,而图像复原需知道图像退化的机制和过程等先验知识
1、数字图像 数字图像是指由被称作像素的小块区域组成的二维矩阵。将物理图像行列划分后,每个小块区域称为像素(pixel)。 数字图像处理 指用数字计算机及其它有关数字技术,对图像施加某种运算和处理,从而达到某种预想目的的技术. 2、8-连通的定义 -对于具有值V的像素p和q ,如果q在集合N8(p)中,则称这两个像素是8-连通的。 3、灰度直方图 灰度直方图是指反映一幅图像各灰度级像元出现的频率。 4、中值滤波 中值滤波是指将当前像元的窗口(或领域)中所有像元灰度由小到大进行排序,中间值作为当前像元的输出值。 像素的邻域 邻域是指一个像元(x,y)的邻近(周围)形成的像元集合。即{(x=p,y=q)}p、q为任意整数。 像素的四邻域 像素p(x,y)的4-邻域是:(x+1,y),(x-1,y) ,(x,y+1), (x,y-1) 三、简答题( 每小题10分,本题共30 分): 1. 举例说明直方图均衡化的基本步骤。 直方图均衡化是通过灰度变换将一幅图象转换为另一幅具有均衡直方图,即在每个灰度级上都具有相同的象素点数的过程。
数字图像处理试题及答案
一、填空题(每题1分,共15分) 1、列举数字图像处理的三个应用领域 医学 、天文学 、 军事 2、存储一幅大小为10241024?,256个灰度级的图像,需要 8M bit 。 3、亮度鉴别实验表明,韦伯比越大,则亮度鉴别能力越 差 。 4、直方图均衡化适用于增强直方图呈 尖峰 分布的图像。 5、依据图像的保真度,图像压缩可分为 无损压缩 和 有损压缩 6、图像压缩是建立在图像存在 编码冗余 、 像素间冗余 、 心理视觉冗余 三种冗余基础上。 7、对于彩色图像,通常用以区别颜色的特性是 色调 、 饱和度 亮度 。 8、对于拉普拉斯算子运算过程中图像出现负值的情况,写出一种标定方法: m i n m a x m i ((,))*255/()g x y g g g -- 二、选择题(每题2分,共20分) 1、采用幂次变换进行灰度变换时,当幂次取大于1时,该变换是针对如下哪一类图像进行增强。 ( B ) A 图像整体偏暗 B 图像整体偏亮 C 图像细节淹没在暗背景中 D 图像同时存在过亮和过暗背景 2、图像灰度方差说明了图像哪一个属性。( B ) A 平均灰度 B 图像对比度 C 图像整体亮度 D 图像细节 3、计算机显示器主要采用哪一种彩色模型( A ) A 、RG B B 、CMY 或CMYK C 、HSI D 、HSV 4、采用模板[-1 1]T 主要检测( A )方向的边缘。 A.水平 B.45? C.垂直 D.135? 5、下列算法中属于图象锐化处理的是:( C ) A.低通滤波 B.加权平均法 C.高通滤波 D. 中值滤波 6、维纳滤波器通常用于( C ) A 、去噪 B 、减小图像动态范围 C 、复原图像 D 、平滑图像 7、彩色图像增强时, C 处理可以采用RGB 彩色模型。 A. 直方图均衡化 B. 同态滤波 C. 加权均值滤波 D. 中值滤波 8、__B__滤波器在对图像复原过程中需要计算噪声功率谱和图像功率谱。 A. 逆滤波 B. 维纳滤波 C. 约束最小二乘滤波 D. 同态滤波 9、高通滤波后的图像通常较暗,为改善这种情况,将高通滤波器的转移函数加上一常数量以便引入 一些低频分量。这样的滤波器叫 B 。 A. 巴特沃斯高通滤波器 B. 高频提升滤波器 C. 高频加强滤波器 D. 理想高通滤波器 10、图象与灰度直方图间的对应关系是 B __ A.一一对应 B.多对一 C.一对多 D.都不 三、判断题(每题1分,共10分)
数字图像处理实验报告材料94986
院系:计算机科学学院专业:计算机科学与技术年级: 2012级 课程名称:数字图像处理组号: (学号): 指导教师:高志荣 2015年 5月 25日
实验原理(算法流程)2.运行结果 1-1-1图查看2012213500.png图片的基本信息和显示图片过程 1-1-2图将2012213500.png图片保存为2012213500.bmp图片3.实验分析
实验原理(算法流程) 先用imread()函数将2012213500.png存入I数组中,可见1-1-1图右上角的Workspace中的I。然后用imfinfo()函数和ans函数读取该图像的大小、类型等信息,具体在1-1-1图的Command Window中可见。至于图片格式的转换,就是用rgb2gray()函数将保存在I数组中的数据转换成灰度格式保存在原来的数组I中。最后将变换所得到的数据保存于2012213500.bmp文件中。 实验(2): 1.代码实现 I=imread(2012213500.bmp');%读取灰度图片 subplot(221),imshow(I,[]),title('256*256,256') I=I(1:2:end,1:2:end);%图片采样 subplot(222),imshow(I,[]),title('128*128,256') I=I(1:2:end,1:2:end);%图片采样 subplot(223),imshow(I,[]),title('64*64,256') I=I(1:2:end,1:2:end);%图片采样 subplot(224),imshow(I,[]),title('32*32,256') 2.运行结果 1-2 图图片空间分辨率对图片的影响 3.实验分析 由1-2图可以看出,在保持灰度级数一定的条件下,随着图片空间分辨率的减半,即256*256,128*128,64*64,32*32的图像,图中的各个区域边缘处的棋盘模式越来越明显,并且全图的像素颗粒越来越粗。证明了空间分辨率是影响图片清晰度的因素之一。 实验(3): 1.代码实现 I=imread('2012213500.bmp');%读取灰度图片 subplot(221),imshow(I,256),title('256*256,256')%灰度级为256 subplot(222),imshow(I,50),title('256*256,50') %灰度级为50 subplot(223),imshow(I,10),title('256*256,10') %灰度级为10 subplot(224),imshow(I,5),title('256*256,5') %灰度级为5
数字图像处理课后参考答案
数字图像处理 第一章 1.1解释术语 (2)数字图像:为了便于用计算机对图像进行处理,通过将二维连续(模拟)图像在空间上离散化,也即采样,并同时将二维连续图像的幅值等间隔的划分成多个等级(层次)也即均匀量化,以此来用二维数字阵列并表示其中各个像素的空间位置和每个像素的灰度级数的图像形式称为数字图像。 (3)图像处理:是指对图像信息进行加工以满足人的视觉或应用需求的行为。 1.7 包括图像变化、图像增强、图像恢复、图像压缩编码、图像的特征提取、形态学图像处理方法等。彩色图像、多光谱图像和高光谱图像的处理技术沿用了前述的基本图像处理技术,也发展除了一些特有的图像处理技术和方法。 1.8基本思路是,或简单地突出图像中感兴趣的特征,或想方法显现图像中那些模糊了的细节,以使图像更清晰地被显示或更适合于人或及其的处理与分析。 1.9基本思路是,从图像退化的数学或概率模型出发,研究改进图像的外观,从而使恢复以后的图像尽可能地反映原始图像的本来面目,从而获得与景物真实面貌相像的图像。 1.10基本思路是,,在不损失图像质量或少损失图像质量的前提下,尽可能的减少图像的存储量,以满足图像存储和实时传输的应用需求。1.11基本思路是,通过数学方法和图像变换算法对图像的某种变换,以便简化图像进一步处理过程,或在进一步的图像处理中获得更好的处理效果。 1.12基本目的是,找出便于区分和描述一幅图像中背景和目标的方法,以方便图像中感兴趣的目标的提取和描述。 第二章 2.1解释下列术语 (18)空间分辨率:定义为单位距离内可分辨的最少黑白线对的数目,用于表示图像中可分辨的最小细节,主要取决于采样间隔值的大小。(19)灰度分辨率:是指在灰度级别中可分辨的最小变化,通常把灰度级数L称为图像的灰度级分辨率。 (20)像素的4邻域:对于图像中位于(x,y)的像素p来说,与其水平相邻和垂直相邻的4个像素称为该像素的4邻域像素,他们的坐标分别为(x-1,y)(x,y-1)(x,y+1)(x+1,y)。
数字图像处理简答题及答案..
数字图像处理简答题及答案 简答题 1、数字图像处理的主要研究内容包含很多方面,请列出并简述其中的4种。 2、什么是图像识别与理解? 3、简述数字图像处理的至少3种主要研究内容。 4、简述数字图像处理的至少4种应用。 5、简述图像几何变换与图像变换的区别。 6、图像的数字化包含哪些步骤?简述这些步骤。 7、图像量化时,如果量化级比较小会出现什么现象?为什么? 8、简述二值图像与彩色图像的区别。 9、简述二值图像与灰度图像的区别。 10、简述灰度图像与彩色图像的区别。 11、简述直角坐标系中图像旋转的过程。 12、如何解决直角坐标系中图像旋转过程中产生的图像空穴问题? 13、举例说明使用邻近行插值法进行空穴填充的过程。 14、举例说明使用均值插值法进行空穴填充的过程。 15、均值滤波器对高斯噪声的滤波效果如何?试分析其中的原因。 16、简述均值滤波器对椒盐噪声的滤波原理,并进行效果分析。 17、中值滤波器对椒盐噪声的滤波效果如何?试分析其中的原因。 18、使用中值滤波器对高斯噪声和椒盐噪声的滤波结果相同吗?为什么会出现这种现象?
19、使用均值滤波器对高斯噪声和椒盐噪声的滤波结果相同吗?为什么会出现这种现象? 20、写出腐蚀运算的处理过程。 21、写出膨胀运算的处理过程。 22、为什么YUV表色系适用于彩色电视的颜色表示? 23、简述白平衡方法的主要原理。 24、YUV表色系的优点是什么? 25、请简述快速傅里叶变换的原理。 26、傅里叶变换在图像处理中有着广泛的应用,请简述其在图像的高通滤波中的应用原理。 27、傅里叶变换在图像处理中有着广泛的应用,请简述其在图像的低通滤波中的应用原理。 28、小波变换在图像处理中有着广泛的应用,请简述其在图像的压缩中的应用原理。 29、什么是图像的无损压缩?给出2种无损压缩算法。 2、对于扫描结果:aaaabbbccdeeeeefffffff,若对其进行霍夫曼编码之后的结果是:f=01 e=11 a=10 b=001 c=0001 d=0000。若使用行程编码和霍夫曼编码的混合编码,压缩率是否能够比单纯使用霍夫曼编码有所提高? 31、DCT变换编码的主要思想是什么? 32、简述DCT变换编码的主要过程。 33、什么是一维行程编码?简述其与二维行程编码的主要区别。 34、什么是二维行程编码?简述其与一维行程编码的主要区别。 35、简述一维行程编码和二维行程编码的异同。 36、压缩编码算法很多,为什么还要采用混合压缩编码?请举例说明。 37、对于扫描结果:aaaabbbccdeeeeefffffff,若对其进行霍夫曼编码之后的结果是:f=01 e=11 a=10 b=001 c=0001 d=0000。若使用行程编码和霍夫曼编码的混合编码,压缩率是否能够比单纯使用行程编码有所提高? 38、连续图像和数字图像如何相互转换?
- 数字图像处理试卷及答案汇编
- 数字图像处理12-白平衡算法
- 最新数字图像处理算法实现精编版
- 《数字图像处理》试题及答案
- 数字图像处理试卷及答案
- 数字图像处理实验_阈值分割算法
- 数字图像处理算法及原理(七):最小二乘法拟合圆
- JAVA数字图像处理常用算法
- 基于FPGA的数字图像处理的基本算法研究与实现
- 数字图像处理实验_阈值分割算法
- 图像处理基本算法及要解决的主要问题
- 数字图像处理课后习题答案
- C数字图像处理算法(最终版)
- 数字图像处理整理经典
- 最新数字图像处理模拟题
- 基本数字图像处理算法的matlab实现
- 数字图像处理算法汇总
- 数字图像去噪典型算法及matlab实现
- 数字图像处理(matlab版)第八章 图像融合算法
- 数字图像处理