二维运动估计

189
二维运动估计
早期设计的机器视觉系统主要是针对静态场景的,为了满足更高级的应用需求,必须研究用于动态场景分析的机器视觉系统.动态场景分析视觉系统一般需要较大的存储空间和较快的计算速度,因为系统的输入是反应场景动态变化的图像序列,其包含的数据十分巨大.图像动态变化可能由摄像机运动、物体运动或光照改变引起,也可能由物体结构、大小或形状变化引起.为了简化分析,通常我们假设场景变化是由摄像机运动和物体运动引起的,并假设物体是刚性的.
根据摄像机和场景是否运动将运动分析划分为四种模式:摄像机静止-物体静止,摄像机静止-物体运动,摄像机运动-物体静止,摄像机运动-物体运动,每一种模式需要不同的分析方法和算法。摄像机静止-物体静止模式属于简单的静态场景分析.摄像机静止-场景运动是一类非常重要的动态场景分析,包括运动目标检测、目标运动特性估计等,主要用于预警、监视、目标跟踪等场合。摄像机运动—物体静止是另一类非常重要的动态场景分析,包括基于运动的场景分析、理解,三维运动分析等,主要用于移动机器人视觉导航、目标自动锁定与识别等.在动态场景分析中,摄像机运动—物体运动是最一般的情况,也是最难的问题,目前对该问题研究的还很少.
图像运动估计是动态场景分析的基础,现在已经成为计算机视觉新的研究热点。根据所涉及的空间,将图像运动估计分为二维运动估计和三维运动估计,显然,这种划分不是十分严格,因为二维运动参数的求解有时需要三维空间的有关参数引导,而许多三维参数的求解需要以二维参数为基础。本章主要讨论二维运动估计,三维运动估计和分析将在第十五章讨论。
1图像运动特征检测
对许多应用来说,检测图像序列中相邻两帧图像的差异是非常重要的步骤.场景中任何可察觉的运动都会体现在场景图像序列的变化上,如能检测这种变化,就可以分析其运动特性.如果物体的运动限制在平行于图像平面的一个平面上,则可以得到物体运动特性定量参数的很好估计.对于三维运动,则只能得到物体空间运动的定性参数估计.场景中光照的变化也会引图像强度值的变化,有时会引起较大的变化.动态场景分析的许多技术都是基于对图像序列变化的检测.检测图像变化可以在不同的层次上进行,如像素、边缘或区域.在像素层次上要对所有可能的变化进行检测,以便在后处理阶段或更高层次上使用.
1.1差分图像
检测图像序列相邻两帧之间变化的最简单方法是直接比较两帧图像对应像素点的灰度值.在这种最简单的形式下,帧),,(j y x f 与帧),,(k y x f 之间的变化可用一个二值差分图像),(y x f DP jk 表示:
???>-=其它如果0),,(),,(1),(T k y x f j y x f y x f DP jk (1)
式中T 是阈值.
在差分图像中,取值为1的像素点被认为是物体运动或光照变化的结果.这里假设帧与帧之间配准或套准得很好.图1和2示意了两种图像变化情况,一种是由于光照变化造成的图像变化,另一种是由于物体的运动产生的图像变化.需要指出,阈值在这里
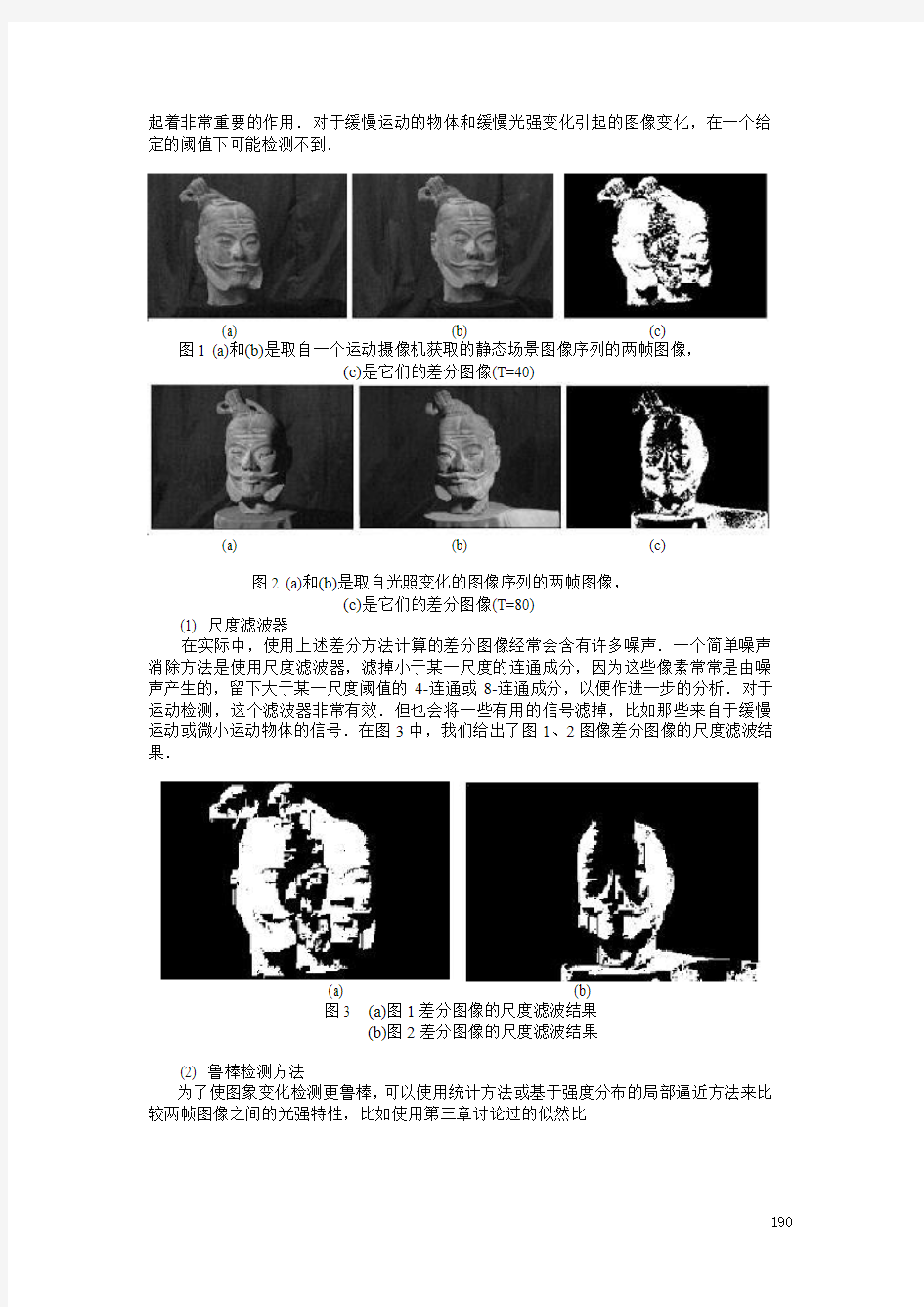
起着非常重要的作用.对于缓慢运动的物体和缓慢光强变化引起的图像变化,在一个给
定的阈值下可能检测不到.
(a) (b) (c)
图1 (a)和(b)是取自一个运动摄像机获取的静态场景图像序列的两帧图像,
(T=40)
(c)是它们的差分图像
(a) (b) (c)
图2 (a)和(b)是取自光照变化的图像序列的两帧图像,
(c)是它们的差分图像(T=80)
(1) 尺度滤波器
在实际中,使用上述差分方法计算的差分图像经常会含有许多噪声.一个简单噪声
消除方法是使用尺度滤波器,滤掉小于某一尺度的连通成分,因为这些像素常常是由噪
声产生的,留下大于某一尺度阈值的4-连通或8-连通成分,以便作进一步的分析.对于
运动检测,这个滤波器非常有效.但也会将一些有用的信号滤掉,比如那些来自于缓慢
运动或微小运动物体的信号.在图3中,我们给出了图1、2图像差分图像的尺度滤波结果.
(a) (b)
图3 (a)图1差分图像的尺度滤波结果
(b)图2差分图像的尺度滤波结果
(2) 鲁棒检测方法
为了使图象变化检测更鲁棒,可以使用统计方法或基于强度分布的局部逼近方法来比
较两帧图像之间的光强特性,比如使用第三章讨论过的似然比
190
191
2
12
22121)2(2σσμμσσλ*?????
?-++= (2) 来进行两帧图像之间的比较,(式中μ和σ表示区域的平均灰度和方差),然后计算差分图像:
???>=其它
如果01),(T y x f DP jk λ (3) 式中T 是阈值.对于许多真实场景,将似然比和尺度滤波组合起来使用是非常有效的. 上面讨论的似然比测试是基于区域服从均匀二阶统计的假设.如果使用小平面和二次平面来近似这些区域,似然比测试方法的性能还能有显著的提高.注意,似然比测试是在像素层次上检测相似度,,因此只能确定所考察的区域是否有同样的灰度特征;有关区域的相对强度信息则没有得到保留.使用似然比方法检测图像序列中的运动部分可能增加计算量。
(3) 累积差分图像
缓慢运动物体在图像中的变化量是一个很小的量,尺度滤波器可能会将这些微小量当作噪声滤掉.当使用鲁棒检测方法时,因为是基于区域的变化检测,因此会使得检测小位移或缓慢运动物体的问题变得更加严重.
解决这一问题的一种方法是累积差分图像方法(accumulative difference picture, ADP ),其基本思想是通过分析整个图像序列的变化(而不是仅仅分析两帧之间的变化)来检测小位移或缓慢运动物体.这种方法不仅能用来可靠检测微小运动或缓慢运动的物体,也可用来估计物体移动速度的大小和方向以及物体尺度的大小.累积差分图像可分为一阶累积差分图像(FADP )和二阶累积差分图像(SADP )。
一阶累积差分图像的形成过程如下:将图像序列的每一帧图像与一幅参考图像进行比较,当差值大于某一阈值时,就在累积差分图像中加1.通常将图像序列的第一帧作为参考图像,并且置累积差分图像0FADP 的初始值为0.
这样,在第k 帧图像上的累积差分图像),(y x FADP k 为:
?
??-==-其它),(),(00),(11y x DP y x FADP k y x FADP k k k (4) 图4是利用累积差分图像检测的结果示意图.
二阶差分图像的构造为:对应于第n 帧)110(>=n N n 且,,, 的二阶差分图像在),(y x 位置的值为“1”,表明在这个位置上第1-n 帧和第n 帧的一阶差分图像FADP 具有不同的符号.
?
??>≠=-其它01),(),(1),(1k y x SADP y x SADP y x SADP k k k (5) 累积差分图像具有许多性质,可以用于描述物体运动的总体参数[Jain]
(a) (b) (c)
192
图4 (a) 第一帧图像(参考图像),(b) 第三帧后的累积差分图像,
(c) 最后一帧后的累积差分图像
用于运动检测的差分图像的最大特点是它的简单性,但差分图像极易受噪声污染.照明和摄像机位置的改变,以及摄像机的电子噪声,都会产生很多错误数据.将似然比和尺度滤波器组合起来能消除大部分摄像机噪声.照明的改变会给所有基于光强的运动检测方法带来问题,这些问题有可能在后期的分析和理解层次上得以解决.图像序列各帧之间的错误套准也会导致错误数据,如果套准错误不十分严重,则累积差分图像还是可以消除这些错误数据的.
必须强调,在像素层次上检测不相似度只能通过检测光强变化来实现.在动态场景分析中,这是最低层次的分析.在检测完像素变化以后,还需要通过其它的处理过程来解释这些变化.经验表明,差分图像最有效的应用是对图像进行概略处理,以便将解释的注意力引向场景中出现“活动”的区域.场景中事件的粗略信息也可由差分图像中的某些特征来提取.
1.2 时变边缘检测
我们知道,边缘在静态场景图像分析中起着十分重要的作用,因此有理由推测时变边缘在动态场景图像分析中也是非常重要的.在进行图像分割与匹配方法中,人们将精力主要集中在静态特征与运动特征之间的匹配.实际上,这些静态特征是运动信息提取的最大障碍.如果直接检测运动特征,那么完成匹配所需的计算量可以根本上大大减小. 一条边缘运动后仍然是一条边缘.运动边缘是通过逻辑“与”算子对时间和空间梯度进行组合来实现,其中的“与”算子可以由乘法来完成.这样,图像E x y t (,,)中一点的时变边缘由下式给出:
)
,(),,(),,(),,(),,(y x D t y x E dt
t y x dE dS t y x dE t y x E t ?=?= (6) 式中dS t y x dE ),,(和dt
t y x dE ),,(分别是点),,(t y x 的光强在空间和时间上的梯度值. 各种传统的边缘检测方法可用于计算空间梯度,而简单的差分方法可用于计算时间梯度.在大多数情况下,边缘算法很有效.为了克服遗漏缓慢运动边缘和弱边缘的问题,可将一个阈值作用于上式的乘积,而不是一阶差分,然后使用边缘检测器或一阶检测边缘器算出它们的时间梯度[Jain],如图5和6所示.由图6可见,这种边缘检测方法将对有清晰边缘的缓慢运动和以适当速度运动的弱边缘响应.这种检测方法的另一个重要特点是不需要对任何位移大小作出假设.当边缘的运动非常大时,检测器的性能也是十分满意的.
(a) (b) (c)
193
图5 时变边缘检测器运行结果示意图
图6 边缘检测器的性能曲线
1.3 运动对应性
已知一个图像序列,我们可以分析并确定序列中每一帧图像上的特征点.为估计图像运动特性,必须在图像各帧之间建立这些特征点的对应关系.运动图像的对应问题与立体视觉中的对应问题相似,不过立体视觉使用的约束主要是外极线约束,运动图像对应问题使用的是其它类型的约束.下面讨论一种约束传播方法来解决对应问题.
(1) 松弛标记
标记(labeling)是指将一组已知标记分配给场景中对应的各个物体。标记问题可以表示为如图7所示的形式.每一个节点表示一个标记区域(或物体),连结节点的弧线表示区域间的关系.假定每一个节点上有一个处理器,在每一个节点上定义集合R ,C ,L 和P .集合R 包含节点间所有可能的关系(relation );集合C 表示这些关系的相容性(compatibility ),相容性将有助于对关系R 进行约束以及对图像中每个区域的标记进行约束;集合L 包含所有指定给该节点的标记;集合P 表示计算过程中赋予节点的所有可能的层次.假定在第一次迭代中,节点i 的可能的标记集合1i P 对所有的i 来说都是L ,换句话说,所有节点的初始标记是所有可能的标记.在第k 次迭代过程中,标记算法将从“k i P ”中除去无效标记,得到1+k i P .去除标记的依据建立在节点当前标记、该节点与其它节点的关系、各种约束等基础上,因此,每一个处理器都有足够的信息来独立地对其标记集合k i P 进行细化.这样,所有的处理器就有可能同步工作.需要指出,在任一时刻,处理器只使用能直接可得到的信息,这就是说,只使用从属于该节点对应区域的信息.但是,每一次迭代都通过它的邻节点或关联节点把效应传播给其它没有直接关系的节点,即每一次迭代都会增加节点的影响圈.
194
图7 并行传播示意图
对大多数应用来说,在标记过程开始前,有关物体的一些知识是可以得到的.分割或标记前进行的其它处理过程又常常可以提供用于细化节点初始集合P i 的知识.标记过程可以进一步细化这些标记集合,以使得每一个区域对应唯一的标记.下面考虑一种与上面所述的标记问题稍微不同的标记问题.基于某种酉关系,标记集合1i P 可以分配给一个区域。为了确定标记分配正确与否,给每个标记1i k P l ∈ 确定一个置信度.这个置信度和概率一样,表示了一种信任度,即基于图像提供的证据给某个区域分配某个标记的置信度.因此,对每个元素i k P l ∈,一个非负概率ik p 表示标记k l 是节点i 的正确标记的置信度.
标记过程实际上是使用约束来细化每个标记的置信度.置信度ik p 受连通节点标记的
置信度影响,这样,在第t 次迭代中,节点i 的标记k l 的置信度t ik p 是置信度1-t ik p 和所有
直接有关的节点标记的置信度函数.在每一次迭代中,一个节点受制于其它所有有关节点的标记,然后使用已知约束来更新该标记的置信度.标记过程的结束有两种情况,一种是当每个节点都有一个唯一的标记,另一种是置信度达到一个稳定的状态.
上面的过程通常称为松弛标记过程,即依据局部的证据决定哪一种可能的解释是正确的.尽管使用的证据是局部的,但最终的解释结果在全局范围内是正确的.在每次迭代中,一个标记的置信度只受直接关联的节点的影响.但是,这种影响在后面的迭代中会传播给其它的节点,并且,随着迭代的深入,影响的范围也增大.在松弛标记中,约束是通过相容性函数来确定的.假设区域对应的物体i O 和j O 由ij R 相联系,并在这种联系下标记L i k 和l j L 分配给i O 和j O 的可能性最大.此时,k i L 对应i O 将增大l j L 对应j O 的可能性.同样也有可能利用某些标记的不相容性来降低一个标记的置信度.
下面,我们讨论使用松弛标记技术来确定图像中视差值的一个算法.在本章后面要讨论的确定光流的算法,也是松弛标记方法的一个例子.
(2) 视差计算松弛标记法
195
匹配问题就是把第一幅图像中的点),(i i i y x p =与第二幅图像上的点),(j j j y x p =对应起来.这两点之间的视差是两点之间的位移矢量:
),(j i j i ij y y x x d --= (7)
匹配的两个点称为共轭对.
在匹配过程中可能用到如下三个性质:
离散性:各点之间明显区别的测度.
相似性:两个点之间相似程度的测度.
一致性:一个匹配点与邻近其它匹配点变化一致程度的测度.
离散性是指特征必须是一个个孤立的点.例如,线段就不是一个好的特征,因为一个点能匹配线段上的许多点.离散性将图像视差分析问题退化成有限数量点的匹配问题,因此,离散性把搜索的成本降到了最低程度.
潜在匹配点的集合可以形成一个双向联接图,匹配问题就是从中选择一种联接图.最初每个节点都可认为与其它每个节点都有一个匹配联接,如图8 所示.使用某一判据,对应问题的目标就是求每一个节点对应的一个匹配而去除所有其它的联系.相似特性是指两个潜在的匹配点相互接近的程度,这是一个关联性的测度.相似性可以在所选离散特征点的任何性质基础上进行测量.
图8 (a)图是一个完全的双向图.A 组的每一个节点与B 组的每一个节点相联接.使用
节点(点)的特征和其它一些知识,对应性算法将给每一个节点只保留一个联接,而消除所有其它的节点,如图(b)所示
假设物体的运动特性良好,则一致性意味着场景中表面的空间连续性.一致性判据可以实现显而易见的匹配,改善了对复杂匹配的分析.一些点之间有着足够的分类特征和相似特征,很容易对其进行匹配;这样的匹配在邻近点匹配过程中是十分有用的. 使用角点检测器或特征检测器可以从图像中检测出离散特征点.Moravec 兴趣算子就是这样一种特征检测器.这个算子可以检测那些至少在一个方向上光强值迅速改变的点.算子执行的步骤如下:
1. 用一个5× 5的窗口计算四个方向(水平、垂直和两个对角线方向)上像素差平方和.
2. 计算出这些方差的最大值.
3. 抑制所有非局部最大值的点.
4. 用一个阈值来去除弱特征点.
任何特征检测器都可用来取代上面的算子.如计算每一点的曲率值并选择高曲率值作为特征.
接下来的工作是对第一幅图像中的每个特征点与第二幅图像中的所有特征点在最大距离范围内进行配对.这将消除完全双向图中的许多联接.那些消除掉的是两图像中差别很大的点之间的联接,因为,它们不可能成为候选匹配点.每一个节点a i 包含第一幅
196
图像中的一个位置(,)x y i i 和一组可能的标记(视差矢量).一组视差标记是一组位移矢量或是未定义的视差.
匹配的初始概率通过使用两图像特征点之间的相似测度来计算.人们一般使用对应窗口中所有像素差的平方和s i 为测度.
下面的步骤可以用来给这些概率赋值.设l 是一个点的一个候选标记,表示该点的一个视差向量.我们先计算)(l w i ,即点),(i i y x 与其潜在匹配点之间的相似度:
)
(11)(l cs l w i i += (8) 式中s l i ()是对应于标记l 的视差平方和,c 是一个正的常数.这个点不足以定义视差的概率是:
))(max(10l w p i i -= (9)
这个概率值是由与(,)x y i i 最相似点的相似度来确定的.如果没有很强的相似点,那么有可能这个点在这图像中就没有匹配.各个匹配(标记)点的概率是
∑
'=)()()|(l w l w i l p i i i (10) 式中)|(i l p i 是条件概率,a i 节点具有标记l ,求和是不包含“未定义”标记的所有标记'l .使用一致性和迭代松弛算法可以使概率估计逐渐精细.在这个算法中,每个节点上的标记是加强还是减弱,是以本次迭代中相邻节点的标记为基础的.这里使用的最重要的性质是在给定的邻域中,所有的视差都是相似的.这样,邻域中具有相似视差的节点相互加强,而视差不相似的节点则被减弱了.下面的方法可以来实现这一思想. 让我们考虑点a i 所有邻点的视差矢量概率.对每个邻点,将那些与a i 的视差相近或相似的标记(视差)概率加起来:
∑∑'=i i
A D k j l i l p l q )()( (11) 其中i A 是a i 的所有邻点的集合,i D 是与a i 视差相似的那些标记的集合.现在使用迭代计算来逐渐精细概率值:
))(()(1l Bq A p l p k i k i k i +=+ (12)
其中常量A 和B 用来控制算法的收敛速度.通常,只进行几次迭代就能得到一个好的解.另外,去掉低概率值的匹配点可以有效地提高算法的速度.图9示意的是一个序列中的两幅图像,图10是使用上面算法计算视差的迭代过程示意图.有兴趣的读者可以参见文献[Barbard 1980].
197
图 9 立体图像对
图10使用松弛算法求匹配特征点视差示意图,(a) 对图9进行
初始概率分配,(b) 、(c)和(d)是第2、第6和第10次迭代结果 2 光流法
光流法是运动图像分析的重要方法.本节首先介绍光流的基本概念和图像运动估计的基本问题,然后讨论光流方程,基于光流方程的一些图像分析方法和算法见3节。
2.1 运动场与光流
给图像中的每一像素点赋予一个速度向量,就形成了图像运动场(motion field). 在运动的一个特定时刻,图像上某一点i p 对应三维物体上某一点0P ,这种对应关系可以由投影方程得到.在透视投影情况下,图像上一点与物体上对应一点的连线经过光学中心,该连线称为图象点连线(Point ray),如图11所示
198
图11 三维物体上一点运动的二维投影
设物体上一点0P 相对于摄像机具有速度0v ,从而在图像平面上对应的投影点i p 具有速度i v .在时间间隔t δ时,点0P 运动了t δ0v ,,图像点i p 运动了t i δv .速度可由下式表示: dt
d dt d i i r v r v ==
00 (13) 式中0r 和i r 之间的关系为: 00?11r z
r r ?='i f (14) 其中,'f 表示图像平面到光学中心的距离,z
?表示z 轴的单位矢量. 式(14)只是用来说明三维物体运动与在图像平面投影之间的关系,但我们关心的是图像亮度的变化,以便从中得到关于场景的信息。
当物体运动时,在图像上对应物体的亮度模式也在运动.光流(optical flow)是指图像亮度模式的表观(或视在)运动 (apparent motion)[Horn 1986].使用“表观运动”这个概念的主要原因是光流无法由运动图像的局部信息唯一地确定,比如,亮度比较均匀的区域或亮度等值线上的点都无法唯一地确定其点的运动对应性,但运动是可以观察到的.与光流同义的另一个常用术语是图像流(image flow).
在理想情况下,光流对应于运动场,但这一命题不总是对的.图12所示的是一个非常均匀的球体,由于球体表面是曲面,因此在某一光源照射下,亮度呈现一定的空间分布或叫明暗模式.当球体在摄像机前面绕中心轴旋转时,明暗模式并不随着表面运动,所以图像也没有变化,此时光流在任意地方都等于零,然而,运动场却不等于零.如果球体不动,而光源运动,明暗模式运动将随着光源运动.此时光流不等于零,但运动场为零,因为物体没有运动.一般情况下可以认为光流与运动场没有太大的区别,因此允许我们根据图像运动来估计相对运动.
199
图12 光流与运动场差别示意图 2.2 光流约束方程
设),,(t y x I 是图像点),(y x 在时刻t 的照度,如果),(y x u 和),(y x v 是该点光流的x 和y 分量,假定点在t t δ+时运动到),(y y x x δδ++时,照度保持不变,其中,
t u x δδ=,t v y δδ=,即
),,(),,(t y x I t t t v y t u x I =+++δδδ (15)
这一约束还不能唯一地求解u 和v ,因此还需要其它约束,比如,运动场处处连续等约束.
如果亮度随x 、y 、t 光滑变化,则可以将上式的左边用Taylor 级数展开,
),,(),,(t y x I e t
I t y I y x I x t y x I =+??+??+??+δδδ (16) 其中e 是关于x δ、y δ、t δ的二阶和二阶以上的项.上式两边的),,(t y x I 相互抵消,两边除以t δ,并取极限0→t δ,得到
0=??+??+??t
I dt dy y I dt dx x I (17) 上式实际上是下式的展开式
0=dt
dI (18) 设
x I I x ??= y
I I y ??= t I I t ??= dt dx u = dt
dy v = 则由式(17)得到空间和时间梯度与速度分量之间的关系:
0=++t y x I v I u I (19)
或
0=+??t I v I (20)
上述方程称为光流约束方程.在上面的方程中,x I ,y I 和t I 可直接从图像中计算出来.
200
实际上,上述光流约束方程产生的是恒值亮度轮廓图像运动的法向分量n v s n =,其中n 和s 分别是法向运动分量的方向和大小:
I
I I
n ?-=??=t I s (21) 图像中的每一点上有两个未知数u 和v ,但只有一个方程,因此,只使用一个点上的信息是不能确定光流的.人们将这种不确定问题称为孔径问题(aperture problem).理论上分析,我们仅能沿着梯度方向确定图像点的运动,即法向流(normal flow).假定物体的运动方向为r ,如图12所示.如果基于一个局部窗口(即孔径1)来估计运动,则无法确定图像是沿着边缘方向还是垂直边缘方向运动,其中沿着垂直边缘方向的运动就是法向流.但是,如果我们再来观察孔径2,就有可能确定正确的运动,这是由于图像在孔径2中的两个垂直边缘方向上都有梯度变化.这样,在一个包含有足够灰度变化的像素块上有可能估计图像运动.当然,这里隐含着一个假设,那就是像素块里的所有像素都具有相同的运动矢量.
图13 孔径问题示意图
3光流计算
由上节讨论可知,由于孔径问题的存在,仅通过光流约束方程而不使用其它信息是无法计算图像平面中某一点处的图像流速度,本节将讨论如何克服孔径问题,并求出图像流的几种方法。
3.1 Horn-Schunck 法
Horn 和Schunck[Horn]使用光流在整个图像上光滑变化的假设来求解光流,即运动场既满足光流约束方程又满足全局平滑性.根据光流约束方程,光流误差为
()22)(t y x I v I u I e ++=x (22)
其中T y x ),(=x 。对于光滑变化的光流,其速度分量平方和积分为 dxdy y v v y s ?????
????????? ??+??? ??+???? ??+??? ??=22222x u x u )(????????x (23) 将光滑性测度同加权微分约束测量组合起来,其中加权参数控制图像流约束微分和光滑性微分之间的平衡:
201 {}
dxdy s e E ??+=)()(22x x α (24) 其中α是控制平滑度的参数,α越大,则平滑度就越高,则估计的精度也越高.使用变分法将上式转化为一对偏微分方程: t y y y x t
x y x x I I v I u I I v I I v I I u I u ++=?++=?2222αα (25)
用有限差分方法将每个方程中的拉普拉斯算子换成局部邻域图像流矢量的加权和,并使用迭代方法求解这两个差分方程.
下面只考虑离散的情况.在一点),(j i 及其4邻域上,根据光流约束方程,光流误差的离散量表示式为:
()22),(),(),(t y x I j i v I j i u I j i e ++= (26)
光流的平滑量也可由点),(j i 与它的4邻域点的光流值差分来计算: [
]2
22
2222
22))1,(),(()),()1,(()),(),1((),1(),(())1,(),(()),()1,(()),(),1((),1(),((4
1),(--+-++-++--+--+-++-++--=j i v j i v j i v j i v j i v j i v j i v j i v j i u j i u j i u j i u j i u j i u j i u j i u j i s (27) 则极小化函数为:
∑∑+=i j j i s j i e
E )),(),((22α (28)
E 关于u 和v 的微分是:
)(2)(2)(2)(2v v I I v I u I v
E u u I I v I u I u E y t y x x t y x -+++=??-+++=??αα (29) 其中u 和v 分别是u 和v 在点),(j i 处的平均值.当上式为零时,则式28取极小值,因此得到:
)()(0
)()(=-+++=-+++v v I I v I u I u u I I v I u I y t y x x t y x αα (30) 从上面两个方程可以求出u 和v .实际中,经常将求解u 和v 表示成迭代方程:
221221y x t n y n y
n n y
x t n y n x x n n I I I v I u x I I v v I I I v I u I I u u ++++-=++++-=++αα (14.31) 其中n 是迭代次数,0u 和0v 是光流的初始估值,一般取为零.当相邻两次迭代结果的距离
小于预定的公差值,迭代过程终止. Horn-Schunck 光流法实验结果见图15。
3.2 Lucas-Kanade 方法
Lucas 和Kanade[Lucas 1981] 假设在一个小的空间邻域Ω上运动矢量保持恒定,然后使用加权最小二乘方( weighted least-squares)估计光流。在一个小的空间邻域Ω上, 光流估计误差定义为
∑Ω∈++),(22))((y x t y x I v I u I W x (32)
202
其中)(x W 表示窗口权重函数,它使邻域中心部分对约束产生的影响比外围部分更大。设T v u ),(=v ,T y x I I ),()(=?x I 式(32)的解由下式给出:
b W A Av W A 22T T =
(33)
其中,在时刻t 的n 个点Ω∈i x , .
))(,),(()],(,),([,
)](,),([111T n t t n T n I I W W diag x x b x x W x I x I A -==??=
式(33)的解为b W A A]W A v 212[T T -=,其中当A W A 2T 为非奇异时可得到解析解 ,因为它是一个22?的矩阵:
???????
?=∑∑∑∑)()()()()()()()()()(2222222x x x x x x x x x x A W A y x y y x x T I W I I W I I W I W (34)
其中所有的和都是在邻域Ω上的点得到的。 等式(32)和(33)也可认为是从法向速度(normal velocities)n v s n =得到的估计v 的加权最小二乘估计(weighted least-squares estimates);即(32)等于:
∑Ω∈-?x (x)n(x)v x x 222])[()(s w W (35)
我们的实现首先用标准差为1.5像素/帧的时空高斯滤波器平滑图象序列。 这有助与削弱时间噪声(temporal aliasing)和输入中的量化效应(quantization effects)。梯度的计算使用了4点中心差,其系数模板为12/)18081(--。空间邻域Ω为55?像素大小,窗口权重函数)(2x W 为可分离的和各向同性的 ;在[Simoncelli 1991]中的有效的一维权为)0625.025.0375.025.00625.0(。在整个处理中需要15帧图象。Fleet and Langley
[Fleet 1993]已经用IIR 递归滤波器和时间上的递归估计替代了FIR 滤波器。这种方法只需存储3帧图象 (即只有2到3帧的延迟)就可产生相似的结果。
Simoncelli 等在[Simoncelli 1991]中提出了一个(32)的贝叶斯透视图(Bayesian perspective)。他们在梯度测量中使用高斯分布误差(Gaussian distributed errors)和高斯分布的先验速度V 来模拟光流约束方程(17)。 最大化一个后验解的结果与式(33)相似 ,并且产生一个速度估计的协方差矩阵。 我们发现这种修改不会明显的改变准确性,但它提出了使用A W A 2T (λλ12≥)的特征值来鉴别不可靠的估计,该值依赖于空间梯度的数量和方向的范围。虽然Simoncelli 等建议使用特征值的和,但我们发现单个的最小特征值更加可靠一些。因此在我们的实现中,如果λ1和λ2都大于一个阈值τ,V 用(33)计算;如果λτ1≥而λτ2<,计算法向速度估计;如果λτ1<,不计算速度。
3.3 Nagel 方法
Nagel 使用二阶导数(second-order derivatives)来估计光流[Nagel 1983, 1987, 1989]。和Horn-Schunck 法一样,Nagel 也使用了全局平滑约束来建立光流误差测度函数,与
Horn-Schunck 测度函数(24)不同,Nagel 提出的一种面向平滑的约束(oriented-smoothness constraint ),并不是强加在亮度梯度变化最剧烈的方向(即边缘方向)上,这样做的目的是为了处理遮挡(occlusion)问题[Nagel 1986]。 该方法的误差测度函数为
dxdy
v v u u I v I v I u I u I I v I u I y x y x x y y x x y y x t y x )]()()[(2)(2222222
22
2++++-+-+?+++??δδα (36)
相对于v 求上式的极小化会削弱垂直于梯度方向上的光流变化。[Nagel 1987]建议取δ=1.0,
203
α=0.5。
使用Gauss-Seidel 迭代,(36)的解可表示为:
22212221]
)()([)(])()([)(αξξξαξξξ++++-=++++-
=++y x t k y k x y k k y x t k y k x x k k I I I v I u I I v v I I I v I u I I u u (37)
其中,k 表示迭代次数,ξ()u k 和ξ()v k 由下式给出:
)
(2)()
(2)(k T xy y x k k k T xy y x k k v v I I v v u u I I u u ?--=?--=q q ξξ (38)
其中: ???
????????? ??+???? ??--?++=W I q yy xy xy xx xx xy xy yy T y x I I I I I I I I I I 22122σ u xy
k 和v xy k 表示k v 的偏导数的估计,u k 和v k 是u k 和v k 的局部邻域的平均,W 加权矩阵: ???
? ??---+++=-δδδ22122)2(x y x y x y y x I I I I I I I I W 在实现中,所有的速度初值都可设为0。图象序列使用了一个在时空上标准差均为1.5像素的高斯核进行滤波预处理。亮度导数使用4点中心差算子计算,在不同的方向上层叠以得到另一个导数(second derivatives)。一阶速度导数用2点中心差核)5.0,0,5.0(-计算,而二阶导数通过层叠一阶导数计算而得。图15所示的是使用了100次迭代得到的光流结果结果。关于实现的细节可参考[Barron 1993]。
(a) 第一帧 (b)第二十帧
图14 兵马俑模型图像序列
204
图15 光流实验结果, (a) Horn-Shrunck 法, (b) Lucas-Kanade 法,(c) Nagel 法
3.4鲁棒计算方法
显然,光流约束方程21不适用遮挡背景的运动过程,也就是说,在运动边界处的运动信息是不可靠的,即可能产生不正确的运动点或局外点.鲁棒计算方法可以避免边界处不正确运动约束带来的问题.
图像流可用最小中值二乘回归法这一鲁棒回归算法来计算.将最小中值二乘法作用于连接的各个邻域.在每一个邻域里,该算法将尽可能找出所有可能的约束线对.计算每一对约束线的交点,并计算残差平方的中值,以便给每一个估计值指定一个权值.然后,将每一个交点及其权值都存储起来.在试过所有的约束线对以后,对应于最小权值的交点作为邻域中心图像流速度的估计.
使用约束线在速度空间的距离d 和图像梯度角α,可将约束线表示为极坐标形式:
)cos(βαρ-=d (14.39)
式中),(y x ρ和),(y x β分别表示运动的速度大小和方向.设第一条约束线的坐标为d 1和α1,第二条约束线的坐标为2d 和2α.在直角坐标系中交点的位置是
)
sin(cos cos )
sin(sin sin 212112
211221
αααααααα--=--=d d y d d x (14.40)
该模型对约束线的拟合度是残差平方的中值: )(2i i
r med (14.41)
205
运动估计和每条约束线之间的残差r 是约束线与估值点(x,y)间的垂直距离.残差由下式给出
ααsin cos y x r += (14.42)
由方程(40) 给出的约束线对的交点位置是一个候选解.计算并存储相对于候选解的约束线残差平方的中值,连同候选解一起作为一个潜在解.残差平方的中值是邻域中每一条线与候选交点间垂直距离的平方中值.
典型的邻域尺寸是5× 5.一个n ×n 的邻域包含了n 2
条约束线.那么n ×n 邻域里可能的约束线对数是 2
)1(22-n n (43) 一个55?邻域会产生300对线.如果计算时间有限,则没有必要试验所有的线对.Rousseeuw 和Leroy [Rousseeuw 1987, p198]提供了一个试验次数表,给出在95%置信度下,用p 个参数的模型拟合含有不同比例局外点的数据集的最小实验次数,其中假定邻域里至多有50%的局外点.图像流速度场的局部估计仅需要两条约束线.从Rousseeuw 和Leroy 给出的表中可以看到,只需要试验11对约束线就能提供具有95%置信度的一致性估计.使用更多的线对可能会给计算一致性估计的增加麻烦.如果使用的线对数量少于所有可能的线对,则必须对线对进行挑选,以使每对线中的约束离的越远越好.这就减少了因求解相近方向约束线交点带来的病态问题.在每一个邻域里应该使用一个预编程方案,以便选择约束线对.这种方法的实验结果如图16所示.
图16 使用最小中值二乘算法的进行光流计算的实验结果
4 基于块的运动分析
基于块(Block-based))的运动分析在图像运动估计和其它图像处理和分析中得到了广泛的应用,比如在数字视频压缩技术中,国际标准MPEG1-2采用了基于块的运动分析和补偿
206
算法.块运动估计与光流计算不同,它无需计算每一个像素的运动,而只是计算由若干像素组成的像素块的运动,对于许多图像分析和估计应用来说,块运动分析是一种很好的近似.
4.1 块运动模型
基于块的运动模型假设图像运动可以用块运动来表征.块运动通常分为平移、旋转、仿射、透视等运动形式,一般情况下,块运动是这些运动的组合,称为变形运动(deformation motion).
(1) 平移运动
假设图像中每一个块都作平移运动.在第k 帧图像中选取一个块B ,其中心位于),(y x .在第1+k 帧时,块B 的所有像素之间的关系及其灰度值保持不变,但块中心运动到),(y x '',将第k 帧到第1+k 帧的平移变换公式表示为
y
y y x x x ?+='?+=' (44) 则对块中所有的像素,有
B y x t y y x x f t y x f k k ∈?+?+=+),()
,,(),,(1 (45)
(2)仿射运动
将上面的平移变换推广到包含仿射坐标的变换: 12
1110020100a y a x a y a y a x a x ++='++=' (14.46) 该式不仅可以描述块的平移、旋转运动,还表示块的变形运动如图17所示.仿射变换表示一个平面的三维运动在图像平面上的平行投影 ,它有一个重要的性质就是平面上任意两条直线,经仿射变换后,仍然保持平行.
(3)透视投影变换
1121201211102120020100++++=
'++++=
'y a x a a y a x a y y a x a a y a x a x (47) (4)二次线性变换形式
13
12111003020100a xy a y a x a y a xy a y a x a x +++='+++=' (14.48) 这些方法可以解决光流的孔径问题.
块的平移运动具有广泛的应用,主要原因是它无需向光流那样,计算每一个像素的运动,而是只计算一个块的运动,这种计算对于许多应用都是一种很好的近似,同时计算极其简单和有效,非常适合于VLSI 并行处理.但这种算法不适合旋转运动、图像的缩放运动和图像局部变形运动.
207
图17 几种空间变换示意图
4.2 傅里叶方法
采用傅里叶变换可以检测和估计运动块的二维平移、旋转和尺度变化.
(1)平移运动的检测
对方程(45)的两边取傅里叶变换:
)},,({Φ),(k k k t y x f F =ηξ (49)
)]
(2exp[),()](2exp[)},,({Φ)}
,,({Φ),(111y x j F y x j t y x f t y y x x f F k k k k k k ?+?-=?+?-=?+?+=+++ηξπηξηξπηξ (50)
时刻k t 和1+k t 对应的两帧图像二维傅里叶相位差为
)
(2),(),(),(1y x F F k k ?+?-=∠-∠=?+ηξπηξηξηξ? (51) 上式实际上是一个由两个变量),(ηξ定义的一个平面.所以估计块的运动矢量就是估计该平面的法线方向),(y x ??.下面介绍一种求解),(y x ??的直接方法.由变量的可分离性,),(k x t x f 和),(1+k x t x f 分别表示),,(k t y x f 和),,(1+k t y x f 在x 轴的投影,即
∑∑++==
y k k x y k k x t
y x f t x f t y x f t x f ),,(),(),,(),(11 (52)
),(ηξk F 和),(1ηξ+k F 分别为),(k x t x f 和),(1+k x t x f 的傅里叶变换,则它们的相位差为:
x
F F k k x ?-=∠-∠=?+πξξξξ?2)
()()(1 (53) 在频率域,可以得到关于ξ的)(ξ??,从上式可解得x ?
208 πξ
ξ?2)(x x ?-
=? (54) 同理可以求出y ?: πηη?2)
(-y y ?=? (55)
这样),(y x ??就是时刻k t 到1+k t 图像块运动的位移量.
上述直接方法有两个假设:
1. 二维相位函数(51)是可以展开的
2. 所选的图像块内只包含一个物体.
第一个假设在实际中一般很难做到.对于第二个假设,如果机器自动地在图像上选择运动块,如果块中包含有两个物体,则估计结果将是错误的.4.3将介绍的相位相关法可以有效地解决上述两个问题.
(2) 旋转运动和尺度变化的检测
由傅立叶方法可知,对于图像的空间域线性模式,如直的边缘,经傅立叶变换后,它的功率谱也呈线性分布,且通过),(ηξ平面的原点,它的方向与图像空间域上的线性模式方向正交。这样当线条旋转时,其线性功率谱也做相应的旋转,由此求出二维旋转运动。如果物体图像的尺度变大,反映在傅立叶频率域上的功率谱的低频分量增大,反之,若物体区域尺寸变小,那么频率域上的功率谱的高频分量增大。这样可以根据功率谱的变化描述物体尺度的变化。
4.3 相位相关法
图像序列中的k t 和1+k t 时刻的图像之间互相关函数为
),,(),,(),(11,++*=k k k k t y x f t y x f y x c (56)
对上式两边做傅里叶变换,得到互功率谱为:
),(Φ),(Φ),(1k 1,ηξηξηξ++=k k k C (57)
上式除以互功率谱幅值得到标准互功率谱
),(Φ),(Φ),(Φ),(Φ),(~1
k 1k 1,ηξηξηξηξηξ+++=k k
k k C (58) 将51代入上式,则有
)](2exp[),(~1,y x j C k k ?+?-=+ηξπηξ (59) 对上式取傅里叶反变换,得到相位相关函数表达式: ),(),(~1
,ηξδ--=+y x y x c k k (60) 由上式可见,相位相关函数是一个脉冲函数,其脉冲位置就是块位移矢量.
求解位移矢量算法见算法14.1.用计算机实现上述算法时,要用二维离散傅里叶变换(DFT)替换二维傅里叶变换.
算法1 相位相关法运动矢量算法
1. 计算第k t 和1+k t 时刻对应的图像中块的二维DFT .
2. 根据式(58)计算互功率谱相位. 3. 计算),(~
1,ηξ+k k C 的逆的二维DFT ,得到),(~1
,y x c k k +. 4. 检测相位函数的峰值位置.
理想情况下得到的相位相关函数只有一个峰值,对应着块在两帧图像上的相对位移.但在实际中,许多因素常常会使相位相关函数恶化,从而有可能产生多个峰值.这些因素包括使用二维DFT 替换二维傅里叶变换,一个块内有两个运动物体,或图像噪声等.
通用二维运动平台设计
通用二维运动平台设计 通用二维平台是许多机电一体化设备的基本部件,如数控车床的纵-横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光设备的工作台、电子元件表面贴装设备等。根据设计要求的工作载荷,通过计算和校核,进行导轨副、滚珠丝杠螺母副和伺服电动机等的选型,在满足性能的要求下,以成本最低为原则,满足工作要求的需要,能稳定完成生产任务。 本次机械装配图采用国产软件CAXA进行绘制,通过提取图符操作调用标准零件,因而能够较快的绘制机械装配图。电气原理图采用Protel99Se绘制。 关键词:运动平台;滚珠丝杠;计算;绘图
目录 第一章二维运动平台总体方案设计 (1) 第二章二维运动平台进给伺服系统机械部分设计计算 (2) 2.1 确定系统脉冲当量 (2) 2.2 确定系统切削力 (2) 2.3直线滚动导轨副的计算与选型 (3) 2.4 滚珠丝杠螺母副的计算和选型 (3) 2.5 计算减速比i (6) 2.6步进电动机的计算和选型 (7) 第三章微机数控硬件电路设计 (11) 3.1 MCS—51系列单片机简介 (12) 3.1.1 MCS—51系列指令系统简介 (12) 3.1.2 定时器/计数器 (12) 3.1.3 中断系统 (14) 3.2 存储器扩展电路设计 (13) 3.2.1 程序存储器的扩展 (13) 3.2.2 数据存储器的扩展 (14) 3.2.3 译码电路设计 (16) 3.3 I/O接口电路及辅助电路设计 (18) 3.3.1 8255 通用可编程接口芯片 (18) 3.3.2 键盘显示接口电路 (20) 3.3.3 电机接口及驱动电路 (21) 3.3.4 辅助电路 (23) 参考文献 (24)
运动估计算法比较
大作业 几种运动估计算法比较 一、实验内容 简要介绍各种运动估计算法,并比较不同运动估计算法的性能,主要考虑各算法的运算速度和精度。 二、实验背景 视频原始图像中存在着大量的信息冗余,如时间冗余、空间冗余、信息熵冗余、谱间冗余、几何结构冗余、视觉冗余和知识冗余等等。运动估计是视频压缩编码中的核心技术之一,采用运动估计和运动补偿技术可以消除视频信号的时间冗余以提高编码效率。如何提高运动估计的效率,使运动估计算法的搜索过程更健壮、更快速、更高效成为目前研究的热点。 运动估计的基本思想是尽可能准确地获得序列图像帧间的运动位移,即运动矢量。因为运动估计越准确,预测补偿的图像质量越高,补偿的残差就越小,补偿编码所需位数越少,需要传输的比特率就越小。利用得到的运动矢量在帧间进行运动补偿。补偿残差经过变换、量化、编码后与运动矢量一起经过熵编码,然后以比特流形式发送出去。 运动估计算法多种多样,大体上可以把它们分成四类:块匹配法、递归估计法、贝叶斯估计法和光流法。其中块匹配运动估计算法因其具有算法简单、便于VLSI实现等优点得到广泛应用。所以本文将重点介绍块匹配运动估计算法,并对各种块匹配算法在计算速度和估计精度上进行简单比较。 三、实验原理 (一)、像素递归技术 像素递归技术是基于递归思想。在连续帧中像素数据的变化是因为物体的移位引起的,郑么如果沿着梯度方向在某个像素周圈的若干像素作迭代运算,运算会最后收敛于一个固定的运动估计矢量,从而预测该像素的位移。 (二)、块匹配运动估计 块匹配运动估计是把图像帧划分为若干互不重叠的块,并以块为单位寻找目标帧中每块在参考帧(上一帧或者其它帧)中最优匹配的块的相对位置,假设图像中每块的大小为M
二维平台综合实验
实验一二维平台综合实验 机电一体化概念 机电一体化是利用计算机的信息处理功能对机械进行各种控制的技术。可以毫不过分的说,当今世界上各种灵巧便利的机械,都是基于机电一体化技术制造的。此外,机电一体化技术在家用电器、各种车辆、医疗器械、工厂、游乐园等各种领域、场所都得到了广泛的应用。 现在,中国正在经历着前所未有的巨大变革。中国在进行改革开放的20多年里,适逢以电子制造业为基础的信息产业迅速发展,媒体不厌其烦的宣传中国面向信息产业的人才培养滞后,因此出现了现在接受高等教育的优秀青年不约而同地选择信息和计算机科学,而使本来就基础薄弱的制造业更加呈现人才不足的危险状况。这样一来,硬件技术和软件技术的不平衡,必将导致对两者都不利的严重后果。 为了适当扭转这种局面,必须使接受高等教育的学生理解机电一体化,并对其有兴趣。在此基础上,在进一步研究和提高制造技术,这就是本教材的编写目的 机电一体化(mechatronics)一词是机械和电子两个词的合成词,20世纪70年代中期由日本首先开始使用,很快便得到欧美各国的普遍认同,并得到广泛使用。但迄今为止,其精确定义尚不明确,但从广义上可简要概括为“机械工程与电子工程相结合的技术,以及应用这些技术的机械电子装置。表1是根据该定义对机电一体化应用的分类和举例。 表1 机电一体化实例 应用举例 原来由机械机构实现动作的装置,通过与电子技术相结合来实现同样运动的新的装置。发条式钟表 -> 石英钟表 手动照相机 -> 自动(微机控制)照相机机械式缝纫机 -> 电动(电子式)缝纫机机械式调速器 -> 电子式调速器 原来由人来判断决定动作的装置变为无人操作的装置自动售货机,自动出纳机(ATM),自动售票机,邮局自动分检机,无人仓库,船舶和飞机的自动导航装置等。 按照人编制的程序来实现灵活动作的装置数控机床,工业机器人,智能机器人,各种机器人等 如上所述,机械工程学科和电子工程学科是机电一体化的两个支柱。但除此之外,机电一体化还是控制工程和信息工程学科等的多学科综合技术。图1是构成和支撑机电一体化的学科和技术。
教科版物理必修2 第二章 第2节 匀速圆周运动的向心力
(答题时间:30分钟) 1. 如图所示,内壁光滑的圆锥筒的轴线垂直于水平面,圆锥筒固定不动,让两个质量相同的小球A和小球B,紧贴圆锥筒内壁分别在水平面内做匀速圆周运动,则() A. A球的线速度一定大于B球的线速度 B. A球的角速度一定大于B球的角速度 C. A球的向心加速度一定大于B球的向心加速度 D. A球对筒壁的压力一定大于B球对筒壁的压力 2. 质量为m的小球由轻绳a和b分别系于一轻质木架上的A点和C点,如图所示,当轻杆绕轴BC以角速度ω匀速转动时,小球在水平面内做匀速圆周运动,绳a在竖直方向,绳b在水平方向,当小球运动到图示位置时,绳b被烧断且杆子停止转动,则() A. 小球仍在水平面内做匀速圆周运动 B. 在绳b被烧断瞬间,a绳中张力突然增大 C. 若角速度ω较小,小球在垂直于平面ABC的竖直平面内摆动 D. 若角速度ω较大,小球可能在垂直于平面ABC的竖直平面内做圆周运动 3. 如图,物体m用不可伸长的细线通过光滑的水平板间的小孔与砝码M相连,且正在做匀速圆周运动,若减少M的质量,则物体m的轨道半径r,角速度ω,线速度v的大小变化情况是() A. r不变,v减小 B. r增大,ω减小 C. r增大,v减小 D. r减小,ω不变 4. 如图所示,长为L的细绳一端固定,另一端系一质量为m的小球。给小球一个合适的初速度,小球便可在水平面内做匀速圆周运动,这样就构成了一个圆锥摆,设细绳与竖直方向的夹角为θ。下列说法中正确的是()
A. 小球受重力、细绳的拉力和向心力作用 B. 小球受重力、细绳的拉力的作用 C. θ 越大,小球运动的线速度越大 D. θ 越大,小球运动的线速度越小 5. 如图所示,在光滑水平面上,质量为m 的小球在细线的拉力作用下,以速度v 做半径为r 的匀速圆周运动。小球所受向心力F 的大小为( ) A. r v m 2 B. r v m C. mvr D. mvr 2 6. 下列关于物理量的说法中正确的是( ) A. 速度大小和线速度大小的定义是相同的 B. 做圆周运动的物体,其加速度和向心加速度是一样的 C. 加速度的方向与速度变化的方向总是一致的 D. 地球赤道表面物体随地球自转所需向心力与此物体所受重力是一样的 7. 如图所示,在匀速转动的水平圆盘上,沿半径方向放着用细线相连的质量相等的两个物体A 和B ,它们与盘间的动摩擦因数相同,当圆盘转速加快到两物体刚要发生滑动时,烧断细线,则( ) A. 两物体均沿切线方向滑动 B. 物体B 仍随圆盘一起做匀速圆周运动,同时所受摩擦力减小 C. 两物体仍随圆盘一起做匀速圆周运动,不会发生滑动 D. 物体B 仍随圆盘一起做匀速圆周运动,物体A 发生滑动,离圆盘圆心越来越远 8. 如图所示,一个质量为m 的小球用一根长为l 的细绳吊在天花板上,给小球一水平初速度,使它做匀速圆周运动,小球运动所在的平面是水平的。已知细绳与竖直方向的夹角为θ,重力加速度为g 。求:
三维运动模拟平台总体设计
三维运动模拟平台总体设计 为实现对某型光电跟踪器的动态跟踪性能的测试,设计了一种可以实现方位、俯仰和垂直直线运动的模拟运动平台,角位置精度达到15″,线位置精度达到0.01mm。 标签:运动模拟;结构设计;机构设计 1 引言 动态角跟踪精度检测装置由被试系统、多波段点源目标发生器系统(以下简称“目标发生器”)、运动模拟平台及总控制系统四个部分组成,图1为动态角跟踪精度检测装置系统组成原理框图。其中的运动模拟平台可以完成方位、俯仰和垂直直线运动。 2 目标运动平台 目标运动平台包含圆弧导轨副(含驱动传动机构)、目标固定支撑台面(俯仰U型框)、俯仰/升降二维运动机构、平台三维(俯仰、升降及滑动)伺服驱动系统、平台运动控制系统等5部分组成,图2为运动平台组成框图。 导轨为目标平台的方位运动轨迹,围绕着圆弧导轨的圆心转动,形成方位视线角速度变化;目标固定支撑台面负载目标发生器在进行沿圆弧导轨水平运动的同时,通过俯仰和高低二维运动机构带动目标发生器进行自身的位置运动,形成复合俯仰方位视线角速度变化,进而模拟目标在空域范围内的位置信息,以便对被测系统进行测试及仿真。 2.1 运动平台功能 平台本身具备三个运动自由度,目标发生器安放于运动平台的俯仰框上,平台依据操作者规划的运动路径,带动目标模拟系统形成相对被测试系统的方位、俯仰两个自由运动并保证目标光轴实时指向被测系统成像面中心,模拟真实环境下目标的运动特性,以便被测系统进行跟踪,分述如下。 2.1.1 模拟目标的方位运动 整套设备在以GDX塔的转轴中心为圆心的圆弧导轨上运动,实现方位角度变化的模拟,由于被测系统及圆弧导轨都以GDX塔的转轴中心为圆心,可以实现旋转中心重合,所以可以保证目标在导轨上运动时,被测系统光轴可以始终跟随着目标发生器的光轴,且在某一视场可观测到多波段点源目标; 2.1.2 模拟目标的俯仰运动
教科版物理必修2 第二章 第2节 匀速圆周运动的向心力和向心加速度2 匀速圆周运动的解题技巧(同步练习)
(答题时间:30分钟) 1. 如图所示装置绕竖直轴匀速旋转,有一紧贴内壁的小物体,物体随装置一起在水平面内匀速转动的过程中所受外力可能是( ) A. 重力、弹力 B. 重力、弹力、滑动摩擦力 C. 下滑力、弹力、静摩擦力 D. 重力、弹力、静摩擦力 2. 如图所示是一个玩具陀螺,a 、b 和c 是陀螺上的三个点。当陀螺绕垂直于地面的轴线以角速度ω稳定旋转时,下列说法正确的是( ) A. a 、b 和c 三点的线速度大小相等 B. a 、b 和c 三点的角速度相等 C. a 、b 的角速度比c 的大 D. c 的线速度比a 、b 的大 3. 如图所示,一个小物体沿半径为R 的半圆形轨道由A 点滑向B 点,由于摩擦力的作用,在由A 到B 的过程中,小物体的速率v 没有变.下面的说法中正确的是( ) A. 小物体的加速度不变 B. 小物体所受外力为零 C. 小物体所受合外力大小不变,方向始终指向圆心 D. 合外力大小改变,方向始终不变 4. 如图所示,光滑水平面上,小球m 在拉力F 作用下做匀速圆周运动。若小球运动到P 点时,拉力F 发生变化,关于小球运动情况的说法正确的是( ) A. 若拉力突然消失,小球将沿轨迹Pa 做离心运动 B. 若拉力突然变小,小球将沿轨迹Pa 做离心运动 C. 若拉力突然变大,小球将沿轨迹Pb 做离心运动 D. 若拉力突然变小,小球将沿轨迹Pc 做离心运动 5. 如图所示,有一固定的且内壁光滑的半球面,球心为O ,最低点为C ,在其内壁上有两个质量相同的小球(可视为质点)A 和B ,在两个高度不同的水平面内做匀速圆周运动,A 球的轨迹平面高于B 球的轨迹平面,A 、B 两球与O 点的连线与竖直线OC 间的夹角分别为α=53°和β=37°,以最低点C 所在的水平面为重力势能的参考平面,则(sin 37°=53,cos 37°=5 4)( ) A. A 、B 两球所受支持力的大小之比为4∶3 B. A 、B 两球运动的周期之比为4∶3 C. A 、B 两球的动能之比为16∶9 D. A 、B 两球的机械能之比为112∶51 6. 如图所示,一倾斜的匀质圆盘垂直于盘面的固定对称轴以恒定的角速度ω转动,盘面上离转轴距离2.5m 处有一小物体与圆盘始终保持相对静止,物体与盘面间的动摩擦因数为2 3。设最大静摩擦力等于滑动摩擦力),盘面与水平面间的夹角为30°,g 取10m/s 2。则ω的最大值是( ) A. 5rad/s B. C. 1.0rad/s D. 0.5rad/s 7. 如图一个学生把风刮倒的旗杆绕着O 点扶起来,已知旗杆的长度为L ,学生的身高为h ,当学生以速度v 向左运动时,旗杆转动的角速度为(此时旗杆与地面的夹角为α)( )
第八章点的合成运动
8-5 杆OA长l,由推杆推动而在图面内绕点O转动,如图所示。假定推杆的速度为?,其弯头高为a。试求杆端A的速度的大小(表示为由推杆至点O的距离x的函数)。 题8-5图 【知识要点】点得速度合成定理和刚体的定轴转动。 【解题分析】动点:曲杆上B,动系:杆OA 绝对运动:直线运动 相对运动:直线运动 牵连运动:定轴转动 【解答】取OA杆为动系,曲杆上的点B为动点 v a = v e +v r 大小:√ 方向:√√√ v a = v 2 2 2 2 2 2 cos : a x va a x v a x va v v v e e e a + = + = + = = ω θ η 8-10平底顶杆凸轮机构如图所示,顶杆AB可沿导轨上下移动,偏心圆盘绕轴O转动,轴O位于顶杆轴线上。工作时顶杆的平底始终接触凸轮表面。该凸轮半径为R,偏心距OC=e,凸轮绕轴O转动的角速度为?,OC与水平线成夹角?。求当?=0°时,顶杆的速度。 【知识要点】点的速度合成定理 【解题分析】动点:点C,动系:顶杆AB 绝对运动:圆周运动 相对运动:直线运动 牵连运动:平行移动
题8-10图 【解答】 取轮心C 为动点,由速度合成定理有 v a = v e +v r 大小: √ 方向: √ √ √ 解得: v a = v e , v r =0, v e =v a =ωe 8-17 图示铰接四边形机构中,O 1A =O 2B =100mm ,又O 1 O 2=AB ,杆O 1A 以等角速度?=2rad/s 绕O 1轴转动。杆 AB 上有一套筒C ,此筒与杆CD 相铰接。机构的各部件都在同一铅直面内。求当?=60°时,杆CD 的速度和加速度。 题8-17图 【知识要点】 点的运动速度和加速度合成定理 【解题分析】 动点:套筒C,动系:杆AB 绝对运动:直线运动 相对运动:直线运动 牵连运动:平行移动 【解答】 取C 点为动点,杆AB 为动系 (1)速度 v a =v e + v r , v e = v A = A O 1?ω s m v v e a /1.060cos 0 =?= (2) 加速度 a a = a e +a r ,A O a a n A n e 12 ?==ω 2 0/35.030cos s m a a n e a =?= 8-20 图示偏心轮摇杆机构中,摇杆O ,A 借助弹簧压在半径为R 的偏心轮C 上。偏心轮C 绕轴O 往复摆动,从而带动摇杆绕轴O 1摆动。设OC 上OO 1时,轮C 的角速度为O ,角加速度为零,?=60°。求此时摇杆O 1A 的角速
第三讲光流分析法
第三讲 光流分析法 3.1 二维运动与视在运动 1. 而我们所能得到的是时变图像的某种采样点阵(或采样栅格)的图像序列,问题是: 2.可控与可观测问题—>即真实二维位移场与速度是否可观测? 3.二维运动——也称投影运动: 透视、 正交投影 三维运动可由物体像素的三维瞬时速度或三维位移来描述,但三维瞬时速度及三维位移正是我们要估计的,这是一个逆问题。而我们可观测到的是视在运动。 (1)假定投影中心在原点 P P ' — 三维位移矢量 p p ' — 二维成像平面上的二维位移矢量 成像平面,投影平面 ← 光学上 三维场景 ——> 二维的时变图像 ——> 数学上 3D →2D 投影 二维位移场 二维速度场 t 时刻 t ′时刻 P ′ P ′ 投影 P P 投影
(2)假定投影中心在O 1点 由于投影作用,从P 点出发, 终点在O 1P / 虚线上的三维位移矢 量均有相同的二维投影位移矢量。 所以说,投影的结果只是三维真实 运动的部分信息。 (3)设t l t t R t X ?+='∈,),(3 由像素的运动 '(,)(,,)C C X t d X t t S → 二维位移矢量函数 对应于点阵 ∧3 ,则有 , ;;),(),(t l t X d t l t X d C P ?=?(x ,t )∈ ∧3 ) ,(),(t l t X d l k n d P ?=?;; (n ,k )∈ Z 3 k 表达了t ‘- t 的时间离散 T n n n ),(21=? 假定三维瞬时速度为),,(3 21X X X &&&,则 ),(),(k n V t X V C P = 4.光流场与对应场 (1)p p ' 定义为对应矢量 光流矢量定义为某点 3),(R t X ∈ 上的图像平面坐标的瞬时变化率, 为一个导数。 T T dt dx dt dx V V V )/,/(),(2121== 表征了时空变化,而且是连续的变化。 (2) 当0→-'=?t t t 时,则光流矢量与对应矢量等价。如果在某个点阵∧3可 观测到这种变化,则就意义 对应场<——像素的二维位移矢量场 光流场<——像素的二维速度矢量场 也分别称为二维视在对应场与速度场。一般而言,对应矢量 ≠位移场 光流矢量≠速度场 ( O 1 p ′ p O X 2 X 1 P ′ P 图像平面X 3 X
通用二维运动平台设计
题目:通用二维运动平台设计学生姓名:X X X 学院:机械学院 班级:机制08-5班 指导教师:XXXX 201X 年 1 月 4 日
摘要 X-Y数控工作台是许多机电一体化设备的基本部件,如数控机床的加工系统、纵横向进给、立体仓库中堆垛机的平面移动系统、平面绘图仪的绘图系统等,尽管结构和功能各不相同,但基本原理相同。机电一体化系统是将机械系统与微电子系统结合而形成的一个有机整体。本文通过对X-Y工作台即能沿着X向、Y向移动的工作台的机械系统、控制系统及接口电路的设计,阐述了机电一体化系统设计对专业教学的意义及技术关键。 本次大四的课程设计,主要设计和研究X-Y工作台及其电气原理图。确定X-Y工作台的传动系统,并且选择了螺旋传动,验算了螺旋传动的刚度、稳定性及寿命等参数;并设计了导轨,据其用途和使用要求,选择了直线滚动导轨副,确定了其类型、转动力矩、转动惯量。控制系统包括了系统电源配置、CPU电路、RAM、ROM扩展,键盘与显示、I/O通道接口、通信接口等。我们利用了8031主控器、6264片外数据存储器、2764片外程序存储器、74LS373地址锁存器、74LS138片选地址译码器及8155、8255可编程I/O扩展等MCS-51单片机设计其硬件电路图。 关键词:滚珠丝杠螺母副;直线滚动导轨副;步进电机;工作台;MCS—51单片机
Abstract: X-Y NC worktable is the integration of mechanical and electrical equipment parts,such as CNC machining system, vertical feed,three-dimensional warehouse stacker plane moving system,graphic plotter plotting system, although the structure and function of each are not identical,but the basic principles are the same.Mechanical and electrical integration system is the mechanical systems and microelectronics systems combine to form an organic whole.This article through to the X-Y table along with X,Y to move to the workbench mechanical system,control system and the design of the interface circuit,elaborated the mechanical and electrical integration system design on specialized teaching significance and key technology. The big four of the curriculum design,the main design and research XY table and electrica schematic diagram . Determination of XY table drive system,and chose the screw drive,check of the spiral transmission rigidity,stability and lifetime parameters;and the design of the guide,according to its purpose and use requirements, select the linear rolling guideway, determine its types,torque,moment of inertia.The control system includes the system power allocation,CPU circuit,RAM,ROM, keyboard and display,I/O channel interface, communication interface etc..We use the 8031 main controller,6264 pieces of data memory,2764 pieces of external program memory,an address latch,74LS373 74LS138 chip select address decoder and a 8155,8255 programmable I/O extension MCS-51 microcontroller design the hardware circuit diagram. Keywords: ball screws; linear rolling guideway; stepping motor; table; MCS-51 single chip microcomputer
第14章二维运动估计
第十四章 二维运动估计 早期设计的机器视觉系统主要是针对静态场景的,为了满足更高级的应用需求,必须研究用于动态场景分析的机器视觉系统.动态场景分析视觉系统一般需要较大的存储空间和较快的计算速度,因为系统的输入是反应场景动态变化的图像序列,其包含的数据十分巨大.图像动态变化可能由摄象机运动、物体运动或光照改变引起,也可能由物体结构、大小或形状变化引起.为了简化分析,通常我们假设场景变化是由摄象机运动和物体运动引起的,并假设物体是刚性的. 根据摄象机和场景是否运动将运动分析划分为四种模式:摄象机静止-物体静止,摄象机静止-物体运动,摄象机运动-物体静止,摄象机运动-物体运动,每一种模式需要不同的分析方法和算法。摄象机静止-物体静止模式属于简单的静态场景分析.摄像机静止-场景运动是一类非常重要的动态场景分析,包括运动目标检测、目标运动特性估计等,主要用于预警、监视、目标跟踪等场合。摄象机运动—物体静止是另一类非常重要的动态场景分析,包括基于运动的场景分析、理解,三维运动分析等,主要用于移动机器人视觉导航、目标自动锁定与识别等.在动态场景分析中,摄象机运动—物体运动是最一般的情况,也是最难的问题,目前对该问题研究的还很少. 图像运动估计是动态场景分析的基础,现在已经成为计算机视觉新的研究热点。根据所涉及的空间,将图像运动估计分为二维运动估计和三维运动估计,显然,这种划分不是十分严格,因为二维运动参数的求解有时需要三维空间的有关参数引导,而许多三维参数的求解需要以二维参数为基础。本章主要讨论二维运动估计,三维运动估计和分析将在第十五章讨论。 14.1图像运动特征检测 对许多应用来说,检测图像序列中相邻两帧图像的差异是非常重要的步骤.场景中任何可察觉的运动都会体现在场景图像序列的变化上,如能检测这种变化,就可以分析其运动特性.如果物体的运动限制在平行于图像平面的一个平面上,则可以得到物体运动特性定量参数的很好估计.对于三维运动,则只能得到物体空间运动的定性参数估计.场景中光照的变化也会引图像强度值的变化,有时会引起较大的变化.动态场景分析的许多技术都是基于对图像序列变化的检测.检测图像变化可以在不同的层次上进行,如像素、边缘或区域.在像素层次上要对所有可能的变化进行检测,以便在后处理阶段或更高层次上使用. 14.1.1差分图像 检测图像序列相邻两帧之间变化的最简单方法是直接比较两帧图像对应像素点的灰度值.在这种最简单的形式下,帧),,(j y x f 与帧),,(k y x f 之间的变化可用一个二值差分图像),(y x f DP jk 表示: ???>-=其它如果0),,(),,(1),(T k y x f j y x f y x f DP jk (14.1) 式中T 是阈值. 在差分图像中,取值为1的像素点被认为是物体运动或光照变化的结果.这里假设帧与帧之间配准或套准得很好.图14.1和14.2示意了两种图像变化情况,一种是由于光照变化造成的图像变化,另一种是由于物体的运动产生的图像变化.需要指出,阈值
内工大二维平台设计
课程设计说明书 题目:通用二维平台设计 学院:机械学院 班级:机电09-1班 姓名:窦继慧 学号:200920102117 指导教师:刘江 2012年12月
内蒙古工业大学课程设计(论文)任务书 课程名称:专业综合设计2 _ 学院:机械学院班级:机2006-1 学生姓名: ___ 学号: _ 指导教师:刘江 一、题目 通用两维运动平台设计 二、目的与意义 《专业综合设计2》课程设计是机械设计制造及其自动化专业实践性非常强的教学环节之一,是机械类高年级学生综合应用基础课、技术基础课、专业课等知识体系,将机械、驱动、传感及计算机控制有机地集成融合在一起,独立设计一种具有特定功能的机电装备。 通过本次课程设计,培养学生运用所学《机电装备设计》课程的知识,对典型机电装备的工作原理、组成要素及核心技术问题的分析能力; 培养学生用《机电装备设计》的知识及相关知识体系,掌握如何将机械和电气驱动、检测技术和计算机控制融合在一起,如何构成一种性能优良、工作可靠及结构简单的机电装备的一般设计方法和规律,提高设计能力; 通过设计实践,熟悉设计过程,学会正确使用资料、正确使用图书特别是电子图书资源、网络资源,查阅技术文献、设计计算、分析设计结果及绘制机械、电气图样,在机电一体化技术的运用上得到训练; 通过课程设计的全过程,为学生提供一个较为充分的设计空间,使其在巩同所学知识的同时,强化创新意识,在设计实践中深刻领会机电装备设计的内涵。 三、要求(包括原始数据、技术参数、设计要求、图纸量、工作量要求等) 技术参数 1、运动平台面尺寸:250×200; 2、平台移动行程:X×Y=160×125; 3、夹具和工件总重:500N; 4、最高运行速度: 步进电机运行方式:空载:1.5m/min; 切削:0.7m/min; 交流伺服电机运行方式:空载:15m/min;切削:6m/min; 5、系统分辨率:开环模式0.01mm/step;半闭环模式0.005mm/step; 6、系统定位精度:开环模式±0.10mm;半闭环模式±0.01mm; 7、切削负载:X向300N;Y向400N;Z向500N 设计要求 1、实现X-Y两坐标联动; 2、用步进电机或交流伺服电机作驱动元件; 3、设置工作台的越位报警和紧急事故的急停开关,并响应中断; 4、任意平面曲线的加工,具有自动换象限的功能; 5、平台具有快速驱动功能; 6、平台具有断电手动调整功能。 图纸量和工作量要求 1、机械总装配图 在CAXA环境下绘制二维运动平台的结构图,并进行详细设计,最后用A1号图纸打印输出。
通用两维运动平台说明书
摘要 【摘要】:X-Y工作台是指能分别沿着X向和Y向移动的工作台。数控机床的加工系统、立体仓库中堆垛机的平面移动系统、平面绘图仪的绘图系统等,尽管结构和功能各不相同,但基本原理相同。机电一体化系统是将机械系统与微电子系统结合而形成的一个有机整体。本文通过对X-Y工作台的机械系统、控制系统及接口电路的设计,阐述了机电一体化系统设计中共性和关键的技术。 本次课程设计,主要设计和研究X-Y工作台及其电气原理图。确定X-Y工作台的传动系统,并且选择了螺旋传动,验算了螺旋传动的刚度、稳定性,寿命等参数;还设计了导轨,根据其用途和使用要求,选择了直线滚动导轨副,确定了其类型、转动力矩、转动惯量。利用8031、6264、2764、373、8155、8255等MCS—51单片机设计其硬件电路图。 【关键词】:滚珠丝杠螺母副;直线滚动导轨副;步进电机;MCS—51单片机
目录 第一章总体设计方案 (4) 1.1系统运动方式的确定与驱动系统的选择 (4) 1.2机械传动方式 (4) 1.3计算机系统选择 (4) 1.4总体方案的确定 (5) 第二章机床进给驱动系统机械部分设计计算 (6) 2.1 设计参数 (6) 2.2 滚珠丝杠螺母副的计算与选型 (6) 2.2.1 X向进给丝杠 (6) 2.2.2 Y向进给丝杠 (8) 2.2.3滚珠丝杠副的几何参数 (13) 2.3 滚动导轨的计算与选择 (13) 2.3.1 滚动导轨副的额定寿命 (13) 2.4.1 转动惯量的计算 (15) 2.4.2 电机的力矩的计算 (16) 第三章微机数控系统硬件电路设计 (23) 3.1 计算机系统 (23) 3-2 单片微机数控系统硬件电路设计内容 (23) 3.2.1 绘制电气控制系统框图 (23) 3.2.2 选择CPU的类型 (24) 3.2.3 存储器扩展电路的设计 (24) 3.2.4 I/O接口电路设计 (25) 3.3 各类芯片简介 (25) 3.3.1 8031芯片简介 (25) 3.3.2 373芯片简介 (25) 3.3.3 6264芯片简介 (26) 3.3.4 2764芯片简介 (26) 3.3.5 8155芯片简介 (26) 3.3.6 8255芯片简介 (26)
基于线性搜索的快速运动估计算法
第38卷 第2期2004年2月 西 安 交 通 大 学 学 报 J OU RNAL OF XI′AN J IAO TON G UN IV ERSIT Y Vol.38 №2 Feb.2004基于线性搜索的快速运动估计算法 丁贵广,郭宝龙 (西安电子科技大学机电工程学院,710071,西安) 摘要:为了减小快速运动估计算法的计算复杂度和提高运动补偿的准确性,提出了一种新的块匹配运动估计算法,称为线性正方形搜索算法.该算法采用运动估计的线性搜索策略,对于不重要的搜索区域利用线性搜索技术进行快速搜索以减小算法的计算复杂度,而对于重要搜索区域,即最佳点所在区域,用9点的正方形模块进行精细搜索以提高算法的搜索精度.实验结果证明,该算法与菱形算法相比不仅计算复杂度减小了10%以上,而且视频编码效率可以提高约011dB. 关键词:块匹配算法;运动估计;线性搜索;视频编码 中图分类号:TP391 文献标识码:A 文章编号:0253-987X(2004)02-0136-04 N e w F ast Motion Estimation Algorithm B ased on Line Search Di ng Guiguang,Guo B aolong (School of Electromechanical Engineering,Xidian University,Xi′an710071,China) Abstract:In order to reduce the computational complexity of the fast motion estimation and improve the accuracy of motion compensation,a new block2matching algorithm called line2square search(L SS)algorithm was pro2 posed,in which the strategy of the line search was introduced.The L SS algorithm performed the line search for the unimportant area to reduce the computation complexity.For the important search area in which optimal points were existed,a square search pattern consisted of9checking points was used to carry out the refined search,thus the search accuracy and the prediction quality were https://www.wendangku.net/doc/a19170511.html,pared with the diamond search algorithm,experimental results showed that the computational complexity could be reduced up to10%and the coding efficiency could be increased about011dB by the L SS algorithm. K eyw ords:block2m atchi ng al gorithm;motion esti m ation;li ne search;vi deo codi ng 对于视频序列图像,由于相邻帧之间存在很大的时间相关性,即时间冗余,所以通过减少时间冗余,可以大幅度提高视频编码的效率.基于块匹配的运动估计算法是一种有效的方法,它已经被许多视频编码标准所采纳[1,2].在块匹配运动估计算法中,全搜索(FS)算法精度最高,但由于它要对搜索区内的每个搜索点进行检测,因此计算复杂度高,软硬件实现困难.后来人们相继提出了许多快速搜索算法,如三步法(TSS)[3]、四步法(FSS)[4]、二维对数法(TDL)[5]、基于块的梯度下降法(BB G DS)[6]、交叉法(CS)[7]和菱形法(DS)[8,9\〗等,它们通过设计不同的搜索模板和搜索策略,在计算复杂度上比FS 减小了许多,但搜索的准确性比不上FS.因此,有必要寻找更加高效的块匹配运动估计算法. 本文在分析运动矢量和绝对差和(Sum of Ab2 solute Difference,SAD)的空间分布特性的基础上,设计了一种新的搜索算法———线性正方形搜索算法(Line2Square Search,L SS).实验结果表明,本文提出的L SS算法在计算复杂度和准确性上都明显优于DS等块匹配算法. 收稿日期:2003-05-05. 作者简介:丁贵广(1976~),男,博士生;郭宝龙(联系人),男,教授,博士生导师. 基金项目:国家自然科学基金资助项目(69975015);教育部优秀青年教师计划资助项目.
加工车间二层运动平台框架有限元分析
加工车间二层运动平台框架有限元分析 摘要:为了校核加工车间二层运动平台框架在静止及加载启动时的结构强度与 刚度,对整个运动平台建立有限元模型并进行加载分析,模拟真实状况下的运动 平台结构响应。文章详细分析了运动平台的有限元模型建立方法、建模注意事项、加载步骤及有限元结果分析说明。经过实际应用证明,该结构强度可靠,运行平稳,极大的提高了产品的设计研发流程。 关键词:运动平台;ANSYS梁单元;建模;有限元分析;加载分析 0引言 加工车间二层运动平台框架主要用于车间内大型机械产品的焊接或装配等工作,平台的强度与刚度性能直接影响到作业人员的安全以及作业的精度,对整个 结构进行强度与刚度分析是非常必要的,传统的解析法费时费力且不能模拟复杂 真实的工作状况,参考价值较低。而采用先加工试验样机,再实验的方法,耗时 耗力,成本较高。在此实际需求背景下,有限元分析方法应运而生,随着计算机 技术的迅猛发展,该方法表现出极大的生命力。研发人员在建立有限元模型的基 础上,施加实际载荷就能对复杂的现实问题进行有效模拟,所得的结果具有极大 的参考价值。因此该方法越来越多的应用到机械研发设计领域,提高了设计研发 的效率,降低了成本。 1.建立有限元模型 建立有限元分析模型是所有有限元计算的基础也是整个分析过程至关重要的 步骤,在这其中如何对实际模型进行相应简化是其中的难点,模型简化的效果轻 则影响局部分析的结果,重则对最终整体结果产生影响,最严重的情况可能导致 分析结果的不收敛,另外,有限元网格质量的好坏会直接影响到分析的结果,通 常来说,八节点六面体单元具有更高的分析精度,如何将怎样划分网格提前考虑 到建模过程中,也是设计人员工作的难点。 有限元分析中常用的分析模型有二维平面模型与三维实体模型,其中当整体 模型具有对称特征时,通常使用平面模型进行求解,可简化求解模型,提高求解 速度,对于复杂的模型通常需对模型细节进行简化后,建立三维实体模型进行分析。本文涉及到的问题可以建立三维实体模型,也可以使用梁单元进行模型的建立,使用梁单元可提高建模效率,增加求解的速度及精度,另外本文分析过程使 用APDL语言进行建模、加载及求解,便于进行分析文件的存储及交流。 为了便于计算,提高计算的效率,对加工车间二层运动平台框架整体框架模 型进行了相应简化处理,简化处理之后的有限元模型如图1所示(本文采用梁单元): 图1简化后的有限元模型 使用梁单元建模时,仅需要在结构的两端点之间建立直线即可,进一步简化 了建模难度,需要注意的是,使用梁单元时注意截面方向,对于矩形梁来说,截 面不同对应的力学系数(如抗弯截面系数)是不同的,所以要建立正确的截面方 向确定节点。 2.加载及求解 工况一,在顶部四个支撑点施加完全约束,对整个模型施加重力加速度(此 处注意ANSYS中重力载荷施加方向),并在移动平台底部受力面施加500kg的均 布载荷作用,以此来模拟运动平台在满载静止情况,得到的有限元分析结果如图
高一物理必修二第二章圆周运动测试题
高一物理必修二 第二章圆周运动小测题 1.一质点做匀速圆周运动,下列说法中,错误的是( ) A.任意相等的时间内,通过相等的弧长 B.任意相等的时间内,通过的位移相同 C.任意相等的时间内,转过相等的角度 D.任意时刻,速度的大小相等 2.关于匀速圆周运动的说法,以下正确的是 [ ] A.匀速圆周运动是速度不变的运动 B.匀速圆周运动是加速度不变的运动 C.匀速圆周运动是速率不变的运动 D.匀速圆周运动是合力不变的运动 3.质点做匀速圆周运动,下列错误的是( ) A 、速度越大,周期一定越小 B 、角速度越大,周期一定越小 C 、转速越大,周期一定越大 D 、半径越小,周期一定越小 4. 如图所示的皮带传动装置正在工作中,主动轮半径是从动轮半径的一半.传动过程中皮 带与轮之间不打滑,A 、B 分别是主动轮和从动轮 边缘上的两点,则A 、B 两点的角速度、线速度之 比分别是( ) A .1:2;1:1; B .1:2;2:1; C .2:1;1:1; D .1:1;2:1. 5、如图所示,用细线吊着一个质量为m 的小球,使小球在水平面内做圆锥摆运动,关于小球受力,正确的是 A .受重力、拉力、向心力 B .受重力、拉力 C .受重力 D .以上说法都不正确 6、关于做匀速圆周运动物体的向心加速度方向,下列说法正确的是 A .与线速度方向始终相同 B .与线速度方向始终垂直 C .始终指向圆心 D .始终保持不变 7.有一个惊险的杂技节目叫“飞车走壁”,杂技演员骑摩托车先在如图所示的大型圆筒底部作速度较小半径较小的圆周运动,通过逐步加速,圆周运动半径亦 逐步增大,最后能以较大的速度在竖直的壁上作匀速圆周运动,这 时使车子和人整体作圆周运动的向心力是( ) A .圆筒壁对车的静摩擦力 B .筒壁对车的弹力 C .摩托车本身的动力 D .重力和摩擦力的合力 8.如图所示,固定的锥形漏斗内壁是光滑的,内壁上有两个质量相 等的 小 球A 和B ,在各自不同的水平面做匀速圆周运动,以下说法正确的 是( ) A. V A >V B B. ωA <ωB C. a A =a B D. 压力N A >N B 9.质量为m 的物块,沿着半径为R 的半球形金属壳内壁滑下,半 球形金属壳竖直固定放置,开口向上, 滑到最低点时速度大小A B B A V
成都七中16届高一第二章匀速圆周运动复习资料
高2016级下期匀速圆周运动复习资料 一、基础知识梳理 1. 描述圆周运动的物理量 (1) 线速度是矢量,描述做圆周运动的物体运动_______的物理量,方向和半径_____,与圆弧相切, 单位是_______,v =s t =2πr T 。 (2) 角速度是______,描述物体绕圆心__________的物理量,单位是________ω=θt =2πT ,V=_______. (3) 周期是物体沿着圆周_______所用的时间,用符号____表示,单位是______;频率是物体在1s 内完 成周期性运动的次数,用___表示,单位是_____,频率和周期呈____关系;转速是物体在单位时 间内转过的圈数,用符号___表示,如果单位时间指1s ,转速和频率数值____;如果单位时间是1min , 那么转速和频率的数值关系是f=__n. (4) 向心加速度是描述______变化快慢的物理量,方向指向_____,单位____,公式表达式 a=_______=_______=_______=________=__________. (5) 向心力F=ma=______=______=______=______,作用效果是产生向心加速度,只改变线速度的 _______,不改变线速度的_______,是物体真实受力指向圆心的_____,是_____力,受力分析时 不分析向心力;向心力的方向指向_____,与运动方向_____,永远不会对物体做功。力决定物体 的运动,因为有向心力的存在迫使物体不断改变运动方向而做圆周运动, (6) 对于匀速圆周运动,T 、___、___保持恒定不变,而V 、___、___是在不断变化的,因此匀速圆周 运动不仅是变速运动,也是变_____运动。 2.做圆周运动的传动装置的运动学特点 (1)同轴传动:固定在一起共轴转动的物体上各点________和_______相同,______和半径成正比,向心加 速度和______成正比,转动方向相同; (2)皮带传动:不打滑的摩擦传动和皮带传动的两轮边缘上各点_______大小相等,角速度与转动半径成 ______关系,周期与转动半径成_____关系,向心加速度与转动半径成_____关系,转动方向______. (3)齿轮传动:两个齿轮轮齿咬合,边缘各点______大小相等, 角速度与转动半径成______关系,周期与 转动半径成_____关系,向心加速度与转动半径成_____关系,转动方向______. (4)在讨论V 、ω、r 三者关系时,应采用________,即保持其中一个量不变来讨论另外两个量的关系. (5)在比较传动装置中某两点的向心加速度时,选择公式时尽可能选择含有相同物理量的公式表达式,若均 不相同,可选择一个和这两个点具有相同之处的点作为桥梁进行分析。 3. 圆周运动的实例分析 (1)基本思路 A . 选取研究对象,确定轨道平面、圆心位置和轨道半径。 B . 进行受力分析,确定什么力提供向心力。若是匀速圆周运动,合外力提供向心力,若是变速圆周运动, 指向圆心方向上的合外力提供向心力。 C . 沿着向心加速度方向和垂直与向心加速度方向列出建立方程。 (2)问题关键:分析清楚向心力的来源 A. 做匀速圆周运动的物体,速度大小不变,方向改变,______提供向心力,合外力方向与速度方向______,物体加速度的方向与向心加速度方向______。 B. 做非匀速度圆周运动的物体,合外力沿着半径方向的分力改变速度的______,提供______加速度,而 物体的速度大小也在改变,合外力必然存在垂直于半径方向的分力,提供_______加速度,合加速度方向 与向心加速度方向存在一个夹角。