DSP芯片应用系列讲座_三_第5讲TMS320C28xDSP的系统控制和中断

D SP 芯片应用系列讲座(三)
第5讲 TM S 320C 28x D SP 的系统控制和中断
Ξ
杨 峡1,赵汉武1,张雄伟2
(1.解放军理工大学通信工程学院研究生1队,江苏南京210007;
2.解放军理工大学通信工程学院电子信息工程系)摘 要:T I 公司新近推出的TM S 320C 28x 系列32位定点D SP 芯片具有丰富的系统资源。
文中介绍了片内各部分配置及其特点:时钟控制灵活,提供了多种低功耗模式以供选择;多达56个通用I O 引脚均可复用,功能丰富;独特的寄存器保护模式确保程序运行稳定;P IE 中断扩展控制器则大大增强了芯片的中断处理能力。
关键词:寄存器;中断;数字信号处理器
中图分类号:TN P 911.72文献标识码:A 文章编号:CN 3221289(2005)0320071205
S ys tem C ontro l a nd Inte rrup ts of T MS 320C 28x DS P
YA N G X ia 1,ZH A O H an 2w u 1,ZH A N G X iong 2w ei 2
(1.Po stgraduate T eam 1I CE ,PLAU ST ,N anjing 210007,Ch ina ;
2.D epartm ent of E lectronic Info r m ati on Engineering I CE ,PLAU ST )
A bs tra c t :T he TM S 320C 28x 322b it fixed 2po in t digital signal p rocesso rs ,released recen tly by
T exas In strum en ts Inco rpo rated ,have abundan t system resou rces .T he featu res of each part of the ch i p w ere in troduced in th is p aper ,clock ing con tro l is m o re flex ib le ,several low 2pow er m odes ex 2ist fo r cho ice ,up to 56GP I O p in s can be m u lti p lexed ,un ique register p ro tecti on m ode en su res softw are runn ing ,and P IE con tro ller greatly i m p roves the capab ility of handling the p eri pheral in 2terrup ts .
Ke y w o rds :register ;in terrup t ;D SP
TM S 320C 28x (以下简称C 28x )系列D SP 芯片具有丰富的片内外设[1],包括时钟电路、通用I O 引脚
(GP I O )和外设中断扩展控制器(P IE )等。其中,C 28x 特有的P IE 使C 28x 可以处理多达96个中断,增强了芯片的中断处理能力。本文介绍了C 28x 系列D SP 芯片片内外设的功能、寄存器设置、片内外设寄存器的保护模式以及中断控制方式等[2]。
1 时钟电路
1.1 OSC 及PLL 模块
D SP 内部的PLL 模块提供了设备内部所有模块工作的基本时钟。C 28x D SP 的工作频率可达150第26卷第3期
2005年9月军 事 通 信 技 术Journal of M ilitary Comm unicati ons T echno logy V o l .26N o.3Sep.2005
Ξ收稿日期:2005203210;修回日期:2005204214
作者简介:杨 峡(1981-),女,硕士生.
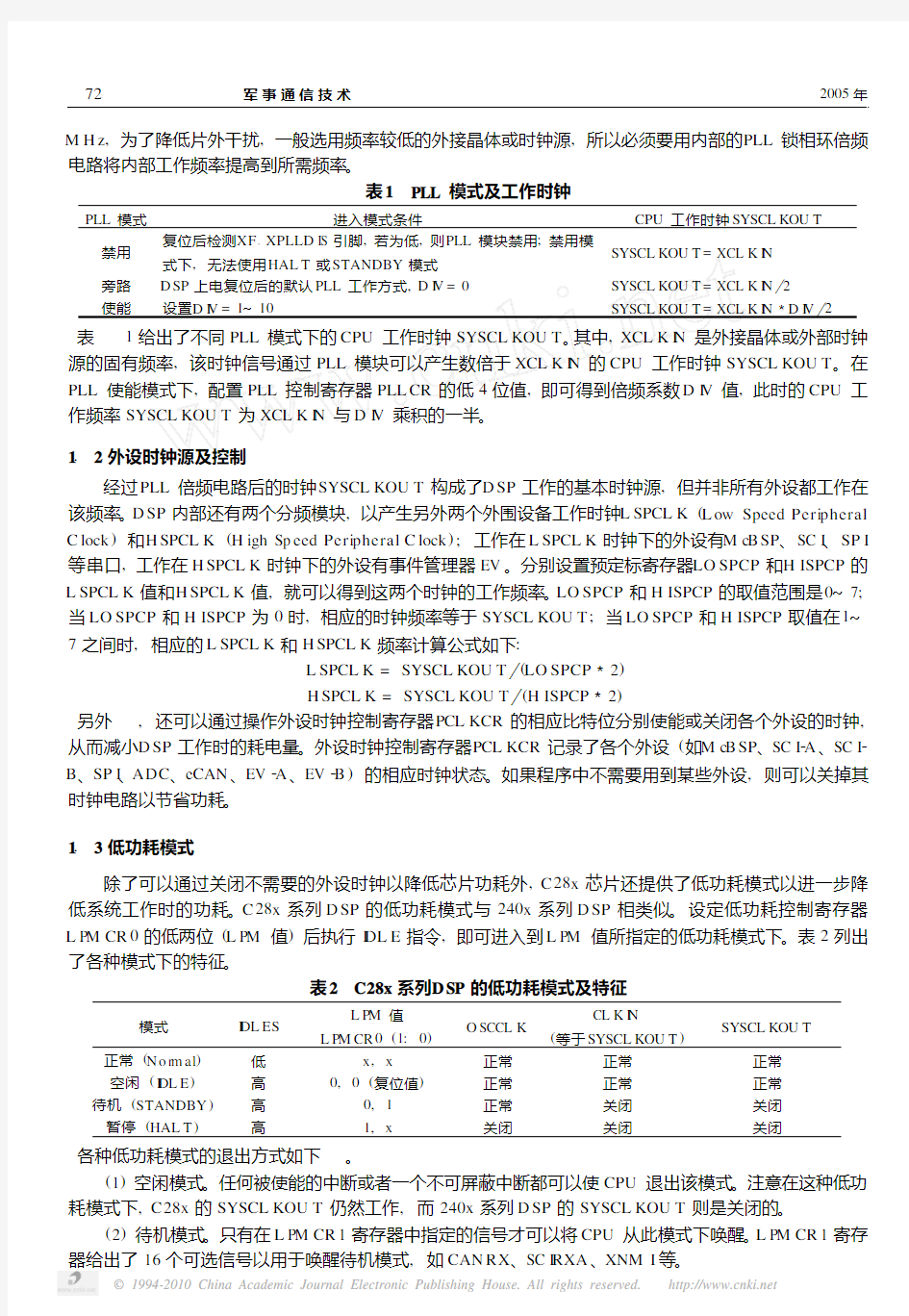
M H z,为了降低片外干扰,一般选用频率较低的外接晶体或时钟源,所以必须要用内部的PLL锁相环倍频电路将内部工作频率提高到所需频率。
表1 PLL模式及工作时钟
PLL模式进入模式条件CPU工作时钟SYSCL KOU T
禁用复位后检测XF-XPLLD IS引脚,若为低,则PLL模块禁用;禁用模
式下,无法使用HAL T或STANDBY模式
SYSCL KOU T=XCL K I N
旁路D SP上电复位后的默认PLL工作方式,D I V=0SYSCL KOU T=XCL K I N 2
使能设置D I V=1~10SYSCL KOU T=XCL K I N3D I V 2
表1给出了不同PLL模式下的CPU工作时钟SYSCL KOU T。其中,XCL K I N是外接晶体或外部时钟源的固有频率,该时钟信号通过PLL模块可以产生数倍于XCL K I N的CPU工作时钟SYSCL KOU T。在PLL使能模式下,配置PLL控制寄存器PLL CR的低4位值,即可得到倍频系数D I V值,此时的CPU工作频率SYSCL KOU T为XCL K I N与D I V乘积的一半。
1.2 外设时钟源及控制
经过PLL倍频电路后的时钟SYSCL KOU T构成了D SP工作的基本时钟源,但并非所有外设都工作在该频率。D SP内部还有两个分频模块,以产生另外两个外围设备工作时钟L SPCL K(L ow Speed Peri pheral C lock)和H SPCL K(H igh Sp eed Peri pheral C lock);工作在L SPCL K时钟下的外设有M c B SP、SC I、SP I 等串口,工作在H SPCL K时钟下的外设有事件管理器EV。分别设置预定标寄存器LO SPCP和H ISPCP的L SPCL K值和H SPCL K值,就可以得到这两个时钟的工作频率。LO SPCP和H ISPCP的取值范围是0~7;当LO SPCP和H ISPCP为0时,相应的时钟频率等于SYSCL KOU T;当LO SPCP和H ISPCP取值在1~7之间时,相应的L SPCL K和H SPCL K频率计算公式如下:
L SPCL K=SYSCL KOU T (LO SPCP32)
H SPCL K=SYSCL KOU T (H ISPCP32)
另外,还可以通过操作外设时钟控制寄存器PCL KCR的相应比特位分别使能或关闭各个外设的时钟,从而减小D SP工作时的耗电量。外设时钟控制寄存器PCL KCR记录了各个外设(如M c B SP、SC I2A、SC I2 B、SP I、ADC、eCAN、EV2A、EV2B)的相应时钟状态。如果程序中不需要用到某些外设,则可以关掉其时钟电路以节省功耗。
1.3 低功耗模式
除了可以通过关闭不需要的外设时钟以降低芯片功耗外,C28x芯片还提供了低功耗模式以进一步降低系统工作时的功耗。C28x系列D SP的低功耗模式与240x系列D SP相类似。设定低功耗控制寄存器L PM CR0的低两位(L PM值)后执行I DL E指令,即可进入到L PM值所指定的低功耗模式下。表2列出了各种模式下的特征。
表2 C28x系列D SP的低功耗模式及特征
模式I DL ES
L P M值
L P M CR0(1:0)
O SCCL K
CL K I N
(等于SYSCL KOU T)
SYSCL KOU T
正常(N o r m al)低x,x正常正常正常
空闲(I DL E)高0,0(复位值)正常正常正常待机(STANDBY)高0,1正常关闭关闭
暂停(HAL T)高1,x关闭关闭关闭
各种低功耗模式的退出方式如下。
(1)空闲模式。任何被使能的中断或者一个不可屏蔽中断都可以使CPU退出该模式。注意在这种低功耗模式下,C28x的SYSCL KOU T仍然工作,而240x系列D SP的SYSCL KOU T则是关闭的。
(2)待机模式。只有在L PM CR1寄存器中指定的信号才可以将CPU从此模式下唤醒。L PM CR1寄存器给出了16个可选信号以用于唤醒待机模式,如CAN RX、SC I RXA、XNM I等。
27 军 事 通 信 技 术 2005年
(3)暂停模式。只有XR S 和XNM I 外部信号才可以将CPU 从暂停模式下唤醒。但只有外部中断控制寄存器XNM I CR 的最低位为1时,XNM I 信号才能将CPU 从暂停模式下唤醒。在暂停模式下,所有时钟都被关闭,PLL 模块和看门狗模块也被关闭。
2 通用I O 引脚(GP I O )
C 28x 提供了多达56个可以独立编程控制的通用I O 引脚。GP I O 引脚都有两个功能:通用I O 或者外设接口。外设接口包括串口M c B SP 、SC I 、SP I 、eCAN 以及事件管理器等。通过GP I O 复用寄存器来配置引脚的状态。如果选择作为数字I O 口,配置相应的复用寄存器可以定义引脚的各种特性。
每个GP I O 引脚都可通过设置相关寄存器的某些位来配置其属性,例如:①GPx M U X .b it :为0时配置为I O 引脚,为1时配置为外设接口。复位后默认为I O 引脚。②GPxD I R .b it :为0时配置为输入脚,为1时配置为输出脚。复位后的状态是输入脚。③GPxDA T .b it :只对输出脚使用。为0时输出0,为1时输出1。可读写。④GPxSET .b it :只对输出使用。为1时将输出脚置1,写0无效。只可写。⑤GPxCL EA R .b it :只对输出脚使用。为0时将输出脚清0,写1无效。只可写。⑥GPxTO GGL E .b it :只对输出脚使用。为1时将相应引脚输出状态取反,写0无效。只可写。
限于篇幅,这里以F 区GP I O 脚为例说明GP I O 引脚的一般配置方法。F 区复用寄存器地址为0x 000070D 4,程序中用GPFM U X 代替,其6、7位为CAN 总线与GP I O 复用。
如果在设计中要使用到CAN 总线,则必须使能外设接口:
GPFM U X .6=1;
配置为外设接口GPFM U X .7=1;
相反,如果想要复用CAN 总线接口为通用I O 引脚,则需要禁用CAN 模块,并设置寄存器:
GPFM U X .6=0; 配置为GP I O ,必须禁用CAN 口
GPFM U X .7=0;
下列语句可以配置GP I O 的输入输出状态:
GPFD I R .6=0;
配置CAN TX 脚为通用输入脚GPFD I R .7=1; 配置CAN RX 脚为通用输出脚
另外,引脚数据的状态可以运用其它几个寄存器来操作,从而达到输入输出相应数据的目的。通过运用这些GP I O 引脚,开发者可以为D SP 应用系统添加丰富的外围设备,从而提高芯片开发的方便性和灵活性。
3 外设寄存器保护模式
为了保护外设寄存器中的数据,C 28x 系列D SP 芯片拥有两种针对这些寄存器的保护机制,即EAL 2LOW 保护模式和写—读保护模式。
3.1 EALLOW 保护模式
表3 EALLOW 模式功能表
EALLOW 比特位CPU 写CPU 读JTA G 写JTA G 读0禁止允许允许允许1允许允许允许允许 EALLOW 保护模式可以防止不适当的CPU 写操作造成寄存器数据丢失。
表3列出该模式的功能。
此模式受ST 1寄存器的EALLOW 比特位控
制。此比特位清0,启动EALLOW 保护。EALLOW 指令可使此比特位置1,ED IS 指令使此比特位清0。
受EALLOW 模式保护的寄存器有:芯片仿真寄存器、FLA SH 寄存器、CS M 寄存器、P IE 中断向量表、系统控制寄存器、GP I O 复用寄存器、eCAN 寄存器。
3
7 第3期 杨 峡等:TM S 320C 28x D SP 的系统控制和中断
47 军 事 通 信 技 术 2005年
3.2 写—读保护模式
写—读保护模式可以保证对受保护区域先写后读的顺序。举例说明。
M OV@R EG1,AL
TB IT@R EG2,#B IT-X
上面两条指令,按照正常的流水线模式,会先读R EG2再写R EG1,这与程序本意不符,一旦启动写—读保护模式,则强行将读操作延迟3个流水线阶段,以保证先写R EG1后读R EG2。
将D EV I CECN F寄存器的EN PRO T位置1,可以启动写—读保护模式。该模式的保护范围可由PRO T STA R T寄存器(保护区间的起始地址)和PRO T STA R T寄存器(保护区间大小)来设置。默认情况下,受保护范围是数据存储空间的0x00004000到0x00008000区间。
4 中断
4.1 中断概述
中断是指使CPU暂停执行当前程序而转去执行中断子程序(ISR)的过程[3]。C28x系列D SP中断可由硬件(中断引脚、外部设备、片内外设)或软件(I N TR、OR IFR指令或TRA P指令)触发。如果在同一时刻有多个中断触发,CPU会按照设置的中断优先级依次响应中断。
中断分为两类:①可屏蔽中断(可通过软件禁止);②不可屏蔽中断(不能被软件禁止)。
CPU一般通过以下四个步骤处理中断:①检测到中断请求信号;②允许中断:对于可屏蔽中断来说需要满足一定的条件,对于不可屏蔽中断则立即响应;③保护现场(自动将寄存器ST0,T,AL,A H,PL,
PH,A R0,A R1,D P,ST1,DB GSTA T,PC,IER压栈保存),读取中断向量并将它赋给程序指针PC。④转入执行中断服务子程序(ISR)。
C28x具有包括复位中断向量在内的32个中断向量,它们构成了CPU中断向量表。每个中断向量对应于中断服务子程序ISR入口的22位地址。当多个中断同时发生时,CPU会按照中断优先级来处理中断,优先级高的先响应,优先级低的后响应。
4.2 中断分类
4.2.1 可屏蔽中断
C28x CPU的可屏蔽中断包括I N T1~I N T14、DLO G I N T和R TO S I N T。其中,I N T1~I N T14是普通GP I O中断,DLO G I N T和R TO S I N T中断只在实时仿真时使用。可屏蔽中断由控制寄存器来控制。①中断标志寄存器(IFR):每个比特位对应一个可屏蔽中断。IFR位为1表明有中断等待处理。②中断使能寄存器(IER):每个比特位对应一个可屏蔽中断。IER位为1表明相应的中断打开。③CPU调试中断使能寄存器(DB G IER):功能与IER相同,仅用于实时仿真模式。④全局中断使能位I N TM:ST1寄存器的第1个比特。当它为0时,全局中断使能开。在实时仿真模式中,I N TM被忽略。
4.2.2 不可屏蔽的中断
当C28x检测到不可屏蔽中断时,会立即转入相应的中断服务子程序。不可屏蔽中断包括:①所有软件中断(I N TR、TRA P指令):执行I N TR中断指令时,相应的IER位会自动清0,而TRA P指令不对IFR 或IER产生影响。②硬件中断NM I:由NM I输入管脚的低电平触发。③非法指令中断(Illegal2in structi on trap):遇到非法的指令操作时触发此中断。④硬件复位中断(R S):当输入信号R S触发此中断时,CPU 寄存器被复位到初始值,然后转入执行相应的复位中断子程序。
4.3 外设中断扩展控制器P IE
28系列芯片拥有丰富的片内外设,每个外设根据不同的事件可以产生一个或多个中断请求。而在
CPU 层次上,最多可以处理32个中断,因此,如果有更多的中断触发事件,仅依靠CPU 已无法处理。C 28x 通过外设中断扩展控制器(P IE )增加了可用的中断数目,增强了芯片的中断处理能力。C 28x 系列D SP 芯片的P IE 可以处理多达96个中断。将P IECTRL 寄存器的0比特位置1,可以启用P IE 模块。
4.3.1 P IE 中断扩展的原理
P IE 扩展出的96个中断分为12组,分别对应CPU 中断I N T 1到I N T 12。每组8个中断复用成一个CPU 中断I N T x 。复用过程主要由三个层次的使能来实现。
(1)外设层次。当外设有中断事件发生时,寄存器中相应的中断标志位(IF )置1。如果相应的中断使能标志位(IE )是置1的,则此外设向P IE 产生一个中断请求信号;若IE 为0,则保持IF 不变,等到IE 置1时,外设再向P IE 产生中断请求信号。
(2)P IE 层次。96个中断被分为12组,对应12个中断标志寄存器(P IE IFR x )和12个中断使能寄存器(P IE IER x )。每组8个中断,都有对应的中断标志位P IE IFR x .y 和中断使能位P IE IER x .y 。每个P IE 中断组都有一个中断接收信号P IEA CKx ,P IE 发出中断请求信号,相应的P IE IFR x .y 被置1,如果P IE IER x .y 也是1,则P IE 会检测相应的P IEA CKx ,如果P IEA CKx 是0,则P IE 向CPU 发出中断请求I N T x ,如果是1,则P IE 等到它清零后再向CPU 发出中断请求。如果同一P IE 中断组中同时有多个中断发生,则P IE 按照组内中断优先级来处理。
(3)CPU 层次。当P IE 将中断请求送给CPU 后,CPU 中相应I N T x 的标志位IFR 被置1,但这个中断要等到满足相应的使能条件才能被CPU 响应。
综上,P IE 扩展中断数目,其最根本的原理就是增加了P IE 一级的中断使能和优先级判断。CPU 决定I N T 1到I N T 12的中断优先级,P IE 决定12组中断中,每组8个中断的优先级。
4.3.2 P IE 中断向量表及中断向量表的映射选择
D SP 芯片运行时,扩展后的P
E I 中断向量表必须存储在P IE RAM 中。P IE RAM 是SA RAM 中一个特殊的256×16的存储块,它的起始地址是数据存储空间的0x 000D 00。
C 28x 系列
D SP 芯片有5个可用的中断向量表,到底使用哪个取决于中断向量表映射模式的选择。
控制中断向量表映射的比特位有:VM A P (状态寄存器ST 1的第4个比特位)、M 0M 1M A P (ST 1的第12个比特位)、M P M C (X I N TCN F 2寄存器的第9个比特位)、EN P IE (P IECTRL 寄存器的第1个比特位)。它们对模式选择的影响如表4所示。
对于C 28x 的芯片,M 0、M 1模式是保留不用的模式,BROM 模式只在测试时才用到,实际应用中都使用P IE 映射模式(UM A P =1且EN P IE =1)。
表4 中断向量表映射模式
向量表映射模式
所在存储器地 址VM A P M 0M 1M A P M P M C EN P IE M 1模式
M 1SA RAM 0x 00000020x 00003F 00X X M 0模式
M 0SA RAM 0x 00000020x 00003F 01X X BROM 模式
ROM 0x 3FFFC 020x 3FFFFF 1X 00X I N T F 模式
扩展寄存器0x 3FFFC 020x 3FFFFF 1X 10P IE 模式P IE RAM 0x 000D 0020x 000D FF 1X X 1本文简要介绍了C 28x 系列D SP 芯片的片内外设资源,重点对C 28x 特有的外设中断扩展控制器进行了介绍。丰富的片内外设资源,增强的中断处理能力,使得该系列D SP 芯片在多种场合得到灵活应用。参考文献:
[1] T exas Instrum ents .TM S 320F 281x TM S 320C 281x digital signal p rocesso rs data m anual [EB OL ].h ttp : www .ti
.com ,2004212211.
[2] T exas Instrum ents .TM S 320F 28x D SP system contro l and interrup ts reference guide [EB OL ].h ttp : www .ti
.com ,2004212215.
[3] 张雄伟,陈 亮,徐光辉.D SP 芯片的原理及开发应用[M ].第3版.北京:电子工业出版社,2003.
57 第3期 杨 峡等:TM S 320C 28x D SP 的系统控制和中断
14_DSP技术原理及应用教程_课后答案
1 .1 数字信号处理器与一般通用计算机和单片机的主要差别有哪些? 答:在通用的计算机上用软件实现该方法速度太慢, 适于算法仿真; 在通用计算机系统上加上专用的加速处理机实现该方法专用性较强,应用受限制,且不便于系统 的独立运行; 用通用的单片机实现这种方式多用于一些不太复杂的数字信号处理,如简单的PID控制算法; 用通用的可编程DSP芯片实现与单片机相比,DSP芯片具有更加适合于数字信号处理的软件及硬件资源,可用于复杂的数字信号处理算法; 用专用的DSP芯片实现在一些特殊场合, 要求信号处理速度极高, 用通用的DSP 芯片很难实现,而专用的DSP 芯片可以将相应的信号处理算法在芯片内部用硬件实现,不需要编程。 1 .4 什么是冯·诺埃曼结构计算机, 什么是哈佛结构计算机, 二者的特点是什么? 答:冯.诺曼结构:将指令、数据存储在同一个存储器中,统一编址,译稿指令计数器提供的地址来区分是指令还是数据。取指令和取数据都访问统一存储器,数据吞吐率低。 哈佛结构:程序和数据存储在不同的存储空间,程序存储空间和数据存储空间是两个相互独立的存储空间,每个存储空间独立编址,独立访问。 1 .8 DSP的工作电压越来越低,内核电压已低至1V,这样做有何意义?为什么DSP内核工作电压和I/O工作电压不一样? 答:集成电路速度越来越快,随之而来,功耗越来越大,这样散热就是很大的问题.在芯片走线尺寸不变的情况下,内部阻抗也不变,降低工作电压会降低功耗,这样能再较高频率下芯片发热较少。 内核不容易受到外部干扰,所以电压可以做的较低,但IO容易受外部信号干扰,保持较高电压容易是器件工作稳定,这是功耗和稳定性的折中。 1 .10 定点DSP和浮点DSP有什么区别?在具体应用中, 应如何选择? 答:在浮点DSP中,数据即可以表示成整数,也可以表示成浮点数。浮点数在运算中,表示数的范围由于其指数可自动调节,因此可避免数的规格化和溢出等问题。但浮点DSP 一般比定点DSP 复杂, 成本也较高。 在定点DSP中, 数据采用定点表示方法。它有两种基本表示方法:整数表示方法和小数表示方法。整数表示方法主要用于控制操作、地址计算和其他非信号处理的应用, 而小数表示方法则主要用于数字和各种信号处理算法的计算中 2 .4 当要使用硬中断INT3作为中断响应矢量时,请问可屏蔽中断寄存器IMR和中断标志寄存器IFR应如何设置? 答:IFR中INT3位=1,IMR中INT3位=1,使能中断。2 .5 若处理器方式寄存器PMST的值设为01A0H,而中断矢量为INT3,那么在中断响应时, 程序计数器指针PC的值为多少? 答:PMST中IPTR=(000000011)b,int3中断向量号为24H,做移量为后变为60H,则中断响应时程序计数器指针PC=01E0H. 2 .10 DSP如何与不同速度的片外存储器及其他外设进行数据交换? 答:软件可编程等待状态发生器可以将外部总线周期扩展到7个机器周期,以使’C54x能与低速外部设备接口。而需要多于7个等待周期的设备,可以用硬件READY线来接口。 2 .11 TMS320C54x可进行移位操作,它的移位范围是多少? 答:’C54x的移位操作最多可以左移31位,或右移16位。(-16~31) 2 .1 3 为什么说应尽量利用DSP的片内存储器? 答:与片外存储器相比,片内存储器不需要插入等待状态,因此成本低,功耗小。 2 .14 如何操作通用I/ O 引脚XF和BIO? 答:XF信号可以由软件控制。通过对STl中的XF位置1得到高电平,清除而得到低电平。对状态寄存器置位的指令SSBX和对状态寄存器复位的指令RSBX可以用来对XF置位和复位。同时XF引脚为高电平和低电平,亦即CPU向外部发出1和0信号。 程序可以根据BIO的输入状态有条件地跳转,可用于替代中断。条件执行指令(XC)是在流水线的译码阶段检测BIO的状态,其它条件指令(branch、call和return)是在流水线的读阶段检测BIO 的状态的。 4 .1 写出汇编语言指令的格式, 并说明应遵循怎样的规则? 答:助记符指令格式: [标号][:] 助记符[操作数列表] [;注释] 代数指令格式: [标号][:] 代数指令[;注释] 应遵循下列规则: ①语句的开头只能是标号、空格、星号或分号。 ②标号是可选项,如果使用,必须从第一列开始。 ③每个域之间必须由一个或多个空格来分开。制表符等同于空格的作用。
DSP原理及其应用技术_课程设计_报告
郑州航空工业管理学院 电子通信工程系 DSP原理及应用课程设计报告 设计题目:基于TMS320F2812 DSP微处理器的最小系统设计 学号:********** 专业:电子信息工程专业 设计日期:2012年6月14日 指导老师:赵成陈宇
设计任务 1、利用Protel软件绘制并添加TMS320F2812的原理图库; 2、利用Protel软件绘制TMS320F2812最小系统的电路原理图,包括时钟电路模块,电源模块、复位电路模块、JTAG接口模块; 3、安装最小系统电路,在CCS下建立工程,编译并将其下载到TMS320F2812最小系统中运行。 相关设备 PC机,CCS集成开发环境,最小系统电路板及元件,XDS510仿真调试器,外用表,示波器,稳压电源。 设计原理 TMS320F2812 DSP微处理器属于通用可编程微处理器,在应用时涉及硬件电路设计及软件设计,在理论课部分,主要是了解了F2812的体系架构及软件开发的相关知识,在具体使用时,需要绘制电路原理图及版图。 TMS320F2812 DSP微处理器运行的基本环境包括时钟电路、电源电路、复位电路及JTAG接口调试电路等,为了便于测试系统的运行情况,一般在其外围直接设计串口通信电路及相关的测试电路,这里即在外围配置了XF及串口通信电路。 可以使用Protel或其他电路版图设计软件绘图,其中需要用到学习过的F2812的封装、管脚分布、时钟电路、复位电路等知识。 可以参考教材附录部分的电路原理图。 通过F2812最小电路的设计,可以将理论与实践统一联系,更深入地理解F2812的开发方法。 应用基础 能使用Protel设计电路原理图; 了解F2812硬件的相关知识及电路设计; 能使用CCS建立并调试DSP工程。 设计报告 在课程设计的最后一次指导课上提交打印版。 目录 一、设计的目的和意义…………………………………………………………………3页 二、CCS软件概述………………………………………………………………………3页
DSP原理与应用技术-考试知识点总结
第一章 1、DSP系统的组成:由控制处理器、DSPs、输入/输出接口、存储器、数据传输网络构成。P2图1-1-1 2、TMS320系列DSPs芯片的基本特点:哈佛结构、流水线操作、专用的硬件乘法器、特殊的DSP指令、快速的指令周期。 3、哈佛结构:是一种将程序指令储存和数据储存分开的储存器结构。特点:并行结构体系,是将程序和数据存储在不同的存储空间中,即程序存储器和数据存储器是两个相互独立的存储器,每个存储器独立编址,独立访问。系统中设置了程序和数据两条总线,使数据吞吐率提高一倍。 4、TMS320系列在哈佛结构之上DSPs芯片的改进:(1)允许数据存放在程序存储器中,并被算数运算指令直接使用,增强芯片灵活性(2)指令储存在高速缓冲器中,执行指令时,不需要再从存储器中读取指令,节约了一个指令周期的时间。 5、冯诺依曼结构:将指令、数据、地址存储在同一存储器中,统一编址,依靠指令计数器提供的地址来区分是指令、数据还是地址,取指令和去数据都访问同一存储器,数据吞吐率低。 6、流水线操作:TMS320F2812采用8级流水线,处理器可以并行处理2-8条指令,每条指令处于流水线的不同阶段。 解释:在4级流水线操作中。取 指令、指令译码、读操作数、执 行操作可独立地处理,执行完全 重叠。在每个指令周期内,4条 不同的指令都处于激活状态,每 条指令处于不同的操作阶段。 7、定点DSPs芯片:定点格式工作的DSPs芯片。 浮点DSPs芯片:浮点格式工作的DSPs芯片。 (定点DSPs可以浮点运算,但是要用软件。浮点DSPs用硬件就可以)8、DSPs芯片的运算速度衡量标准:指令周期(执行一条指令所需时
DSP原理及应用-(修订版)--课后习题答案
第一章: 1、数字信号处理的实现方法一般有哪几种? 答:数字信号处理的实现是用硬件软件或软硬结合的方法来实现各种算法。(1) 在通用的计算机上用软件实现;(2) 在通用计算机系统中加上专用的加速处理机实现;(3) 用通用的单片机实现,这种方法可用于一些不太复杂的数字信号处理,如数字控制;(4)用通用的可编程 DSP 芯片实现。与单片机相比,DSP 芯片具有更加适合于数字信号处理的软件和硬件资源,可用于复杂的数字信号处理算法;(5) 用专用的 DSP 芯片实现。在一些特殊的场合,要求的信号处理速度极高,用通用 DSP 芯片很难实现( 6)用基于通用 dsp 核的asic 芯片实现。 2、简单的叙述一下 dsp 芯片的发展概况? 答:第一阶段, DSP 的雏形阶段( 1980 年前后)。代表产品: S2811。主要用途:军事或航空航天部门。第二阶段, DSP 的成熟阶段( 1990 年前后)。代表产品: TI 公司的 TMS320C20 主要用途:通信、计算机领域。第三阶段, DSP 的完善阶段( 2000 年以后)。代表产品:TI 公司的 TMS320C54 主要用途:各个行业领域。 3、可编程 dsp 芯片有哪些特点? 答: 1、采用哈佛结构( 1)冯。诺依曼结构,( 2)哈佛结构( 3)改进型哈佛结构2、采用多总线结构 3.采用流水线技术4、配有专用的硬件乘法-累加器5、具有特殊的 dsp 指令6、快速的指令周期7、硬件配置强8、支持多处理器结构9、省电管理和低功耗 4、什么是哈佛结构和冯。诺依曼结构?它们有什么区别? 答:哈佛结构:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。冯。诺依曼结构:该结构采用单存储空间,即程序指令和数据共 用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。 区别:哈佛:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。冯:当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。 5、什么是流水线技术? 答:每条指令可通过片内多功能单元完成取指、译码、取操作数和执行等多个步骤,实现多条指令的并行执行,从而在不提高系统时钟频率的条件下减少每条指令的执行时间。利用这种流水线结构,加上执行重复操作,就能保证在单指令周期内完成数字信号处理中用得最多的乘法 - 累加运算。(图)6、什么是定点 dsp 芯片和浮点 dsp 芯片?它们各有什么优缺点? 答:若数据以定点格式工作的称为定点 DSP 芯片。若数据以浮点格式工作的称为浮点 DSP芯片。
DSP原理及应用教学大纲
《DSP原理及应用》实验教学大纲 学习DSP的目的是应用其进行研发及工程实践,故实验是《DSP原理及应用》课程学习中的重要环节。通过实验,可以对DSP器件的功能进行实际操作,并在实际操作中熟悉器件的使用特性。实验是DSP应用的基本内容,为学生今后从事相关工作打下基础。 本实验有以下任务:(1)掌握如何使用DSP仿真平台;(2)掌握DSP内部结构和工作原理;(3)熟悉DSP 的指令系统;(4)熟悉用DSP实现各种基本算法。通过实验使学生加深对DSP基本理论、硬件系统、指令系统的理解,学会用仿真器进行开发,使书本上枯燥的内容变得生动,增加学生学习本课程的兴趣。此外学生的实验技能、动手能力、分析问题、解决问题的能力都将得到培养,为进一步进行工程实践奠定良好的基础。 三、实验方式 1、实际操作—要求根据目的要求完成各实验项目,对实验结果进行分析整理并写出实验报告。 2、上机设计仿真—学生先根据实验要求设计出实验电路和实验步骤,后上机进行设计仿真,最后记录仿真结果并分析写出实验报告。 3、基本要求: (1)掌握DSP仿真开发系统的结构。掌握仿真器的连接和安装,熟悉开发软件Code Composer Studio 的界面和基本操作。 (2)掌握TMS320C54x芯片的硬件结构,了解CPU、寄存器和存储器中各数据的含义。 (3)了解TMS320C54x芯片外部设备的工作原理,熟悉数据的处理过程和中断。 (4)了解TMS320C54x芯片的指令系统,熟悉各种指令和基本算法。 (5)能够独立完成简单小程序的编写和调试。 通过实验,使学生基本具有DSP的开发能力。 四、实验项目设置、学时分配及基本要求
DSP技术与应用习题库及答案王忠勇讲解
一、填空题 第一章 1.数字信号处理特点大量的实时计算(FIR IIR FFT),数据具有高度重复(乘积和操作在滤波、卷积和FFT中等常见)。 2.信号处理的作用信号改善;信号检测、估计等 3.信号处理的方法信号波形分析/变换、滤波、现代谱估计/分析、自适应滤波等。 4.信息系统包括采集、传输、处理、等。5.数字信号处理常用算法有FIR 滤波、IIR 滤波、离散傅里叶变换、卷积、离散余弦变换等 6.处理器速度的提高得益于器件水平、处理器结构、并行技术等。7.DSP结构特点包括采用哈佛结构体系、采用流水线技术、硬件乘法器、多处理单元、特殊的DSP指令。 8.DSP芯片按用途分为通用型DSP 、专用型DSP 。9.DSP芯片按数据格式分为浮点型、定点型。 第二章 1.C28x芯片具有C27X、C28X、C2XLP操作模式。2.C28x芯片模式选择由ST1中的AMODE和OBJMODE位组合来选定模式。 3.CPU内核由CPU、仿真逻辑、接口组成。 4.CPU主要特性是保护流水线、独立寄存器空间算术逻辑单元(ALU)、地址寄存器算术单元(ARAU)、循环移位器乘法器。 5.CPU信号包括存储器接口信号、时钟和控制信号、复位和中断信号、仿真信号。 6.TMS320F2812组成特点是32位、定点、改进哈佛结构、循环的寻址方式。7.存储器接口有3组地址总线。 8.存储器接口有3组数据总线。 9.存储器接口地址总线有PAB、DRAB、DWAB、 10.CPU中断控制寄存器有IFR 、IER 、DBGIER。 11.ACC累加器是32位的,可表示为ACC、AH、AL。12.被乘数寄存器是32 位的,可表示为XT、T、TL 。13.乘数结果寄存器是32位的,可表示为P 、PH、PL。14.数据页指针寄存器16 位的,有65536 页,每页有64个存储单元。数据存储空间容量是4M字。 15.堆栈指针复位后SP指向地址是0x000400h 。 第三章 1.DSP芯片内部包含存储器类型有片内双访问存储器(DARAM)、片内单访问程序/数据RAM(SARAM)、掩膜型片内ROM存储器、闪速存储器(Flash)一次性可编程存储器(OTP)。 2.C28x具有32 位的数据地址和22位的程序地址,总地址空间可达4G字(每个字16位)的数据空间和4M字的程序空间。 3.在程序地址中保留了64个地址作为CPU的32个中断向量。
DSP控制器原理及技术实验报告
实验二定时器 一.实验目的 1. 熟悉如何编写 28335 的中断服务程序; 2. 掌握长时间间隔的定时器的处理。 3. 掌握片外设的设置方法。 二.实验容 1. 系统初始化; 2. DSP 的初始设置; 3. 定时中断的编写; 三.实验要求 1. 通过本实验,熟悉中断的结构及用中断程序控制程序流程,掌握定时器的应用; 2. 分析给定程序代码功能,并在实验报告中给出程序流程图和必要的注释; 3. 改变定时时间,下载运行,观察结果,在报告中计算出运行时间。 四.实验背景知识 TMS320F28335 片上有 3 个 32-位 CPU 定时器,分别被称为 CPU 定时器 0、1 和2。每个定时器中均有一个 32-位减计数器,当计数器减到 0 时,产生一个中断。其中,CPU 定时器 0 的中断 TINT0 为 PIE 中断,CPU 定时器 1 的中断 TINT1 直接连到 CPU中断的 INT13,CPU 定时器 2 的中断 TINT2 直接连到 CPU 中断的 INT14。如下图所示。 CPU 定时器 2 保留为实时操作系统(如 DSP BIOS)使用,而 CPU 定时器 0、 1 则可被用户使用,SEED-DEC28335 未使用 CPU 定时器 0,用户可以根据应用的需要灵活使
用。 CPU 定时器的原理框图和定时中断如下图所示。 定时器在工作过程中,首先用 32 位计数寄存器(TIMH:TIM)装载周期寄存器(PRDH:PRD)部的值。计数寄存器根据 SYSCLKOUT 时钟递减计数。当计数寄存器等于 0 时,定时器中断输出产生一个中断脉冲。 定时器计数器(TIMH: TIM): TIM 寄存器保存当前 32 位定时器计数值的低 16 位,TIMH 寄存器保存高 16 位。每隔(TDDRH:TDDR+1)个时钟周期 TIMH:TIM 减 1,当 TIMH:TIM 递减到 0 时,TIMH:TIM 寄存器重新装载 PRDH:PRD 寄存器保存的周期值,并产生定时器中断TINT信号。 定时器周期寄存器(PRDH:PRD):PRD 寄存器保存 32 位周期值的低 16 位,PRDH 保存高 16 位。当 TIMH: TIM 递减到零时,在下次定时周期开始之前 TIMH: TIM 寄存器重新装载 PRDH:PRD 寄存器保存的周期值;当用户将定时器控制寄存器(TCR)的定时器重新装载位(TRB)置位时, TIMH: TIM 也会重新装载 PRDH: PRD 寄存器保存的周期值。 五.实验准备 1 实验硬件准备 1. 将 DSP 仿真器与计算机连接好; 2. 将 DSP 仿真器的 JTAG 插头与 SEED-DEC28335 单元的 J18 相连接; 3. 启动计算机,当计算机启动后,打开SEED-DTK28335的电源。观察 SEED-DTK_MBoard 单元的+5V,+3.3V,+15V,-15V 的电源指示灯灯及 SEED-DEC28335 的电源指示灯 D2 是否均亮;若有不亮,断开电源,检查电源。 2 实验软件准备
DSP原理及应用邹彦主编课后答案
第一章 1、数字信号处理实现方法一般有几种?答:课本P2(2.数字信号处理实现) 2、简要地叙述DSP芯片的发展概况。答:课本P2( DSP芯片的发展概况) 3、可编程DSP芯片有哪些特点?答:课本P3( DSP芯片的特点) 4、什么是哈佛结构和冯诺依曼结构?他们有什么区别?答:课本P3-P4(1.采用哈佛结构) 5、什么是流水线技术?答:课本P5(3.采用流水线技术) 6、什么是定点DSP芯片和浮点DSP芯片?它们各有什么优缺点? 答:定点DSP芯片按照定点的数据格式进行工作,其数据长度通常为16位、24位、32位。 定点DSP的特点:体积小、成本低、功耗小、对存储器的要求不高;但数值表示范围较窄,必须使用定点定标的方法,并要防止结果的溢出。 浮点DSP芯片按照浮点的数据格式进行工作,其数据长度通常为32位、40位。 由于浮点数的数据表示动态范围宽,运算中不必顾及小数点的位置,因此开发较容易。但它的硬件结构相对复杂、功耗较大,且比定点DSP芯片的价格高。通常,浮点DSP芯片使用在对数据动态范围和精度要求较高的系统中。 7、DSP技术发展趋势主要体现在哪些方面?答:课本P9(发展技术趋势) 8、简述DSP系统的构成和工作过程。答:课本P10(系统的构成) 9、简述DSP系统的设计步骤。答:课本P12(系统的设计过程) 10、DSP系统有哪些特点?答:课本P11(系统的特点) 11、在进行DSP系统设计时,应如何选择合理的DSP芯片?答:课本P13(芯片的选择) 12、TMS320VC5416-160的指令周期是多少毫秒?它的运算速度是多少MIPS? 解:f=160MHz,所以T=1/160M==;运算速度=160MIPS 第二章 1、TMS320C54x芯片的基本结构都包括哪些部分?答:课本P17(各个部分功能如下) 2、TMS320C54x芯片的CPU主要由几部分组成?答:课本P18( 3、处理器工作方式状态寄存器PMST中的MP/MC、OVLY和DROM3个状态位对’C54x的存储空间结构有何影响?答:课本P34(PMST寄存器各状态位的功能表) 4、TMS320C54x芯片的内外设主要包括哪些电路?答:课本P40(’C54x的片内外设电路) 5、TMS320C54x芯片的流水线操作共有多少个操作阶段?每个操作阶段执行什么任务?完成一条指令都需要哪些操作周期?答:课本P45(1.流水线操作的概念) 6、TMS320C54x芯片的流水线冲突是怎样产生的?有哪些方法可以避免流水线冲突? 答:由于CPU的资源有限,当多于一个流水线上的指令同时访问同一资源时,可能产生时序冲突。解决的办法:①由CPU通过延时自动解决;②通过程序解决,如重新安排指令或插入空操作指令。 7、TMS320C54x芯片的串行口有哪几种类型?答:课本P42(TMS320C54x芯片的串行口) 8、TMS320VC5402 共有多少可屏蔽中断?它们分别是什么?NMI和RS属于哪一类中断源?答:课本P56(对VC5402来说,这13个中断的硬件名称为...... RS 和NMI属于外部硬件中断。) 9、试分析下列程序的流水线冲突,画出流水线操作图。如何解决流水线冲突?(解题时参考课本P52【例】) STLM A,AR0 STM #10,AR1 LD *AR1,B
TMS320F281XDSP原理及应用技术考试部分答案
第一章 4)C PU 32位定点CPU主频高达150MHz增强型哈佛总线结构支持JTAG仿真接口 2)存储器4MB的程序/数据寻址空间(片外1MB )片上高达128KX16位FLASH存储器 18KX16位单周期访问片内RAM 3)两个事件管理器EVM 每个EVM模块包括:8通道16位PWM死区产生和配置单元外部可屏蔽功率或驱动保护中断正交脉冲编码接口(QEP)三个捕捉单元,捕捉外部时间特别适合于电机控制 4)串行通信外设一个高速同步串行外设接口(SPI)两个UART接口模块(SCI) 增强的CAN2.0B接口模块多通道缓冲串口(McBSP) 5)A DC模块12位,2X8通道(两个S/H), A/D转换周期200ns,输入电压0?3V。 6)其它外设:锁相环(PLL)控制的时钟倍频系数看门狗定时模块 三个外部中断3个32位CPU定时器128位保护密码高达56个通用I/O引脚支持 IDLE,STANDBY ,HALT 等省电模式 F2812和F2810的区别 F2812 有外部存储器接口TMS320F2810 没有TMS320F2812 有128K 的Flash TMS320F2810 仅64K。 5.可达1M的存储器空间可编程的等待状态可编程的读/写选通定时三个独立的片选 思考题TMS320F28X系列中的F2810、F2811、F2812间有何区别? TMS320F2812 有外部存储器接口,而TMS320F2811 和TMS320F2810 没有。TMS320F2812 和TMS320F2811 有128K 的Flash,而TMS320F2810 仅64K。 与单片机相比,DSP有何特点? DSP器件具有较高的集成度。DSP具有更快的CPU,更大容量的存储器,内置有波特率发生器和FIFO缓冲器。提供高速、同步串口和标准异步串口。有的片内集成了A/D和采样/ 保持电路,可提供PWM输出。DSP器件采用改进的哈佛结构,具有独立的程序和数据空间, 允许同时存取程序和数据。内置高速的硬件乘法器,增强的多级流水线,使DSP器件具有 高速的数据运算能力。DSP器件比16位单片机单指令执行时间快8?10倍完成一次乘加运 算快16?30倍。DSP器件还提供了高度专业化的指令集,提高了FFT快速傅里叶变换和滤 波器的运算速度。此外,DSP器件提供JTAG接口,具有更先进的开发手段,批量生产测试 更方便,开发工具可实现全空间透明仿真,不占用用户任何资源。软件配有汇编/链接C编 译器、C源码调试器。 第二章 5不会 7可以通过方向寄存器(GPxDIR )控制引脚为输入或输出;通过量化寄存器(GPxQUAL )设定量化采样周期(QUAL PRD ),消除输入信号中的毛刺干扰。 1、定时器0 (INT1.7 )中断与定时器1中断(INT13 )、定时器2中断(INT14 )相比有何不同? 2、假定SYSCLKOUT = 150MHz,试分析看门狗定时器的定时周期值范围? 3、假定SYSCLKOUT = 150MHz,试分析CPU定时器的定时周期值范围? 第三章 3采用非复用的扩展总线 F2812的XINTF映射到5个独立的存储空间。当访问相应的存储空间时,就会产生一个片选信号。 4 思考题 1如何通过软件判断内部RAM单元或外部RAM芯片是否工作正常?对于FLASH或 EPROM等程序存储器芯片如果诊断? 最简单的办法,对同一个地址写入0~0xFF,然后读出数据,看两者是否相同,再从地址0开始写入有规律的数据,如全0或全1,还有0与1间隔如0x55,0xaa”然后读出看与原数据 是否相同比较常见的故障地址线粘连,数据线粘连,虚焊,存储单元损坏等都可以检测
DSP原理及应用_复习题(精)
一.填空题(本题总分12分,每空1分) 1.累加器A分为三个部分,分别为AG,AH,AL 2.TMS320VC5402型DSP的内部采用 8 条 16 位的多总线结构。 3.TMS320VC5402型DSP采用哈佛总线结构对程序存储器和数据存储器进行控制。 4.TMS329VC5402型DSP有 8 个辅助工作寄存器。 5.DSP处理器TMS320VC5402中DARAM的容量是 16K 字。 6.TI公司的DSP处理器TMS320VC5402PGE100有_____2______个定时器。7.在链接器命令文件中,PAGE 1通常指_数据_______存储空间。 8.C54x的中断系统的中断源分为__硬件_____中断和____软件____中断。1.TI公司DSP处理器的软件开发环境是__ CCS(Code Composer Studio ________________。 2.DSP处理器TMS320VC5402外部有_____20______根地址线。 3.直接寻址中从页指针的位置可以偏移寻址 128 个单元。 4.在链接器命令文件中,PAGE 0通常指_程序_______存储空间。 5.C54x系列DSP处理器中,实现时钟频率倍频或分频的部件是_锁相环PLL ____________。 6.TMS320C54x系列DSP处理器上电复位后,程序从指定存储地址FF80h __单元开始工作。 7.TMS320C54x系列DSP处理器有__2___个通用I/O引脚,分别是__ BIO和XF _______。 8.DSP处理器按数据格式分为两类,分别是__定点DSP和浮点DSP _____9.TMS329VC5402型DSP的ST1寄存器中,INTM位的功能是开放/关闭所有可屏蔽中断。 10.MS320C54X DSP主机接口HPI是__8______位并行口。 1.在C54X系列中,按流水线工作方式,分支转移指令的分为哪两种类型:_无延迟分支转移,延迟分支转移__
DSP原理及应用 李利 第二版课后习题答案
第1章 1.简述DSP芯片的主要特点。 答:哈佛结构;多总线结构;指令系统的流水线操作;专用的硬件乘法器;特殊的DSP指令;快速的指令周期;硬件配置强。 2.请详细描述冯·诺曼依结构和哈佛结构,并比较它们的不同。 答案在P6第一自然段。 3.简述DSP系统的设计过程。 答案依图1-3答之。 4.在进行DSP系统设计时,如何选择合适的DSP芯片? 答:芯片运算速度;芯片硬件资源;运算精度(字长);开发工具;芯片的功耗;其他因素(封装形式、环境要求、供货周期、生命周期等)。 5.TI公司的DSP产品目前有哪三大主流系列?各自应用领域是什么? 答案在P8第二自然段。 第2章 一、填空题
1.TMS320C54x DSP中传送执行指令所需的地址需要用到PAB、CAB、DAB和EAB4条地址总线。P13 2.DSP的基本结构是采用哈佛结构,即程序和数据是分开的。 3.TMS320C54x DSP采用改进的哈佛结构,围绕8条16位总线建立。P13 4.DSP的内部存储器类型可分为随机存取存储器(RAM)和只读存储器(ROM)。其中RAM又可以分为两种类型:双访问RAM,即DARAM和单访问RAM,即SARAM。P24-2.4节 5.TMS320C54xDSP的内部总存储空间为192K字,分成3个可选择的存储空间:64K程序存储器空间、64K数据存储器空间和64KI/O 存储空间。P23-2.4节 6.TMS320C54x DSP具有2个40位的累加器。 7.溢出方式标志位OVM=1,运算溢出。若为正溢出,则ACC中的值为007FFF FFFFH。 8.桶形移位器的移位数有三种表达方式:5位立即数;ST1中5位ASM域;暂存器T的低6位。 9.DSP可以处理双16位或双精度算术运算,当C16=0为双精度运算方式,当C16=1为双16位运算方式。 10.TMS320C54x系列DSP的CPU具有三个16位寄存器来作为CPU状态和控制寄存器,它们是:ST0、ST1和PMST。 11.TMS320C54x:DSP软硬件复位中断号为0,中断向量为00H。 12.TMS320C54x DSP主机接口HPI是8位并行口。引脚
DSP原理及应用考试卷答案
3、若链接器命令文件的MEMORY部分如下所示: MEMORY { PAGE 0: PROG: origin=C00h, length=1000h PAGE 1: DATA: origin=80h, length=200h } 则下面说法不正确的是(A) A、程序存储器配置为4K字大小 B、程序存储器配置为8K字大小 C、数据存储器配置为512字大小 D、数据存储器取名为DATA 6、假定AR3中当前值为200h,AR0中的值为20h,下面说法正确的是() A、在执行指令*AR3+0B后,AR3的值是200h; B、在执行指令*AR3-0B后,AR3的值为23Fh; C、在执行指令*AR3-0B后,AR3的值是180h;
7、下面对一些常用的伪指令说法正确的是:( D ) A、.def所定义的符号,是在当前模块中使用,而在别的模块中定义的符号; B、.ref 所定义的符号,是当前模块中定义,并可在别的模块中使用的符号; C、.sect命令定义的段是未初始化的段; D、.usect命令定义的段是未初始化的段。 8、在采用双操作数的间接寻址方式时,要使用到一些辅助寄存器,在此 种寻址方式下,下面的那些辅助寄存器如果使用到了是非法的( D ) A、AR2 B、AR4 C、AR5 D、AR6 3、假设AR3的当前值为200h,当使用以下TMS320C54XX寻址模式后其 中的值为多少假定AR0的值为20h。 (1)*AR3+0 (2)*AR3-0 (3)*AR3+ (4)*AR3 2.在直接寻址中,指令代码包含了数据存储器地址的低 7 位。当ST1中直接寻址编辑方式位CPL =0 时,与DP相结合形成16位数据存储器地址;当ST1中直接寻址编辑方式位
DSP原理及应用考试卷答案
DSP原理及应用考试卷答案 3、若链接器命令文件的MEMORY部分如下所示: MEMORY { PAGE 0: PROG: origin=C00h, length=1000h PAGE 1: DATA: origin=80h, length=200h } 则下面说法不正确的是(A) A、程序存储器配置为4K字大小 B、程序存储器配置为8K字大小 C、数据存储器配置为512字大小 D、数据存储器取名为DATA 6、假定AR3中当前值为200h,AR0中的值为20h,下面说法正确的是() A、在执行指令*AR3+0B后,AR3的值是200h; B、在执行指令*AR3-0B后,AR3的值为23Fh; C、在执行指令*AR3-0B后,AR3的值是180h; 7、下面对一些常用的伪指令说法正确的是:(D ) A、.def所定义的符号,是在当前模块中使用,而在别的模块中定义的符号; B、.ref 所定义的符号,是当前模块中定义,并可在别的模块中使用的符号; C、.sect命令定义的段是未初始化的段; D、.usect命令定义的段是未初始化的段。 8、在采用双操作数的间接寻址方式时,要使用到一些辅助寄存器,在此种寻址方式下,下面的 那些辅助寄存器如果使用到了是非法的( D ) A、AR2 B、AR4 C、AR5 D、AR6 3、假设AR3的当前值为200h,当使用以下TMS320C54XX寻址模式后其中的值为多少?假定 AR0的值为20h。 (1)*AR3+0 (2)*AR3-0 (3)*AR3+ (4)*AR3 2.在直接寻址中,指令代码包含了数据存储器地址的低7 位。当ST1中直接寻址编辑方式位CPL =0 时,与DP相结合形成16位数据存储器地址;当ST1中直接寻址编辑方式位CPL =1 时,加上SP基地址形成数据存储器地址。 3.TMS320C54有两个通用引脚,BIO和XF,BIO 输入引脚可用于监视外部接口器件的状态;XF 输出引脚可以用于与外部接口器件的握手信号。 4.累加器又叫做目的寄存器,它的作用是存放从ALU或乘法器/加法器单元输出的数据。它的存放格式为Array 5.桶形移位器的移位数有三中表达方式:立即数;ASM ;T低6位 6.DSP可以处理双16位或双精度算术运算,当C16=0 双精度运算方式,当C16=1 为双16位运算方式。 20.ST1的C16= 0 表示ALU工作在双精度算术运算方式。 7.复位电路有三种方式,分别是上电复位;手动复位;软件复位。 8.立即数寻址指令中在数字或符号常数前面加一个# 号,来表示立即数。 9.位倒序寻址方式中,AR0中存放的是FFT点数的一半。 10.一般,COFF目标文件中包含三个缺省的段:.text 段;.data 段和.bss 段。11.汇编源程序中标号可选,若使用标号,则标号必须从第一列开始;程序中可以有注释,注 释在第一列开始时前面需标上星号或分号,但在其它列开始的注释前面只能标分号。
- DSP技术原理及应用
- 《DSP原理及应用》电子教案
- DSP原理及应用_复习题(精)
- DSP原理及应用教学大纲
- DSP控制器原理与应用技术第1章 绪论
- DSP原理及应用考试卷答案
- DSP原理及其应用技术_课程设计_报告
- DSP控制器原理及技术实验报告
- DSP原理及应用第1章到第3章教案(第1次课——第8次课)(最新整理)
- DSP原理及应用_复习题(精)【精】-精心整理
- DSP原理及应用-(修订版)--课后习题答案
- dsp技术原理及应用教程
- DSP原理及应用 李利 第二版课后习题答案
- 14_DSP技术原理及应用教程_课后答案
- DSP原理及应用技术考试知识点总结太原理工大学
- TMS320F281XDSP原理及应用技术考试部分答案
- DSP原理及应用考试卷答案
- DSP原理与应用技术-考试知识点总结
- DSP原理及应用邹彦主编课后答案
- dsp原理及应用 (修订版)邹彦