无线遥控发射器SC2262

遥控编码电路SC2262
简 介:
SC2262是CMOS 工艺制造的低功耗通用编码电路,它和SC2272配对使用,最多有12位三态编码。电路具有省电模式,可用于无线电和红外线遥控发射等应用。
特 点:
z CMOS 工艺制造,低功耗 z 外部应用线路元器件少 z 工作电压范围宽:2V~15V
z 地址A 和数据D 位通用 z 数据A 最多可达6位
z 红外遥控和无线电遥控应用
应用范围:
z 车辆防盗系统 z 家庭防盗系统
z 遥 控 玩 具 z 其他工业遥控
引 脚 图:
SC2262
A0
A1
A2
A3
A4
A5
A6/D5
A7/D4
Vss
Vcc Dout OSC1 OSC2 TE A11/D0 A10/D1 A9/D2 A8/D3 1 2 3 4 5 6 7 8 9 181716151413121110
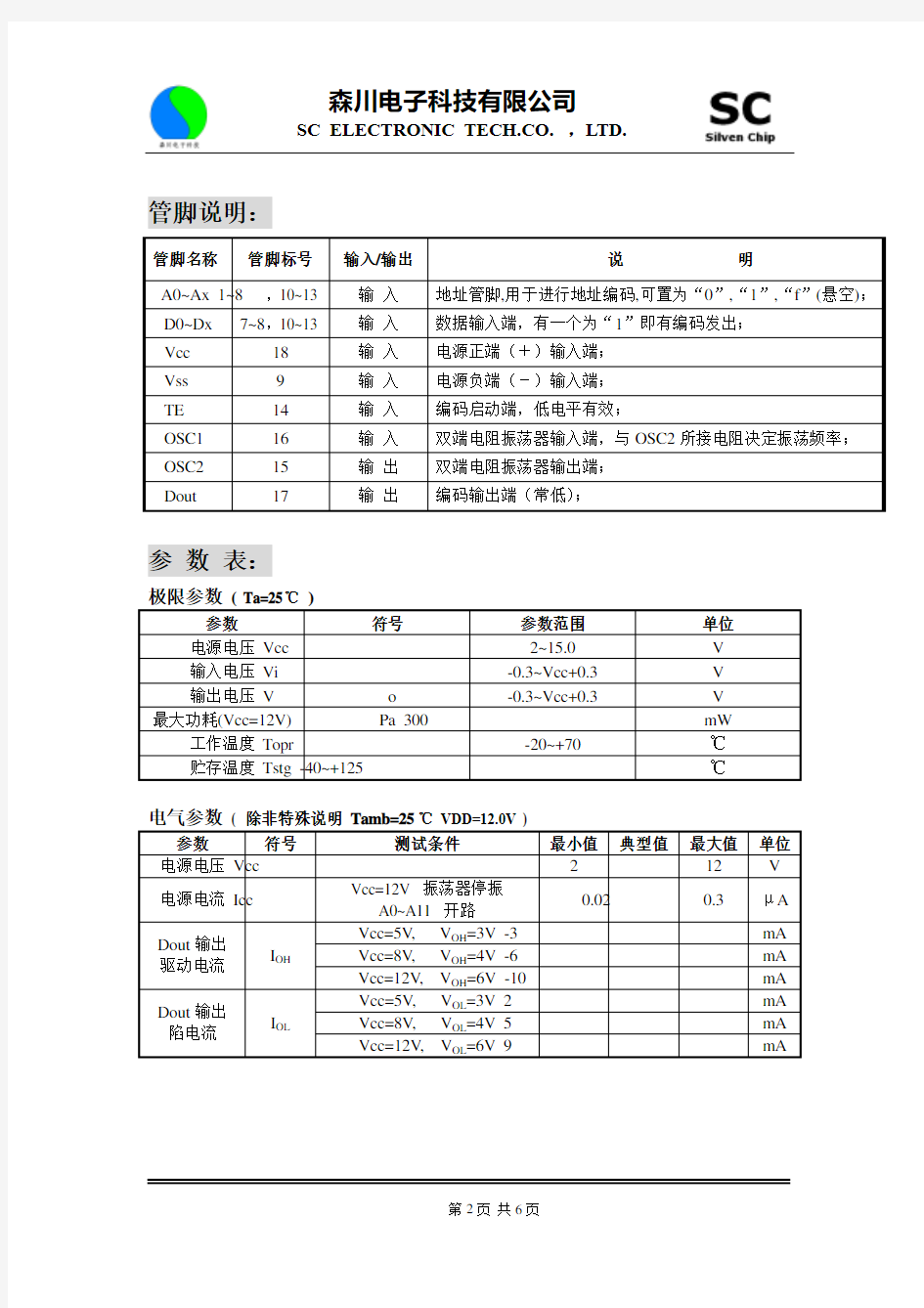
管脚说明:
管脚名称管脚标号输入/输出说明
A0~Ax 1~8,10~13 输入地址管脚,用于进行地址编码,可置为“0”,“1”,“f”(悬空); D0~Dx 7~8,10~13 输入数据输入端,有一个为“1”即有编码发出;
Vcc 18 输入电源正端(+)输入端;
Vss 9 输入电源负端(-)输入端;
TE 14 输入编码启动端,低电平有效;
OSC1 16 输入双端电阻振荡器输入端,与OSC2所接电阻决定振荡频率; OSC2 15 输出双端电阻振荡器输出端;
Dout 17 输出编码输出端(常低);
参数表:
极限参数( Ta=25℃)
参数符号参数范围单位
电源电压 Vcc 2~15.0 V
输入电压 Vi -0.3~Vcc+0.3 V 输出电压 V o -0.3~Vcc+0.3 V
最大功耗(Vcc=12V)Pa 300 mW 工作温度 Topr -20~+70 ℃
贮存温度 Tstg -40~+125 ℃
电气参数( 除非特殊说明 Tamb=25℃ VDD=12.0V )
参数符号测试条件最小值典型值最大值单位
电源电压 Vcc 2 12 V
电源电流 Icc Vcc=12V 振荡器停振
A0~A11 开路
0.02 0.3
μA Vcc=5V, V OH=3V -3 mA Vcc=8V, V OH=4V -6 mA
Dout输出驱动电流I OH
Vcc=12V, V OH=6V -10 mA
Vcc=5V, V OL=3V 2 mA
Vcc=8V, V OL=4V 5 mA
Dout输出陷电流I OL
Vcc=12V, V OL=6V 9 mA
应用说明:
与SC2272的匹配
SC2262完成发射,送出SC2262当前的地址编码和数据位数据。当SC2272的当前地址与SC2262地址一致时,并接收到2帧以上SC2262发出的串行码,SC2272才开始接收SC2262送来的数据。为保证SC2272接收到SC2262两帧以上的串行码,SC2272的振荡频率要与SC2262的振荡频率匹配。最佳的匹配振荡频率是SC2272是SC2262的2倍。振荡频率可以通过电阻Rosc的调整作出改变。
封装形式
SC2262的典型封装是双列直插的DIP18,也可以封装成表面贴装的SOP20。
双列直插DIP18 表面贴装SOP20
史上最全的红外遥控器编码协议
目录 1)MIT-C8D8 (40k) 2) MIT-C8D8(33K) 3)SC50560-001,003P 4)M50462 5)M50119P-01 6)M50119L 7)RECS80 8)M3004 9)LC7464M 10)LC7461-C13 11)IRT1250C5D6-01 12)Gemini-C6-A 13)Gemini-C6 14) Gemini-C17(31.36K)-1 15)KONKA KK-Y261 16)PD6121G-F 17)DATA-6BIT 18)Custum-6BIT 19)M9148-1 20)SC3010 RC-5 21) M50560-1(40K) 22) SC50560-B1 23)C50560-002P 24)M50119P-01 25)M50119P-1 26)M50119P 27)IRT1250C5D6-02 28)HTS-C5D6P 29)Gemini-C17 30)Gemini-C17 -2 31)data6bit-a 32)data6bit-c 33)X-Sat 34)Philips RECS-80 35)Philips RC-MM 36)Philips RC-6 37)Philips RC-5 38)Sony SIRC 39)Sharp 40)Nokia NRC17 41)NEC 42)JVC 43)ITT
44)SAA3010 RC-5(36K)45)SAA3010 RC-5(38K)46)NEC2-E2 47) NEC-E3 48) RC-5x 49) NEC1-X2 50) _pid:$0060 51) UPD1986C 52) UPD1986C-A 53) UPD1986C-C 54) MV500-01 55) MV500-02 56) Zenith S10
红外遥控信号的解码
红外线遥控是目前使用最广泛的一种通信和遥控手段。由于红外线遥控装置具有体积小、功耗低、功能强、成本低等特点,因而,继彩电、录像机之后,在录音机、音响设备、空凋机以及玩具等其它小型电器装置上也纷纷采用红外线遥控。工业设备中,在高压、辐射、有毒气体、粉尘等环境下,采用红外线遥控不仅完全可靠而且能有效地隔离电气干扰。 1 红外遥控系统 通用红外遥控系统由发射和接收两大部分组成。应用编/解码专用集成电路芯片来进行控制操作,如图1所示。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。 图1 红外线遥控系统框图 2 遥控发射器及其编码 遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC的uPD6121G组成发射电路为例说明编码原理(一般家庭用的DVD、V CD、音响都使用这种编码方式)。当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。这种遥控码具有以下特征: 采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图2所示。
图2 遥控码的“0”和“1” (注:所有波形为接收端的与发射相反) 上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。然后再通过红外发射二极管产生红外线向空间发射,如图3所示。 图3 遥控信号编码波形图 UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。UPD6121G最多额128种不同组合的编码。 遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间,图4为发射波形图。 图4 遥控连发信号波形 当一个键按下超过36ms,振荡器使芯片激活,将发射一组108ms的编码脉冲,这108ms发射代码由一个引导码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址码(9ms~18ms),8位数据
红外遥控协议
红外遥控器的基本原理 红外线的特点人的眼睛能看到的可见光,若按波长排列,依次(从长到短)为红、橙、黄、绿、青、蓝、紫,红光的波长范围为0.62μm~0.7μm,比红光波长还长的光叫红外线。红外线遥控器就是利用波长0.76μm~1.5μm之间的近红外线来传送控制信号的。 红外线的特点是不干扰其他电器设备工作,也不会影响周边环境。电路调试简单,若对发射信号进行编码,可实现多路红外遥控功能。 红外线发射和接收 人们见到的红外遥控系统分为发射和接收两部分。发射部分的发射元件为红外发光二极管,它发出的是红外线而不是可见光。 常用的红外发光二极管发出的红外线波长为940nm 左右,外形与普通φ5mm 发光二极管相同,只是颜色不同。一般有透明、黑色和深蓝等三种。判断红外发光二极管的好坏与判断普通二极管一样的方法。单只红外发光二极管的发射功率约100mW。红外发光二极管的发光效率需用专用仪器测定,而业余条件下,只能凭经验用拉距法进行粗略判定。 接收电路的红外接收管是一种光敏二极管,使用时要给红外接收二极管加反向偏压,它才能正常工作而获得高的灵敏度。红外接收二极管一般有圆形和方形两种。由于红外发光二极管的发射功率较小,红外接收二极管收到的信号较弱,所以接收端就要增加高增益放大电路。然而现在不论是业余制作或正式的产品,大都采用成品的一体化接收头。红外线一体化接收头是集红外接收、放大、滤波和比较器输出等的模块,性能稳定、可靠。所以,有了一体化接收头,人们不再制作接收放大电路,这样红外接收电路不仅简单而且可靠性大大提高。红外遥控器的协议 鉴于家用电器的品种多样化和用户的使用特点,生产厂家对红外遥控器进行了严格的规范编码,这些编码各不相同,从而形成不同的编码方式,统一称为红外遥控器编码传输协议。了解这些编码协议的原理,不仅对学习和应用红外遥控器是必备的知识,同时也对学习射频(一般大于300MHz)无线遥控器的工作原理有很大的帮助。 到目前为止,笔者从外刊收集到的红外遥控协议已多达十种,如:RC5、SIRCS、Sony、RECS80、Denon、NEC、Motorola、Japanese、SAMSWNG 和Daewoo 等。我国家用电器的红外遥控器的生产厂家,其编码方式多数是按上述的各种协议进行编码的,而用得较多的有NEC协议。 红外遥控器的结构特征 红外遥控发射器由键盘矩阵、遥控专用集成电路、激励器和红外发光二极管组成。遥控专用集成电路(采用AT89S52 单片机)是发射系统的核心部分,其内部由振荡电路、定时电路、扫描信号发生器、键输入编码器、指令译码器、用户码转换器、数码调制电路及缓冲放大器等组成。它能产生键位扫描脉冲信号,并能译出按键的键码,再经遥控指令编码器得到某键位的遥控指令(遥控编码脉冲),由38KHZ 的载波进行脉冲幅度调制,载有遥控指令的调制信号激励红外二极管发出红外遥控信号。 在红外接收器中,光电转换器件(一般是光电二极管或光电三极管,我们这里用的是PIN 光电二极管)将接收到的红外光指令信号转换成相应的电信号。此时的信号非常微弱而且干扰特别大,为了实现对信号准确的检测和转换,除了高性能的红外光电转换器件,还应合理地选择并设计性能良好的电路形式。最常用的光电转换器件是光电二极管,当光电二极管PN 结的光敏面受到光照射后,PN 结的半导体材料吸收光能,并将光能转换为电能。当光电二极管上加有反向电压时,二极管中的反向电流将随入射光照强度的变化而变化,光的辐照强度越大,其反向电流越大。也就是说,光电二级管的反向电流随入射的光脉冲作同频率
起重设备的安全装置
编号:SM-ZD-81620 起重设备的安全装置Organize enterprise safety management planning, guidance, inspection and decision-making, ensure the safety status, and unify the overall plan objectives 编制:____________________ 审核:____________________ 时间:____________________ 本文档下载后可任意修改
起重设备的安全装置 简介:该安全管理资料适用于安全管理工作中组织实施企业安全管理规划、指导、检查和决策等事项,保证生产中的人、物、环境因素处于最佳安全状态,从而使整体计划目标统一,行动协调,过程有条不紊。文档可直接下载或修改,使用时请详细阅读内容。 为了保护起重设备和防止发生人身事故,起重设备必须安装安全装置,主要有各类限位器、起重量限制器、起重力矩限制器、防冲撞装置、缓冲器和夹轨器等。 1.位置限位器 (1)起升高度限位器。用来限止重物起升高度。当取物装置起升到上极限位置时,限位器发生作用使用重物停止上升,防止机构损坏。起升高度限位器主要有重锤式、蜗轮蜗杆式和螺杆式。 重锤式起升限位器使用方便,但因钢丝绳有时会与重锤发生磨擦,使用时要注意。螺杆式限位器不但可以限制起升高度,还可以限制下降深度。吊运灼热的金属液体的起重机应分别设置两套不同形式的起升高度限位器,并分别断开不同的断路器。 (2)行程限位器。它由顶杆和限位开关组成。用于限制运行、回转和变幅等终端极限位置,当顶杆触动限位开关转
38K红外遥控解码
#include
红外遥控器信号接收和显示的设计1
电子电路综合设计总结报告 题目:红外遥控器信号接收和显示的设计 摘要: 随着电子技术的发展,红外遥控器越来越多的使用到电器设备中,但各种型号遥控器的大量使用带来的遥控器大批量多品种的生产,使得检测成为难题,因此智能的红外遥控器检测装置成为一种迫切的需要。在该红外遥控器信号的接收和显示电路以单片机和一体化红外接收器为核心技术,具体由单片机最小系统、单片机和PC机间的通信模块、红外接收模块、数码管显示模块和流水灯模块组成。在本系统的设计中,利用红外接收器接收遥控器发出的控制信号,并通过软件编程将接收信号存储、处理、比较,并将数据处理送至数码管显示模块。总之,通过对电路的设计和实际调试,可以实现红外遥控器信号的接收和显示功能。根据比较接收信号的不同,在数码管显示电路及流水灯电路上显示相应的按键数字或闪烁变化功能,并可实现单片机及PC机之间的通信功能,使得控制信号能在PC机上显示。
关键词:单片机红外接收器HS0038 解码串口调试
设计任务 结合单片机最小电路和红外线接收接口电路共同设计一个基于单片机的红外遥控信号接收和转发系统,用普通电视机遥控器控制该系统,使用数码管显示信号的接收结果。 1、实现单片机最小系统的设计。 2、当遥控器按下数字键时,在数码管上显示其键值。如按下数字键1,则在数码管上显示 号码01。 3、当遥控器按下音量△及音量▽时,用两位数码的周围段实现顺时针或者逆时针旋转的流 水灯功能。(为使得音量的增减清晰显示,试验中在单片机的P1口外接一排流水灯,具体功能的实现见方案的可行性论证) * 运用串口调试助手,在遥控器有按键按下时,将其键值显示在PC机上。 * 当遥控器按下频道△及频道▽时,在数码管上显示加1或减1后的数值。 一、系统方案比较和论证 1、方案比较和选择 为了实现系统整体功能,红外解码部分是核心,红外解码是指将遥控发射器所产生的红外遥控编码脉冲所对应的键值翻译出来的过程。下面将系统方案做一论证,通常有硬件解码和软件解码两种方案。 方案一:此方案中,使用专用遥控器作为控制信号发出装置,当按下遥控器的按键后,一体化红外接收装置接收到遥控器发出的设置控制信号,然后将信号送到专用的解码芯片中进行解码,解码后将信号送到单片机,由单片机查表判断这个信号是按键数值信号或控制音量、频道等信号,当确认是何种信号后,启动子程序,然后进行查询。每次红外接收头接收到红外信号传到解码器中,解码器解码完毕后送到单片机,单片机再通过查表确定这些数值并进行相应功能的控制。设计原理图如图1所示。 图1、方案一设计原理图 方案二:此方案中,采用普通的家用遥控器作为控制信号发出装置,当按下遥控器的按键后,一体化红外接收装置接收到遥控器发出的红外线控制信号,然后把这个信号转换成电信号,传到单片机中,利用单片机对这个信号进行解码,解码完成后查表确定是按键数值信号或控制音量、频道等信号,启动子程序,进行相应的显示数字等功能。然后查询,重复上述流程。设计原理图如图2所示。
无线遥控技术极其在起重机上的应用
无线遥控技术及其在起重机上的应用 在科学技术不段发展的今天,无线遥控技术应用已经十分广泛,大到人造卫星,小到家用的空调器、电视机、音响等都使用遥控技术来进行操作。遥控技术的发展被认为是一种现代化的标志,它可以充分使人从繁杂的体力劳动中解放出来,随心所欲地从远距离进行控制,如:电视机的遥控可以使人随意地躺坐来变换喜欢的电视节目,使人享受充分的休息。遥控技术的发展使人们享受着科学的魅力。由于遥控技术可以减低劳动强度、提高劳动生产率及提高作业的安全性等方面起着积极的作用,在工业自动化控制中的遥控技术的应用已愈来愈被人们重视。 日常生活中我们使用的无线遥控发射方式多数为红外线型,因其成本低,易于人们接受。但由于该控制方式受发射距离、方向和条件的限制,局限性较大,应用在工业无线控制领域就显不足。而目前广泛用于工业无线控制领域的遥控装置,主流是以无线信号进行传输的方式。 以下就起重机用无线遥控系统自身特点、发展概况、使用优势和遥控系统分类进行简单介绍。(一)起重机用无线遥控系统必须具有以下几个特点: 1.可靠性。遥控系统一旦发生故障,将影响生产正常运行。因此其系统及系统的硬件必须具有高度的可靠性。 2.安全性。遥控系统是起重机械的控制装置,如果动作有误,将发生物损、人伤的事故。因此必须保证遥控系统的百分之百的安全,具有操作者应能直接进行紧急停车和系统自动急停的安全保护。 3.抗干扰性强。能够不受电焊、电炉及起重机变频器等的电磁杂波干扰,能够在小范围内同时多台使用,互不干扰。 4.能在恶劣环境中使用。必须具有较强的防尘、防煤气、耐油、抗冲击等性能。 5.轻小型便于操作。发射系统由操作者携带进行操作,故应体积小、重量轻、携带方便。 (二)起重机用无线遥控系统的发展概况: 1.50年代,各类工业用遥控系统在欧美开始出现。 2.60年代,以德国HBC为代表的遥控制造商开发了专用于起重机控制的遥控系统,被认为是企业减少劳动力、实现自动化控制的良好途径。当时欧洲的制造业、建筑业等人手不足的现象越来越严重,遥控系统的使用渐渐引起了人们的重视。 最初研制的遥控系统的通信方式为频分制周期传送方式,即每个操作指令要配置一个频率信号。 3.70年代初,采用了与时分制周期传送方式并用的方法,增加了操作指令,并实现了设计、制造的标准化。 4.70年代末,采用了当时最先进的CMOS电路,研制出了周期循环数字方式的遥控系统,可靠性与安全性有了很大的提高。 5.80年代,采用了专用的集成电路,开发出了可靠性更高,可手持的遥控系统。 6.90年代初,采用了微处理器和大规模集成电路,使遥控系统的发展又上了一个新的台阶。 7.近年来,又研制出了具有自动跳频技术(即DECT技术)、自动频率管理技术(即AFM技术)和各类总线输出的遥控系统。 (三)起重机使用遥控系统具有以下几个优点: 1.节省人力 a.对于桥式、门式起重机及汽车起重机等装卸设备,其操作挂钩可由一人承担,操作者可直 视操作,不需要指挥。 b.对于工作效率低的起重机设备,一人可同时管理多台起重机设备。 c.可在起重机操纵同时,完成与其关连的输送带、加料器、搬运车等其它设备控制和管理。 2.提高工作效率 a.由于操作者与地面指挥由一人承担,操作者可自行判断,进行作业,提高了作业的准确性 及工作效率。
NEC协议的红外遥控器驱动程序
创作编号:BG7531400019813488897SX 创作者:别如克* 是不是觉得红外遥控+51单片机是绝妙组合?但是在编程时才发现超级纠结?其实也没那么纠结,自己摸索摸索,总能找出办法来的。 本程序占用了51单片机的定时器0以及中断1两个资源,为的是使单片机能接收到每一个红外脉冲信号,一个都不能少。如果舍不得用这两个资源,还有另一种查询的办法,就是不一定每个信号都能收到,可自己琢磨一下。
需要全套NEC协议红外遥控器资料的,到网上找,到处都有,而且很全。 另外,对着资料写程序如果实在写不出,可以找个示波器,把波形录下来好好研究研究。毕竟有些时候资料会过时,只要里面有一点东西变化了,程序就完全不一样了。这种弯路,尽量少走。 本程序只是头文件,具体到应用上还要各位自己动脑筋了,希望对大家有所帮助。共同学习,共同进步! /****************************************************************** INF_NEC.h 用于NEC协议的遥控器,主控器为51单片机。用户码8位,分布于2-17个脉冲;按键码8位,分布于18-33个脉冲。皆为前8原码,后8反码。 注意:本驱动占用51单片机的外部中断1以及定时器0两个资源,编程时注意 不要再乱动这两个资源。 *******************************************************************/ #include
起重机械24种安全防护装置
起重机械24种安全防护装置 为了保证各种起重机都能安全、可靠地工作,《起重机械安全规程》规定应装备各种安全防护装置。安全防护装置共24种,分述如下: 1、超载限制器 作用:超载限制器的综合误差,不应大于8%。当载荷达到额定载荷的90%时,应能发出报警信号。起重量超过额定起重量时,能自动切断起升动力源,并发出禁止性报警信号。 应装:额定起重量大于20t的桥式起重机、额定起重量大于l0t的门式起重机、铁路起重机、门座起重机。 宜装:额定起重量3-20t的桥式起重机、额定起重量5-10t的门式起重机、起重力矩小于25t·m 的塔式起重机。 2、力矩限制器 作用:力矩限制器的综合误差不应大于10%。当载荷力矩达到额定起重力矩时,能自动切断起升或变幅的动力源,并发出禁止性报警信号。 应装:起重量等于或大于16t的汽车起重机、轮胎起重机和履带起重机、起重能力等于或大于25t·m的塔式起重机。 宜装:起重量小于16t的汽车起重机、轮胎起重机和铁路起重机。 3、上升极限位置限制器 作用:必须保证当吊具起升到极限位置时,自动切断起升的动力源。 应装:一切类型起重机。 4、下降极限位置限制器 作用:在吊具可能低于下限位置的工作条件下,应保证吊具下降到下限极限位置时,能自动切断下降的动力源,以保证钢丝绳在卷筒上的缠绕不少于设计所规定的圈数。 应装:桥式起重机、塔式起重机,门座起重机根据需要。 5、运行极限位置限制器 作用:应保证机构在其运动到极限位置时,自动切断前进的动力源并停止运动。 应装:桥式起重机和门式起重机的大车和小车,门座起重机的吊臂在运行的极限位置。 6、偏斜调整和显示装置 作用:当两端支腿因前进速度不同而发生偏斜时,能将偏斜情况向司机指示出来,使偏斜得到调整。
红外遥控原理及解码程序
红外遥控系统原理及单片机 红外线遥控是目前使用最广泛的一种通信和遥控手段。由于红外线遥控装置具有体积小、功耗低、功能强、成本低等特点,因而,继彩电、录像机之后,在录音机、音响设备、空凋机以及玩具等其它小型电器装置上也纷纷采用红外线遥控。工业设备中,在高压、辐射、有毒气体、粉尘等环境下,采用红外线遥控不仅完全可靠而且能有效地隔离电气干扰。 1 红外遥控系统 通用红外遥控系统由发射和接收两大部分组成。应用编/解码专用集成电路芯片来进行控制操作,如图1所示。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。 图1 红外线遥控系统框图 2 遥控发射器及其编码 遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC 的uPD6121G组成发射电路为例说明编码原理(一般家庭用的DVD、VCD、音响都使用这种编码方式)。当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。这种遥控码具有以下特征:采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周
期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图2所示。 图2 遥控码的“0”和“1” (注:所有波形为接收端的与发射相反)上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。然后再通过红外发射二极管产生红外线向空间发射,如图3示。 图3 遥控信号编码波形图 UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。UPD6121G最多额128种不同组合的编码。 遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间,图4为发射波形图。
红外遥控器接收程序
//STC89C52RC //11.0592MHZ #include
HR168智能红外遥控器的通讯协议
HR168智能红外遥控器通信协议: HR168空调遥控器与监控主机之间采用RS485连接,波特率9600,校验方式为N/8/1。 第1字节第2字节第3字节第4字节第5字节第6字节 第7字节 说明:长度固定,共7个字节。累加和为第2字节到第6字节的和,高位舍去,是在转义之前处理。 转义字符:7DH为转义字符,转义符后的字节的第6位取反(bit5)。同步字节后的字节如有以下几种情况,需使用转义符:值为7eH或7dH或小于20H。7EH表示为7d5e,7DH表示为7D5D,01H表示为7D21。 主机地址:00H-FFH(0-255) 遥控器地址:00H-0FH(0-15) 命令码定义: F0:取遥控器设置 F1:取遥控器版本 00:设置遥控器 F2::设置遥控器的确认 监控主机在发出命令后2秒还没有收到回应则重发,三次后视为失败。 第4字节:00H,表示设置遥控器 第5字节: 第6字节:保留,设成00H 第7字节:校验和,是第2-6字节的累加和
确认信号(空调遥控器发送到监控主机) 空调遥控器接收到监控主机发来的设置数据包后立即处理,如果数据包正确,立即发回确认信号,否则不发回任何数据,等待接收新的指令和数据。 状态数据包,数据包格式同“状态设置数据包”。 4、取遥控器版本 回应:格式同上 第5字节:主版本号, 第6字节:高四位从版本1,第四位从版本2 如第5、6两字节的数据为0x0532,则代表版本为5.3.2。 发送命令举例: 遥控器地址为15的取遥控器版本 7E 7D 20 7D 20 F1 7D 20 7D 20 F1 遥控器地址为15的取遥控器设置 7E 7D 20 7D 20 F0 7D 20 7D 20 F0 遥控器地址为15的状态设置 7E 7D 20 7D 20 7D 20 88 7D 20 88 遥控器地址为15的取遥控器版本 7E 7D 20 7D 2F F1 7D 20 7D 20 7D 20
(安全生产)起重机的安全保护装置
起重机的安全防护装置 电力建设常用桥式起重机、门式起重机、汽车起重机、轮胎起重机、履带起重机、铁路起重机、塔式起重机、门座起重机。为了保证各种起重机都能安全、可靠地工作,《起重机械安全规程》规定应装备各种安全防护装置。安全防护装置共24种,分述如下: 1、超载限制器 作用:超载限制器的综合误差,不应大于8%。当载荷达到额定载荷的90%时,应能发出报警信号。起重量超过额定起重量时,能自动切断起升动力源,并发出禁止性报警信号。 应装:额定起重量大于20t的桥式起重机、额定起重量大于lot 的门式起重机、铁路起重机、门座起重机。 宜装:额定起重量3-20t的桥式起重机、额定起重量5-10t的门式起重机、起重力矩小于25t·m的塔式起重机。 2、力矩限制器 作用:力矩限制器的综合误差不应大于10%。当载荷力矩达到额定起重力矩时,能自动切断起升或变幅的动力源,并发出禁止性报警信号。 应装:起重量等于或大于16t的汽车起重机、轮胎起重机和履带起重机、起重能力等于或大于25t·m的塔式起重机。 宜装:起重量小于16t的汽车起重机、轮胎起重机和铁路起重机。 3、上升极限位置限制器 作用:必须保证当吊具起升到极限位置时,自动切断起升的动力
源。 应装:一切类型起重机。 4、下降极限位置限制器 作用:在吊具可能低于下限位置的工作条件下,应保证吊具下降到下限极限位置时,能自动切断下降的动力源,以保证钢丝绳在卷筒上的缠绕不少于设计所规定的圈数。 应装:桥式起重机、塔式起重机,门座起重机根据需要。 5、运行极限位置限制器 作用:应保证机构在其运动到极限位置时,自动切断前进的动力源并停止运动。 应装:桥式起重机和门式起重机的大车和小车,门座起重机的吊臂在运行的极限位置。 6、偏斜调整和显示装置 作用:当两端支腿因前进速度不同而发生偏斜时,能将偏斜情况向司机指示出来,使偏斜得到调整。 宜装:跨度等于或大于40m的门式起重机。 7、幅度指示器 作用:应保证具有变幅机构的起重机能正确指示吊具所在的幅度。 应装:汽车起重机、轮胎起重机、履带起重机、铁路起重机、塔式起重机、门座起重机。 8、联锁保护装置
万能红外遥控解码模块【精选】
https://www.wendangku.net/doc/ae19115700.html,/item.htm?id=7693624806 该模块采用5V电源供电,可以完成目前应用最广泛的多种红外遥控编码的解码,包括飞利浦(RC5)编码(典型编码芯片如SAA3010及兼容芯片如PT2210 等)和NEC编码(典型编码芯片如uPD6121,uPD6122, TC9012 )以及众多的兼容芯片型号,(如PT2221, PT2222, SC6121, SC6122,SC9012 等等),采用该模块,可以缩短开发时间,节约CPU 资源,降低总体成本。 特点 ●使用简单、可靠 ● 支持多种编码 ● 兼容SPI 及UART(波特率9600)的串行输出 ● 采用数字滤波技术,高抗干扰,无误码 ● 接收有效指示输出 ● 工业级温度范围 储存温度-65至+150℃ 工作温度-40至+85℃ 任意接口对地电压-0.3至6V 红外编码介绍 目前应用于家电等领域的红外线遥控装置,并没有统一的国际标准,目前市场上所见的红外线遥控编码芯片,超过10 种之多,分别由飞利浦公司、NEC 公司、SONY 公司、东芝公司、三菱公司、JVC 公司等生产,使用的编码方式各不相同。目前应用最广泛、兼容产品最多的,是飞利浦公司(RC5编码)的和NEC 公司的编码芯片。本模块可以完成这两种格式编码的解码工作。 RC5 编码: RC5 编码由飞利浦公司推出,其编码芯片有SAA3010,SAA3006 等,是应用很
广泛的一种编码方式。 RC5 编码采用双相位编码方式,用不同相位分别代表“0”和“1”。传送每一位的时间固定为1.778mS。 每一个指令包括1.5bits 的起始位(2 个逻辑1),1 个翻转位,5 位系统码(地址码),以及6 位命令码(键码),因此,最多可以支持64 个键。 翻转位在每次有新的按键按下去的时候翻转一次,这里指的新按键,也包括同一个键抬起后再次按下的情况。如果某个键持续按下,则编码芯片会不断地重复发送同样的数据。翻转位保持不变。而如果该键中途抬起后再次按下,则再次按下后所发送的数据中的翻转位发生翻转,其它数据保持不变。 NEC 编码: NEC 编码由NEC 公司推出,其典型编码芯片为uPD6121,uPD6122,除了NEC 公司的产品,市场上还有大量与之相兼容的产品,如PT2221, PT2222, SC6121, SC6122,SC9012 等等。是应用最广泛的一种编码方式。 该编码方式采用脉冲位置编码方式,利用脉冲间的时间间隔来区分“0”和“1”。 每个指令包括32 位数据,包括16 位的用户码、以及8 位键数据码和键数据码的反码。因为具有反码可以作为校验的依据,因此该种编码方式具有很低的误码率。理论上该编码方式可以支持256 个键,实际的编码芯片一般可支持64 个
红外线遥控接收器设计
一、题目要求 数字系统课程设计包括EDA实验板组装调试及红外遥控系统设计制作两个部分,各部分要求如下: 红外遥控系统由发射编码和接收解码两个部分组成,本课程设计要求制作发射编码电路板(遥控器)以及编写程序在EDA实验板上实现接收解码,具体说明如下: 1、发射编码部分 发射编码部分要求使用指定的元器件在万用板上完成红外遥控器的制作,该部分电路原理图参照《PT2248数据手册》,制作前请详细阅读《红外遥控器制作说明》,制作时要求元器件在万用板上排列整齐,布局合理,焊接良好,各按键功能正常,均能发送编码。 2、接收解码部分 接收解码用VHDL语言编写程序,在EDA实验板上实现解码,要求具有以下功能:(1)基本要求: (a)将一体化红外接收解调器的输出信号解码(12个单击键、6个连续键,单击键编号为7-18,连续键编码为1-6),在EDA实验板上用七段数码管显示出来; (b)当按下遥控器1—6号连续键时,在EDA实验板上用发光二极管点亮作为连续键按下的指示,要求遥控器上连续键接下时指示灯点亮,直到松开按键时才熄灭,用于区别单击键。 (c)EDA实验板上设置四个按键,其功能等同于遥控器上的1—4号按键,当按下此四个按键时七段数码管分别对应显示“1”、“2”、“3”、“4”。 (d)每当接收到有效按键时,蜂鸣器会发出提示音。 (2)扩展功能:(能完成的加分) 通过遥控器跳线改变用户码,EDA实验板上用三个发光二极管正确显示发送端的用户码。 二、解题分析 根据题目意思,此设计关键在于如何将接收器接收到的信号解码并显示。这是本设计的难点所在。其中解码的信号来源有两种,分别是: 一、从键盘上直接按键输入。二、从遥控器上按键以后将信号发射出去,然后键盘上的接收器将其接收。这当中有一个优先权的问题,在本次设计中我将其设置为遥控器接收优先,即,当在按下键盘后,若此时遥控也按下则显示数码管优先显示遥控器按下的信号。
随车起重机(随车吊)改装无线遥控器的功能和作用
随车起重机(随车吊)改装无线遥控器的功能和作用 1.视野清楚: 普通随车起重机操作位置一般在支腿旁边或者配置上车操作座椅,距离物品的起吊位置一般都比较远。由于操作位置固定,操作者目视吊钩的角度受限,很难准确的判断距离。特别是上车操作座椅的方式,因其顺吊臂一同旋转,始终正面面对吊钩,很难判断物品的前后距离,易发生事故。所以一般都需要两个人配合,一人负责操作起重机,另一人在起吊物品附件观察情况,指挥操作,但指挥的声音和手势会引起误判。 而配有无线遥控器的随车起重机,使用无线遥控器不受操作位置的影响,可以任意移动、始终站在起吊物品的附件观察情况,大大减低了事故的发生率。 2. 操作的方便快捷性 普通随车起重机,都需要扳动较为笨重的操作手柄,长时间工作,操作者很容易出现疲劳的情况。如果是配操作座椅的,还需要爬上爬下的,更是非常的麻烦。而且,受天气情况影响也比较大,出现下雨下雪的时候,操作者就很不舒服。工作效率受到无谓的影响太多,因此工作效率较低。 而配有无线遥控器的随车起重机,只需要按几个按钮,就可以实现起重机的操作,工作非常的轻松愉快,更不用爬上爬下到操作座椅了。在不好的天气情况下,完全可以在室内或者驾驶室里进行操作工作。大大提高了工作的效率,可以创造能多的财富。 3. 操作者的安全性 普通随车起重机,操作工作时必须站在起重机的旁边,甚至是起重机的上面。如果出现意外翻车、折臂等恶性事故时,操作者很容易受伤,甚至威胁到生命安全。 而配有无线遥控器的随车起重机,由于操作工作时,都远离起重机,如果出现意外翻车、折臂等恶性事故时,都不会对操作者有任何的伤害。因此使用无线遥控器操作起重机,会更安全。 4. 经济性
常用红外遥控协议
常用红外遥控协议 一、NEC协议 NEC Protocol To my knowledge the protocol I describe here was developed by NEC. I've seen very similar protocol descriptions on the internet, and there the protocol is called Japanese Format. I do admit that I don't know exactly who developed it. What I do know is that it is used in my late VCR produced by Sanyo and was marketed under the name of Fisher. NEC manufactured the remote control IC. This description was taken from the VCR's service manual. Those were the days, when service manuals were fulled with useful information! Features ?8 bit address and 8 bit command length ?Address and command are transmitted twice for reliability ?Pulse distance modulation ?Carrier frequency of 38kHz ?Bit time of 1.125ms or 2.25ms Modulation The NEC protocol uses pulse distance encoding of the bits. Each pulse is a 560μs long 38kHz carrier burst (about 21 cycles). A logical "1" takes 2.25ms to transmit, while a logical "0" is only half of that, being 1.125ms. The recommended carrier duty-cycle is 1/4 or 1/3. Protocol
塔式起重机安全装置
塔式起重机安全装置简介 张继 1、塔吊简介 1.1、标准规定编号方式 按ZBJO4008执行,我国塔机型号组成为:类组代号+形式+特性代号+主参数代号。 类:Q——(起) 组:T——(塔) 型:上回转自升式Z——(自)固定式G——(固)内爬式P——(爬)下回转自升式S(升) 主参数为公称起重力矩。 标记示例如下: 公称起重力矩600kNm固定式塔机:QTG600 公称起重力矩1000kNm自升式塔机:QTZ1000 有些塔机仍以tm为起重机力矩计量单位,则上述三种塔机型号分别表示为QTG60,QTZ100。 1.2、塔吊使用年限 下列三类塔吊,超过年限的由有资质评估机构评估合格后,方可继续使用: ⒈630kN.m以下(不含630kN.m)、出厂年限超过10年(不含10年)的塔机; ⒉630~1250kN.m(不含1250kN.m)、出厂年限超过15年(不含15年)的塔机; ⒊1250kN.m以上、出厂年限超过20年(不含20年)的塔机。
2、塔吊平面布置 在确定塔吊的安设位置应尽量满足下列要求: 1、塔吊安设处在安装和拆卸时,应便于运输塔吊部件的载重汽车和平板拖车进出和布置汽车吊; 2、塔吊安设位置应尽量靠近电源; 3、一次安装能完成整体工程施工,避免二次移位; 4、避免施工平面上出现死角; 5、平衡臂在回转过程中有无与建筑物突出部分发生矛盾的可能; 6、便于塔吊附臂;标准附臂3.5m 7、在多台塔吊同在一个区域作业条件下,应处理好相邻塔吊存在塔臂交叉重叠作业的塔身高度差,以防止相邻塔吊相互干扰作业; 8、周密考虑并处理好塔吊的顶升机构朝向(与施工升降机影响)、锚固以及竣工后降塔、拆卸附着装置以及解体转场过程中每一环节的具体矛盾,在多台塔吊处于同一区域作业时,应考虑高度差和顶升顺序; 9、注意建筑物悬挑部分以及外脚手架的搭设方式,以免与塔吊突出部分如顶升工作平台等发生矛盾。塔吊与建筑物外边缘宜在3~5米之间,最小距离不得低于2米; 10、两台起重机之间的最小架设距离应保证处于高位起重机的最低位置的部件与低位置起重机中处于最高位置的部件之间的垂直距离不得小于2m; 11、便于建材、构件及设备的吊装、堆放; 12、避免选在橡皮土等不良土区,松土应夯实; 13、避开窨井、暗沟、防空洞及埋地的水、电、气、通讯管线;
红外遥控解码原理
红外线遥控器解码原理 红外线遥控是目前使用最广泛的一种通信和遥控手段。由于红外线遥控装置具有体积小、功耗低、功能强、成本低等特点,因而,继彩电、录像机之后,在录音机、音响设备、空凋机以及玩具等其它小型电器装置上也纷纷采用红外线遥控。工业设备中,在高压、辐射、有毒气体、粉尘等环境下,采用红外线遥控不仅完全可靠而且能有效地隔离电气干扰。 1 红外遥控系统 通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集成电路芯片来进行控制操作,如图1所示。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。 2 遥控发射器及其编码 遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC的uPD6121G组成发射电路为例说明编码原理。当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。这种遥控码具有以下特征: 采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图2所示。 上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。然后再通过红外发射二极管产生红外线向空间发射,如图3所示。
UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。UPD6121G 最多额128种不同组合的编码。 遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间,图4为发射波形图。 当一个键按下超过36ms,振荡器使芯片激活,将发射一组108ms的编码脉冲,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码 (9ms~18ms),高8位地址码(9ms~18ms),8位数据码(9ms~18ms)和这8位数据的反码(9ms~18ms)组成。如果键按下超过108ms仍未松开,接下来发射的代码(连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。 代码格式(以接收代码为准,接收代码与发射代码反向) ①位定义 ②单发代码格式 ③连发代码格式 注:代码宽度算法: 16位地址码的最短宽度:1.12×16=18ms 16位地址码的最长宽度: 2.24ms×16=36ms 易知8位数据代码及其8位反代码的宽度和不变:(1.12ms+2.24ms)×8=27ms ∴32位代码的宽度为(18ms+27ms)~(36ms+27ms)