CAN总线工业测控网络系统的设计与实现

CAN总线工业测控网络系统的设计与实现Ξ
于海生
(青岛大学电气及自动化工程学院 青岛 266071)
摘要 本文采用控制器局部网(CAN)和分散型计算机控制技术,成功地研制了CAN总线工业测控网络系统。该系统由多个主节点和多个从节点组成,且很好地实现了CAN总线工业控制网络的数据通信和现场测控功能。主节点监督和管理所有从节点,从节点测量和控制生产过程参数。
关键词 CAN总线 计算机 控制系统 网络
The D esign and I m plem en ta tion of CAN Bus I ndustr i a l Con trol Network
System
Yu H aisheng
(Q ing d ao U niversity,Q ing d ao 266071,Ch ina)
Abstract CAN bu s indu strial con tro l netw o rk system is successfu lly developed by u sing Con tro ller A rea N et2 w o rk(CAN)and distribu ted com p u ter con tro l techno logy.T he system con sists of m u lti p le m aster nodes and m u lti p le slave nodes.T he functi on s of data comm un icati on and field con tro l are also realized in the system.T he m aster nodes sup ervise and m anage all the slave nodes.T he slave nodes m easu re and con tro l p roducti on p rocess p aram eters.
Key words CAN bu s Com p u ter Con tro l system N etw o rk
1 引 言
现场总线(F ieldbu s)被称为21世纪工业过程控制网络标准,它是连接工业过程现场仪表和控制系统之间的全数字化、双向、多站点的串行通信网络,与控制系统和现场仪表联用组成现场总线控制系统FCS (F ieldbu s Con tro l System)。控制器局部网CAN(Con2 tro ller A rea N etw o rk)属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。由于CAN现场总线有卓越的特性和极高的可靠性,因此越来越受到工业界的重视,并被公认为几种最有前途的现场总线之一,成为一种国际标准(ISO 11898)。
CAN是一个多主总线网络,网络各节点都有权向其它节点发送信息,通信介质可以是双绞线、同轴电缆或光纤,其主要特点是[1]:通信速率 距离为5kbp s 10km~1M bp s 40m,网络节点数可达110个,每个节点均可主动传输,通信介质可以是双绞线、同轴电缆或光纤;采用点对点、全局广播发送接受数据;可实现全分布式多机系统,且无主从机之分,每点均可主动发送报文,可方便地构成多机备份系统;采用非破坏性总线优先级仲裁技术,当两个节点同时向网上发送信息时,优先级低的节点主动停止发送数据;支持4种报文帧即数据帧、远程帧、出错帧、超载帧,采用短帧结构,传送时间短、受干扰概率低;采用CRC校验及其他校验措施,保证了极低的信息出错率;具有自动关闭功能,当节点错误严重时,自动切断与总线的联系,以不影响系统的工作。
CAN总线的应用在我国尚处于起步阶段,一些CAN控制器芯片的应用开发还有待摸索。CAN总线有CAN2.0A和CAN2.0B两种协议,CAN总线用
第22卷第1期 仪 器 仪 表 学 报 2001年2月
Ξ本文于1999年9月收到。
山东省教委科研基金资助项目,资助号:J97B04。
户对独立CAN 控制器82C 200已十分熟悉,由于82C 200只符合CAN 2.0A 协议而使其应用受到一定程度的限制。SJA 1000是理想的新一代独立CAN 控制器,它不仅与82C 200硬件、软件完全兼容,而且实现了增强型CAN 方式,支持CAN 2.0B 协议,因此,本文采用SJA 1000研制CAN 总线工业测控网络系统。
2 CAN 总线工业测控网络的总体方案设计
采用CAN 现场总线和分布式计算机控制技术,实现了多台个人计算机(主节点)和多台CAN 现场总线智能测控装置(从节点)互连,从而研制出一个开放的CAN 现场总线工业测控网络系统,如图1所示
。
图1 CAN 现场总线测控网络系统
主节点(采用I BM PC 微机或其兼容机)通过研制的PC 总线智能CAN 总线网卡与CAN 总线相连,进行信息交换。从节点采用研制的CAN 现场智能测控装置,实现现场测控功能。由此,可方便地构成各种现场测控网络系统,满足用户的需求
。
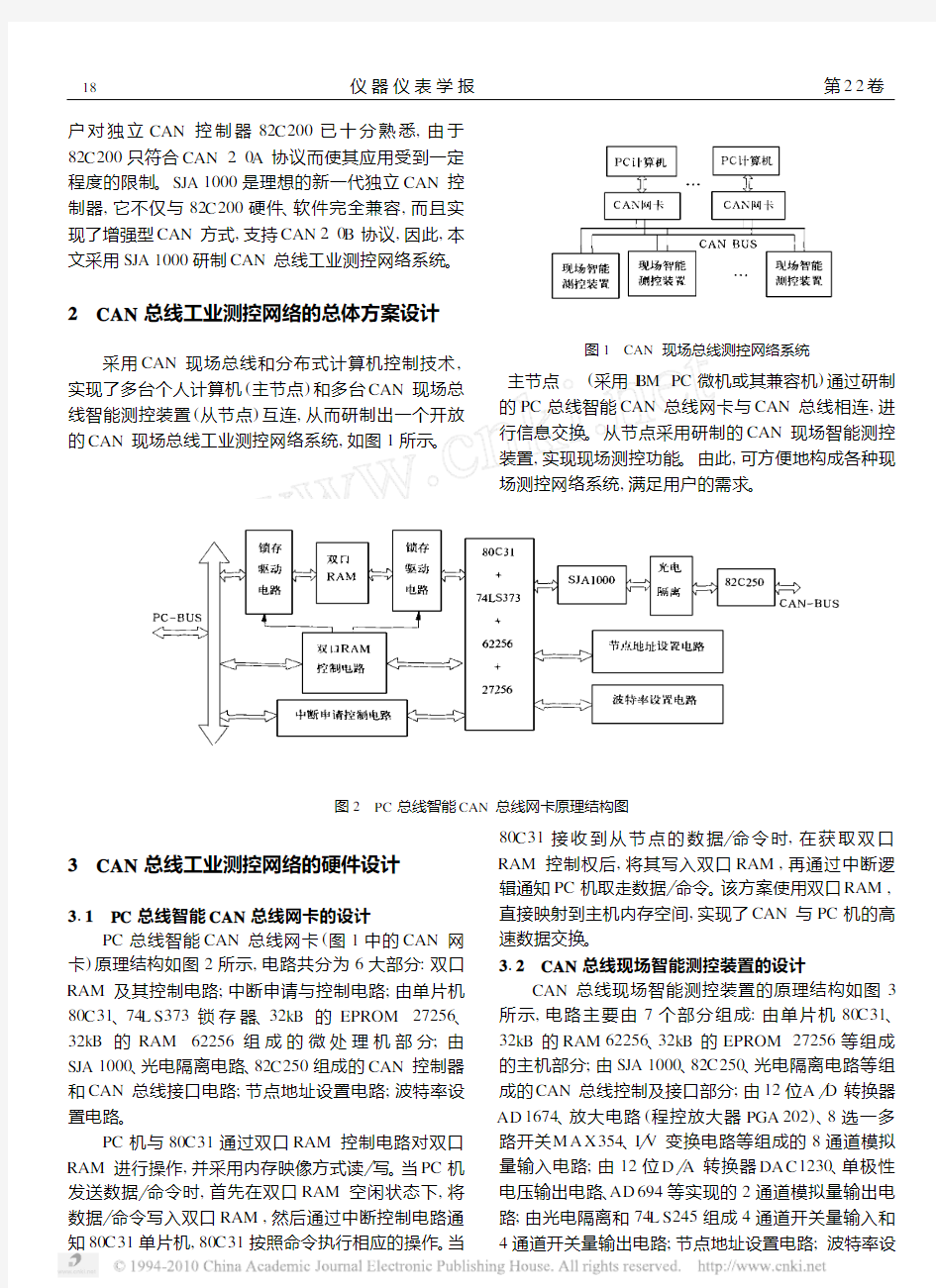
图2 PC 总线智能CAN 总线网卡原理结构图
3 CAN 总线工业测控网络的硬件设计
311 PC 总线智能CAN 总线网卡的设计
PC 总线智能CAN 总线网卡(图1中的CAN 网卡)原理结构如图2所示,电路共分为6大部分:双口RAM 及其控制电路;中断申请与控制电路;由单片机80C 31、74L S 373锁存器、32kB 的EPROM 27256、32kB 的RAM 62256组成的微处理机部分;由
SJA 1000、
光电隔离电路、82C 250组成的CAN 控制器和CAN 总线接口电路;节点地址设置电路;波特率设
置电路。
PC 机与80C 31通过双口RAM 控制电路对双口
RAM 进行操作,并采用内存映像方式读
写。当PC 机发送数据 命令时,首先在双口RAM 空闲状态下,将数据 命令写入双口RAM ,然后通过中断控制电路通知80C 31单片机,80C 31按照命令执行相应的操作。当
80C 31接收到从节点的数据 命令时,在获取双口
RAM 控制权后,将其写入双口RAM ,再通过中断逻
辑通知PC 机取走数据 命令。该方案使用双口RAM ,
直接映射到主机内存空间,实现了CAN 与PC 机的高
速数据交换。
312 CAN 总线现场智能测控装置的设计
CAN 总线现场智能测控装置的原理结构如图3所示,电路主要由7个部分组成:由单片机80C 31、32kB 的RAM 62256、32kB 的EPROM 27256等组成的主机部分;由SJA 1000、82C 250、光电隔离电路等组成的CAN 总线控制及接口部分;由12位A D 转换器
AD 1674、
放大电路(程控放大器PGA 202)、8选一多路开关M A X 354、I V 变换电路等组成的8通道模拟量输入电路;由12位D A 转换器DA C 1230、单极性电压输出电路、AD 694等实现的2通道模拟量输出电路;由光电隔离和74L S 245组成4通道开关量输入和4通道开关量输出电路;节点地址设置电路;波特率设
8
1仪 器 仪 表 学 报第22卷
图3 CAN总线现场智能测控装置原理结构图
置电路。
现场智能测控装置是独立的、智能的CAN总线测控网络节点,既有模拟量输入输出通道、又有开关量输入输出通道,与工业现场的检测和控制仪表连接非常容易,实现工业测控功能非常方便。
4 CAN总线工业测控网络的软件设计
411 CAN总线测控网络用户通信协议的设计根据CAN总线技术规范CAN2.0A、CAN2.0B 和ISO11898标准,本文设计了用户通信协议,CAN 总线测控网络系统的各个节点都按此协议传送信息。用户通信协议的帧结构共10个字节(2个字节标识符、8个字节数据或变量),其定义如图4所示。
76543210
PR I源地址(0~109)
帧类型0每帧字节数(10)
目标地址(0~109)
c m d0
c m d1
物理变量序号
D ata0(L byte)
D ata1
D ata2
D ata3(H byte)
图4 用户通信协议的帧结构示意图
41111 PR I 1为低优先级,0为高优先级,而剩余的优先级由源地址决定,低地址优先级高。
41112 帧类型 100为单帧广播;000为单帧点对点。41113 命令或物理变量名c m d0、c m d1的功能定义有很多,表1仅给出了几种典型的定义。
表1 几种典型的c m d0、c m d1功能定义
c m d0c m d1功能定义
“A”“G”初始化站点
“A”“C”模拟量请求
“A”“I”采集模拟量数据
“A”“O”控制输出模拟量数据
“D”“C”开关量请求
“D”“I”采集开关量
“D”“O”控制输出开关量
“O”“K”响应(初始化成功)
41114 物理变量序号 0~255。
41115 D ata3~D ata0 定义为一个物理变量数据,4字节长整数,原码表示。
412 PC机的软件设计
41211 基于“多主竞争的总线仲裁”通信方式 由于CAN网络中任意一个节点均可作为主节点与其它节点交换数据,因此就有可能出现数个节点同时要发送数据,在这种情况下,则从起始标志后开始总线仲裁。各节点通过“线与”逻辑关系连到CAN总线上,数据位“0”可以覆盖数据位“1”。当某一节点发送的地址段中的某一位为“1”,而其他节点发送的相应位为“0”时,发送“1”的节点便失去仲裁,退出竞争而转为接收状态。
41212 基于“命令+参数”的通信方式 PC机与智能CAN网卡的联络采用一套基于“命令+参数”的通信方式实现[2]。根据此通信方式,笔者已开发出在DO S、W indow s3.X、W indow s95平台上的用户接口驱动程序,满足了用户要求,用户可以用C、C++、V C++等语言和驱动程序接口。下面以笔者开发的W indow s95驱动软件为例,说明PC机对智能CAN总线网卡的操作和使用方法。W indow s95驱动软件为W I N32CAN. DLL,原型说明文件为W I N32CAN.H,输入库为
91
第1期CAN总线工业测控网络系统的设计与实现
W I N32CAN.L I B。W I N32CAN.L I B包含15个函数,这里仅就其中几个典型的函数加以说明。
(1)打开智能CAN总线网卡in t CAN Open(vo id)
输入参数:无。
输出参数:1为成功,0为打不开。
(2)初始化智能CAN总线网卡in t CAN In it(B YT E m ode,B YT E address,un signed baudrate)
输入参数:m ode为通信模式(’N’,’M’,’S’),N 表示不分主从节点,M表示本节点为主节点,S表示本节点为从节点;address为本节点地址(0~109);bau2 drate为波特率选择因子0~8(5k~1M bp s)。
输出参数:1为成功,0为失败。
(3)发送数据in t CAN PT ran s(B YT E destinati on, un signed num ber,B YT E far3data)
输入参数:destinati on为发送目标地址(S模式不需要);num ber为发送内容字节数;data为发送内容缓冲区指针。
输出参数:1为成功,0为网卡不空闲。
(4)接收数据in t CAN R ece(B YT E far3dtyp e,
B YT E far3address,B YT E far3data)
输入参数:dtyp e为接收数据类型指针(M模式类型无意义);address为源(发送)节点地址指针(S模式地址无意义);data为接收内容缓冲区指针。
输出参数:接收数据包字节数,0xff00为无数据包收到,0xffff为数据包错;3dtyp e为1为广播数据, 0为点到点数据。
(5)关闭智能CAN总线网卡vo id CAN C lo se (vo id)。
除了以上几个函数之外,还有广播数据、优先发送数据、优先广播数据、查询中断源、查询发送状态、查询有无数据、查询网卡状态、复位网卡等多个函数,可共选用。
41213 PC机发送和接收程序设计 根据前面定义的函数,用户可方便地用C、C++、V C++等语言设计PC机发送和接收等驱动程序。设计步骤是:首先用CAN Open(vo id)函数打开智能CAN总线网卡,然后用CAN In it(B YT E m ode,B YT E address,un2 signed baudrate)函数初始化智能CAN总线网卡,再用CAN PT ran s(B YT E destinati on,un signed num ber,B YT E far3data)和CAN R ece(B YT E far 3dtyp e,B YT E far3address,B YT E far3data)函数设计发送数据和接收数据程序,最后用CAN
C lo se(vo id)函数关闭智能CAN总线网卡。除此之外,用户还可选用所定义的其它函数进行程序设计,这里不再赘述。
413 CAN现场智能测控装置软件设计
CAN现场智能测控装置作为CAN总线测控网络的从节点,主要完成两项任务:一是当PC机请求数据时,将从节点采集的数据和状态等信息传送给PC 机;二是执行测量输入与控制输出任务。测量输入与控制输出在主程序中完成,接收控制参数和发送一帧数据等通信功能在中断服务程序中完成。用户既可选用笔者提供的应用程序,又可采用C51、PL M51、A S M51、A51等自行开发应用程序。
41311 现场测控装置的主程序设计 现场测控装置的主程序(M A I N)采用A S M51汇编语言编写,其主要程序结构和内容如下:
M A I N:L CALL I N IT I AL
LOO P:L CALL A IS
L CALL D IS
L CALL D PS
L CALL CON TROL S
L CALL AO S
L CALL DO S
SJM P LOO P
子程序I N IT I AL、A IS、D IS、D PS、CON TROL S、AO S、DO S分别执行初始化、模拟量输入、数字量输入、数据处理(数字滤波、标度变换)、控制、模拟量输出、数字量输出操作。
41312 中断服务程序设计 现场测控装置的中断服务程序主要实现接收数据中断、接收任务分析和发送数据任务。当主节点(PC机)向从节点(现场测控装置)发送请求数据命令时,从节点即产生接收数据中断。进入中断服务程序后首先保护现场,然后CPU读出接收缓冲区的命令内容并进行任务分析,根据任务分析的结果确定数据发送任务,并向主节点发送数据,最后恢复现场、中断返回。
5 系统应用及结论
本课题研制的CAN总线工业测控网络系统,经过实验测试,达到了设计要求并通过了省级技术鉴定。该系统在化纤厂浆粕生产过程的自动控制系统中得到了应用[3],成功地实现了浆粕生产过程粘胶蒸煮工艺的现场总线控制,收到了很好的效果。
本文采用CAN总线技术和分散型测控网络技术,成功地研制出CAN总线工业测控网络,改变了传
(下转第31页)
02仪 器 仪 表 学 报第22卷
1}。要测P1中所有的s2a21故障,测试集为{(a,b,c,) ?ba?c=1}。
在这个例子中,将临界性从扇出支路向扇出源推进时,硬性地将路径以外的扇出支路的影响消除(赋值条件C=1),这使因为在已知某个或某些扇出支路临界时,判断扇出源的临界性较复杂[4]。若此问题得到解决,可以减少敏化条件,增加反向路径敏化成功的几率,在此不多讨论。
C ITA算法嵌入SA T2A T PG中,减少了CN F的构成时间和搜索空间,如图1中,不需要构造d,f,h点故障的故障诊断式ΥD=ΥFS∪ΥG∪ΥR。实际上,C ITA 算法可以利用故障效果单通路有向传播方法的信息,从故障表中首先处理目标故障是源输入的节点故障,如果单通路有向传播方法处理源输入的节点故障的敏化路径数为1,那么这条敏化路径就是一条从源输入到源输出的临界路径。然而C ITA算法是一种单路控制法,并不是一种完全的算法,所以C ITA算法结束后,剩余故障采用SA T2A T PG测试生成方法。
6 实验结果
表3 标准电路仿真结果
电路名#F#D#R#A SA T2
A T PG
时间
C ITA2
CN F
时间
C432524520401591410718
C4997587508098148317
C880942942002631128718
C190818791870903241323718
C26702747263011703211722616
为了验证该种测试算法,观察ISCA S’85基准电路的仿真实验结果。SA T2A T PG在内存为32M的586 166上运行,运行结果见表3。表中表示每个故障的平均CPU时间以毫秒记。#F,#D,#R和#A分别表示故障总数,诊断数,冗余数和不可诊断数。可得出结论,SA T2A T PG能够诊断ISCA S’85电路的全部故障(要么得到测试向量,要么证明该故障是冗余故障)。另外,大部分CPU时间是生成CN F式。而C ITA 嵌入SA T2A T PG中,ISCA S’85基准电路的故障诊断时间减少、简化了搜索空间和加速测试生成。
7 结束语
本文描述了基于SA T的A T PG算法,SA T2 A T PG成功诊断所有的故障不需太多的启发式知识,经ISCA S’85标准电路的实验结果证实,与现有的A T PG算法比较,可满足性算法有效。然而,算法有较大的缺点,此算法的大部分CPU时间是生成CN F式。本文提出控制输入跟踪算法C ITA嵌入SA T2A T PG 中,减少了CN F的构成时间和算法的搜索空间,而且减轻故障压缩的工作量,又不损失测试集的精简。
参考文献
1 T.L arrabee.T est Pattern Generati on using Boo lean Satis2 fiability.IEEE T ran.CAD.,1992,11(1):4~15.
2 Irith Pom eranz,L ak shm i N.R eddy,Sudhakar M.R eddy.
COM PA CT EST:A M ethod to Generati on Compact T est Sets fo r Com binati onal C ircuits.IEEE T ran.CAD., 1993,12(7):1040~1048.
3 P.M.Silva,K.A.Sakallah.Robust A lgo rithm s fo r T est Pattern Generati on.P roc.FTC,1997:152~161.
4 魏道政.一种数字电路故障模拟方法——临界路径跟踪法的改进.计算机辅助设计与图形学学报,1989,1(1):38~
44.
(上接第20页)
统的计算机控制系统结构,真正地实现了在生产现场的全分散控制,节约了大量的信号电缆,增加了系统的可靠性;采用CAN总线技术,实现了多主多从的结构,解决了R S-485总线、B ITBU S(位总线)等无法解决的问题;CAN总线网络中的节点可分为优先级,这对于有实时要求的用户无疑是一个福音;在主节点中,本文开发了DO S、W indow s3.x、W indow s95平台上的用户驱动程序;在从节点中,开发了用户测控软件与CAN的接口,方便了用户的使用。 参考文献
1 于海生,等编著.微型计算机控制技术.北京:清华大学出版社,1999.
2 邬宽明编著.CAN总线原理和应用系统设计.北京:北京航空航天大学出版社,1996.
3 于培仁,于海生,阎学为.浆粕生产过程现场总线控制系统.
青岛大学学报,工程技术版.1998,13(3):41~44.
13
第1期数字电路测试生成的可满足性方法研究
基于STC89C51的CAN总线点对点通信模块设计
基于STC89C51的CAN总线点对点通信模块设计 [导读]随着人们对总线对总线各方面要求的不断提高,总线上的系统数量越来越多,继而出现电路的复杂性提高、可靠性下降、成本增加等问题。为解决上述问题,文中阐述了基于SJAl000的CAN总线通信模块的实现方法,该方法以PCA82C250作为通信模块的总线收发器,以SITA-l000作为网络控制器。并以STCSTC89C5l单片机来完成基于STC89C5l的CAN通信硬件设计。文章还就平台的初始化、模块的发送和接收进行了设计和分析。通过测试分析证明,该系统可以达到CAN的通信要求,整个系统具有较高的实用性。 0 引言 现场总线是应用在生产最底层的一种总线型拓扑网络,是可用做现场控制系统直接与所有受控设备节点串行相连的通信网络。在工业自动化方面,其控制的现场范围可以从一台家电设备到一个车间、一个工厂。一般情况下,受控设备和网络所处的环境可能很特殊,对信号的干扰往往也是多方面的。但要求控制则必须实时性很强,这就决定了现场总线有别于一般的网络特点。此外,由于现场总线的设备通常是标准化和功能模块化,因而还具有设计简单、易于重构等特点。 1 CAN总线概述 CAN (Controller Area Network)即控制器局域网络,最初是由德国Bosch公司为汽车检测和控制系统而设计的。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。其良好的性能及独特的设计,使CAN总线越来越受到人们的重视。由于CAN总线本身的特点,其应用范围目前已不再局限于汽车行业,而向自动控制、航空航天、航海、过程工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械及传感器等领域发展。目前,CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。它的直线通信距离最大可以达到l Mbps/30m.其它的节点数目取决于总线驱动电路,目前可以达到110个。 2 CAN系统硬件设计 图1所示是基于CAN2.0B协议的CAN系统硬件框图,该系统包括电源模块、MCU部分、CAN控制器、光电耦合器、CAN收发器和RS232接口。硬件系统MCU采用STC89C5l,CAN控制器采用SJAl000,CAN收发器采用PCA82C250,光耦隔离采用6N137。
CAN总线设计
微机应用课程设计报告 ` 题目:基于单片机的16*16点阵系统设计 专业: … 班级: 姓名: 学号: 地点: 时间: 指导老师:
~
摘要 现场总线是自动化领域的计算机网络,是当今自动化领域技术发展的热点之一。它以总线为纽带,将现场设备连接起来成为一个能够相互交换信息的控制网络,是一种双向串行多节点数字通信的系统。CAN总线也是现场总线的一种,它最初被应用于汽车的控制系统中,由于其卓越的性能,CAN总线的应用范围已不再局限于汽车工业中,而被广泛的用到自动控制、楼宇自动化、医疗设备等各个领域。 本文主要介绍一种基于CAN总线的控制系统,通过对这一系统的制作流程来说明CAN总线的简单应用,文章主要是对本控制系统的三个硬件模块进行介绍及模块中相关芯片的应用,同时本文也对软件的编写进行了说明。 关键字:现场总线; CAN总线;单片机;控制系统
目录 1 绪论 (1) CAN总线的简单介绍 (1) CAN总线的优势 (1) 网络各节点之间的数据通信实时性强 (2) 缩短了开发周期 (2) 已形成国际标准的现场总线 (2) 最有前途的现场总线之一 (2) 2 硬件电路设计 (3) 单片机模块 (3) STC89C52主要特性如下: (4) STC89C52RC单片机的工作模式 (5) CAN总线控制器模块 (6) SJA1000简介 (6) PCA82C250简介 (9) 通信模块和外围接口 (11) 通信模块 (11) 外围接口 (12) 3 CAN总线控制系统软件设计 (13) 初始化程序 (13) 数据的接收和发送功能 (15) 发送数据 (15) 接收数据 (17) 4 总结 (19) 参考文献 (20) 附录一 (21)
CAN总线网络设计
1 引言 can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。由于can总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。 can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。 2 系统总体方案设计 整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。 网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。本设计can总线传输介质采用双绞线。 图 1 can总线网络系统结构 3 can总线智能网络节点硬件设计 本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。该智能节点的电路原理图如图2所示。该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步
课程设计--CAN总线
课程设计 题目 CAN通信 二级学院电子信息与自动化 专业自动化 班级 107070103 学生姓名学号 指导教师熊文 考核项目 设计50分平时 成绩 20分 答辩30分 设计质量 20分 创新设计 15分 报告质量 15分 熟练程度 20分 个人素质 10分 得分 总分考核等级教师签名
摘要: CAN总线是控制器局域网总线(contr01ler AreaNetwork)的简称。属于现场总线的范畴,是一种有效支持分布式控制或实时控制的串行通信网络。由于其高性能、高可靠性及独立的设计而被广泛应用于工业现场控制系统中。SJAl000是一个独立的CAN控制器,PCA82C200的硬件和软件都兼容,具有一系列先进的性能,特别在系统优化、诊断和维护方面,因此,SJAl000将会替代PCA82C200。SJAl000支持直接连接到两个著名的微型控制器系列80C51和68xx。下面以单片机AT89C52和SJAl000为例,介绍CAN总线模块的硬件设计和CAN通信软件的基本设计方法。 关键词:AT89S52 CAN通信 SJA1000
目录: (一) 背景: (二) CAN介绍 (三) SJA1000内部结构和功能简介 (四) 硬件电路图 (五) 初始化程序 (六) 测试 (七) 总结
一背景: CAN(Controller Area Network)数据总线是一种极适于汽车环境的汽车局域网。CAN总线是德国Bosch公司为解决汽车监控系统中的 复杂技术难题而设计的数字信号通信协议,它属于总线式串行通信网 络。由于采用了许多新技术和独特的设计思想,与同类车载网络相比,CAN总线在数据传输方面具有可靠、实时和灵活的优点。 1991年9月Philips半导体公司制定并发布了CAN技术规范(版本 2.0),该技术规范包括A部分和B两部分,其中2.0A给出了CAN报文的标 准格式;2.0B给出了标准和扩展两种格式。此后,1993年11月ISO正 式颁布了道路交通运输工具一数据信息交换一高速通信控制器局域 网(CAN)的国际标准IS011898,为控制器局域网的标准化和规范化铺 平了道路。 二CAN介绍 CAN通信的特点: (1) CAN是到目前为止唯一具有国际标准且成本较低的现场总线; (2) CAN废除了传统总线的站地址编码,对通信数据块进行编码,为 多主方式工作,不分主从,通信方式灵活,通过报文标识符通信,可 使不同的节点同时接收到相同的数据,无需站地址等节点信息。 (3) CAN采用非破坏性总线仲裁技术,当多个节点同时向总线发送信 息时,优先级较低的节点会主动地退出发送,而最高优先级的节点可 不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。尤其 是在网络负载很重的情况下也不会出现网络瘫痪情况(以太网则有可
CAN总线设计(最终版)(1)
CAN-USB适配器设计 ***** 指导老师:*** 学院名称:***** 专业班级:**** 设计提交日期:**年**月 摘要 随着现场总线技术和计算机外设接口技术的发展,现场总线与计算机快速有效的连接又有了更多的方案。USB作为一种新型的接口技术,以其简单易用、速度快等特点而备受青睐。本文介绍了一种基于新型USB接口芯片CH372的CAN总线网络适配器系统的设计,提出了一种使用USB接口实现CAN总线网络与计算机连接
的方案。利用芯片CH372可在不了解任何USB协议或固件程序甚至驱动程序的情况下,轻松地将并口或串口产品升级到USB接口。该系统在工业现场较之以往的系统,可以更加灵活,高速,高效地完成大量数据交换,并可应用于多种控制系统之中,具有很大的应用价值。 关键词:USB;CH372;CAN;SJA100;适配器 目录 1.设计思想 (3) 2.CAN总线与USB的转换概述 (4) 3. 适配器硬件接口设计 (5) 3.1 USB接口电路 (5)
3.2 CAN总线接口电路 (7) 4.USB通用设备接口芯片CH372 (8) 4.1 概述 (8) 4.2 引脚功能说明 (9) 4.3 内部结构 (9) 4.4 命令 (10) 5.软件设计 (10) 5.1 概述 (10) 5.2主监控程序设计 (12) 5.3 CAN和USB接口芯片的初始化 (13) 5.4 CAN报文的发送 (15) 5.5 CAN报文的接收 (17) 5.6.自检过程 (19) 5.7 USB下传子程序设计 (20) 5.8 USB上传子程序设计 (22) 5.9.USB—CAN转换器计算机端软件设计 (23) 6. 抗干扰措施 (25) 7. 估算成本 (26) 8. 应用实例介绍 (27) 9 总结及设计心得 (28) 10 参考文献 (28) 1 设计思想 现场总线网络技术的实现需要与计算机相结合。目前,在微机上扩展CAN总线接口设备一般采用PCI总线或者RS-232总线。PCI虽然仍是高速外设与计算机接口的主要渠道,但其主要缺点是占用有限的系统资源、扩展槽地址;中断资源有限;并且插拔不方便;价格较贵;而且设计复杂、需有高质量的驱动程序保证系统的稳定;且无法用于便携式计算机的扩
CAN总线系统设计中的几个问题
CAN总线系统设计中的几个问题 北京航空航天大学管理学院(100083) 邬宽明 摘 要:论述了CAN总线系统设计中系统时钟和位时间的选定、CAN中断服务程序编制以及较长报文拼接等问题。 关键词:CAN总线设计 系统时钟 位时间 中断服务 报文拼接 CAN总线是德国Bo sch公司在80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信总线,它是一种多主总线系统,通信介质可以是双绞线、同轴电缆或光导纤维。通信速率可达1M bp s。CAN总线通信控制器中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括零位的插入 删除、数据块编码、循环冗余检验、优先级判别等项工作。CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点是可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位(按CAN技术规范210A)或29位(按CAN 技术规范210B)二进制数组成,因此可以定义211或229个不同的数据块。这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。CAN的这些卓越特性,极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界重视,并已被公认为最有前途的现场总线之一。1993年11月ISO正式颁布了道路交通运载工具—数字信息交换—高速通信控制器局部网(CAN)国际标准(ISO11898)。为控制器局部网标准化、规范化推广铺平了道路。可以预料,控制器局部网在我国迅速发展和普及是指日可待的。 本文分别论述CAN总线系统设计中经常遇到的系统时钟和位时间如何选定、CAN中断服务程序如何安排以及较长报文如何拼接等几个问题。 1 系统时钟和位时间的选定 在CAN控制器中提供两个总线定时寄存器,其中总线定时寄存器0(BR T0)可决定波特率予分频(BR P)和同步跳转宽度(SJW)的数值,其低六位(D5~D0)用来确定系统时钟,而其高二位(D7,D6)用来确定同步跳转宽度(SJW)。总线定时寄存器1(BR T1)可决定位周期宽度、采样点位置和在每个采样点进行采样的次数,其D3~D0用于T SEG1,而D6~D4用于T SEG2并按下式计算: t TSEG1=t SCL(8T SEG1.3+4T SEG1.2+2T SEG1.1 +T SEG1.0+1) t TSEG2=t SCL(4T SEG2.2+2T SEG2.1+T SEG2.0+1) 图1 每位时间和采样点位置T SEG1和T SEG2可 确定每位的时钟周期数目 和采样点位置,如图1所 示 若P8XC592复位请求 位被置为高,这两个寄存器 均可被访问(读 写)。系统时 钟t SCL可使用下列等式计算: t SCL=2t CL K(32BR P.5+16BR P.4+8BR P.3+4BR P.2 +2BR P.1+BR P.0+1) 其中:t CL K为P8XC592振荡器的时钟周期 实例:设晶体振荡器频率为16M H Z,BTR0=00H, BTR1=14H,计算系统时钟和位时间 由给定BTR0和BR T1值可知: BR P.5,BR P.4,BR P.3,BR P.2,BR P.1和BR P10均为0,另外,除T SEG112和T SEG210为1外,其余系数均为01因此有, t SCL=2t CL K(32×0+16×0+8×0+4×0+2×0 +0+1)=2t CL K t TSEG1=t SCL(8×0+4×0+2×0+1)=5t SCL t TSEG2=t SCL(4×0+2×0+1×0+1)=2t SCL t b=(1+5+2)t SCL=2×8×t CL K=1M bp s 此时同步跳转宽度(SJW)为 t SJW=t SCL(2SJW.1+SJW.01+1)=t SCL即1 8(Λs)实例2:设晶体振荡器频率为16M H z,BTR0= 7FH,BTR1=7FH,计算系统时钟和位时间 由给定BR T0和BR T1值可知: BR P15,BR P14,BR P13,BR P12,BR P11,和BR P10,均为1,另外,T SEG11X和T SEG21X亦均为 81四通电脑应用美国德州工控机6257723062577231 《电子技术应用》1998年第9期
CAN总线系统智能节点设计
https://www.wendangku.net/doc/99819398.html, CAN总线系统智能节点设计 作者:邹继军饶运涛 信息工程系 华东地质学院 摘要:CAN总线上的节点是网络上的信息接收和发送站;智能节点能通过编程设置工作方式、ID地址、波特率等参数。它主要由单片机和可编程的CAN通信控制器组成。本文介绍这类节点的硬件设计和软件设计;其中软件设计包括SJA1000的初始化、发送和接收等应用中的最基本的模块子程序。 关键词:总线节点CAN 控制器 引言: CAN (Controller Area Network)总线,又称控制器局域网,是Bosch公司在现代汽车技术中领先推出的一种多主机局部网,由于其卓越的性能、极高的可靠性、独特灵活的设计和低廉的价格,现已广泛应用于工业现场控制、智能大厦、小区安防、交通工具、医疗仪器、环境监控等众多领域。CAN已被公认为几种最有前途的现场总线之一。CAN总线规范已被ISO国际标准组织制订为国际标准,CAN 协议也是建立在国际标准组织的开放系统互连参考模型基础上的,主要工作在数据链路层和物理层。用户可在其基础上开发适合系统实际需要的应用层通信协议,但由于CAN总线极高的可靠性,从而使应用层通信协议得以大大简化。 CAN总线与其他几种现场总线比较而言,是最容易实现、价格最为低廉的一种,但其性能并不比其他现场总线差。这也是目前CAN总线在众多领域被广泛采用的原因。节点是网络上信息的接收和发送站,所谓智能节点是由微处理器和可编程的CAN控制芯片组成,它们有两者合二为一的,如芯片P8XC592,也有如本文介绍的,独立的通信控制芯片与单片机接口,后者的优点是比较灵活。当然,也
基于STM32F407的双CAN总线设计与实现
基于STM32F407的双CAN总线设计与实现 【摘要】本文是基于意法半导体(ST)新推出的一款高性能CortexTM-M4内核的ARM 芯片STM32F407ZGT6,进行的双CAN总线设计。在开发过程中采用了ST提供的可视化图形界面开发工具STM32Cube进行底层驱动的配置,简化了设计工作。但由于该工具链接的固件库函数存在传递参数错误,使得CAN总线无法接收数据,本文对该库函数进行了更正。 【关键词】STM32F407;CAN;STM32Cube Design and Realization of Double CAN Buses on STM32F407 LIU Peng (Chinese Electron Scientific and Technological Company 20th Institute,Xi’an Shaanxi 710068,China) 【Abstract】Based on a high-performance ARM with CortexTM-M4 core which launched by STMicroelectronics (ST)--STM32F407ZGT6,the double CAN bus is designed in this paper. A visual graphical interface-STM32cube which is provided by ST,is used to configure the underlying driver in this development process. It simplifies the design work. However,
CAN总线硬件设计
EDN-CAN总线助学【之八】-CAN总线硬件设计 这一讲我们详细介绍一下CAN总线通讯模块的硬件设计:CAN总线学习板上C AN通讯模块的设计。包括三个部分:(1)与CPU的接口;(2)CAN控制器SJA1000与驱动器82C250接口及其他外围电路;(3)82C250外围电路。 电路如下: 1 SJA1000与CPU接口 我们在学习单片机原理的时候,我相信大家都学习过RAM,ROM,I/O口扩展。大家可以把SJA1000看作一个外部的RAM,扩展电路十分简单。SJA1000支持两种模式单片机的连接,我们选用的是8051系列的单片机,所以选择的是I ntel模式。 (1)SJA1000的数据线和地址线是共用的,STC89C52的数据线和地址线也是共用的,这就更加方便了,直接连接就OK了。 (2)既然数据线和地址线共用,必须区分某一时刻,AD线上传输的是地址还是数据,所以就需要连接地址锁存信号 ALE。 (3)随便使用一个单片机管脚作为SJA1000的片选信号,我们学习板使用的是P20。当然你也可以直接接地。
(4)读写信号直接和单片机连接就行了,就不必多说了! (5)我们采用单片机的IO口线控制SJA1000的RST管脚,是为了软件可以实现硬复位SJA1000芯片。 (6)SJA1000的中断管脚连接单片机的INT1外部中断。当收到一包数据后,通知CPU。 2 SJA1000与82C250的接口及其他外围电路 (1)SJA1000有两路发送和接收管脚,CAN总线学习板使用了第0路。与82 C250的连接比较简单,直接连接就可以了。但应该数据发送和接收管脚不要接反了。而且我们增加了通讯状态指示灯,便于调试。 (2)时钟电路:SJA1000的最高时钟可达24M,我们学习板使用的是16M的晶振。另外增加了一个启动电阻R9(10M欧姆)。 (3) 3 82C250外围电路 (1)CANH和CANL管脚增加阻容电路,滤除总线上的干扰,提高系统稳定性。(2)RS管脚为斜率电阻输入。通过这个管脚来选择82C250的工作模式:高速模式(应用与对数据传输速率高的情况,通讯数据线最好是屏蔽的);斜率模式(速度较低,通讯线可以是普通的双绞线)。准备模式(应用于对功耗要求比较高的场合)。我们的学习板采用的是斜率模式,方便大家学习。 (3)J3是外部总线的连接口。 (4)J4是终端电阻的选择端。 到现在为止,CAN总线学习的硬件部分就介绍完了,请等待下面的软件试验部分!
基于ARM7处理器的CAN总线网络设计
基于ARM7处理器的CAN总线网络设计 1 引言 can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。由于can 总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。 can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。 2 系统总体方案设计 整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。 网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。本设计can总线传输介质采用双绞线。 图 1 can总线网络系统结构 3 can总线智能网络节点硬件设计 本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。该智能节点的电路原理图如图2所示。该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。
汽车can总线设计
湖南机电职业技术学院 《汽车单片机应用技术》实训报告 题目汽车CAN总线系统智能节点的设计 院系汽车工程系 专业汽车电子1004 学生姓名向杰 指导教师冉成科 完成日期 2012年3月23日
目录 概述 (3) 实训要求 (4) 第一章汽车车载网络系统的组成和原理 (4) 1.1汽车网络技术概述 (4) 1.2 汽车网络技术的作用 (4) 第二章 CAN总线 (4) 2.1 CAN简介 (5) 2.2汽车CAN总线网络系统结构图 (6) 第三章CAN总线的维修与检修 (7) 3.1 故障类型及检测诊断方法 (7) 第四章 CAN总线在汽车领域的应用 (8) 4.1摘要 (8) 4.2 CAN总线技术的应用 (8) 4.3汽车CAN总线节点ECU的硬件设计 (8) 4.4CAN总线在国内自主品牌汽车中的应用 (9) 第五章实训心得 (10)
概述 随着现代汽车中所使用的电子表之间、系统和汽车故障诊断系统之间均需要进行数据交换,如使用普通的线索完成这些数据之间的交换,线索总长可能超过1600m,实现起来是相当困难的。为解决这一问题控制系统和通讯系统越来越多,如发动机电控系统、自动变速器控制系统、防抱死制动系统(ABS)、自动巡航系统(ACC)和车载多媒体系统等,这些系统之间、系统与显示仪,德国的博世(Bosch)公司及几个半导体生产商开发出一种新型的车用控制器——CAN。 CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO 国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。 现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持,所以它在汽车领域中运用只会越来越广泛越来越重要。我们作为汽车电子的学习者有必要学好这方面的技术,这样才能顺应汽车高智能化的特点。为自己提升技能。
CAN总线接口电路设计注意事项(精)
CAN总线接口电路设计注意事项收藏 CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域得到了广泛的应用。为提高系统的驱动能力,增大通信距离,实际应用中多采用Philips公司的82C250作为CAN控制器与物理总线间的接口,即CAN收发器,以增强对总线的差动发送能力和对CAN控制器的差动接收能力。为进一步增强抗干扰能力,往往在CAN 控制器与收发器之间设置光电隔离电路。典型的CAN总线接口电路原理如图1所示。 图1 典型的CAN总线接口电路原理图 1 接口电路设计中的关键问题 1.1 光电隔离电路 光电隔离电路虽然能增强系统的抗干扰能力,但也会增加CAN总线有效回路信号的传输延迟时间,导致通信速率或距离减少。 82C250等型号的CAN收发器本身具备瞬间抗干扰、降低射频干扰(RFI以及实现热防护的能力,其具有的电流限制电路还提供了对总线的进一步保护功能。因此,如果现场传输距离近、电磁干扰小,可以不采用光电隔离,以使系统达到最大的通信速率或距离,并且可以简化接口电路。如果现场环境需要光电隔离,应选用高速光电隔离器件,以减少CAN总线有效回路信号的传输延迟时间,如高速光电耦合器 6N137,传输延迟时间短,典型值仅为48 ns,已接近TTL电路传输延迟时间的水平。
1.2 电源隔离 光电隔离器件两侧所用电源Vdd与Vcc必须完全隔离,否则,光电隔离将失去应有的作用。电源的隔离可通过小功率DC/DC电源隔离模块实现,如外形尺寸为DIP-14标准脚位的5 V 双路隔离输出的小功率DC/DC模块。 1.3 上拉电阻 图1中的CAN收发器82C250的发送数据输入端TXD与光电耦合器6N137的输出端OUT相连,注意TXD必须同时接上拉电阻R3。一方面,R3保证6N137中的光敏三极管导通时输出低电平,截止时输出高电平;另一方面,这也是CAN 总线的要求。具体而言, 82C250的TXD端的状态决定着高、低电平CAN 电压输入/输出端CANH、CANL的状态(见表1。CAN总线规定,总线在空闲期间应呈隐性,即CAN 网络中节点的缺省状态是隐性,这要求82C25O的TXD端的缺省状态为逻辑1(高电平。为此,必须通过R3确保在不发送数据或出现异常情况时,TXD端的状态为逻辑1(高电平。 表1 TXD与CANH、CANL的关系表 TXD CANH电CANL电CAN总 状态平(V 平(V 线状态 1 2.5 2.5 隐性(逻辑1 0 3.5 1.5 显性(逻辑0 1.4 总线阻抗匹配 CAN总线的末端必须连接2个120Ω的电阻,它们对总线阻抗匹配有着重要的作用,不可省略。否则,将大大降低总线数据通信时的可靠性和抗干扰性,甚至有可能导致无法通信。
can节点设计
课程设计 课程名称车载总线题目名称 学生学院 专业班级 学号 学生姓名 指导教师 20 年月日
摘要:通过iCAN协议,设计单片机对SJA1000连接,进行控制收发器TJA1050的收发,通过iCAN-4050数字I/O产品进行流水灯输出试验。 关键词:CAN总线、SJAl000、TJA1050、AT89C52 1 引言 CAN(Controller Area Network)是控制器局域网,主要用于各种设备检测及控制的现场总线。CAN总线是德国BOSCH公司20世纪80年代初为解决汽车中众多控制与测试仪器间的数据交换而开发的串行数据通信协议。这是一种多主总线,无论是在高速网络还是在低成本的节点系统,应用都很广泛。由于采用了许多新技术及独特的设计,与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性,其主要特点如下: ●通信方式灵活,可以多主方式工作,网络上任意一个节点均可以在任意时刻主动向网络上的其他节点发送信息,不分主从。 ●CAN节点只需对报文的标识符滤波即可实现点对点、点对多点及全局广播方式发送和接收数据,其节点可分成不同的优先级,节点的优先级可通过报文标识符进行设置,优先级高的数据最多可在134μs内传输,可以满足不同的实时要求。 ●CAN总线通信格式采用短帧格式,每帧字节数量多为8个字节,可满足一般工业领域中控制命令、工作状态及测试数据的要求,同时,8个字节不会占用总线时间过长,保证了通信的实时性。 ●采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息出现冲突时,优先级低的节点会主动退出数据发送,而优先级高的节点可不受影响地继续传输数据,大大节省了总线冲突仲裁时间,在网络重载的情况下也不会出现网络瘫痪。 ●直接通信距离最大可达10 km (速率在5 kb/s以下),最高通信速率可达1 Mb/s (此时距离最长为40 m);节点数可达110个,通信介质可以是双绞线、同轴电缆或光导纤维。 ●CAN总线采用CRC检验并可提供相应的错误处理功能,保证数据通信的可靠性,其节点在错误严重的情况下具有自动关闭输出功能,使总线上其他节点的操作不受影响。
CAN总线接口电路设计注意事项
CAN总线接口电路设计注意事项 CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域得到了广泛的应用。为提高系统的驱动能力,增大通信距离,实际应用中多采用Philips公司的82C250作为CAN控制器与物理总线间的接口,即CAN收发器,以增强对总线的差动发送能力和对CAN控制器的差动接收能力。为进一步增强抗干扰能力,往往在CAN 控制器与收发器之间设置光电隔离电路。典型的CAN总线接口电路原理如图1所示。 图1 典型的CAN总线接口电路原理图 1 接口电路设计中的关键问题 1.1 光电隔离电路 光电隔离电路虽然能增强系统的抗干扰能力,但也会增加CAN总线有效回路信号的传输延迟时间,导致通信速率或距离减少。82C250等型号的CAN收发器本身具备瞬间抗干扰、降低射频干扰(RFI)以及实现热防护的能力,其具有的电流限制电路还提供了对总线的进一步保护功能。因此,如果现场传输距离近、电磁干扰小,可以不采用光电隔离,以使系统达到最大的通信速率或距离,并且可以简化接口电路。如果现场环境需要光电隔离,应选用高速光电隔离器件,以减少CAN总线有效回路信号的传输延迟时间,如高速光电耦合器6N137,传输延迟时间短,典型值仅为48 ns,已接近TTL电路传输延迟时间的水平。 1.2 电源隔离 光电隔离器件两侧所用电源Vdd与Vcc必须完全隔离,否则,光电隔离将失去应有的作用。电源的隔离可通过小功率DC/DC电源隔离模块实现,如外形尺寸为DIP-14标准脚位的5 V 双路隔离输出的小功率DC/DC模块。 1.3 上拉电阻 图1中的CAN收发器82C250的发送数据输入端TXD与光电耦合器6N137的
简易CAN总线实验系统设计
简易CAN总线实验系统设计 一、CAN总线 1、定义 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议由德国的Robert Bosch公司开发,用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。 CAN总线是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电子干扰性,并且能够检测出产生的任何错误。CAN总线可以应用于汽车电控制系统、电梯控制系统、安全监测系统、医疗仪器、纺织机械、船舶运输等领域。 2、特点 ●具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点; ●采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作; ●具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络; ●可根据报文的ID决定接收或屏蔽该报文; ●可靠的错误处理和检错机制; ●发送的信息遭到破坏后,可自动重发; ●节点在错误严重的情况下具有自动退出总线的功能; ●报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。 3、工作形式 CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。CAN与I2C总线的许多细节很类似,但也有一些明显的区别。 当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。
高可靠性CAN总线分析与布局设计
南京理工大学2015年校级科研训练 开题报告 高可靠性CAN总线分析与布局设计 指导老师:徐群 小组成员:王宏远913101140233(主持人) 李俊杰913101360110 李泽宇913101340116
一、应用背景 1、CAN简介 CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。 2、CAN 总线特点 (1)CAN 是到目前为止唯一有国际标准现场总线。 (2)CAN 为多主方式工作,网络上任一个节点均可在任意时刻主动向网络上其它 节点发送信息,而不分主从。 (3)在报文标志符上,CAN 上的节点分成不同的优先级,可满足不同的实时要求, 优先级高的数据最多可在134us 内得到传输。 (4)CAN 采用非破坏性总线仲裁技术。 (5)CAN 节点只需通过报文的标识符滤波即可实现点对点,一点对多点及全局广 播等几种方式传送数据,无需专门的“调度”。 (6)CAN 的直接通信距离最远可达10K 米;通信速率最高可达1Mbps。 (7)CAN 上的节点数主要取决与总线驱动电路,目前可达110 多个。 (8)报文采用短帧结构,传输时间短,受干扰概率低,使数据的出错率降低。 (9)CAN 的每帧信息都有CRC 校验及其他检错措施,具有极好的检错效果。 (10)CAN 通信介质可为双绞线、同轴电缆或光纤。 (11)CAN 节点在严重的情况下具有自动关闭输出功能,以使总线上其他节点的操 作不受影响。 (12)CAN 总线具有较高的性能价格比。