基于CAN总线的倒车雷达系统

2009 International Conference on Industrial Mechatronics and Automation
978-1-4244-3818-1/09/$25.00 ?2009 IEEE ICIMA 2009
Reversing Radar System Based on CAN Bus
Xiao Chen
Department of Electronic Information Engineering Nanjing University of Information Science and Technology
Nanjing 210044, China rainofsun@https://www.wendangku.net/doc/b36930758.html,
Abstract —To reduce the traffic accidents when backing and parking, we develop a sort of vehicle reverse sensor alarming system based on the CAN bus. The system can be divided into the range acquisition module, the system control module, the bus node controller and the display alarm module. The range
acquisition subsystem adopts the ultrasonic technology to
measure the distance between the vehicle and the obstacle real
time. The system control module takes P89V51RD2 single
chip microcomputer as the main processing unit to control the
running of the whole system and control various interface
circuits. The reverse sensor system connects with the auto digitization platform through the CAN bus, and realizes the automatic self-correction of the detecting system according to the data sharing. The system can eliminate the puzzle induced by the parking and starting, enhance the security of the
driving, reduce the traffic accidents and decrease the
manufacturing cost. The system is convenient to be extended
in the market.
Keywords- Reversing radar; CAN Bus; ultrasound; vehicle electronics; P89V51RD2
I. I NTRODUCTION
With the quick development of Chinese auto industry [1], the quantity of auto increases year by year. The park places and stresses are more and more crowded. When parking in crowded and narrow place, the drivers will be overcautious and indecisive and accidents will happen often. To increase the backsight ability of the auto, the research about the reverse sensor detecting the obstacle at the rear of the auto such as parking assistant systems has become into the spot hot in recent years [2-5].
With the enhancement of the intelligent requirement for the auto assistant drive system and the network development of the auto electron system, new reverse sensor can successively measure the distance and display the distance of the obstacle, and transmit the data to the bus of the auto. As one part of the auto electric control system [6,7], the reversing radar system is very important to prevent the rear collision [8,9]. To enhance the harmony of various systems, optimize the total performance of the auto, save the cost and increase the comfort ability, convenience and security of the auto, the auto high speed LAN communication network must be established. The CAN bus of the controller is a sort of serial data bus developed by the German Bosch Company in the beginning of 1980s in order
to solve the problem of data exchange of numerous control and testing instruments in modern auto [10,11]. Because it adopted the technologies such as short frame data structure and non-destructive bus arbitration, it possessed many characteristics such as high reliability and strong timeliness.
Based on CAN bus, the system combines with single chip microcomputer technology, range acquisition technology and sensor technology, transmits the alarm real time according to the distance between the auto and the obstacle, and implements grade alarm according to the distance. The reverse sensor system connects with the auto digitization platform through the CAN bus, and realizes the automatic self-correction of the detecting system according to the data sharing. The system is convenient to be
extended in the market. II. S YSTEM D ESIGN
The system is the auto reserve sensor alarm system based on CAN bus. The front sensor and the rear sensor of the auto are independent each other, and they are respectively controlled by each subsystem which transmit the data to the main controller through the CAN bus and the interface. The sub-controller is designed according to the idea of modularization. The system can be divided into the range acquisition module, the system control module, the bus node controller and the display alarm module. The range acquisition system completes the function by the transmitting system, the accepting system and the control system together. The control system takes the microprocessor as the control core to control the running of the whole system and control various interface circuits. It transmits pulses and detecting the echoes through controlling the multiple-selection switch, implements data processing, samples the time difference, measures the time difference from transmitting the ultrasonic signals to accepting ultrasonic signals, and measures the distance. The display alarm system displays the minimum distance and alarms to remind the driver.
III. H ARDWARE
The reverse sensor alarm system is mainly used to measure the distance between the rear of the auto and the obstacle. The hardware design includes designs of the range acquisition system, the single chip microcomputer
control system, the bus node controller and the display alarm system.
The range acquisition system is composed of the ultrasonic transmitting module and the ultrasonic accepting module. When detecting the object by the ultrasonic, the object can not be destructed and the detection can be remotely controlled. The ultrasonic transmitter includes the ultrasonic generation circuit and the ultrasonic control circuit, and the type of the detector is UCM-T40KI.
The quantity selection of sensor should ensure the minimization of the information when acquiring the environmental information, and ensure the time adaptability parameter achieves the maximum under the premise that the quantity is confirmed. Considering the input and output points such as the formation of the vehicle, the demand of running and the program control. Each one sensor should be installed at the two ends of the front bumper to detect the front obstacles, and the other four sensors are installed at the rear bumper. These six detectors adopt the scanning method and share one signal processing circuit.
The transmitting circuit offers the electric pulse signals needed by the ultrasonic transmitter. The ultrasonic is generated by the software generation method. The ultrasonic signals are generated by the software and transmitted to the driver through the output pin and driven by the driver to push the detector to generate the ultrasonic. The characteristic of this method is that the software can be fully utilized and the flexibility is good. The ultrasonic is generated by the oscillation of 555-time base circuit. To ensure that the 555 time base circuit has sufficient drive ability, 12V-power supply should be adopted as shown in Fig. 1 [12].
The drive circuit can offer the pulse signals with sufficient power for the ultrasonic transmitter. Ultrasonic electric pulse with certain power, pulse width and frequency should be generated to stimulate the transmitter which converts the electric energy into the ultrasonic mechanical energy. We adopt CMOS chip CD4069 to
compose the ultrasonic drive circuit.
Figure 1. The transmitting circuit [12].
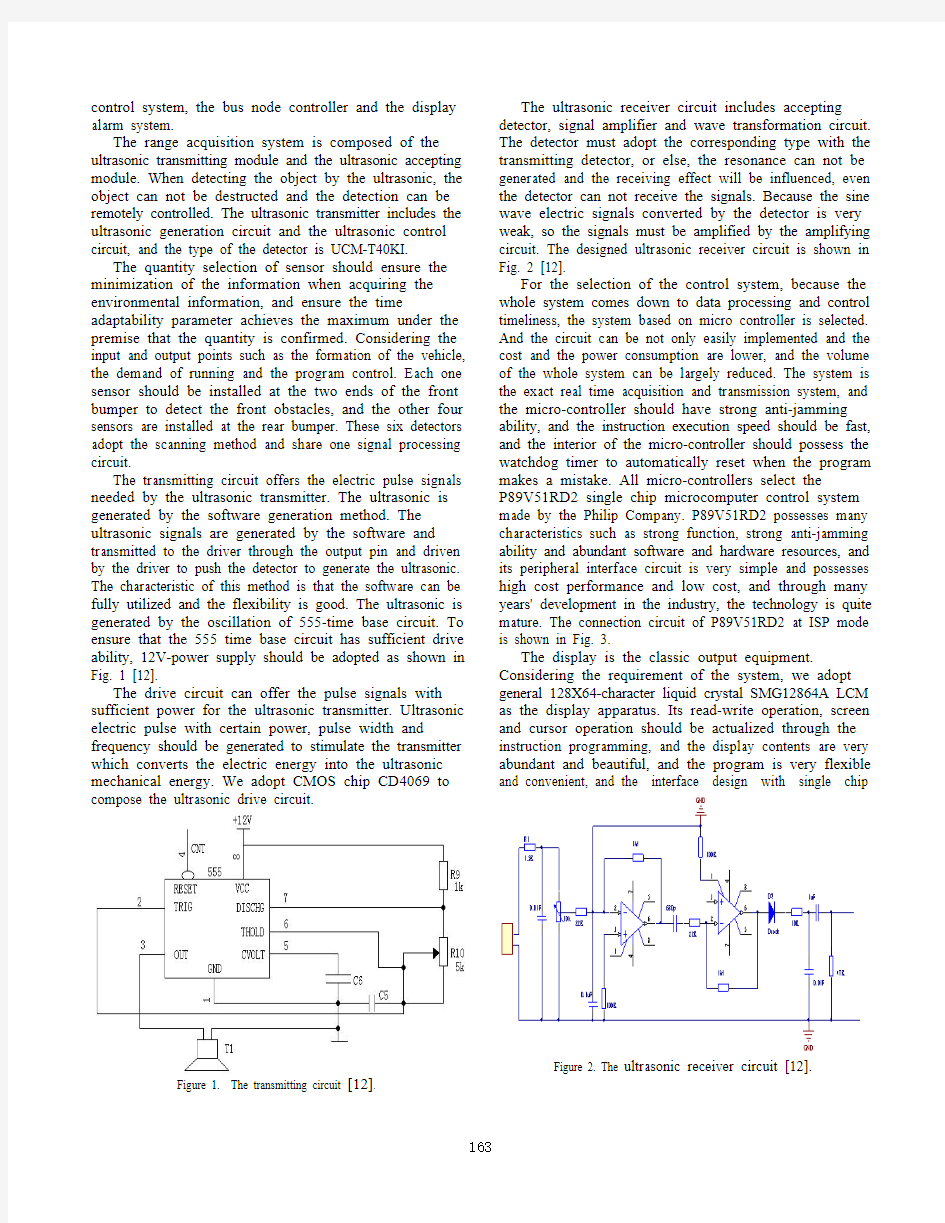
The ultrasonic receiver circuit includes accepting detector, signal amplifier and wave transformation circuit. The detector must adopt the corresponding type with the transmitting detector, or else, the resonance can not be generated and the receiving effect will be influenced, even the detector can not receive the signals. Because the sine wave electric signals converted by the detector is very weak, so the signals must be amplified by the amplifying circuit. The designed ultrasonic receiver circuit is shown in Fig. 2 [12].
For the selection of the control system, because the whole system comes down to data processing and control timeliness, the system based on micro controller is selected. And the circuit can be not only easily implemented and the cost and the power consumption are lower, and the volume of the whole system can be largely reduced. The system is the exact real time acquisition and transmission system, and the micro-controller should have strong anti-jamming ability, and the instruction execution speed should be fast, and the interior of the micro-controller should possess the watchdog timer to automatically reset when the program makes a mistake. All micro-controllers select the P89V51RD2 single chip microcomputer control system made by the Philip Company. P89V51RD2 possesses many characteristics such as strong function, strong anti-jamming ability and abundant software and hardware resources, and its peripheral interface circuit is very simple and possesses high cost performance and low cost, and through many years' development in the industry, the technology is quite mature. The connection circuit of P89V51RD2 at ISP mode is shown in Fig. 3.
The display is the classic output equipment. Considering the requirement of the system, we adopt general 128X64-character liquid crystal SMG12864A LCM as the display apparatus. Its read-write operation, screen and cursor operation should be actualized through the instruction programming, and the display contents are very abundant and beautiful, and the program is very flexible
and convenient, and the interface design with single chip
Figure 2. The ultrasonic receiver circuit [12].
Figure 3. The connection circuit.
microcomputer is very simple and convenient. Only the single chip microcomputer transfer display data to relative display interface, the display work can be completed, which can save the time of SCM and ensure the normal operation of the main program.
The alarm circuit is to make the sound to remind the driver when the distance detected by the reserve sensor is smaller than the set safe value in Fig. 4 [13].
IV. S OFTWARE
The software design adopts C programming and respectively programs different functional modules by the modularization program design idea for the transfer, so the hierarchy and structure of the software will be clearer for the debugging and modification of the software.
The software part of the ultrasonic range acquisition system adopts the idea of the modularization design to divide the system into the main program module, the initialization processing module, the interrupt testing module, the delay processing module, the data processing module, the temperature measurement module and the display module. The software system structure is shown in
Fig. 5.
Figure 4. The alarm circuit [13].
Figure 5. The software structure.
V. C ONCLUSION
Vehicle electronics have found more and more applications in modern vehicles, bringing great convenience to the public as well. In this article, we adopt the cheap single chip microcomputer as the control centre and integrate many technologies and theories such as the computer technology, the ultrasonic range acquisition technology and the control theory to design the reserve sensor alarming system based on the CAN bus. The system can effectively display the distance between the obstacle and the auto and send the alarm signals in time according to the distance. The system can eliminate the puzzle induced by the parking and starting, enhance the security of the driving, reduce the traffic accidents and decrease the manufacturing cost. The system is convenient to be extended in the market.
A CKNOWLEDGMENT
The work is supported by the Basic Research Program (Natural Science Foundation) of Jiangsu Province of China (Granted No. BK2007601) and "Qing Lan Gong Cheng" program of Jiangsu Province of China.
R EFERENCES
[1] Qinghua Zhu, Joseph Sarkis, Kee-hung Lai, Green supply chain
management: pressures, practices and performance within the
Chinese automobile industry, Journal of Cleaner Production, Volume 15, Issues 11-12, 2007, Pages 1041-1052.
[2]Ho Gi Jung, Dong Suk Kim, Pal Joo Yoon, Jaihie Kim. Light stripe
projection based parking space detection for intelligent parking assist system. In: IEEE intelligent vehicles symposium, June 2007. 962–8.
[3]Ho Gi Jung, Jaihie Kim, Model-based light stripe detection for
indoor navigation, Optics and Lasers in Engineering, Volume 47, Issue 1, January 2009, Pages 62-74.
[4]Jae Kyu Suhr, Ho Gi Jung, Kwanghyuk Bae, Jaihie Kim, Outlier
rejection for cameras on intelligent vehicles, Pattern Recognition Letters, Volume 29, Issue 6, 15 April 2008, Pages 828-840.
[5]Fintze1, K., Bendahan, R., Vestri, C., Bougnoux, S., 2004. 3D
Parking assistant system. Proceedings of the IEEE Intelligent Vehicles Symposium, pp. 881–886.
[6]Feizhou Zhang, Xuejun Cao, Dongkai Yang, Intelligent Scheduling
of Public Traffic Vehicles Based on a Hybrid Genetic Algorithm, Tsinghua Science & Technology, Volume 13, Issue 5, October 2008, Pages 625-631
[7]Hongbo Lan, Chengrui Zhang, Hongbin Li, An open design
methodology for automotive electrical/electronic system based on
quantum platform, Advances in Engineering Software, Volume 39, Issue 6, June 2008, Pages 526-534
[8]Jung, H.G., Kim, D.S., Yoon, P.J., Kim, J., 2006. Parking slot
markings recognition for automatic parking assist system. In: Proc.
IEEE Intell. Vehicles Symp., pp. 106–113.
[9]Vestri, C., Bougnoux, S., Bendahan, R., Fintzel, K., Wybo, S., Abad,
F., Kakinami, T., 2005. Evaluation of a vision-based parking
assistance system. In: Proc. 8th Internat. IEEE Conf. Intell. Transport.
Syst., pp. 56–60.
[10]Wang Liming, Shao Ying, Wang Mingzhe, Shan Yong. D Research
of improving the dynamic scheduling algorithm in the CAN bus control networks, Journal of Systems Engineering and Electronics, Volume 19, Issue 6, December 2008, Pages 1250-1257
[11]Dogan Ibrahim, Advanced PIC18 Projects—CAN Bus Projects,
Advanced PIC Microcontroller Projects in C, 2008, Pages 475-514. [12]Li W, SU P. The Design of Ultrasonic Range finder Based on
Communications of CAN bus. Vehicle & Power Technology.
2007(4): 64-66.
[13]Teng Z. Reversing Radar design based on ultrasonic wave
mesurement. Today electrionics. 2006, 9: 78-80
基于STC89C51的CAN总线点对点通信模块设计
基于STC89C51的CAN总线点对点通信模块设计 [导读]随着人们对总线对总线各方面要求的不断提高,总线上的系统数量越来越多,继而出现电路的复杂性提高、可靠性下降、成本增加等问题。为解决上述问题,文中阐述了基于SJAl000的CAN总线通信模块的实现方法,该方法以PCA82C250作为通信模块的总线收发器,以SITA-l000作为网络控制器。并以STCSTC89C5l单片机来完成基于STC89C5l的CAN通信硬件设计。文章还就平台的初始化、模块的发送和接收进行了设计和分析。通过测试分析证明,该系统可以达到CAN的通信要求,整个系统具有较高的实用性。 0 引言 现场总线是应用在生产最底层的一种总线型拓扑网络,是可用做现场控制系统直接与所有受控设备节点串行相连的通信网络。在工业自动化方面,其控制的现场范围可以从一台家电设备到一个车间、一个工厂。一般情况下,受控设备和网络所处的环境可能很特殊,对信号的干扰往往也是多方面的。但要求控制则必须实时性很强,这就决定了现场总线有别于一般的网络特点。此外,由于现场总线的设备通常是标准化和功能模块化,因而还具有设计简单、易于重构等特点。 1 CAN总线概述 CAN (Controller Area Network)即控制器局域网络,最初是由德国Bosch公司为汽车检测和控制系统而设计的。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。其良好的性能及独特的设计,使CAN总线越来越受到人们的重视。由于CAN总线本身的特点,其应用范围目前已不再局限于汽车行业,而向自动控制、航空航天、航海、过程工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械及传感器等领域发展。目前,CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。它的直线通信距离最大可以达到l Mbps/30m.其它的节点数目取决于总线驱动电路,目前可以达到110个。 2 CAN系统硬件设计 图1所示是基于CAN2.0B协议的CAN系统硬件框图,该系统包括电源模块、MCU部分、CAN控制器、光电耦合器、CAN收发器和RS232接口。硬件系统MCU采用STC89C5l,CAN控制器采用SJAl000,CAN收发器采用PCA82C250,光耦隔离采用6N137。
CAN总线设计
微机应用课程设计报告 ` 题目:基于单片机的16*16点阵系统设计 专业: … 班级: 姓名: 学号: 地点: 时间: 指导老师:
~
摘要 现场总线是自动化领域的计算机网络,是当今自动化领域技术发展的热点之一。它以总线为纽带,将现场设备连接起来成为一个能够相互交换信息的控制网络,是一种双向串行多节点数字通信的系统。CAN总线也是现场总线的一种,它最初被应用于汽车的控制系统中,由于其卓越的性能,CAN总线的应用范围已不再局限于汽车工业中,而被广泛的用到自动控制、楼宇自动化、医疗设备等各个领域。 本文主要介绍一种基于CAN总线的控制系统,通过对这一系统的制作流程来说明CAN总线的简单应用,文章主要是对本控制系统的三个硬件模块进行介绍及模块中相关芯片的应用,同时本文也对软件的编写进行了说明。 关键字:现场总线; CAN总线;单片机;控制系统
目录 1 绪论 (1) CAN总线的简单介绍 (1) CAN总线的优势 (1) 网络各节点之间的数据通信实时性强 (2) 缩短了开发周期 (2) 已形成国际标准的现场总线 (2) 最有前途的现场总线之一 (2) 2 硬件电路设计 (3) 单片机模块 (3) STC89C52主要特性如下: (4) STC89C52RC单片机的工作模式 (5) CAN总线控制器模块 (6) SJA1000简介 (6) PCA82C250简介 (9) 通信模块和外围接口 (11) 通信模块 (11) 外围接口 (12) 3 CAN总线控制系统软件设计 (13) 初始化程序 (13) 数据的接收和发送功能 (15) 发送数据 (15) 接收数据 (17) 4 总结 (19) 参考文献 (20) 附录一 (21)
CAN总线网络设计
1 引言 can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。由于can总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。 can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。 2 系统总体方案设计 整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。 网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。本设计can总线传输介质采用双绞线。 图 1 can总线网络系统结构 3 can总线智能网络节点硬件设计 本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。该智能节点的电路原理图如图2所示。该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步
课程设计--CAN总线
课程设计 题目 CAN通信 二级学院电子信息与自动化 专业自动化 班级 107070103 学生姓名学号 指导教师熊文 考核项目 设计50分平时 成绩 20分 答辩30分 设计质量 20分 创新设计 15分 报告质量 15分 熟练程度 20分 个人素质 10分 得分 总分考核等级教师签名
摘要: CAN总线是控制器局域网总线(contr01ler AreaNetwork)的简称。属于现场总线的范畴,是一种有效支持分布式控制或实时控制的串行通信网络。由于其高性能、高可靠性及独立的设计而被广泛应用于工业现场控制系统中。SJAl000是一个独立的CAN控制器,PCA82C200的硬件和软件都兼容,具有一系列先进的性能,特别在系统优化、诊断和维护方面,因此,SJAl000将会替代PCA82C200。SJAl000支持直接连接到两个著名的微型控制器系列80C51和68xx。下面以单片机AT89C52和SJAl000为例,介绍CAN总线模块的硬件设计和CAN通信软件的基本设计方法。 关键词:AT89S52 CAN通信 SJA1000
目录: (一) 背景: (二) CAN介绍 (三) SJA1000内部结构和功能简介 (四) 硬件电路图 (五) 初始化程序 (六) 测试 (七) 总结
一背景: CAN(Controller Area Network)数据总线是一种极适于汽车环境的汽车局域网。CAN总线是德国Bosch公司为解决汽车监控系统中的 复杂技术难题而设计的数字信号通信协议,它属于总线式串行通信网 络。由于采用了许多新技术和独特的设计思想,与同类车载网络相比,CAN总线在数据传输方面具有可靠、实时和灵活的优点。 1991年9月Philips半导体公司制定并发布了CAN技术规范(版本 2.0),该技术规范包括A部分和B两部分,其中2.0A给出了CAN报文的标 准格式;2.0B给出了标准和扩展两种格式。此后,1993年11月ISO正 式颁布了道路交通运输工具一数据信息交换一高速通信控制器局域 网(CAN)的国际标准IS011898,为控制器局域网的标准化和规范化铺 平了道路。 二CAN介绍 CAN通信的特点: (1) CAN是到目前为止唯一具有国际标准且成本较低的现场总线; (2) CAN废除了传统总线的站地址编码,对通信数据块进行编码,为 多主方式工作,不分主从,通信方式灵活,通过报文标识符通信,可 使不同的节点同时接收到相同的数据,无需站地址等节点信息。 (3) CAN采用非破坏性总线仲裁技术,当多个节点同时向总线发送信 息时,优先级较低的节点会主动地退出发送,而最高优先级的节点可 不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。尤其 是在网络负载很重的情况下也不会出现网络瘫痪情况(以太网则有可
CAN总线设计(最终版)(1)
CAN-USB适配器设计 ***** 指导老师:*** 学院名称:***** 专业班级:**** 设计提交日期:**年**月 摘要 随着现场总线技术和计算机外设接口技术的发展,现场总线与计算机快速有效的连接又有了更多的方案。USB作为一种新型的接口技术,以其简单易用、速度快等特点而备受青睐。本文介绍了一种基于新型USB接口芯片CH372的CAN总线网络适配器系统的设计,提出了一种使用USB接口实现CAN总线网络与计算机连接
的方案。利用芯片CH372可在不了解任何USB协议或固件程序甚至驱动程序的情况下,轻松地将并口或串口产品升级到USB接口。该系统在工业现场较之以往的系统,可以更加灵活,高速,高效地完成大量数据交换,并可应用于多种控制系统之中,具有很大的应用价值。 关键词:USB;CH372;CAN;SJA100;适配器 目录 1.设计思想 (3) 2.CAN总线与USB的转换概述 (4) 3. 适配器硬件接口设计 (5) 3.1 USB接口电路 (5)
3.2 CAN总线接口电路 (7) 4.USB通用设备接口芯片CH372 (8) 4.1 概述 (8) 4.2 引脚功能说明 (9) 4.3 内部结构 (9) 4.4 命令 (10) 5.软件设计 (10) 5.1 概述 (10) 5.2主监控程序设计 (12) 5.3 CAN和USB接口芯片的初始化 (13) 5.4 CAN报文的发送 (15) 5.5 CAN报文的接收 (17) 5.6.自检过程 (19) 5.7 USB下传子程序设计 (20) 5.8 USB上传子程序设计 (22) 5.9.USB—CAN转换器计算机端软件设计 (23) 6. 抗干扰措施 (25) 7. 估算成本 (26) 8. 应用实例介绍 (27) 9 总结及设计心得 (28) 10 参考文献 (28) 1 设计思想 现场总线网络技术的实现需要与计算机相结合。目前,在微机上扩展CAN总线接口设备一般采用PCI总线或者RS-232总线。PCI虽然仍是高速外设与计算机接口的主要渠道,但其主要缺点是占用有限的系统资源、扩展槽地址;中断资源有限;并且插拔不方便;价格较贵;而且设计复杂、需有高质量的驱动程序保证系统的稳定;且无法用于便携式计算机的扩
CAN总线系统设计中的几个问题
CAN总线系统设计中的几个问题 北京航空航天大学管理学院(100083) 邬宽明 摘 要:论述了CAN总线系统设计中系统时钟和位时间的选定、CAN中断服务程序编制以及较长报文拼接等问题。 关键词:CAN总线设计 系统时钟 位时间 中断服务 报文拼接 CAN总线是德国Bo sch公司在80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信总线,它是一种多主总线系统,通信介质可以是双绞线、同轴电缆或光导纤维。通信速率可达1M bp s。CAN总线通信控制器中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括零位的插入 删除、数据块编码、循环冗余检验、优先级判别等项工作。CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点是可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位(按CAN技术规范210A)或29位(按CAN 技术规范210B)二进制数组成,因此可以定义211或229个不同的数据块。这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。CAN的这些卓越特性,极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界重视,并已被公认为最有前途的现场总线之一。1993年11月ISO正式颁布了道路交通运载工具—数字信息交换—高速通信控制器局部网(CAN)国际标准(ISO11898)。为控制器局部网标准化、规范化推广铺平了道路。可以预料,控制器局部网在我国迅速发展和普及是指日可待的。 本文分别论述CAN总线系统设计中经常遇到的系统时钟和位时间如何选定、CAN中断服务程序如何安排以及较长报文如何拼接等几个问题。 1 系统时钟和位时间的选定 在CAN控制器中提供两个总线定时寄存器,其中总线定时寄存器0(BR T0)可决定波特率予分频(BR P)和同步跳转宽度(SJW)的数值,其低六位(D5~D0)用来确定系统时钟,而其高二位(D7,D6)用来确定同步跳转宽度(SJW)。总线定时寄存器1(BR T1)可决定位周期宽度、采样点位置和在每个采样点进行采样的次数,其D3~D0用于T SEG1,而D6~D4用于T SEG2并按下式计算: t TSEG1=t SCL(8T SEG1.3+4T SEG1.2+2T SEG1.1 +T SEG1.0+1) t TSEG2=t SCL(4T SEG2.2+2T SEG2.1+T SEG2.0+1) 图1 每位时间和采样点位置T SEG1和T SEG2可 确定每位的时钟周期数目 和采样点位置,如图1所 示 若P8XC592复位请求 位被置为高,这两个寄存器 均可被访问(读 写)。系统时 钟t SCL可使用下列等式计算: t SCL=2t CL K(32BR P.5+16BR P.4+8BR P.3+4BR P.2 +2BR P.1+BR P.0+1) 其中:t CL K为P8XC592振荡器的时钟周期 实例:设晶体振荡器频率为16M H Z,BTR0=00H, BTR1=14H,计算系统时钟和位时间 由给定BTR0和BR T1值可知: BR P.5,BR P.4,BR P.3,BR P.2,BR P.1和BR P10均为0,另外,除T SEG112和T SEG210为1外,其余系数均为01因此有, t SCL=2t CL K(32×0+16×0+8×0+4×0+2×0 +0+1)=2t CL K t TSEG1=t SCL(8×0+4×0+2×0+1)=5t SCL t TSEG2=t SCL(4×0+2×0+1×0+1)=2t SCL t b=(1+5+2)t SCL=2×8×t CL K=1M bp s 此时同步跳转宽度(SJW)为 t SJW=t SCL(2SJW.1+SJW.01+1)=t SCL即1 8(Λs)实例2:设晶体振荡器频率为16M H z,BTR0= 7FH,BTR1=7FH,计算系统时钟和位时间 由给定BR T0和BR T1值可知: BR P15,BR P14,BR P13,BR P12,BR P11,和BR P10,均为1,另外,T SEG11X和T SEG21X亦均为 81四通电脑应用美国德州工控机6257723062577231 《电子技术应用》1998年第9期
CAN总线系统智能节点设计
https://www.wendangku.net/doc/b36930758.html, CAN总线系统智能节点设计 作者:邹继军饶运涛 信息工程系 华东地质学院 摘要:CAN总线上的节点是网络上的信息接收和发送站;智能节点能通过编程设置工作方式、ID地址、波特率等参数。它主要由单片机和可编程的CAN通信控制器组成。本文介绍这类节点的硬件设计和软件设计;其中软件设计包括SJA1000的初始化、发送和接收等应用中的最基本的模块子程序。 关键词:总线节点CAN 控制器 引言: CAN (Controller Area Network)总线,又称控制器局域网,是Bosch公司在现代汽车技术中领先推出的一种多主机局部网,由于其卓越的性能、极高的可靠性、独特灵活的设计和低廉的价格,现已广泛应用于工业现场控制、智能大厦、小区安防、交通工具、医疗仪器、环境监控等众多领域。CAN已被公认为几种最有前途的现场总线之一。CAN总线规范已被ISO国际标准组织制订为国际标准,CAN 协议也是建立在国际标准组织的开放系统互连参考模型基础上的,主要工作在数据链路层和物理层。用户可在其基础上开发适合系统实际需要的应用层通信协议,但由于CAN总线极高的可靠性,从而使应用层通信协议得以大大简化。 CAN总线与其他几种现场总线比较而言,是最容易实现、价格最为低廉的一种,但其性能并不比其他现场总线差。这也是目前CAN总线在众多领域被广泛采用的原因。节点是网络上信息的接收和发送站,所谓智能节点是由微处理器和可编程的CAN控制芯片组成,它们有两者合二为一的,如芯片P8XC592,也有如本文介绍的,独立的通信控制芯片与单片机接口,后者的优点是比较灵活。当然,也
基于STM32F407的双CAN总线设计与实现
基于STM32F407的双CAN总线设计与实现 【摘要】本文是基于意法半导体(ST)新推出的一款高性能CortexTM-M4内核的ARM 芯片STM32F407ZGT6,进行的双CAN总线设计。在开发过程中采用了ST提供的可视化图形界面开发工具STM32Cube进行底层驱动的配置,简化了设计工作。但由于该工具链接的固件库函数存在传递参数错误,使得CAN总线无法接收数据,本文对该库函数进行了更正。 【关键词】STM32F407;CAN;STM32Cube Design and Realization of Double CAN Buses on STM32F407 LIU Peng (Chinese Electron Scientific and Technological Company 20th Institute,Xi’an Shaanxi 710068,China) 【Abstract】Based on a high-performance ARM with CortexTM-M4 core which launched by STMicroelectronics (ST)--STM32F407ZGT6,the double CAN bus is designed in this paper. A visual graphical interface-STM32cube which is provided by ST,is used to configure the underlying driver in this development process. It simplifies the design work. However,
CAN总线技术在汽车中的应用
技术导向 CAN总线技术在汽车中的应用 【摘要】文章首先概述了CAN总线技术,并详细阐述了CAN总线技术的特点和优点,及其结构和数据,传输原理,从而引出CAN总线研究的重点、关键技术及其在现代汽车上的应用现状和发展趋势。 【主题词】CAN总线汽车应用 前言 近20年来,随着现代电子技术、信息技术的发展,汽车上由电子控制单 元(ECU)控制的部件数量越来越多,例如,数字式电控燃油喷射系统(DEFI)、 废气再循环控制系统(EGR)、防抱死制动系统(ABS)、防滑控制系统(ASR)、 牵引力控制系统(TRC)、车辆稳定控制系统(VSC)、巡航系统(CCS)等等。 大量传感器、集成电路和计算机芯片等电子元器件在汽车上的广泛应用, 在提高汽车动力性、经济性、舒适性和安全性的同时,也带来其他问题: (1)电子设备的大量应用必然导致车身布线愈来愈复杂、运行可靠性降低、故障维修难度增大,必然造成庞大的布线系统。比如在沃尔沃公司生产的S80型轿车中,所安装的电缆长达1200 m,有54根保险丝。从材料成本和工作效率看,传统布线方法都将不能适应汽车的发展。 (2)上述DEFI、EGR、ABS、ASR等子系统对控制信息的共享和实时性的要求,需要共享发动机转速、车轮转速、油门踏板位置等公共数据,同时各个子系统对实时性的要求因为数据的更新速率和控制周期的不同而有 差别。传统的线缆已远远不能满足这种需求。 (3)为了使不同厂家生产的部件能在同一辆汽车中协调工作,必须按照
某种约定的标准来解决其状态信号和控制信息的传递问题。针对上述问题,在借鉴计算机网络技术和现场控制技术的基础上,诞生了各种适用于汽车环境的汽车网络技术。经过长时间发展,已形成Hart、Lonworks、Profibus、Bitbus及CAN等多种现场总线协议。CAN是控制器局域网络的简称,它由德国的Bosch公司及几个半导体生产商开发的,CAN总线是一种串行多主站控制器局域网总线。它具有很高的网络安全性、通讯可靠性和实时性,简单实用,网络成本低。特别适用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。因此CAN总线在诸多总线中独占鳌头,逐渐成为汽车总线的代名词。 1、CAN总线技术的特点和优点 CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。其主要特性如下: (1)具有较高的性价比。它结构简单,器件容易购置,每个节点的价格较低,而且开发过程中能充分利用现在的单片机开发工具; (2)是目前为止唯一有国际标准的现场总线; (3)为多主方式工作,网络上任一节点均可在任意时刻主动向网络上其他节点发送信息而不分主从,通信方式灵活,且无需站地址等节点信息; (4)网络上的节点信息分成不同的优先级, 可满足不同的实时要求,高优先级的数据最多可在134μs内得到传输; (5)采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动地退出发送,而最高优先级的节点不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。尤其是在网络负载很重的情
CAN总线硬件设计
EDN-CAN总线助学【之八】-CAN总线硬件设计 这一讲我们详细介绍一下CAN总线通讯模块的硬件设计:CAN总线学习板上C AN通讯模块的设计。包括三个部分:(1)与CPU的接口;(2)CAN控制器SJA1000与驱动器82C250接口及其他外围电路;(3)82C250外围电路。 电路如下: 1 SJA1000与CPU接口 我们在学习单片机原理的时候,我相信大家都学习过RAM,ROM,I/O口扩展。大家可以把SJA1000看作一个外部的RAM,扩展电路十分简单。SJA1000支持两种模式单片机的连接,我们选用的是8051系列的单片机,所以选择的是I ntel模式。 (1)SJA1000的数据线和地址线是共用的,STC89C52的数据线和地址线也是共用的,这就更加方便了,直接连接就OK了。 (2)既然数据线和地址线共用,必须区分某一时刻,AD线上传输的是地址还是数据,所以就需要连接地址锁存信号 ALE。 (3)随便使用一个单片机管脚作为SJA1000的片选信号,我们学习板使用的是P20。当然你也可以直接接地。
(4)读写信号直接和单片机连接就行了,就不必多说了! (5)我们采用单片机的IO口线控制SJA1000的RST管脚,是为了软件可以实现硬复位SJA1000芯片。 (6)SJA1000的中断管脚连接单片机的INT1外部中断。当收到一包数据后,通知CPU。 2 SJA1000与82C250的接口及其他外围电路 (1)SJA1000有两路发送和接收管脚,CAN总线学习板使用了第0路。与82 C250的连接比较简单,直接连接就可以了。但应该数据发送和接收管脚不要接反了。而且我们增加了通讯状态指示灯,便于调试。 (2)时钟电路:SJA1000的最高时钟可达24M,我们学习板使用的是16M的晶振。另外增加了一个启动电阻R9(10M欧姆)。 (3) 3 82C250外围电路 (1)CANH和CANL管脚增加阻容电路,滤除总线上的干扰,提高系统稳定性。(2)RS管脚为斜率电阻输入。通过这个管脚来选择82C250的工作模式:高速模式(应用与对数据传输速率高的情况,通讯数据线最好是屏蔽的);斜率模式(速度较低,通讯线可以是普通的双绞线)。准备模式(应用于对功耗要求比较高的场合)。我们的学习板采用的是斜率模式,方便大家学习。 (3)J3是外部总线的连接口。 (4)J4是终端电阻的选择端。 到现在为止,CAN总线学习的硬件部分就介绍完了,请等待下面的软件试验部分!
基于ARM7处理器的CAN总线网络设计
基于ARM7处理器的CAN总线网络设计 1 引言 can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。由于can 总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。 can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。 2 系统总体方案设计 整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。 网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。本设计can总线传输介质采用双绞线。 图 1 can总线网络系统结构 3 can总线智能网络节点硬件设计 本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。该智能节点的电路原理图如图2所示。该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。
汽车can总线设计
湖南机电职业技术学院 《汽车单片机应用技术》实训报告 题目汽车CAN总线系统智能节点的设计 院系汽车工程系 专业汽车电子1004 学生姓名向杰 指导教师冉成科 完成日期 2012年3月23日
目录 概述 (3) 实训要求 (4) 第一章汽车车载网络系统的组成和原理 (4) 1.1汽车网络技术概述 (4) 1.2 汽车网络技术的作用 (4) 第二章 CAN总线 (4) 2.1 CAN简介 (5) 2.2汽车CAN总线网络系统结构图 (6) 第三章CAN总线的维修与检修 (7) 3.1 故障类型及检测诊断方法 (7) 第四章 CAN总线在汽车领域的应用 (8) 4.1摘要 (8) 4.2 CAN总线技术的应用 (8) 4.3汽车CAN总线节点ECU的硬件设计 (8) 4.4CAN总线在国内自主品牌汽车中的应用 (9) 第五章实训心得 (10)
概述 随着现代汽车中所使用的电子表之间、系统和汽车故障诊断系统之间均需要进行数据交换,如使用普通的线索完成这些数据之间的交换,线索总长可能超过1600m,实现起来是相当困难的。为解决这一问题控制系统和通讯系统越来越多,如发动机电控系统、自动变速器控制系统、防抱死制动系统(ABS)、自动巡航系统(ACC)和车载多媒体系统等,这些系统之间、系统与显示仪,德国的博世(Bosch)公司及几个半导体生产商开发出一种新型的车用控制器——CAN。 CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO 国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。 现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持,所以它在汽车领域中运用只会越来越广泛越来越重要。我们作为汽车电子的学习者有必要学好这方面的技术,这样才能顺应汽车高智能化的特点。为自己提升技能。
车辆CAN总线概述(完整版)
一.CAN总线简介 1、CAN总线得发展历史 20世纪80年代初期,欧洲汽车工业得蓬勃发展,车辆电子信息化程度得也不断提高。当时,由于消费者对于汽车功能得要求越来越多,而这些功能得实现大多就是基于电子操作得,这就使得电子装置之间得通讯越来越复杂,同时意味着需要更多得连接信号线,但就是传统得线束式汽车电子系统已经不能满足车辆电子信息功能发展得需求。为了解决这一制约现代汽车电子信息化发展得瓶颈,德国Bosch公司设计了一个单一得网络总线,所有得外围器件可以被挂接在该总线上,经过试验,这一总线能够有效解决现代汽车中庞大得电子控制装置之间得通讯,并且能够减少不断增加得信号线。所以在1986年Bosch公司正式公布了这一总线,且命名为CAN总线。 CAN控制器局部网(CAN—Controller Area Network)属于现场总线得范畴,它就是一种有效支持分布式控制或实时控制得串行通讯网络,它具有很高得网络安全性、通信可靠性与实时性,简单实用,网络成本低,特别适用于汽车计算机控制系统与环境恶劣、电磁辐射强与振动大得工业环境,因此CAN总线在诸多现场总线中独占鳌头,成为汽车总线得代名词,CAN总线开始进入快速发展时期: 1987年Intel公司生产出了首枚CAN控制器(82526)。不久,Philips公司也推出了CAN 控制器82C200; 1991年,Bosch颁布CAN 2、0技术规范,CAN2、0包括A与B两个部分为促进CAN以及CAN协议得发展,1992在欧洲成立了国际用户与厂商协会(CAN in Automation,简称CiA),在德国Erlangen注册,CiA总部位于Erlangen。CiA 提供服务包括:发布CAN得各类技术规范, 免费下载CAN文献资料, 提供CANopen规范DeviceNet规范;发布CAN产品数据库,CANopen产品指南;提供CANopen验证工具执行CANopen认证测试;开发CAN规范并发布为CiA标准。 1993 年CAN 成为国际标准ISO11898(高速应用)与ISO11519(低速应用); 1993年,ISO颁布CAN国际标准ISO11898; 1994年,SAE颁布基于CA N得J1939标准; 2003年,Maybach发布带76个ECU得新车型(CAN,LIN,MOST); 2003年,VW发布带35个ECU得新型Golf。
CAN总线接口电路设计注意事项(精)
CAN总线接口电路设计注意事项收藏 CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域得到了广泛的应用。为提高系统的驱动能力,增大通信距离,实际应用中多采用Philips公司的82C250作为CAN控制器与物理总线间的接口,即CAN收发器,以增强对总线的差动发送能力和对CAN控制器的差动接收能力。为进一步增强抗干扰能力,往往在CAN 控制器与收发器之间设置光电隔离电路。典型的CAN总线接口电路原理如图1所示。 图1 典型的CAN总线接口电路原理图 1 接口电路设计中的关键问题 1.1 光电隔离电路 光电隔离电路虽然能增强系统的抗干扰能力,但也会增加CAN总线有效回路信号的传输延迟时间,导致通信速率或距离减少。 82C250等型号的CAN收发器本身具备瞬间抗干扰、降低射频干扰(RFI以及实现热防护的能力,其具有的电流限制电路还提供了对总线的进一步保护功能。因此,如果现场传输距离近、电磁干扰小,可以不采用光电隔离,以使系统达到最大的通信速率或距离,并且可以简化接口电路。如果现场环境需要光电隔离,应选用高速光电隔离器件,以减少CAN总线有效回路信号的传输延迟时间,如高速光电耦合器 6N137,传输延迟时间短,典型值仅为48 ns,已接近TTL电路传输延迟时间的水平。
1.2 电源隔离 光电隔离器件两侧所用电源Vdd与Vcc必须完全隔离,否则,光电隔离将失去应有的作用。电源的隔离可通过小功率DC/DC电源隔离模块实现,如外形尺寸为DIP-14标准脚位的5 V 双路隔离输出的小功率DC/DC模块。 1.3 上拉电阻 图1中的CAN收发器82C250的发送数据输入端TXD与光电耦合器6N137的输出端OUT相连,注意TXD必须同时接上拉电阻R3。一方面,R3保证6N137中的光敏三极管导通时输出低电平,截止时输出高电平;另一方面,这也是CAN 总线的要求。具体而言, 82C250的TXD端的状态决定着高、低电平CAN 电压输入/输出端CANH、CANL的状态(见表1。CAN总线规定,总线在空闲期间应呈隐性,即CAN 网络中节点的缺省状态是隐性,这要求82C25O的TXD端的缺省状态为逻辑1(高电平。为此,必须通过R3确保在不发送数据或出现异常情况时,TXD端的状态为逻辑1(高电平。 表1 TXD与CANH、CANL的关系表 TXD CANH电CANL电CAN总 状态平(V 平(V 线状态 1 2.5 2.5 隐性(逻辑1 0 3.5 1.5 显性(逻辑0 1.4 总线阻抗匹配 CAN总线的末端必须连接2个120Ω的电阻,它们对总线阻抗匹配有着重要的作用,不可省略。否则,将大大降低总线数据通信时的可靠性和抗干扰性,甚至有可能导致无法通信。
CAN总线基础知识介绍
什么是CAN ? CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU 之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。 一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。实际应用中,节点数目受网络硬件的电气特性所限制。例如,当使用Philips P82C250作为CAN收发器时,同一网络中允许挂接110个节点。CAN 可提供高达1Mbit/s的数据传输速率,这使实时控制变得非常容易。另外,硬件的错误检定特性也增强了CAN的抗电磁干扰能力。 CAN 是怎样发展起来的? CAN最初出现在80年代末的汽车工业中,由德国Bosch公司最先提出。当时,由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线。提出CAN总线的最初动机就是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线。于是,他们设计了一个单一的网络总线,所有的外围器件可以被挂接在该总线上。1993年,CAN 已成为国际标准ISO11898(高速应用)和ISO11519(低速应用)。 CAN是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10Km时,CAN 仍可提供高达50Kbit/s的数据传输速率。 由于CAN总线具有很高的实时性能,因此,CAN已经在汽车工业、航空工业、工业控制、安全防护等领域中得到了广泛应用。 CAN 是怎样工作的? CAN通讯协议主要描述设备之间的信息传递方式。CAN层的定义与开放系统互连模型(OSI)一致。每一层与另一设备上相同的那一层通讯。实际的通讯发生在每一设备上相邻的两层,而设备只通过模型物理层的物理介质互连。CAN的规范定义了模型的最下面两层:数据链路层和物理层。下表中展示了OSI开放式互连模型的各层。应用层协议可以由CAN 用户定义成适合特别工业领域的任何方案。已在工业控制和制造业领域得到广泛应用的标准是DeviceNet,这是为PLC和智能传感器设计的。在汽车工业,许多制造商都应用他们自己的标准。 表1 OSI开放系统互连模型 7 应用层最高层。用户、软件、网络终端等之间用来进行信息交换。如:DeviceNet 6 表示层将两个应用不同数据格式的系统信息转化为能共同理解的格式 5 会话层依靠低层的通信功能来进行数据的有效传递。 4 传输层两通讯节点之间数据传输控制。操作如:数据重发,数据错误修复 3 网络层规定了网络连接的建立、维持和拆除的协议。如:路由和寻址 2 数据链路层规定了在介质上传输的数据位的排列和组织。如:数据校验和帧结构 1 物理层规定通讯介质的物理特性。如:电气特性和信号交换的解释 CAN能够使用多种物理介质,例如双绞线、光纤等。最常用的就是双绞线。信号使用差分电压传送,两条信号线被称为“CAN_H”和“CAN_L”,静态时均是2.5V左右,此时状态表示为逻辑“1”,也可以叫做“隐性”。用CAN_H比CAN_L高表示逻辑“0”,称为“显形”,
CAN总线基础知识学习笔记
CAN总线基础知识学习笔记 依照瑞萨公司的《CAN入门书》的组织思路来学习CAN通信的相关知识,并结合网上相关资料以及学习过程中的领悟整理成笔记。好记性不如烂笔头,加油! 1 CAN的一些基本概念 1.1 什么是CAN总线 CAN 是Controller Area Network 的缩写,是ISO 国际标准化的串行通信协议。通俗来讲,CAN总线就是一种传输数据的线,用于在不同的ECU之间传输数据。 CAN总线有两个ISO国际标准:ISO11898 和ISO11519。其中: ISO11898 定义了通信速率为125 kbps~1 Mbps 的高速CAN 通信标准,属于闭环总线,传输速率可达1Mbps,总线长度≤40米。 ISO11519 定义了通信速率为10~125 kbps 的低速CAN 通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米。 Tips: :又称为总线的通信速率,指的是位速率。或称为比特率(和波特率不是一回事),表示的是:单位时间内,通信线路上传输的二进制位的数量,其基本单位是bps 或者b/s (bit per second)。 1.2 CAN的拓扑结构 下图中,左边是高速CAN总线的拓扑结构,右边是低速CAN总线的拓扑结构。 如图中所示,CAN总线包括CAN_H 和CAN_L 两根线。节点通过CAN控制器和CAN 收发器连接到CAN总线上。 TIps :通常来讲,ECU内部集成了CAN控制器和CAN收发器,但是也有没集成的,需要自己外加。 1.3 CAN信号表示 在CAN总线上,利用CAN_H和CAN_L两根线上的电位差来表示CAN信号。CAN总线上的电位差分为显性电平和隐性电平。其中显性电平为逻辑0,隐性电平为逻辑
can节点设计
课程设计 课程名称车载总线题目名称 学生学院 专业班级 学号 学生姓名 指导教师 20 年月日
摘要:通过iCAN协议,设计单片机对SJA1000连接,进行控制收发器TJA1050的收发,通过iCAN-4050数字I/O产品进行流水灯输出试验。 关键词:CAN总线、SJAl000、TJA1050、AT89C52 1 引言 CAN(Controller Area Network)是控制器局域网,主要用于各种设备检测及控制的现场总线。CAN总线是德国BOSCH公司20世纪80年代初为解决汽车中众多控制与测试仪器间的数据交换而开发的串行数据通信协议。这是一种多主总线,无论是在高速网络还是在低成本的节点系统,应用都很广泛。由于采用了许多新技术及独特的设计,与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性,其主要特点如下: ●通信方式灵活,可以多主方式工作,网络上任意一个节点均可以在任意时刻主动向网络上的其他节点发送信息,不分主从。 ●CAN节点只需对报文的标识符滤波即可实现点对点、点对多点及全局广播方式发送和接收数据,其节点可分成不同的优先级,节点的优先级可通过报文标识符进行设置,优先级高的数据最多可在134μs内传输,可以满足不同的实时要求。 ●CAN总线通信格式采用短帧格式,每帧字节数量多为8个字节,可满足一般工业领域中控制命令、工作状态及测试数据的要求,同时,8个字节不会占用总线时间过长,保证了通信的实时性。 ●采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息出现冲突时,优先级低的节点会主动退出数据发送,而优先级高的节点可不受影响地继续传输数据,大大节省了总线冲突仲裁时间,在网络重载的情况下也不会出现网络瘫痪。 ●直接通信距离最大可达10 km (速率在5 kb/s以下),最高通信速率可达1 Mb/s (此时距离最长为40 m);节点数可达110个,通信介质可以是双绞线、同轴电缆或光导纤维。 ●CAN总线采用CRC检验并可提供相应的错误处理功能,保证数据通信的可靠性,其节点在错误严重的情况下具有自动关闭输出功能,使总线上其他节点的操作不受影响。
CAN总线接口电路设计注意事项
CAN总线接口电路设计注意事项 CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域得到了广泛的应用。为提高系统的驱动能力,增大通信距离,实际应用中多采用Philips公司的82C250作为CAN控制器与物理总线间的接口,即CAN收发器,以增强对总线的差动发送能力和对CAN控制器的差动接收能力。为进一步增强抗干扰能力,往往在CAN 控制器与收发器之间设置光电隔离电路。典型的CAN总线接口电路原理如图1所示。 图1 典型的CAN总线接口电路原理图 1 接口电路设计中的关键问题 1.1 光电隔离电路 光电隔离电路虽然能增强系统的抗干扰能力,但也会增加CAN总线有效回路信号的传输延迟时间,导致通信速率或距离减少。82C250等型号的CAN收发器本身具备瞬间抗干扰、降低射频干扰(RFI)以及实现热防护的能力,其具有的电流限制电路还提供了对总线的进一步保护功能。因此,如果现场传输距离近、电磁干扰小,可以不采用光电隔离,以使系统达到最大的通信速率或距离,并且可以简化接口电路。如果现场环境需要光电隔离,应选用高速光电隔离器件,以减少CAN总线有效回路信号的传输延迟时间,如高速光电耦合器6N137,传输延迟时间短,典型值仅为48 ns,已接近TTL电路传输延迟时间的水平。 1.2 电源隔离 光电隔离器件两侧所用电源Vdd与Vcc必须完全隔离,否则,光电隔离将失去应有的作用。电源的隔离可通过小功率DC/DC电源隔离模块实现,如外形尺寸为DIP-14标准脚位的5 V 双路隔离输出的小功率DC/DC模块。 1.3 上拉电阻 图1中的CAN收发器82C250的发送数据输入端TXD与光电耦合器6N137的