Ni掺杂TiO2电子和几何结构的第一性原理研究

第16卷第2期2017年6月
材料与冶金学报
Journal of Materials and Metallurgy
Vol.16 No.2
June2017
doi:10. 14186/j. cnki. 1671 -6620. 2017. 02. 013
N i掺杂Ti02电子和几何结构的第一性原理研究
于智清1>2,王逊2,杨合\薛向欣1
(1.东北大学冶金学院,沈阳110819; 2.沈阳建筑大学理学院,沈阳110168)
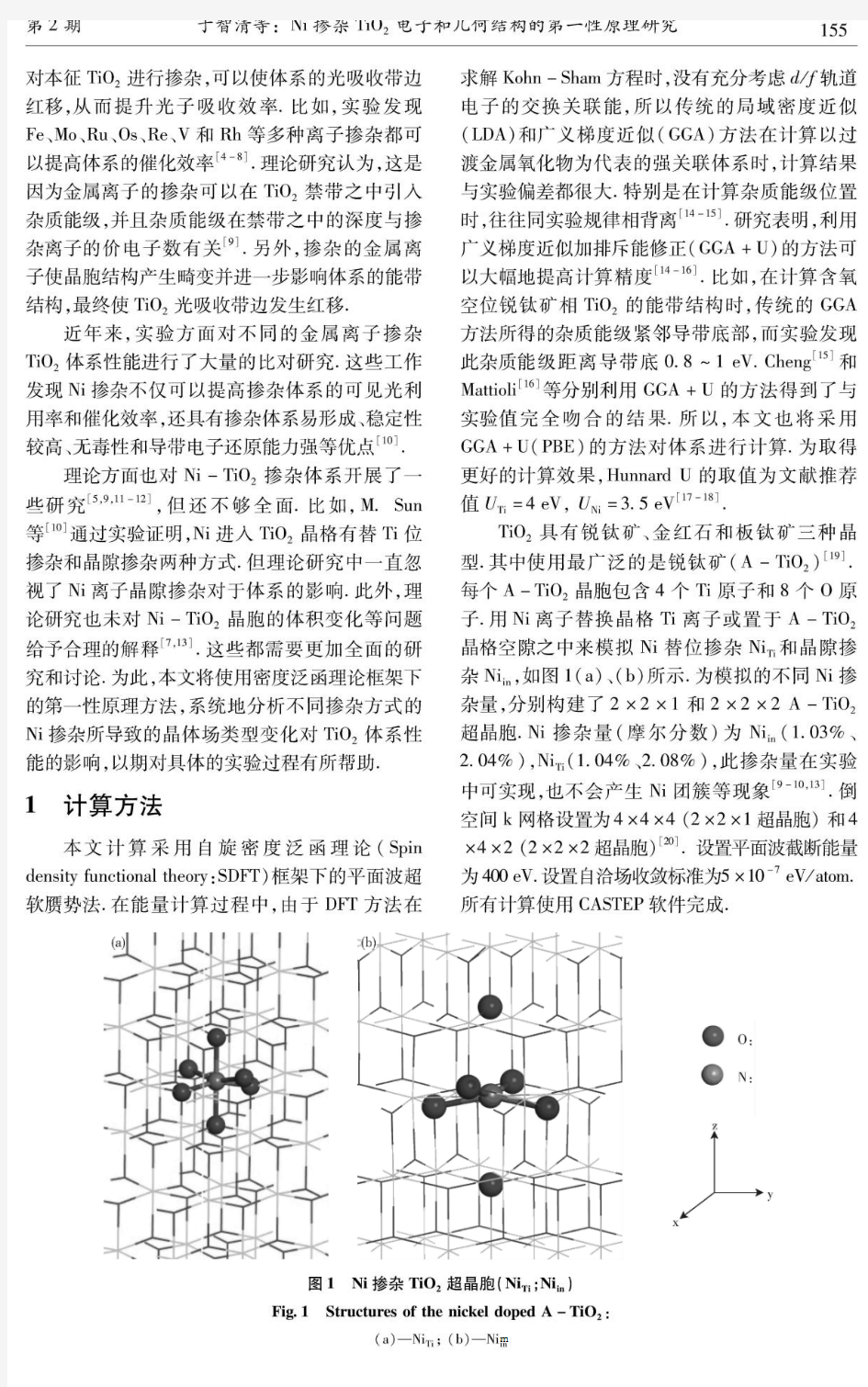
摘要:利用密度泛函理论框架下的第一性原理方法,对不同掺杂量、不同方式的m掺杂锐钛矿相TK)2 (anataseTK),:A-TK),)的晶胞结构、缺陷形成能和态密度图像等进行了研究,并着重讨论了掺杂m离子 周围配位场改变对体系电子结构的影响.结果表明,掺杂方式的不同对阳-1^02超晶胞的几何结构有较大 影响.正是几何结构的变化导致掺杂阳离子处于不同类型的晶体配位场之中,这是掺杂体系电子结构差异 的本质原因.通过对掺杂体系形成能的比较,发现M掺杂TK)2的具体方式取决于晶体生长过程中的氧环 境.通过对体系电子结构的研究,发现各种掺杂体系的禁带中都出现由M3d-02p轨道杂化形成的杂质能 级.M离子替代晶格1^掺杂会使吸收光谱红移,而阳的晶隙掺杂则使吸收光谱蓝移,且这种光谱吸收带边 的差异会随掺杂浓度的增加而增大.
关键词:W掺杂;掺杂方式;晶胞结构;态密度;第一性原理
中图分类号:0 775 文献标识码:A文章编号:1671-6620(2017)02-0154-05
First principle study on the electronic and geometical
structures of Ni - doped anatase Ti02
Yu Zhiqing1,2, Wang Xun2, Yang He1, Xue Xiangxin1
(1.Sc h o o l o f M e t a l l u r g y,Northeastern University, S h e n y a n g110819 ,C h i n a;
2. Sc h o o l o f S c i e n c e, S h e n y a n g Jianzhu University, S h e n y a n g110168 , C h i n a)
Abstract:With the first principle method of spin density functional theory, the crystal structure, formation energy of defect, and the density of states of anatase T i02( A - T i02) , doped with different nickel content and different ways, were studied. Here, effect of change of the ligand field around the doping nickle ions on the electronic structure of the system was discussed. The results showed that, the difference of the doping ways has a great influence on geometric structures of the doped supercell, which makes change of the crystal ligand field around doping Ni ions. That is the essential reason for the difference of the electronic structure of the doped system. Compared the formation energy of the system, it was found that the doping ways depends on the oxygen environment in the crystal growth process. Through research on the electronic structure of the system it was found that the impurity band level is formed by the hybridization of N i3J and 〇2p orbitals. Replacement of the titanium crystal lattic by the nickel one causes red shift for the absorption spectrum. While the doped nickel results in blue shift for the spectrum. And furthermore, the difference of the absorption borderline will increase with the doped concentration.
Key words:doped anatase;doping mode;cell structure;density of states;first principle
TK)2是一种优良的半导体材料,具有储存量 大、价格合理和稳定性高等优势,广泛地应用在有 机污染物处理、清洁能源制造、表面抗菌、金属防 腐等诸多领域[1].在以上各种应用过程中,都需 要Ti02材料能够有效地吸收光子以产生大量的 光生(e V h+)对,并使产生的光生载流子在其生命周期内顺利地迁移到晶体表面[2].但是,本征 Ti02的禁带宽度较大(3.0?3.2 e V),使其只能 吸收部分紫外光线的光子(波长A <380 m n),且 光生(e V h+)对的复合率较高,这些都严重地限 制了 1^02材料的实际应用[3].
实验和理论研究都表明,利用过渡金属元素
收稿日期:2016-06-25.
基金项目:国家自然科学基金资助项目(U1261120).
作者简介:于智清(1978—),男,东北大学博士研究生.
通讯作者:薛向欣(1954—),男,教授,博士生导师,E - mail: xuexx@ mail. neu. edu. cn.
M97可编程直流电子负载说明书
M97系列可编程直流电子负载 用户使用手册 适用型号M9710/M9711/M9712/M9712B/M9712C 版本号:V1.1 南京美尔诺电子有限公司版权所有
目录 第一章 简介 (1) 第二章 技术规格 (2) 2.1主要技术规格 (2) 2.2电子负载尺寸图 (4) 第三章 快速入门 (5) 3.1开机自检 (5) 3.2如果负载不能启动 (5) 3.3前面板和后面板介绍 (6) 3.4键盘说明 (6) 3.5菜单操作 (7) 第四章 面板操作 (10) 4.1基本操作模式 (10) 4.1.1定电流操作模式(CC) (10) 4.1.1.1标准定电流模式 (10) 4.1.1.2加载卸载定电流模式 (10) 4.1.1.3软启动定电流模式 (11) 4.1.1.4定电流转定电压模式 (12) 4.1.2定电阻操作模式(CR) (12) 4.1.2.1 标准定电阻模式 (12) 4.1.2.2 加载卸载定电阻模式 (13) 4.1.2.3定电阻转定电压模式 (13) 4.1.3定电压操作模式(CV) (13) 4.1.3.1标准定电压模式 (14) 4.1.3.2加载卸载定电压模式 (14) 4.1.3.3软启动定电压模式 (14) 4.1.4定功率操作模式(CW) (15) 4.1.4.1标准定功率模式 (15) 4.1.4.2加载卸载定功率模式 (15) 4.2动态测试操作 (15) 4.2.1连续模式(CONTINUOUS ) (16) 4.2.2脉冲模式(PULSE) (16) 4.2.3触发模式(TRIGGER) (16) 4.2.4 动态测试参数设置 (16) 4.2.5波形控制 (17) 4.2.5.1方波 (17) 4.2.5.2三角波 (17) 4.2.5.3梯形波 (17) 4.2.6 触发控制 (17) 4.2.7 LIST功能 (17) 4.2.7.1.编辑LIST列表 (17) 4.2.7.2执行LIST功能 (18)
企业成本控制外文翻译文献
企业成本控制外文翻译文献(文档含英文原文和中文翻译)
译文: 在价值链的成本控制下减少费用和获得更多的利润 摘要: 根据基于价值链的成本管理理念和基于价值的重要因素是必要的。首先,必须有足够的资源,必须创造了有利的价值投资,同时还需要基于客户价值活动链,以确定他们的成本管理优势的价值链。其次,消耗的资源必须尽量减少,使最小的运营成本价值链和确保成本优势是基于最大商业价值或利润,这是一种成本控制系统内部整个视图的创建和供应的具实践,它也是一种成本控制制度基于价值链,包括足够的控制和必要的资源投资价值的观点,创建和保持消费的资源到合理的水平,具有价值的观点主要对象的第一个因素是构造有利的价值链,从创造顾客价值开始;第二个因素是加强有利的价值链,从供应或生产客户价值开始。因此它是一个新型的理念,去探索成本控制从整个视图的创建和供应的商品更盈利企业获得可持续的竞争优势。 关键词:成本控制,价值链,收益,支出,收入,成本会计 1、介绍 根据价值链理论,企业的目的是创造最大的顾客价值;和企业的竞争优势在于尽可能提供尽可能多的价值给他们的客户,作为低成本可能的。这要求企业必须首先考虑他们是否能为顾客创造价值,和然后考虑在很长一段时间内如何创造它。然而,竞争一直以“商品”(或“产品”)作为最直接的载体,因此,传统的成本控制方法主要集中在对“产品”和生产流程的过程。很显然,这不能解决企业的问题,企业是否或如何能为客户创造价值。换句话说,这至少不能从根本上解决它。 因此,企业必须首先投入足够的资源,以便他们能够创建客户值取向,然后提供它以最少的资源费用。所以在整个视图中对价值创造和提供整体的观点来控制成本,它可以为客户提供完美的动力和操作运行机制运行成本的控制,也可以从根本上彻底克服了传统的成本控制方法的缺点,解决了无法控制的创造和供应不足的真正价值。基于此,本文试图从创作的整体观讨论成本控制提供价值并探讨实现良性循环的策略,也就是说,“创造价值投资成本供应价值创造价值”。 2、成本及其控制的基于价值链理念 2.1基于价值链的成本观念 根据价值链理论,如果企业是要被客户接受,它必须创造和提供能满足其客户的价值。因此,成本(价值或资源支付费用)这不离为创造和提供顾客价值的活动,其活动的价值链。因此,我们应该从价值链角度看成本的重要。
第一性原理计算原理和方法
第二章 计算方法及其基本原理介绍 化学反应的本质就是旧键的断裂与新建的形成,参与成键原子的电子壳层重新组合就是导致生成稳定多原子化学键的明显特征。因此阐述化学键的理论应当描写电子壳层的相互作用与重排,借助求解满足适当的Schrodinger 方程的波函数描写分子中电子分布的量子力学,为解决这一问题提供了一般的方法,然而,对于一些实际的体系,不引入一些近似,就不可能求解其Schrodinger 方程。这些近似使一般量子力学方程简化为现代电子计算机可以求解的方程。这些近似与关于分子波函数的方程形成计算量子化学的数学基础。 2、1 SCF-MO 方法的基本原理 分子轨道的自洽场计算方法 (SCF-MO)就是各种计算方法的理论基础与核心部分,因此在介绍本文计算工作所用方法之前,有必要对其关键的部分作一简要阐述。 2、1、1 Schrodinger 方程及一些基本近似 为了后面介绍各种具体在自洽场分子轨道(SCF MO)方法方便,这里将主要阐明用于本文量子化学计算的一些重要的基本近似,给出SCF MO 方法的一些基本方程,并对这些方程作简略说明,因为在大量的文献与教材中对这些方程已有系统的推导与阐述[1-5]。 确定任何一个分子的可能稳定状态的电子结构与性质,在非相对论近似下,须求解 R AB =R 图2-1分子体系的坐标
定态Schrodinger 方程 ''12121212122ψψT p B A q p A p pA A pq AB B A p A A A E R Z r R Z Z M =??????? ?-++?-?-∑∑∑∑∑∑≠≠ (2、1) 其中分子波函数依赖于电子与原子核的坐标,Hamilton 算符包含了电子p 的动能与电子p 与q 的静电排斥算符, ∑∑≠+?-=p q p pq p e r H 12121?2 (2、2) 以及原子核的动能 ∑?-=A A A N M H 2121? (2、3) 与电子与核的相互作用及核排斥能 ∑∑≠+-=p A B A AB B A pA A eN R Z Z r Z H ,21? (2、4) 式中Z A 与M A 就是原子核A 的电荷与质量,r pq =|r p -r q |,r pA =|r p -R A |与R AB =|R A -R B |分别就是电子p 与q 、核A 与电子p 及核A 与B 间的距离(均以原子单位表示之)。上述分子坐标系如图2、1所示。可以用V(R,r)代表(2、2)-(2、4)式中所有位能项之与 ∑∑∑-+=≠≠p A pA A B A q p pq AB B A r Z r R Z Z r R V ,1 2121),( (2、5) 原子单位 上述的Schrodinger 方程与Hamilton 算符就是以原子单位表示的,这样表示的优点在于简化书写型式与避免不必要的常数重复计算。在原子单位的表示中,长度的原子单位就是Bohr 半径
便携式电池组充放电仪工作原理以及如何选择
充放电测试仪,是动力锂电池最常用的测试设备。新电池需要做配组,进行一致性筛选;电池包设计定型过程中,多个环节的测试需要进行充放电;考察电池包性能,进行工况测试需要充放电测试仪的辅助;旧电池,充放电测试健康状况;一些认证、抽查和应甲方要求进行的测试,都需要进行充放电。 1 锂电池主要参数 充放电测试设备,需要能够在充放电过程中,实时监测电池单体、模块和电池包的相关参数,这些参数包括如下内容。 容量,电池从满电状态放电至放电截止条件,总共放出来的电量,单位Ah。容量受到放电电流、环境温度等的影响比较大,因此,提起容量,必得说什么温度和什么放电电流下的容量。 荷电状态(SOC),电池当前电量与总体可用容量的比值,用百分数表示。 放电深度(DOD),电池从满电开始截止到当前,已经放出的电量与总体可用容量的比值,也用百分号表示,与SOC的关系是DOD=1-SOC; 开路电压(VOC),断开外部电路测量得到的电池两极间电压,数值上等于电池的电动势; 工作电压,接通外部回路以后,测量电池两极之间的电压,数值上等于电池电势减去电池内阻占压(以放电过程为例); 充电截止电压,电池管理系统设置的充电过程能够达到的最高电压,到达这
个电压以后,电池管理系统要求充电过程结束。充电截止电压一般略低于电池允许的最高开路电压; 放电截止电压,放电过程允许的电池的最低电压,当放电过程触及这个数值超过一定延时时间,电池管理系统要求断开放电回路。 内阻,电池自身电化学反应的固有特性,以回路阻抗的形式表现在充放电过程中。主要由两部分构成,欧姆内阻和极化内阻。在充放电曲线上,电流加载瞬间,电池端电压的瞬间跌落是欧姆内阻带来的影响;充电截止,电流消失到端电压平稳一段时间内电压的回升则是极化电阻的影响力的体现。 2 一般充放电测试仪的功能有哪些? 1)具有恒流恒压充放电功能,可以实现自动寿命循环,自动进行标准工况或者人为设定工况的测试;循环测试,可是实现循环的嵌套; 2)具有记录实时电流、电压、温度、荷电量等相关测试数据和故障数据的功能; 3)可以设置不同充放电终止条件,总电压、单体电压、电池荷电状态等; 4)安全监控功能,处理对过流、过压、过温、欠压、欠流、短路、掉电保
智能汽车中英文对照外文翻译文献
智能汽车中英文对照外文翻译文献 (文档含英文原文和中文翻译) 翻译: 基于智能汽车的智能控制研究 摘要:本文使用一个叫做“智能汽车”的平台进行智能控制研究,该小车采用飞思卡尔半导体公司制造的MC9S12DG128芯片作为主要的控制单元,同时介绍了最小的智能控制系统的设计和实现智能车的自我追踪驾驶使用路径识别算法。智能控制智能车的研究包括:提取路径信息,自我跟踪算法实现和方向和速度控制。下文介绍了系统中不同模块的各自实现功能,最重要部分是智能车的过程智能控制:开环控制和闭环控制的应用程序包括增量式PID控制算法和鲁棒控制算法。最后一步是
基于智能控制系统的智能测试。 关键词:MC9S12DG128;智能控制;开环控制;PID;鲁棒; 1.背景介绍 随着控制理论的提高以及信息技术的快速发展,智能控制在我们的社会中发挥着越来越重要的作用。由于嵌入式设备有小尺寸、低功耗、功能强大等优点,相信在这个领域将会有一个相对广泛的应用,如汽车电子、航空航天、智能家居。如果这些技术一起工作,它将会蔓延到其他领域。为了研究嵌入式智能控制技术,“智能汽车”被选为研究平台,并把MC9S12DG128芯片作为主控单元。通过智能控制,智能汽车可以自主移动,同时跟踪的路径。 首先,本文给读者一个总体介绍智能车辆系统的[2、3]。然后,根据智能车辆的智能控制:提取路径信息,自我跟踪算法实现中,舵机的方向和速度的控制。它提供包括了上述四个方面的细节的智能车系统信息。此外,本文强调了智能车的控制过程应用程序包括开环控制、闭环增量PID算法和鲁棒算法。 2.智能车系统的总体设计 该系统采用MC9S12DG128[4]作为主芯片,以及一个CCD传感器作为交通信息收集的传感器。速度传感器是基于无线电型光电管的原理开发。路径可以CCD传感器后绘制收集的数据,并且系统计算出相应的处理。在同时,用由电动马达速度测试模块测量的智能汽车的当前速度进行响应的系统。最后,路径识别系统利用所述路径信息和当前的速度,以使智能汽车在不同的道路条件的最高速度运行。图1示出了智能车辆系统的框图。
第一性原理简介
第一性原理是什么 第一性原理怎么用 1什么是第一性原理 根据原子核和电子互相作用的原理及其基本运动规律,运用,从具体要求出发,经过一些近似处理后直接求解的算法,称为第一性原理。广义 的第一原理包括两大类,以Hartree-Fock自洽场计算为基础的从头算和 (DFT计算。 从定义可以看出第一性原理涉及到量子力学、、Hartree-Fock自洽场、等许多对我来说很陌生的物理化学定义。因此我通过向师兄请教和上网查资料一点点的了解并学习这些知识。 2第一性原理的作用 以密度泛函理论(DFT)为基础以及在此基础上发展起来的简单而具有一定精度的局域密度近似(LDA)和广义梯度近似(GGA)的第一性原理电子结构计算方法,与传统的解析方法一样,不但能够给出描述体系微观电子特性的物理量如波函数、态密度、费米面、电子间互作用势等,以及在此基础上所得到的体现体系宏观物理特性的参量如结合能、电离能、比热、电导、光电子谱、穆斯堡尔谱等等,而且它还可以帮助人们预言许多新的
物理现象和物理规律。密度泛函计算的一些结果能够与实验直接进行比较一些应用程序的发展乃至商业软件的发布,导致了基于密度泛函理论的第 一原理计算方法的广泛应用。 密度泛函理论(DFT)为第一性原理中的一类,在物理系、化学、材料科学以及其他工程领域中,密度泛函理论(DFT及其计算已经快速发展成 为材料建模模拟的一种“标准工具”。 密度泛函理论可以计算预测固体的晶体结构、晶格参数、能带结构、态密度(DOS、光学性能、磁性能以及原子集合的总能等等。 3第一性原理怎么用 目前我所学到的利用第一性原理的软件为Material Studio 、VASP软件。其中Materials Studio (简称MS是专门为材料科学领域研究者幵发的一款可运行在PC上的模拟软件。使化学及材料科学的研究者们能更方便地建立三维结构模型,并对各种晶体、无定型以及高分子材料的性质及相关过程进行深入的研究。模拟的内容包括了催化剂、聚合物、固体及表面、晶体与衍射、化学反应等材料和化学研究领域的主要课题。 模块简介 Materials Studio 采用了大家非常熟悉的Microsoft标准用户界面, 允许用户通过各种控制面板直接对计算参数和计算结果进行设置和分析。 目前,Materials Studio 软件包括如下功能模块: Materials Visualizer: 提供了搭建分子、晶体及高分子材料结构模型所需要的所有工具,可以操作、观察及分析结构模型,处理图表、表格或文本等形式的数据,并提供软件的基本环境和分析工具以及支持Materials Studio 的其他产品。是Materials Studio 产品系列的核心模块。 Discover: Materials Studio 的分子力学计算引擎。使用多种分子力学和动力学 方法,以仔细推导的力场作为基础,可准确地计算出最低能量构型、分子体系的结构和动力学轨迹等。
电子负载原理
直流电子负载设计基础 电子负载基本工作原理: 1.恒压模式 2.恒流模式 3.恒阻模式 4.恒功率模式 恒流 图中R1为限流电阻,R1上的电压被限制约0.7V,所以改变R1的阻值就可以改变恒流值,在上图中 我们知道,在串联电路中,各点电流相同,电路要恒流工作,只要在串联回路里控制流过一个元 件的电流就可以达到我们所控制的恒流输出。 上图是一个简易的恒流电路,通常用在一些功率较小及要求不高的场合里应用,那么在一些应用 中这种电路就无能为力了,如:在输入电压为1V输入电流为30A,那么对于这样的要求这样的电 根本无法保证工作。这样的电路调节输出电流也不是很方便。
这个图是一个最常用的恒流电路,这样的电路更容易获得稳定及精确的电流值,R3为取样电阻,VREF是给定信 号,电路工作原理是:当给定一个信号时VREF,如果R3上的电压小于VREF,也就是OP07的-IN小于+IN,OP07加输出大,使MOS加大导通使R3的电流加大。如果R3上的电压大于VREF时,-IN大于+IN,OP07减小输出,也就降了R3上的电流,这样电路最终维持在恒定的给值上,也就实现了恒流工作。 如给定VREF为10mV,R3为0.01欧时电路恒流为1A,改变VREF可改变恒流值,VREF可用电位器调节输入或用DAC 芯片由MCU控制输入,采用电位器可手动调节输出电流。如采用DAC输入可实现数控恒流电子负载。 电路仿真验证
在上图中我们给定了Vin为4V-12V变化的电压信号,VREF给定50mV 的电压信号,在仿真结果中输入电流一真保持在5A,电路实现了恒流 作用。 恒压电路 一个简易的恒压电路,用一个稳压二极管就可以了。 这是一个很简易的图,输入电压被限制在10V,恒压电路在用于测试充 电器时是很有用的, 我们可以慢慢调节电压测试充电器的各种反应。图是10V是不可调的,请看下图可调直流 恒压电子负载电路:
毕业设计外文翻译
本科生毕业设计(论文)外文翻译毕业设计(论文)题目:悬架系统设计与分析 外文题目:An Overview of Disarray in Active Suspension System 译文题目:主动悬架系统杂谈 学生姓名: XXX 专业:车辆工程1002班 指导教师姓名:田国富 评阅日期:
主动悬架系统杂谈 帕蒂尔,维杰河帕蒂尔,加尼甚 助理教授,机械工程系,A.D.C.E.T,阿什达 摘要:当设计一个悬挂系统时,它的双重目标是尽量减少传到乘客的垂直力量和最大限度地提高轮胎与道路接触以提高操控性和安全性。乘客的舒适性与从车身传递的垂直力有关。这个目标可以通过最小化车身的垂直加速度来实现。过度的车轮行驶,将导致轮胎相对路面的非最佳姿态,从而导致差的操控性和附着力。此外,为了保持良好的操控性,轮胎与路面的最佳接触必须保持在四个轮子上。在传统的悬架系统中,这些特点是冲突的,不符合所有条件。因此,在被动悬架系统的基础上,为了改善主动悬架系统,各种各样的研究工作正在进行中。在本文中各种作品的概述已经完成。考虑到季度汽车模型,本文试图给出关于以往的研究和他们的发现对被动和主动悬架系统的参数。 关键词:主动悬架系统,控制系统,动态,被动悬架,车辆。 1.引言 汽车悬架系统的目的是在不同路况下,能保持良好的操控特性和改善乘坐品质。不同的悬架,满足上述要求的程度不同。虽然,可由设计者的聪明才智来改善,就平均而言,悬架的性能主要取决于悬架使用的类型。按改进的性能可以以升序区分为:与被动,半主动和全主动悬架系统,输入的力通常由液压致动器提供。为主动悬架系统设计的机电致动器的另一种方法将在电子控制和悬架系统之间提供直接接口。 目前,公认的主动悬架有两种形式,一种是制动器和钢板弹簧平行的高带宽主动悬架。第二种是低带宽主动悬架,它的致动器带有一系列的钢板弹簧并且能够控制车身的运动,而簧下质量控制是通过被动阻尼器控制的。汽车悬架的主动控制在传统悬架的基础上又提出了新的改进。主动悬架,包括创建悬挂系统中力的液压致动器。由液压致动器产生的力被用来控制簧上质量的运动,以及簧上和簧下质量之间的相对速度。为了提高车辆的特色,以后将主要对主动悬架的高带宽型进行研究。
Background of Control Theory(控制理论基础) 外文翻译
Background of Control Theory System and Control Theory According to the Encyclopedia Americana,a system is "an aggregation ox assemblage of things so combined by nature or man as to form an integral and complex whale". Mathematical systems theory is the study,of the interruptions and behavior of such an assemblage of "things'* when subjected to certain conditions or inputs. The abstract nature of systems theory is due to the fact that it is concerned with mathematical properties rather than the physical faun of the constituent parts. Control theory is mare often concerned with physical applications. A control system is considered to he any system which exists for the purpose or regulating or controlling the flow of energy,information, money,or other quantities in some desired fashion. In more general terms,a control system is an interconnection of many components or functional units in such a way as to produce a desired result. In this book,control theory is assumed to encompass all questions related to design and analysis of control systems. Fig. 37. 1 is a general representation of an open loop control system, the ingot or control u(t) is selected hayed on the goals for the system and all available a priori knowledge about the system, The input is in no way influenced by the output of the system,represented by y(t),If unexpected disturbances act upon an open-loop system, or if its behavior is not completely understood,them the output will not behave precisely as expected.
调速控制外文翻译
应用于现场总线系统的卡尔曼滤波 -有延迟信号的速率控制系统 R. Pizá, J. Salt, A. Cuenca, V. Casanova 巴伦西亚技术大学,西班牙 {rpiza,julian,acuenca,vcasanov}@isa.upv.es 摘要:网络控制系统设备(控制器,传感器和执行器)共享一个共同的通信介质。由于通信介质会受到外部的干扰,所以这些设备通过共享的通信介质时会被随意地延迟传输。带宽传输能力也是有限的,这也可以随意地限制我们从控制回路中获得采样周期。 我们可以依据高速质的采样周期来减少信号的延迟并减少一些带宽。通常这个解决方案能显著的影响系统的性能。这是因为采样周期的高速质,闭环反应能力将会下降。本文提出了一个建议,来解决这些类型的问题。用卡尔曼滤波器,采用多速率过滤器来减少传输的要求。这最终的目标是建立一个系统,并使它尽可能的接近于一个单一的速率系统,从而得到一个起始点和系统参考。 在这项工作中,我们的多速率建模方法认为,要在有Profibus-DP和起重机三维平台的硬件环境下才能实现实验结果的成功。我们在检测控制技术方面有些实验。其中一些实验表明,在直接控制起重机的情况下,没有Profibus-DP总线控制,网络将无法避免一些信号的延迟和丢失。其它的一些实验表面在整个硬件平台中,使用起重机并有现场总线时,网络可以避免信号的延迟和丢失。 一、导言 控制系统采用共享通信介质是由于以下的几个原因。其中一个原因是,需要在硬件平台减少电缆。另外一个原因是,同样的信息设备,要能增加多输入多输出系统或更多可能性的配置,并让配置更加容易,还能够创造更复杂的系统。 几种控制应用中需要共享的通信介质有[ 6]:遥控操作,监控和控制系统。这就是通过共享的网络而诞生的网络控制系统(新的系统)。一般来说,该网络包括大量线路的减少,因此,体现了较高的维护灵活性和较低的应用成本[ 15]。由于布线限制了大小(如航空,生产汽车)或空间分布的限制(如化工厂),让成本更低和运行更加优化简单,用上述的解决办法是可取的[ 4],[ 5]。
如何分析能带图及第一性原理的计算
分析能带图 能带结构是目前采用第一性原理(从头abinitio)计算所得到的常用信息,可用来结合解释金属、半导体和绝缘体的区别。能带可分为价带、禁带和导带三部分,倒带和价带之间的空隙称为能隙,基本概念如图所示: 如何能隙很小或为0 ,则固体为金属材料,在室温下电子很容易获得能量而跳跃至传倒带而导电;而绝缘材料则因为能隙很大(通常大于9电子伏特),电子很难跳跃至传导带,所以无法导电。一般半导体材料的能隙约为1至3电子伏特,介于导体和绝缘体之间。因此只要给予适当条件的能量激发,或是改变其能隙之间距,此材料距能导电。 能带用来定性地阐明了晶体中电子运动的普遍特点。价带(valence band),或称价电带,通常指绝对零度时,固体材料里电子的最高能量。在导带(conduction band)中,电子的能量范围高于价带,而所有在传导带中的电子均可经由外在的电
场加速而形成电流。对与半导体以及绝缘体而言,价带的上方有一个能隙(band gap),能隙上方的能带则是传导带,电子进入传导带后才能在固体材料内自由移动,形成电流。对金属而言,则没有能隙介于价带与传导带之间,因此价带是特指半导体与绝缘体的状况。 费米能级(fermi level)是绝对零度下的最高能级。根据泡利不相容原理,一个量 子态不能容纳两个或两个以上的费米子(电子),所以在绝度零度下,电子将从低到高依次填充各能级,除最高能级外均被填满,形成电子态的“费米海”。“费米海” 中每个电子的平均能量为(绝对零度下)为费米能级的3/5。海平面即是费米能级。一般来说,费米能级对应态密度为0的地方,但对于绝缘体而言,费米能级就位于价带顶。成为优良电子导体的先决条件是费米能级与一个或更多的能带相交。 能量色散(dispersion of energy)。同一个能带内之所以会有不同能量的量子态, 原因是能带的电子具有不同波向量(wave vector),或是k-向量。在量子力学中, k-向量即为粒子的动量,不同的材料会有不同的能量-动量关系(E-K relationship)。能量色散决定了半导体材料的能隙是直接能隙还是间接能隙。如导带最低点与价带最高点的K值相同,则为直接能隙,否则为间接能隙。 能带的宽度。能带的宽度或三度,即能带最高和最低能级之间的能量差,是一个非常重要的特征,它是由相互作用的轨道之间的重叠来决定的,因而反应出轨道之间的重叠情况,相邻的轨道之间重叠越大,带宽就越大。
直流电子负载报告()
摘要 本系统主要以89S52单片机为控制核心。恒流方式时不论输入电压如何变化(在一定范围内),流过该电子负载的电流恒定,且电流值可设定。工作于恒压方式时,电子负载端电压保持恒定,且可设定,流入电子负载的电流随被测直流电源的电压变化而变化。工作于恒压模式时,电流随电压变化,并且其比值为一固定不变的常数,且可设定.ADC0832采集数据,在数码管上显示数据,并可手动切换恒流恒压横阻工作模式。 。 一、系统方案 1、方案比较与选择 (1)恒压模式设计 方案一:使用开关稳压电源方式。这种方式效率较高,应用也比较普遍。但在实际测试的过程中,发现纹波较大,不易控制。故不采用此方案。 方案二:采用晶闸管,通过控制电路改变晶闸管导通角以实现恒压工作方式,性能稳定。但价格较高,不宜使用。 方案三:采用LM324组成比较器,三极管上的电压经过R1与R2的分压送入运放正向输入端与给定值比较。 (2)恒流模式设计 方案一:采用电流互感器对电流回路上器件的磁场进行反馈,构成恒流模块。然而该电路的实现形式比较复杂,考虑到竞赛的时间限制,不采用此方案。 方案二:采用恒流二极管构成恒流模块,简单易行。但恒流二极管的恒流特性并不是非常好且电流规格比较少,价格又比较昂贵。故此方案也不可行。 方案三:选用运放LM358,将反相端输入端与输出端采用负反馈电路,在反馈电路中加入可调电阻,使得取样电阻上的电流可以微调,实现输出电流与理论值相同,大大提高了输出电流的精度,又由于运放的同相输入端的信号来自与数模转换模块的运放输出,稳定度很高。所以采用方案三。原理图如图所示,图中输出端取样电阻为0.5欧大功率电阻; (3)恒阻模式设计 方案一:可以在恒流电路的基础上通过MCU检测到的输入电压来计算电流,达到恒阻的目的。但这种方法响应较慢,只适用于输入变化较慢,且要求不高的时候,所以不予采用。 方案二:搭建硬件电路实现。通过可调电阻分压,并使用运放构成反馈,经过三极管调整电路达到恒阻效果。选用方案二。 (4)负载参数调节设计 方案一:人工预置。使用电位器设置负载参数。电位器调节较为麻烦,且数值不宜掌控,偏差较大。不予选用。 方案二:数字程控设置。运用单片机采集I/U数据,简洁清晰,精度较高。故选用方案二。 2、总体方案描述 (1)系统工作流程框图
有用电子负载原理
有用电子负载原理 RUSER redacted on the night of December 17,2020
电子负载原理 直流电子负载是控制功率MOSFET的导通深度,靠功率管的耗散功率(发热)消耗电能的设备,它的基本工作方式有恒压、恒流、恒阻、恒功率这几种。 下文讲述直流电子负载恒流模式原理。 在恒流模式下,不管输入电压是否改变,电子负载消耗一个恒定的电流。 一、功率MOS管的工作状态 电子负载是利用 MOS 的线性区,当作可变电阻来用的,把电消耗掉。 MOS管在恒流区(放大状态)内,Vgs一定时Id不随Vds的变化而变化,可实现MOS 管输出回路电流恒定。只要改变Vgs的值,即可在改变输出回路中恒定的电流的大小。 二、用运放控制Vgs 采样电阻Rs、运放构成一比较放大电路,MOS管输出回路的电流经RS转换成电压后,反馈到运放反向端实现控制vgs,从而MOS管输出回路的电流。 当给定一个电压VREF时,如果Rs上的电压小于 VREF,也就是运放的-IN小于+IN,运放加大输出,使MOS导通程度加深,使MOS管输出回路电流加大。如果 Rs 上的电压大于 VREF时,-IN大于+IN,运放减小输出,也就MOS管输出回路电流,这样电路最终维持在恒定的给值上,也就实现了恒流工作。 下面推导Id的表达式: Un=Is*Rs Up=Un=Uref Uref=Is*Rs Is=Id-Ig 对于MOS管,其输入电阻很大,Ig近似为0,则: Id=Is=Uref/Rs 由此可知只要Uref不变,Id也不变,即可实现恒流输出。
如果改变 UREF就可改变恒流值,UREF可用电位器调节输入或用DAC芯片由MCU控制输入,采用电位器可手动调节输出电流。若采用 DAC输入即可实现数控恒流电子负载。 三、实用的运放恒流电子负载 基本原理:MOS和电阻Rs组成负反馈电路,MOS管工作在恒流区,运放同相端调节设定恒流值,MOS管的电流在电阻Rs上产生压降,反馈到运放反向端实现控制输出电流。 R1、U2构成一基准电压源,R2、Rp对这电压分压得到一参考电压送入运放同相端,MOS管输出回路的电流Is经Rs转换成电压后,反馈到运放反向端实现控制vgs,从而控制MOS管输出回路的电流Is的稳定。电容C1主要作用有2个,一方面是消杂 波,另一方面也是对运放输出的梯波进行补偿,使得电压变化速度减缓,尽量减少mosfet的G极电压高频变化引发振荡的可能。 下面给出各种参数的表达式: Uref=*(Rp’/(R2+Rp)) 其中Rp’为Rp抽头对地的电阻 Is=Uref/RS=*(Rp’/(R2+Rp))/Rs 当Rp抽头在最上端时,Uref、Is有最大值 Urefmax=*(Rp/(R2+Rp)) Ismax=Urefmax/RS=*(Rp/(R2+Rp))/Rs 如果已知最大电流Is可用 Rs=Urefmax/RS=*(Rp/(R2+Rp))/Ismax 按图中元件参数计算,可以得到 Urefmax=*((27+)= Ismax=Urefmax/RS=*( Rp/(R2+Rp))/Rs = *( (27+)/=
机械设计外文翻译(中英文)
机械设计理论 机械设计是一门通过设计新产品或者改进老产品来满足人类需求的应用技术科学。它涉及工程技术的各个领域,主要研究产品的尺寸、形状和详细结构的基本构思,还要研究产品在制造、销售和使用等方面的问题。 进行各种机械设计工作的人员通常被称为设计人员或者机械设计工程师。机械设计是一项创造性的工作。设计工程师不仅在工作上要有创造性,还必须在机械制图、运动学、工程材料、材料力学和机械制造工艺学等方面具有深厚的基础知识。如前所诉,机械设计的目的是生产能够满足人类需求的产品。发明、发现和科技知识本身并不一定能给人类带来好处,只有当它们被应用在产品上才能产生效益。因而,应该认识到在一个特定的产品进行设计之前,必须先确定人们是否需要这种产品。 应当把机械设计看成是机械设计人员运用创造性的才能进行产品设计、系统分析和制定产品的制造工艺学的一个良机。掌握工程基础知识要比熟记一些数据和公式更为重要。仅仅使用数据和公式是不足以在一个好的设计中做出所需的全部决定的。另一方面,应该认真精确的进行所有运算。例如,即使将一个小数点的位置放错,也会使正确的设计变成错误的。 一个好的设计人员应该勇于提出新的想法,而且愿意承担一定的风险,当新的方法不适用时,就使用原来的方法。因此,设计人员必须要有耐心,因为所花费的时间和努力并不能保证带来成功。一个全新的设计,要求屏弃许多陈旧的,为人们所熟知的方法。由于许多人墨守成规,这样做并不是一件容易的事。一位机械设计师应该不断地探索改进现有的产品的方法,在此过程中应该认真选择原有的、经过验证的设计原理,将其与未经过验证的新观念结合起来。 新设计本身会有许多缺陷和未能预料的问题发生,只有当这些缺陷和问题被解决之后,才能体现出新产品的优越性。因此,一个性能优越的产品诞生的同时,也伴随着较高的风险。应该强调的是,如果设计本身不要求采用全新的方法,就没有必要仅仅为了变革的目的而采用新方法。 在设计的初始阶段,应该允许设计人员充分发挥创造性,不受各种约束。即使产生了许多不切实际的想法,也会在设计的早期,即绘制图纸之前被改正掉。只有这样,才不致于堵塞创新的思路。通常,要提出几套设计方案,然后加以比较。很有可能在最后选定的方案中,采用了某些未被接受的方案中的一些想法。
LED电源测试中电子负载的误区讲解及解决
电源供应器网 https://www.wendangku.net/doc/b218079402.html,/news/192449.html LED电源测试中电子负载的误区讲解及解决【大比特导读】本篇文章全面介绍了电子负载的原理,尤其对电子负载在LED 测量过程中存在的误区进行重点介绍。不仅如此,在本文当中还提出了一些可行 的解决方法,以便得到较为稳定的电流数据。希望大家在阅读过本篇文章之后能 够有所收获。 想要提高LED电源的测试效率,最快捷简便的方法就是选择恰当的电子负载。如果对电 子负载的知识不够熟悉,或者熟练度不够无法掌握的话,甚至会造成测试结果的置信度下滑, 从而影响到产品的质量,严重的还会引发事故。本篇文章主要讲述电子负载CV的原理,并 对LED电源测试的一些误区进行介绍。 电子负载的CV模式带载,是LED电源测试的基础。CV,便是恒定电压,但负载只是电 流拉载的设备,自身不能提供恒定电压,因此,所谓的CV,仅仅是通过电压负反馈电路, 来伺服LED电源输出电流的变化,使LED输出电容上的电荷平衡,进而达到恒定电压的目的。 因此,决定CV精度的核心因素有2个: 负载带宽 LED电源输出电容的大小 当LED电源输出电流的纹波频率很高时,如果负载带宽不足,便无法伺服电流变化,而 引发震荡,当震荡发生时,负载输入电压急剧变化,LED输出电容便进行频繁的大电流充放 电,此时所检测的电流纹波,将远大于LED电源稳态工作时的实际电流纹波。 当负载带宽不足时,如果LED电源的输出电容足够大,那么震荡幅度也能控制在可接受 的范围内,但遗憾的是,LED电源的价格竞争非常激烈,输出电容容量普遍不足,因此,对 LED电源进行测试,对负载带宽要求非常苛刻。 负载的带宽指标,厂家都不会直接标示,只能参考另外一个指标:满量程电流上升时间, 很显然,满量程电流上升时间越小,说明负载的带宽越高。负载带宽越高,对LED电源输出 电容的要求就越低,一般而言,10uS满量程电流上升时间的负载,能满足大多数LED电源 的测试需要,但从理论上说,任何负载在CV模式下,都有震荡的可能,在此情况下,当LED 输出电容不变的情况下,负载带宽越高,震荡幅度也就越小,测试结果置信度就越高,因此, 用户在使用电子负载进行测试时,必须密切关注负载输入电压纹波Vpp的变化,一旦其超出 范围,整个测试结果便不再可信,此点非常重要,用户必须谨记。 在CV模式下,恒定的是电压,而电流纹波通常是非常大的,而负载为提高测试效率, 数据刷新频率往往较高,因此数据跳动很大,很多用户以此来判定负载是否适合进行LED 测试,其实这是一个非常严重的误区,数据的稳定与否,其实是非常容易实现的,只需要加 大数据滤波的时间测度就可以实现,很短低端电子负载,因为测量精度低,因此不得不进行
外文翻译
第一部分 摘要: 计算、通信和传感技术的快速进步给控制领域提供了前所未有的机会, 以适应国家的经济和国防需求从而扩大它的贡献。这份报告提出了一个专家小组特许检查的发现和建议。我们的报告包含控制的概述,成功和影响,并描述了它的新的挑战。我们不要试图覆盖整个领域。相反,我们关注的这些地区正在经历最快速变化,所以要求使用新的方法来满足社会面临的挑战和机遇。 控制的概述 本报告中控制定义指的是使用算法和反馈工程系统。最简单的方面,控制系统是一个用来通过计算和修改一个系统行为驱动的设备。控制系统工程的历史可以追溯到工业革命,离心调速器等设备,如图1.1所示。这个设备使用一个飞球机制,汽机的轮转速和调整蒸汽流入机器使用一系列的联系。因此通过调节涡轮的速度,它提供了安全、可靠、一致的操作需要使蒸汽动力工厂的迅速蔓延。 控制在技术的发展中扮演了至关重要的部分,比如电力,通讯,交通和制造。例子包括自动驾驶仪在军用和商用飞机(图 1.2A),调节和控制电力网,并在磁盘的读/写磁头定位精度高驱动器(图1.2B)。反馈是在各种应用领域的使能技术,已被彻底改造,并在不同环境下获得专利很多次。 图1.1,离心调速(一),在18世纪80年代开发的,是一个 成功的瓦特蒸汽机的推动者(二),这推动了工业革命。剑桥大学图提供者。 控制的现代观点认为反馈作为不确定性管理的工具。通过测量系统的操作,与参照相比较,调节可用的控制变量,我们可以使系统正确响应,即使其动态行为是不完全已知的,或者外部干扰导致它错误地响应。这是在工程系统中一个重要的特征,因为它们必须在各种条件下进行可靠和有效地操作。这个方面恰恰正是控制对于不确定性为了确保稳健性的一种手段,解释了在现代科技,世界为什么反馈控制系统都在我们身边。他们在我们的家、汽车和消费类电子产品里,在我们的工厂和通讯系统中,在我们的交通运输、军事和航天系统中。 控件的使用极其广泛,包括了许多不同应用程序。这些包括机电系统控制,计算机控制的执行器和传感器调节系统的行为;电子系统控制,反将被用来补偿元件或参数的变化,提供可靠的、
第一性原理计算原理和方法精编
第一性原理计算原理和 方法精编 Document number:WTT-LKK-GBB-08921-EIGG-22986
第二章 计算方法及其基本原理介绍 化学反应的本质是旧键的断裂和新建的形成,参与成键原子的电子壳层重新组合是导致生成稳定多原子化学键的明显特征。因此阐述化学键的理论应当描写电子壳层的相互作用与重排,借助求解满足适当的Schrodinger 方程的波函数描写分子中电子分布的量子力学,为解决这一问题提供了一般的方法,然而,对于一些实际的体系,不引入一些近似,就不可能求解其Schrodinger 方程。这些近似使一般量子力学方程简化为现代电子计算机可以求解的方程。这些近似和关于分子波函数的方程形成计算量子化学的数学基础。 SCF-MO 方法的基本原理 分子轨道的自洽场计算方 法(SCF-MO)是各种计算方法的理论基础和核心部分,因此在介绍本文计算工作所用方法之 前,有必要对其关键的部分作 一简要阐述。 Schrodinger 方程及一些基本近似 为了后面介绍各种具体在自洽场分子轨道(SCF MO)方法方便,这里将主要阐明用于本文量子化学计算的一些重要的基本 R AB =R 图2-1分子体系的坐标
近似,给出SCF MO 方法的一些基本方程,并对这些方程作简略说明,因为在大量的文献和教材中对这些方程已有系统的推导和阐述[1-5]。 确定任何一个分子的可能稳定状态的电子结构和性质,在非相对论近似下,须求解定态Schrodinger 方程 ''12121212122ψψT p B A q p A p pA A pq AB B A p A A A E R Z r R Z Z M =??????? ?-++?-?-∑∑∑∑∑∑≠≠ () 其中分子波函数依赖于电子和原子核的坐标,Hamilton 算符包含了电子p 的动能和电子p 与q 的静电排斥算符, ∑∑≠+?-=p q p pq p e r H 12121?2 以及原子核的动能 ∑?-=A A A N M H 2121? 和电子与核的相互作用及核排斥能 ∑∑≠+-=p A B A AB B A pA A eN R Z Z r Z H ,21? 式中Z A 和M A 是原子核A 的电荷和质量,r pq =|r p -r q |,r pA =|r p -R A |和R AB =|R A -R B |分别是电子p 和q 、核A 和电子p 及核A 和B 间的距离(均以原子单位表示之)。上述分子坐标系如图所示。可以用V(R,r)代表-式中所有位能项之和 ∑∑∑-+=≠≠p A pA A B A q p pq AB B A r Z r R Z Z r R V ,12121),( 原子单位
随车液压起重机的控制外文翻译、中英文翻译、外文文献翻译
附录A 译文 随车液压起重机的控制 摘要:本文主要是描述随车液压起重机的控制过程。这篇论文分为五个部分:需求分析,液压系统以及存在的问题的分析,不同结构产生不同问题的分析,基于更加先进复杂电液比例控制阀的新技术的发展趋势的分析。本文的研究工作是和实际的工业相结合的,比纯粹的研究理论更有意义。 关键字:随车液压起重机,控制策略,电液比例控制阀 1.引言 本文主要叙述的是对随车起重机控制系统的改进方法 随车汽车起重机可以看成是一种大型柔性控制机械结构。这种控制系统把操作人员的命令由机械结构变为执行动作。 这样定义这种控制系统是为了避免在设计它事产生模糊的思想这是一种通过人的命令把能量转化成机械动作的控制系统。本文所写的就是这种控制系统。以这个目标为指导方针来分析怎样设计出新的控制系统。 文章分为五个部分: 1.分析这种控制系统必须据有易操作性,高强度,高效性,稳定性,安全性。 2.分析目前这种操作系统所存在的问题。 3.从不同的方面分析这种控制系统:不同的操作方式,不同的控制方法,不 同的组织结构。 4.介绍一种适合于未来工业的比较经济的新的控制系统。 5.分析一种据有高性能,高效率,易控制等的比较好的控制系统。它将成为 今后研究的比较经济高效的一种方案。 2. 论文部分 2.1 对控制系统必备条件的分析 在一种新的操作系统开始正式投入工作之前,对这种控制系统据有严格的要求。对控制系统的影响有很多因素。例如:机械结构的可实行性因素,可操作性因素,效率因素,符合工业标准。 工业需求必须放在第一位。这与在控制系统中导管破裂保护和超载保护有同等的地位。
其次稳定性要求也很重要;系统不稳定就没法正常工作。一旦稳定性要求得以确定,控制系统性能要求就可以进一步确定。机械结构决定了起重机的可操作性。机械机构是随车起重机中可以往复转动固有频率低的大型柔性结构。 为了防止起重机振动,必须使起重机在固有频率下工作,或者提高起重机的固有频率。如果它的固有频率太低或者太高,操作人员将无法给它进行操作。最后传动效率可以在工业标准,稳定性,执行机构确定的基础上得到最优的方案。 2.2 对目前这种控制系统的分析 在设计一种新的起重机之前,研究目前起重机存在的问题是很有必要的。当前液压随车起重机主要存在以下三个问题: 1.不稳定性 2.不经济性 3.低效性 2.2.1 不稳定性 不稳定性是一个严重问题,他可能会损伤操作人员或者会是设备受到毁坏。当一个系统不稳定时通常产生严重振动。为了消除当前系统的不稳定性,设计人员既花费了很多时间来研究又花费了很多财力设计出更加复杂的机构。如图1所示为一种起重机,它适合于在高速下工作。但是为了可以安全的工作必须合理控制其运行速度。要提高它的控制速度又必须增加更加昂贵复杂的机械系统。 液压系统的参数,如温度或压力同样影响系统的稳定性。一个参数合理的液压系统比一个设计参数不合理的液压系统稳定,为了使整个系统运行稳定,有时必须降低次要的参数值。 2.2.2 不经济性 目前的液压系统是纯液压的机械系统,因此如果用户想实现一个功能,他就必须买一个能使现这个功能的液压机械组件。因为大多数用户又不同的使用要求,要求同一个设备可以进行升级。这就意味着这些标准设备可以人为的改造,这就增加了组件升级费用。 2.2.3 低效性 液体在液压系统的两个液压缸之间流动时效率较低。这是因为大多数液压阀都是用一个阀心来控制两个节流口,由于这个链接不可能使阀芯两侧的压力相