IMU惯性测量单元
IMU惯性测量单元
【IMU惯性测量单元简单介绍】
(英文:Inertial measurement unit,简称IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。
一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。在导航中用着很重要的应用价值。
为了提高可靠性,还可以为每个轴配备更多的传感器。一般而言IMU要安装在被测物体的重心上。
【IMU惯性测量装置的工作原理】
IMU惯性测量装置属于捷联式惯导,该系统有两个加速度传感器与三个方向的角速率传感器(陀螺)组成。
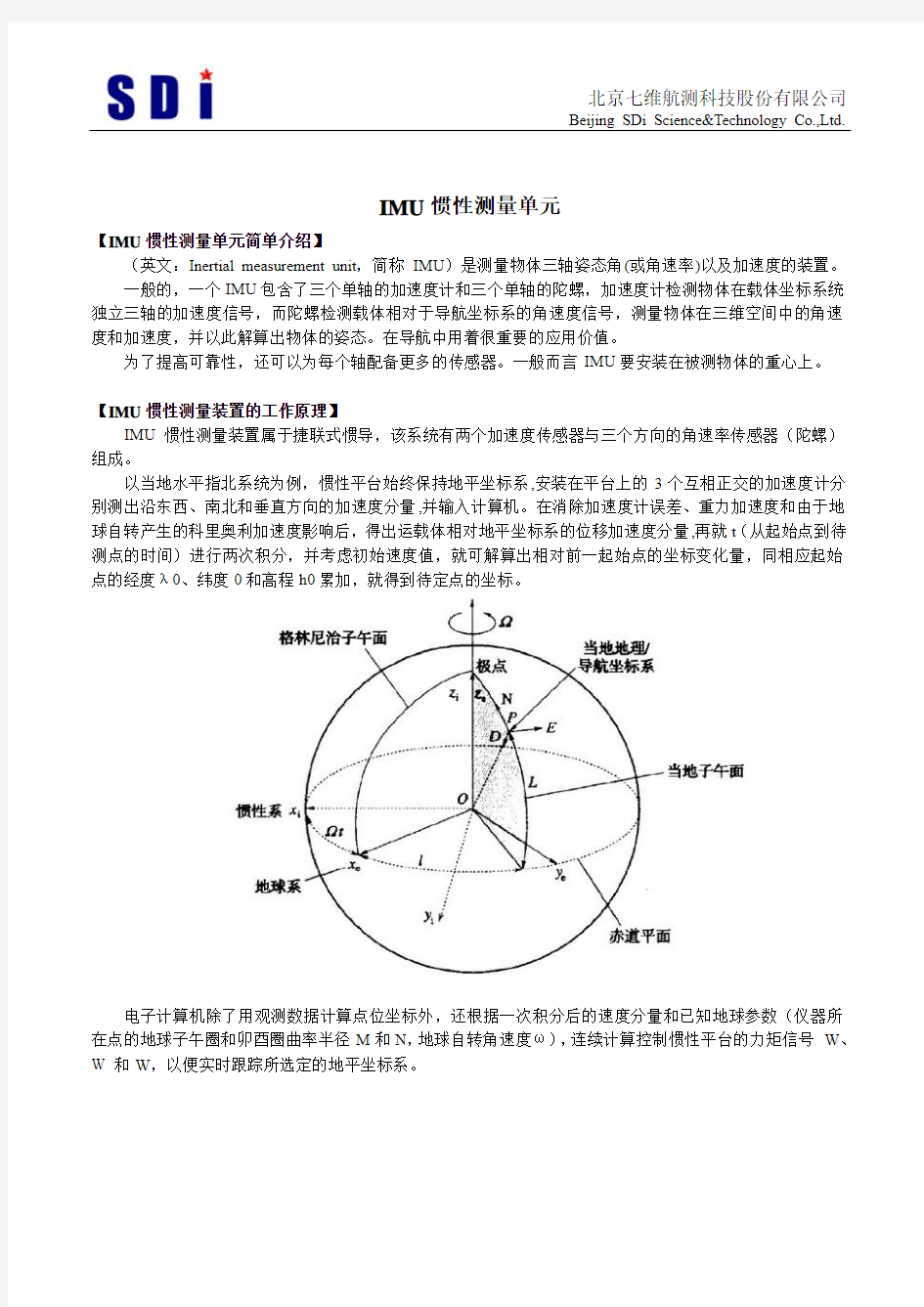
以当地水平指北系统为例,惯性平台始终保持地平坐标系,安装在平台上的3个互相正交的加速度计分别测出沿东西、南北和垂直方向的加速度分量,并输入计算机。在消除加速度计误差、重力加速度和由于地球自转产生的科里奥利加速度影响后,得出运载体相对地平坐标系的位移加速度分量,再就t(从起始点到待测点的时间)进行两次积分,并考虑初始速度值,就可解算出相对前一起始点的坐标变化量,同相应起始点的经度λ0、纬度0和高程h0累加,就得到待定点的坐标。
电子计算机除了用观测数据计算点位坐标外,还根据一次积分后的速度分量和已知地球参数(仪器所在点的地球子午圈和卯酉圈曲率半径M和N,地球自转角速度ω),连续计算控制惯性平台的力矩信号W、W 和W,以便实时跟踪所选定的地平坐标系。
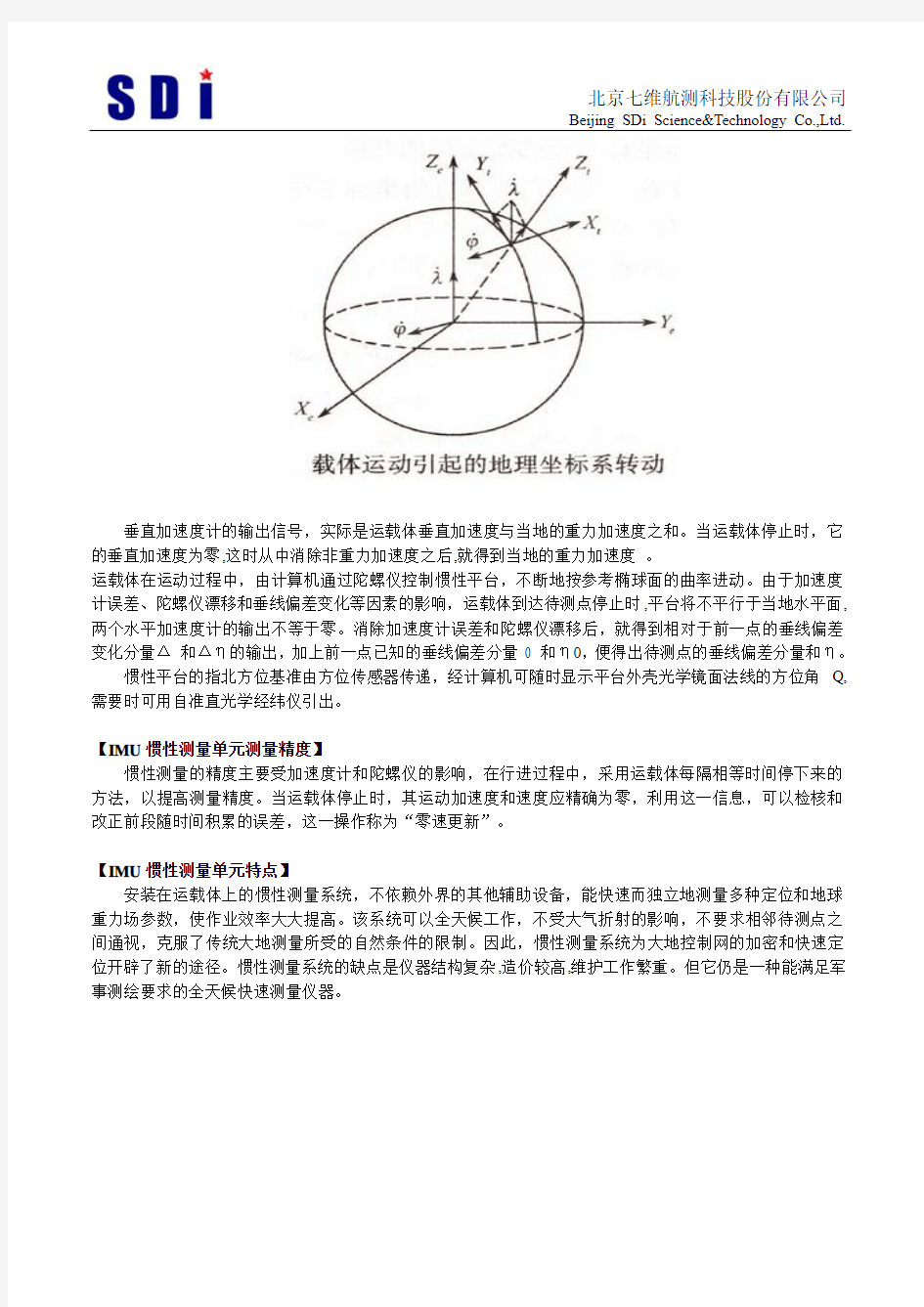
垂直加速度计的输出信号,实际是运载体垂直加速度与当地的重力加速度之和。当运载体停止时,它的垂直加速度为零,这时从中消除非重力加速度之后,就得到当地的重力加速度。
运载体在运动过程中,由计算机通过陀螺仪控制惯性平台,不断地按参考椭球面的曲率进动。由于加速度计误差、陀螺仪漂移和垂线偏差变化等因素的影响,运载体到达待测点停止时,平台将不平行于当地水平面,两个水平加速度计的输出不等于零。消除加速度计误差和陀螺仪漂移后,就得到相对于前一点的垂线偏差变化分量Δ和Δη的输出,加上前一点已知的垂线偏差分量0 和η0,便得出待测点的垂线偏差分量和η。
惯性平台的指北方位基准由方位传感器传递,经计算机可随时显示平台外壳光学镜面法线的方位角Q,需要时可用自准直光学经纬仪引出。
【IMU惯性测量单元测量精度】
惯性测量的精度主要受加速度计和陀螺仪的影响,在行进过程中,采用运载体每隔相等时间停下来的方法,以提高测量精度。当运载体停止时,其运动加速度和速度应精确为零,利用这一信息,可以检核和改正前段随时间积累的误差,这一操作称为“零速更新”。
【IMU惯性测量单元特点】
安装在运载体上的惯性测量系统,不依赖外界的其他辅助设备,能快速而独立地测量多种定位和地球重力场参数,使作业效率大大提高。该系统可以全天候工作,不受大气折射的影响,不要求相邻待测点之间通视,克服了传统大地测量所受的自然条件的限制。因此,惯性测量系统为大地控制网的加密和快速定位开辟了新的途径。惯性测量系统的缺点是仪器结构复杂,造价较高,维护工作繁重。但它仍是一种能满足军事测绘要求的全天候快速测量仪器。
【IMU惯性测量单元运用范围】
IMU大多用在需要进行运动控制的设备,如汽车和机器人上。也被用在需要用姿态进行精密位移推算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。
【典型IMU惯性测量单元技术指标】
IMU440CA惯性测量单元
产品描述:
IMU440使用了基于MEMS技术的陀螺仪和加速度计,提供极具性价比的解决方案,是十多年在海陆空等方面应用经验的结晶。
特点:
·100Hz三轴角速率和加速度输出
·高可靠性MEMS传感器
·全温度范围补偿
·宽温度范围和供电电压
·电磁屏蔽抗振动封装
应用:
·车辆的导航与控制
·UAV姿态稳定
·车辆平衡测试
惯性导航单元芯片公司及基本功能性能 2讲解
MIN-IVA900结合了三个方向角速率陀螺仪,三向加速度计,三轴磁强计,混合运算 器,16 bit模数转换,微控制器等,通过创新性的算法,无论在静态和动态都能给出精确的方 向和姿态。操作在三轴360度的运动状态,提供姿态的Euler角. MIN-IVA900利用三轴陀螺跟踪系统动态的角度,三轴的加速度计和磁场计跟踪静态的角度,而内置的处理器及控制器,通过滤波和算法,输出实时的角度(无论是在静态还是动态), 这就提供了快的响应,当在振动和快速的运动状态下也没有漂移。稳定的输出通过容易使用 的数字格式提供. 方向量程360度,任意轴 传感器量程陀螺:+/-300 deg/s;加速度:+/-1.7 g;磁场:+/-1.2 Gauss FS A/D分辨率16 bits 加速度线性度0.2% 加速度零偏稳定性* 0.010 G's 陀螺线性度0.2% 陀螺零偏稳定性* 0.7 degrees/sec 磁强计线性度0.4% 磁强计零偏稳定性* 0.010 Gauss 方向分辨率<0.1 deg 重复性0.20 deg 精度+/-0.5 deg(静态),+/-2 deg(动态) 输出格式Euler 串口数字输出RS-232 响应速度100Hz 串口数据速率115.2 Kb 供应电压9V DC 供应电流85 mA 操作温度-40 to+70℃ 尺寸27 x 35x 60 mm 冲击1000 G's(非工作状态);500 G's(工作状态) ADIS16355(6DOF)Analog Devices,Inc.(简称ADI公司)将创新、业绩和卓越作 为企业的文化支柱,在此基础上已成长为该技术领域最持久高速增长的企业之一。ADI公司 是业界广泛认可的数据转换和信号调理技术全球领先的供应商,拥有遍布世界各地的60,000 客户,他们事实上代表了全部类型的电子设备制造商。ADI公司作为高性能模拟集成电路(IC)制造商庆祝公司在此行业全球领先40多年,其产品广泛用于模拟信号和数字信号处 理领域。公司总部设在美国马萨诸塞州诺伍德市,全球员工约8900人。公司拥有遍布全球
IMU-惯性测量单元
IMU-惯性测量单元 组合惯导产品是将陀螺,磁力计,加速度计,GPS等有机组合以提供更加丰富精确的导航信息。 IMU(惯性测量单元,可输出载体三轴的角速度,加速度值)。 主要应用在航空、陆地、海洋导航,跟踪控制,平台稳定,ROV/AGV控制,UAV/RPV控制,精准耕种等。 美国Crossbow系列产品: IMU700CB, IMU440CA, IMU321, ADIS16350/ADIS16355; ADIS16350/ADIS16355温度校准iSensor?提供完全的三轴惯性检测(角度运动与线性运动),它是一个小体积模块,适合系统集成。ADIS16355内核采用Analog Devices, Inc., (ADI公司)的iMEMS?传感器技术,内置嵌入式处理用于传感器校准与调谐。SPI接口允许简单的系统接口与编程。 特点: -三轴陀螺仪;动态范围: ±75°/s, ±150°/s, ±300°/s 14位分辨率 -集成三轴加速度计 ±10 g 测试范围 14位分辨率 -带宽:350 Hz -在温度范围内,工厂已校准灵敏度与偏移 ADIS16350: +25°C ADIS16355: −40°C 至+85°C -SPI?兼容串行接口 -承受冲击加速度:2000g(通电情况下) 应用: -飞行器的导航与控制 -平台稳定与控制 -运动控制与分析 -惯性测量单元 -GPS辅助导航 -摄像稳定 -机器人 ADIS16355系列惯性测量单元 参数 条件 典型值 单位 陀螺灵敏度 灵敏度25℃,动态范围:±300°/s 0.07326 °/s/LSB 25℃,动态范围:±150°/s 0.03663 °/s/LSB
基于惯性传感器的机器人姿态监测系统设计
基于惯性传感器的机器人姿态监测系统设计一、设计背景 空间飞行器的惯性测量系统、机器人的平衡姿态检测、机械臂伸展确定等许多方面都需要测量物体的倾斜和方向等姿态参数。机器人的运动过程中要不断的检测机器人的运动状态,以实现对机器人的精确控制。.本文研究的基于MEMS 惯性传感器姿态检测系统用于检测自平衡机器人运动时姿态,以控制机器人的平衡。 随着微机电系统(MEMS)技术的发展,采用传感器应用到姿态检测系统上的条件变得成熟。基于MEMS 技术的加速度传感器和陀螺仪具有抗冲击能力强、可靠性高、寿命长、成本低等优点,是适用于构建姿态检测系统的惯性传感器。利用MEMS 陀螺仪和加速度传感器等惯性传感器组成的姿态检测系统,能够通过对重力矢量夹角和系统转动角速度进行测量,从而实时、准确地检测系统的偏转角度。 由于惯性传感器随着时间、温度的外界变化,会产生不同程度的漂移。通过对陀螺仪和加速度计的采集数据进行数据融合,测量的角度与实际的角度相吻合,取得了良好的控制效果。同时该系统具有独立,易用的特点,其应用前景广泛。 二、基本原理 在地球上任何位置的物体都受到重力的作用而产生一个加速度,加速度传感器可以用来测定变化或恒定的加速度。把三轴加速度传感器固定在物体上,在相对静止状态下,当物体姿态改变时,加速度传感器的敏感轴相对于重力场发生变
化,加速度传感器的三个敏感轴分别输出重力在其相应方向产生的分量信号。 当系统处于变速运动状态时,由于加速度传感器同时受到重力加速度和系统自身加速度的影响,其返回值是重力加速度同系统自身加速度的矢量和。对加速度传感器温度漂移及系统振动和机械噪声等方面的考虑,加速度传感器不能独立运用测量系统的姿态。陀螺仪能够提供瞬间的动态角度变化,由于其本身的固有特性、温度及积分过程的影响,它会随着工作时间的延长产生漂移误差。因此对于姿态检测系统而言,单独使用陀螺仪或加速度计,都不能提供系统姿态的可靠估计。为了克服这些问题,数据融合算法需使用加速度传感器的测量值并使用陀螺仪测得的角速度数据对加速度传感器数据进行融合和矫正。 图1加速度传感器 系统依据上一时刻的重力矢量方向的估计值,结合陀螺仪测得的角度值计算出当前时刻的重力矢量方向,再与当前时刻加速度传感器返回的矢量方向进行加权平均,得到当前矢量方向的最优估计值。 三、系统框架 姿态平衡检测系统中,控制单元采用单片机来完成控制,数据采集与处理,数据通讯等功能。根据对资料的分析,同时对性能价格比的衡量,惯性测量单元
IMU惯性测量单元
IMU惯性测量单元 【IMU惯性测量单元简单介绍】 (英文:Inertial measurement unit,简称IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。 一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。在导航中用着很重要的应用价值。 为了提高可靠性,还可以为每个轴配备更多的传感器。一般而言IMU要安装在被测物体的重心上。 【IMU惯性测量装置的工作原理】 IMU惯性测量装置属于捷联式惯导,该系统有两个加速度传感器与三个方向的角速率传感器(陀螺)组成。 以当地水平指北系统为例,惯性平台始终保持地平坐标系,安装在平台上的3个互相正交的加速度计分别测出沿东西、南北和垂直方向的加速度分量,并输入计算机。在消除加速度计误差、重力加速度和由于地球自转产生的科里奥利加速度影响后,得出运载体相对地平坐标系的位移加速度分量,再就t(从起始点到待测点的时间)进行两次积分,并考虑初始速度值,就可解算出相对前一起始点的坐标变化量,同相应起始点的经度λ0、纬度0和高程h0累加,就得到待定点的坐标。 电子计算机除了用观测数据计算点位坐标外,还根据一次积分后的速度分量和已知地球参数(仪器所在点的地球子午圈和卯酉圈曲率半径M和N,地球自转角速度ω),连续计算控制惯性平台的力矩信号W、W 和W,以便实时跟踪所选定的地平坐标系。
垂直加速度计的输出信号,实际是运载体垂直加速度与当地的重力加速度之和。当运载体停止时,它的垂直加速度为零,这时从中消除非重力加速度之后,就得到当地的重力加速度。 运载体在运动过程中,由计算机通过陀螺仪控制惯性平台,不断地按参考椭球面的曲率进动。由于加速度计误差、陀螺仪漂移和垂线偏差变化等因素的影响,运载体到达待测点停止时,平台将不平行于当地水平面,两个水平加速度计的输出不等于零。消除加速度计误差和陀螺仪漂移后,就得到相对于前一点的垂线偏差变化分量Δ和Δη的输出,加上前一点已知的垂线偏差分量0 和η0,便得出待测点的垂线偏差分量和η。 惯性平台的指北方位基准由方位传感器传递,经计算机可随时显示平台外壳光学镜面法线的方位角Q,需要时可用自准直光学经纬仪引出。 【IMU惯性测量单元测量精度】 惯性测量的精度主要受加速度计和陀螺仪的影响,在行进过程中,采用运载体每隔相等时间停下来的方法,以提高测量精度。当运载体停止时,其运动加速度和速度应精确为零,利用这一信息,可以检核和改正前段随时间积累的误差,这一操作称为“零速更新”。 【IMU惯性测量单元特点】 安装在运载体上的惯性测量系统,不依赖外界的其他辅助设备,能快速而独立地测量多种定位和地球重力场参数,使作业效率大大提高。该系统可以全天候工作,不受大气折射的影响,不要求相邻待测点之间通视,克服了传统大地测量所受的自然条件的限制。因此,惯性测量系统为大地控制网的加密和快速定位开辟了新的途径。惯性测量系统的缺点是仪器结构复杂,造价较高,维护工作繁重。但它仍是一种能满足军事测绘要求的全天候快速测量仪器。
MEMS惯性测量单元测试标定方法研究
MEMS惯性测量单元测试标定方法研究 随着微机械系统的发展和集成电路制造工艺的快速进步,微惯性技术在导航学科中占据了越来越重要的地位。微惯性测量单元借助于自身成本低、体积小、自主性强等优势,在军民用导航领域都发挥着越来越重要的作用。因此,国内外许多科研和教育单位都更加重视微惯性系统的开发与应用。然而,目前常见的MEMS 惯性测量单元的测量精度都相对比较低,现今着重研究如何合理利用科学方法来提升MEMS惯性测量单元的精度有着极其重大的意义。 设计制造测试标定设备,建立MEMS惯性测量单元正确的数学模型,设计更加简捷快速的标定测试方法,是提高MEMS惯性测量单元精度的重要途径,本文主要针对实验室自制的MEMS惯性测量单元展开误差建模和标定技术研究。首先,根据MEMS惯性测量单元的标定测试需求从机械结构、软硬件设计等各方面详细介绍了实验室自制的标定测试设备。其次,分析了MEMS惯性测量单元的误差特性,详细介绍了各个误差参数对MEMS惯性测量单元的影响。针对随机噪声对MEMS惯性测量单元精度影响较大的实际情况,采用Allan方差法定量分析了MEMS陀螺仪的五种主要噪声。 然后,根据MEMS惯性测量单元的特点,分别建立了MEMS陀螺仪和加速度计的误差模型,对MEMS惯性测量单元的分立标定方法进行了详实介绍,并推导了数据处理公式。基于实验室自制的三轴测试标定实验设备,设计了MEMS陀螺的速率实验和加速度计的静态多位置实验,并进行了分立标定实验验证了所用方法的实用性。最后,根据捷联导航误差方程和Kalman滤波器模型建立了合适的状态方程和量测方程,选择合适的MEMS惯性测量单元系统级标定位置编排。根据设计的转停路径进行了MEMS陀螺惯性测量单元的系统级标定实验。 通过测试实验证明了所提出标定方法的有效性。
惯性组合测量方法
惯性组合测量方法 无陀螺惯性测量组合是指惯性测量组合中不使用陀螺测量角速度,而是利用线加速度计测量线加速度的同时,根据线加速度计的空间位置组合解算出角速度,从而得到惯性测量的全部参数,达到惯性导航的目的。 加速度计是无陀螺惯性测量组合的核心元件,然而加速度计在实际使用中不可避免的存在多种误差,其中有器件本身误差项刻度因子误差、偏置、噪声以及安装误差,包括位置误差和方位误差,仿真结果表明,它们是加速度计输出误差的主要来源。 本设计在12加速度计惯性测量组合实物模型及硬件采集电路的基础上,主要对加速度计的刻度因子,固定偏置,噪声以及加速度计的方位误差和安装误差进行分析并进行补偿。 该系统通过硬件采集电路将原始加速度计阵列输出的模拟信号转换成数字信号,并存储到FLASH存储器中,然后将数据通过USB接口传回计算机。通过软件进行数据的分析和处理。 实验系统采用4个三轴加速度计ADXL330构成的加速度计阵列来敏感加速度信号,按照上述配置方案进行配置。信号采集部分主要采用FPGA-XC2S30作为中心控制单元,运用高精度运算放大器OPA4340构建信号调理电路,以两片16位、六通道同步A/D转换器ADS8365完成十二路模拟信号的转换,最大同步转换速率可以达到250kSPS。整个系统由FPGA控制控制FLASH存储器将转换后数据进行存储,并完成包括电源管理、数据采集、存储及读数操作。另外,通过VC++6.0编制的上位机软件实现数据采集处理。 该方案中应用了四片三轴加速度计传感器ADXL330,其三个敏感轴互相垂直,分别安装在惯组质心、X轴、Y轴和Z轴正向,其位置和敏感方向如图所示。 在图中,A1~A12代表加速度计1~12的敏感方向。加速度计1~12的安装位置向量表达式分别为:[0;0;0]、[r;0;0]、[0;r;0]、[0;0;0]、[0;0;r]、[0;r;0]、[0;0;0]、[0;0;r]、[r;0;0]、[0;0;r]、[r;0;0]、[0;r;0],r为距离质心的距离,其值为0.041米。加速度计1~12的安装方
捷联惯性技术的发展及与平台惯导系统的对比
捷联惯性技术的发展及与平台惯导系统的对比 [2009-06-20] 作者:admin 来源: 1.惯性技术与惯性导航的概述 惯性技术是惯性导航技术、惯性制导技术、惯性仪表技术、惯性测量技术以及惯性测试设备和装置技术的统称。它已有四十多年的发展历史了。由于惯性技术的自主性等特点,它不需要引人外界信息便可实现制导于导航。所以,它在国防科技中占有非常重要的地位,广泛的运用于航天、航空、航海等军事领域;随着惯性技术和计算机技术的不断发展以及成本降低,许多国家将其应用领域扩大到现代化交通运输、海洋开发、大地测量与勘探、石油钻井、矿井、隧道的掘进与贯通、机器人控制、现代化医疗器械、摄影技术以及森林防护、农业播种、施肥等民用领域。 惯性导航系统(Inertial Navigation System),简称惯导,是利用惯性敏感元件、基准方向及最初的位置信息来确定运载体的方位、姿态和速度的自主式航位推算系统。惯性导航系统可以分为平台式惯导系统和捷联式惯导系统两大类:平台式惯导系统是将陀螺仪和加速计安装在一个稳定平台上,以平台坐标系为基准,测量运载体运动参数的惯性导航系统;捷联式惯导系统(Strapdown Inertial Navigation System , SI )是将惯性敏感元件(陀螺仪和加速计)直接安装在运载体上,是一种不再需要稳定平台或常平架系统的惯性导航系统。 导航的目的就是为了得到运载体的实时的方位、姿态和速度。在工程运用中,能够测定物体运动参数的方法很多:如测量位移可以用里程计,还可以用无线电定位技术、天文定位技术和卫星定位技术等;要测速度可以用测速计;要测转角可用角位置传感器(电位计、光电码盘等等);要测角速度可以用转速表、测速电机等等。但是,以上各种测量手段还没有一种能够在同一时刻单独实时而又高精度地测量运载体的线运动和角运动,而惯性技术恰是测量这些运动参数的最理想的手段。
基于MEMS技术的惯性测量器件及系统的发展现状和应用_文炜
控制与制导 本文2006-04-12收到,作者文炜系中国航天科工集团三院三部助理工程师 基于ME M S 技术的惯性测量器件 及系统的发展现状和应用 文 炜 ▲ M E M S 系统示意图 摘 要 简要描述了M E M S 系 统的特点,介绍了基于M E M S 技术的惯性测量器件及系统在国外的发展现状及应用情况,从武器系统低成本、小型化、高可靠性的发展趋势说明了武器系统中使用M E M S 技术的必要性,同时根据武器系统对惯性测量器件的要求,通过国外武器系统中的成功应用说明了M E M S 技术在飞航导弹或无人机的控制系统中使用的可行性,最后针对国内M E M S 技术的发展情况,对M E M S 惯性测量器件及系统在武器系统中的应用提出了相关要求。 关键词 M E M S 惯性传感器 惯性测量系统 武器系统 概 述 M E MS (M icro -E l e ctro -M e -chanical Syste m s )即微机电系统,它属于多学科交叉的新领域,是融合微电子与精密机械加工的技 术,集微型机构、传感器信号处理、控制等功能于一体的、具有信息获取、处理和执行等多功能的系统。完整的ME M S 是由微传感器、微执行器、信号处理和控制电路、通讯接口和电源等部件组成的一体化的微型器件系统。 其目标是把信息的获取、处理和执行集成在一起,组成具有多功 能的微型系统,集成于大尺寸系统中,从而大幅度地提高系统的自动化、智能化和可靠性水平。基于ME M S 技术生产的M E M S 器件具有体积小、质量轻、成本低、抗冲击、可靠性高等优点,在汽车、电子、家电、机电等行业以及军事领域有着极为广阔的应用前景。 飞航导弹或无人机的控制系统一般采用自动驾驶仪或惯性导航系统两种形式,而这两种系统均大量采用惯性传感器,其中自动驾驶仪的惯性传感器为陀螺仪,惯性导航系统的惯性传感器 为加速度计和陀螺仪。采用ME M S 惯性传感器或惯性测量系统可以在一定程度上降低成本、减小体积、提高性能并降低功耗。 1 ME M S 传感器的发展及应用 ME M S 技术自从20世纪80年代出现以来引起了世界各国的高度重视,西方国家尤其是美国投入了大量的资金及研究人员进入这一领域。美国德雷泊实验室、喷气推进实验室、利顿公司,德国LI T EF 公司、法国SA -GE M 公司、模拟器件公司及俄罗斯维克托公司等都在ME M S 惯性器件、ME MS -I M U 和低成本 DOI 牶牨牥牣牨牰牫牫牳牤j 牣issn 牣牨牥牥牴牠牨牫牨牴牣牪牥牥牰牣牥牴牣牥牨牴
光纤陀螺惯性测量单元的设计与实现
·仪表研究与设计· 文章编号:10056734(1999)01002804 光纤陀螺惯性测量单元的设计与实现 宋凝芳,张春熹,马迎建,杜新政,张维叙 (北京航空航天大学,北京 100083) 摘要:本文介绍采用全数字闭环光纤陀螺组成的惯性测量单元的实现方法,采用DSP作为中央处理单元,完成三轴组合的时序控制、数字解调、滤波算法、波形合成及数据传输,并对三轴陀螺进行了全面的性能测试,测试结果表明惯性测量单元中每个陀螺零漂均小于0.5°/h,标度因数线性度<200ppm,达到了预期的设计要求。 关键词:光纤陀螺;惯性测量单元;DSP;闭环 中图分类号:V241.5 文献标识码:A Design and Implementation of IMU Based on FOGs SON G Ning fang,ZHANG Chun xi,M A Ying jian,DU Xin zheng,ZHAN Wei x u (Beijing Univ ersity o f Aero nautics and Astronautics,Beijing100083,China) Abstract:This paper describes a n im plenentatio n method o f Inertia l M easurem ent Units (IM U)using all digital Fiber Optic Cyro sco pes(FOG).Th e timing contro l,digital demodu-lation,filter alg orithms,w av efo rm combinataon a nd data com munica tion fo r the three axis integ rated FO G a re carried out by a digital sig nal processo r(DSP).The test result of three FOGs is presented.The perfo rmance o f<0.5°/h bias stability,<200ppm scale factor accura-cy is achiev ed,and the system sa tisfies the desig n requirem ents. Key words:Fiber Optic Gy roscope;inertial measurement unit;digital signal processor; closed loo p 1 引言 光纤陀螺是一种完全不同于常规机电陀螺的光电传感器。它没有机械活动部件,具有工艺简单、体积小、重量轻、启动速度快、灵敏度高、动态范围大、抗冲击和耐过载等一系列的优异性能。在航空、航天、航海等军用及地质、石油勘探等民用领域具有广阔的发展前景,成为国内外研究的热点。国内在光纤陀螺研究方面也投入了大量人力、物力。目前,单轴光纤陀螺技术已经成熟,接近实用化。 惯性测量单元为导航、制导和控制系统的核心,主要由以下几部分组成: ①陀螺传感器,用于敏感角速度或角度。 ②加速度计传感器,用于敏感比力,从而获得速度、位置的变化量。 ③处理器部件,用于处理陀螺和加速度计传感器数据,形成系统解算所需的信息。 随着以计算机为“数学平台”的捷联技术的发展,由捷联式测量单元构成的系统在某些应用中正在逐渐取代传统的框架式系统。对惯性器件(陀螺仪和加速度计)也提出了更高的要求,而传统的机电陀螺已很难满足这方面的要求。光纤陀螺作为中等精度器件,应用于惯性测量单元中,具有令人称道的特性。与挠性陀螺相比,它具有抗冲击及可靠性高等特性;与激光陀螺相比,具有体积小、成本低及无闭锁的特点。因此,特别适合于构造惯 收稿日期:19990118 作者简介:宋凝芳,女,北京航空航天大学宇航学院讲师,从事G PS应用及光纤陀螺研究。 中国惯性技术学报 1999年3月第7卷第1期
MEMS惯性测量单元(IMU)-陀螺仪对准基础
MEMS惯性测量单元(IMU)/陀螺仪对准基础 对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。对于IMU中的陀螺仪,传感器对准误差描述各陀螺仪的旋转轴与系统定义的惯性参考系(也称为全局坐标系)之间的角度差。为了管控对准误差对传感器精度的影响,可能需要独特的封装、特殊的组装工艺,甚至在最终配置中进行复杂的惯性测试。 所有这些事情都可能会对项目管理的重要指标:如计划、投资和各系统中IMU相关的总成本等,产生重大影响。因此,在设计周期的早期,当还有时间界定系统架构以实现最有效解决方案的时候,对传感器对准误差加以考虑是十分有必要的。毕竟,没有人希望在烧掉项目80%的计划时间和预算之后才发现,为了满足最终用户不容商量的交货要求,其并不昂贵的传感器需要增加数百甚至数千美元的意外成本,那样可就糟糕至极了! 设计系统的IMU功能架构时,有三个基本对准概念需要了解和评估:误差估计、对准误差对系统关键行为的影响以及电子对准(安装后)。初始误差估计应当包括IMU以及在运行过程中将其固定就位的机械系统这两方面的误差贡献。了解这些误差对系统关键功能的影响有助于确立相关性能目标,防止过度处理问题,同时管控无法兑现关键性能和成本承诺的风险。最后,为了优化系统的性能或以成本换空间,可能需要某种形式的电子对准。预测安装后的对准误差一个应用的对准精度取决于两个关键因素:IMU的对准误差和在运行过程中将其固定就位的机械系统的精度。IMU的贡献(IMU)和系统的贡献(SYS)通常并不相关,估计总对准误差时,常常是利用和方根计算将这两个误差源加以合并: 某些IMU规格表通过轴到封装对准误差或轴到坐标系对准误差等参数来量化对准误差。图1以夸张方式显示了ADIS16485中各陀螺仪相对于其封装边缘的对准误差。图中的绿色虚线代表封装定义的参考系的各轴。实线代表封装内部陀螺仪的旋转轴,IMU代表三个对准误差项的最大值(X、Y、Z)。
基于惯性传感器的机器人姿态监测系统设计说明
基于惯性传感器的机器人姿态监测系统设计 一、设计背景 空间飞行器的惯性测量系统、机器人的平衡姿态检测、机械臂伸展确定等许多方面都需要测量物体的倾斜和方向等姿态参数。机器人的运动过程中要不断的检测机器人的运动状态,以实现对机器人的精确控制。.本文研究的基于MEMS 惯性传感器姿态检测系统用于检测自平衡机器人运动时姿态,以控制机器人的平衡。 随着微机电系统(MEMS)技术的发展,采用传感器应用到姿态检测系统上的条件变得成熟。基于 MEMS 技术的加速度传感器和陀螺仪具有抗冲击能力强、可靠性高、寿命长、成本低等优点,是适用于构建姿态检测系统的惯性传感器。利用MEMS 陀螺仪和加速度传感器等惯性传感器组成的姿态检测系统,能够通过对重力矢量夹角和系统转动角速度进行测量,从而实时、准确地检测系统的偏转角度。 由于惯性传感器随着时间、温度的外界变化,会产生不同程度的漂移。通过对陀螺仪和加速度计的采集数据进行数据融合,测量的角度与实际的角度相吻合,取得了良好的控制效果。同时该系统具有独立,易用的特点,其应用前景广泛。 二、基本原理 在地球上任何位置的物体都受到重力的作用而产生一个加速度,加速度传感器可以用来测定变化或恒定的加速度。把三轴加速度传感器固定在物体上,在相对静止状态下,当物体姿态改变时,加速度传感器的敏感轴相对于重力场发生变化,加速度传感器的三个敏感轴分别输出重力在其相应方向产生的分量信号。 当系统处于变速运动状态时,由于加速度传感器同时受到重力加速度和系统自身加速度的影响,其返回值是重力加速度同系统自身加速度的矢量和。对加速度传感器温度漂移及系统振动和机械噪声等方面的考虑,加速度传感器不能独立运用测量系统的姿态。陀螺仪能够提供瞬间的动态角度变化,由于其本身的固有特性、温度及积分过程的影响,它会随着工作时间的延长产生漂移误差。因此对
惯性测量单元安装误差系数标定
惯性测量单元安装误差系数标定实验 二零一三年六月十日
2.1 惯性测量单元安装误差系数标定试验 一、实验目的 1、掌握惯性测量单元(inertial measurement unit ,IMU )的标度系数、安装 误差、零偏的标定方法; 2、利用现有实验条件实现实验过程的设计。 二、实验内容 利用单轴速率转台,进行IMU 的安装误差系数标定,并通过公式计算该安装误差系数。 三、实验系统组成 单轴速率位置转台、MEMS 惯性测量单元、稳压电源、数据采集系统。 四、实验原理 IMU 安装误差系数的计算方法 通常,惯导系统至少需要三个陀螺和三个加速度计,用以感知载体的三轴角速度和加速度变化。将这些陀螺和加计按照敏感轴两两正交的方式集成在一起,安装在一个结构框架上,便构成了一个能感知完整惯性测量信息的小型系统,称之为惯性测量单元。对惯性测量单元进行标定时,除了要对其中的陀螺、加速度计进行常规标定外,还要考虑由于安装时不能严格保证敏感轴两两正交所带来的交叉耦合误差,即,要对IMU 的安装误差进行标定,测量出不正交角。因此,在考虑IMU 的安装误差、标度因数误差、零偏误差的情况下,建立东北天坐标系下IMU 的角速度通道误差方程。 x x xx xy xz x y y yx yy yz y z z zx zy zz z K E E E K E E E K ωεωωεωωεω???????? ????????=+??????????????? ????????? (1) 式中i ω为惯性系统i 轴向陀螺输出角速度,i ω为i 轴向的输入角速度;i ε为i 轴向陀螺零偏;ii K 为i 轴向陀螺标度因数;ij E 为角速度通道的安装误差系
2020-2025年MEMS运动传感器及IMU惯性测量单元分析报告1.0
MEMS运动传感器及IMU惯性测量单元 M EMS运动传感器及IMU惯性测量单元 分析报告
目录 第一篇、行业概况及产品介绍............................................................................................................. - 4 - (一)行业概况............................................................................................................................. - 4 - (二)研究产品介绍..................................................................................................................... - 7 - 第二篇、产业链..................................................................................................................................... - 9 - (一)产业链及构成..................................................................................................................... - 9 - (二)产业生态........................................................................................................................... - 11 - 第三篇、行业现状............................................................................................................................... - 12 - (一)国家政策........................................................................................................................... - 12 - (二)市场规模......................................................................................................................... - 12 - (三)下游应用........................................................................................................................... - 15 - 第四篇、市场竞争格局及发展方向................................................................................................... - 17 - (一)MEMS传感器市场竞争格局.............................................................................................. - 17 - (二)MEMS传感器发展方向...................................................................................................... - 25 - (三)MEMS传感器技术方向...................................................................................................... - 27 - (四)基于MEMS技术的IMU发展方向..................................................................................... - 28 - 第五篇、业内主要企业分析............................................................................................................... - 29 - 图表目录 图表1 MEMS传感器基本构成情况 ...................................................................................... - 4 - 图表2 MEMS传感器产品分类.................................................................................................. - 5 - 图表3 中国MEMS传感器产业链............................................................................................. - 9 - 图表4 MEMS传感器生态系统................................................................................................ - 11 - 图表5 中国MEMS传感器行业市场规模预测 .................................................................. - 14 - 图表6 全球MEMS传感器行业销售收入按国别分布情况............................................. - 18 - 图表7 中国主要MEMS企业区域分布 ............................................................................... - 19 - 图表8 M EMS细分产品市场前景分布..................................................................................... - 20 - 图表9 全球MEMS传感器细分产品市场占比统计情况 ................................................. - 21 - 图表10 我国MEMS传感器行业产品使用结构(单位:%) ............................................... - 21 - 图表11 2018年全球MEMS传感器各应用领域 ............................................................... - 22 - 图表12 我国MEMS传感器主要应用领域市场份额(单位:%) ........................................... - 23 - 图表13 全球MEMS传感器企业构成..................................................................................... - 24 -
惯性测量单元
惯性测量单元 惯性测量单元 (英文:Inertial measurement unit,简称 IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。 一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物 体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。在导航中用着很重要的应用价值。 为了提高可靠性,还可以为每个轴配备更多的传感器。一般而言IMU要安装在被测 物体的重心上。 IMU大多用在需要进行运动控制的设备,如汽车和机器人上。也被用在需要用姿态进行精密位移推算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。 背景技术 利用三轴地磁解耦和三轴加速度计,受外力加速度影响很大,在运动/振动等环境 中,输出方向角误差较大,此外地磁传感器有缺点,它的绝对参照物是地磁场的磁力线,地 磁的特点是使用范围大,但强度较低,约零点几高斯,非常容易受到其它磁体的干扰,如果融合了Z轴陀螺仪的瞬时角度,就可以使系统数据更加稳定。加速度测量的是重力方向,在无外力加速度的情况下,能准确输出ROLL/PITCH两轴姿态角度并且此角度不会 有累积误差,在更长的时间尺度内都是准确的。但是加速度传感器测角度的缺点是加速度传感器实际上是用MEMS技术检测惯性力造成的微小形变,而惯性力与重力本质是一样的,所以加速度计就不会区分重力加速度与外力加速度,当系统在三维空间做变速运动时,它的输出就不正确了。 陀螺仪输出角速度,是瞬时量,角速度在姿态平衡上是不能直接使用,需要角速度 与时间积分计算角度,得到的角度变化量与初始角度相加,就得到目标角度,其中积分时间Dt越小,输出角度越精确,但陀螺仪的原理决定了它的测量基准是自身,并没有系统外的绝对参照物,加上Dt是不可能无限小,所以积分的累积误差会随着时间流逝迅速增加,最终导致输出角度与实际不符,所以陀螺仪只能工作在相对较短的时间尺度内。 所以在没有其它参照物的基础上,要得到较为真实的姿态角,就要利用加权算法扬长避短,结合两者的优点,摈弃其各自缺点,设计算法在短时间尺度内增加陀螺仪的权值,在更长时间尺度内增加加速度权值,这样系统输出角度就接近真实值了。[1] 惯性测量装置IMU的工作原理
惯性测量单元
3DM-GX4-15 是一个高性能的工业应用级别微型惯性测试单元(IMU),使用最先进MEMS 传感技术。它联合使用一个三向加速度计、一个三向陀螺仪、一个温度传感器、一个气压高度计和一个运算复杂的自适应卡尔曼滤波器的内嵌双核微处理器。从而为用户提供精确的静态和动态倾斜测量和惯性测量。这些技术使得3DM-GX4-15成为同级别产品中体积最小和重量最轻的设备。 优点 ? 高性能陀螺仪 ?噪声密度: 0.005°/sec/√Hz ?漂移: 10°/hr ? g 2 灵敏度: 0.003°/s/g 2 rms ? 专用的运算微处理器,提供精确的倾斜测量估值数据 ? 高速采样频率及多种数据输出方式 ? -40 °C to +85 °C 工作环境温度 ? 动态环境下高性能和高稳定性 ? 市场上最小,最轻的带自适应卡尔曼滤波器的工业应用级别惯性测量单元(IMU ) ? SDK 软件开发包及开放通信协议,易于集成开发自主系统 应用 在动态环境下为用户提供非常稳定和精确的导航和姿态数据 ? 平台稳定性和人工地平线 ? 天线和相机指向 ? 机车健康及使用状态监测 ? 机器人控制 简介 3DM-GX4-15微型惯性测试单元提供各种输出数据参量,从完全标定的惯性测量(加速度,角速度和或角度增量和速度向量增量)到经过运算的定向估值的欧拉角(俯仰、翻滚)、旋转矩阵、四元素。由于使用了复杂的自适应卡尔曼滤波器,运算的估值数据不会受到直线运动的干扰。偏移追踪和传感器噪声模式可以让用户对自己的设备应用进行微调,从而达到更好的测量效果。所有参量都经过温度补偿和数学运算再转换到正交坐标系统。 系统的架构设计已经充分消除了多种可能的误差源:如由于温度变化引起的增益和补偿误差;由于电源电压波动引起的灵敏度变化等因素。陀螺仪漂移非常小,基于复杂的运算估值技术,3DM-GX4-15性 能已经接近满足战术应用级别的要求。
基于惯性测量单元的人体下肢运动捕捉算法研究
哈尔滨工业大学工学硕士学位论文 Abstract Inertial human motion capture system is an autonomous navigation motion capture system. It does not require an external launch source. It can perform motion capture indoors and outdoors. It is easy to wear, with no site restrictions and no delay. This study is based on the inertial measurements units (IMU) of the human lower limb movement capture algorithm, the purpose is to prepare for the development of the human body lower limb movement capture system, this system is mainly used in postoperative rehabilitation of patients with knee joint injury. This topic has studied related algorithms, improved some algorithms, and designed some new algorithms. Three simulation experiments and two physical experiments have been designed to verify the established algorithm. The main research contents are as follows: First, the calibration algorithm between the IMU and the limb was studied. Researched an existing algorithm for joint position estimation using the least square method. This topic expands the algorithm for estimating the position of spherical secondary joints. In this paper, a new joint axis position estimation algorithm is designed for the problem that the hinge joint axis estimation algorithm is unstable and has poor accuracy. This paper studies the existing problems of the existing IMU initial attitude calibration methods, and designs a new relative IMU relative attitude calibration algorithm for the problems. In this paper, simulation experiments are designed to verify the calibration algorithm. Then, the pose estimation algorithm for a single IMU is studied. This article studies how to build a Kalman filter (KF) model to form a KF algorithm that fuses gyro, accelerometer, and magnetometer signals. For the mathematical model of IMU, this paper designs a linear KF model and a nonlinear KF model. The nonlinear KF model is implemented by using extended Kalman filter (EKF) and unscented Kalman filter (UKF) respectively. In this paper, an adaptive parameter adjuster is designed to form three algorithms: AKF, AEKF and AUKF. In this paper, the simulation experiment is designed to verify and select the algorithm, and the physical experiment is designed to further verify the selected algorithm. Finally, the establishment of human body limb coordinate system and joint angle estimation algorithm are studied. This paper studies the algorithm of establishing the limb coordinate system using the parameters obtained by the calibration algorithm. Based on the the limb coordinate system, This paper also uses the posture estimation information