码垛机器人的动力学仿真及控制研究

码垛机器人的动力学仿真及控制研究
蓝培钦言勇华
(上海交通大学机器人研究所,上海200240)
Study of dynamic simulation and control algorithm of palletizing robot
LAN Pei-qin ,YAN Yong-hua
(Research Institute of Robotics ,Shanghai Jiao Tong University ,Shanghai 200240,China )
文章编号:1001-3997(2010)07-0149-03
【摘
要】动力学是高速码垛机器人设计过程中必须考虑的问题,但要建立机器人精确的动力学模
型比较困难。通过UG 建立机器人实体模型,并将其导入ADAMS ,在仿真环境中调整相应参数,得到机器人的动力学仿真模型,再利用SIMULINK 建立控制框图,通过两者的结合进行机器人控制系统仿真。机器人控制算法采用基于CMAC 与PID 的复合控制,仿真结果表明该复合控制算法可有效地用于机器人实
时控制。与传统PID 控制算法相比较,机器人的响应速度、控制精度,鲁棒性等动态特性得到了明显的提高。
关键词:机器人控制;动力学仿真;小脑模型神经网络;ADAMS ;MATLAB/SIMULINK
【Abstract 】A simulation model is built to analyze the dynamics of palletizing robot.The 3D solid model of the robot was created using UG and imported to ADAMS .Constraints was defined between bod -ies ,and the control block diagram was designed using SIMULINK .A parallel controller based on CMAC and PID was applied in this simulation model.Finally the simulation results show high precision and re -sponse speed of the proposed algorithm.
Key words :Robot control ;Dynamics simulation ;CMAC-PID ;ADAMS ;MATLAB/SIMULINK
中图分类号:TH16,TP242文献标识码:A
1引言
在机器人的机构设计和控制系统设计过程中,机器人仿真技术为机器人研制和试验提供了必要和快速的验证,对降低产品设计成本,缩短开发周期,提高系统性能具有不可替代的作用。机器人仿真涉及三维实体模型实现,运动控制,动力学动态仿真。建立
和实际情况接近一致的机器人本体及控制仿真模型,可为实现机
器人的本体优化设计及控制算法改进提供理论依据。在控制系统计算机辅助设计领域MATLAB 是最优秀的软件,而在多体动力学仿真领域ADAMS 是建立动力学模型最简单快捷的工具,结合两者各自的优点,完成了机器人本体和控制系
改进后的遗传算法产生的路径更短,且由于能量项与拐弯半径、拐弯次数有关,从图4中我们可见改进后的路径拐弯角度更大,
即路径相对更加光滑,以及拐弯次数更加少,改进前为5次,而改进后为2次。可见改进后的遗传算法进化速度更加快,得到的路径比较适合于此特定的移动机器人。
(a )改进前的遗传算法(b )改进后的遗传算法
图4障碍物的分布简图
4总结
针对传统遗传算法应用于机器人路径规划的缺点,进行了一系列的改进,考虑机器人本身的尺寸,基于闵科夫斯基原理对障
碍物进行扩展,找出机器人真正可行的区域;以及提出了符合机器人实际情况的适应度函数,将路径长度与能量结合一起考虑;为了避免遗传算法进入局部最优解,对选择算子进行改进,引入相似性的概念,从而扩大种群的种类。从以上的仿真结果可见这些的改进能更快的获得质量高的路径。但对于动态不规则形体障
碍物的避障还有待改善。
参考文献
1Yang S X ,Meng M.An efficient neural network approach to dynamic robot
motion planning [J ].Neural Networks ,2000,13(2):1432王洪博,孙红霞等.遗传算法在移动机器人静态全局路径规划中的应用[J ].自动控制,2008(3):103~1143孙树栋,曲彦宾.遗传算法在机器人路径规划中的应用研究[J ].西北工业
大学学报,
1998,16(1):79~834李擎,冯金玲等.自适应遗传算法在移动机器人路径规划中的应用[J ].北京科技大学学报,2008,30(3):316~323
5雷英杰等.MATLAB 遗传算法工具箱及应用[M ].西安:西安电子科技大学出版社,2005,1~616AHMED ELSHAMLI ,Mobile robots path planning optimization in static and dynamic environments [D ].The Faculty of Graduate Studies of The Univer -sity of Guelph ,2004:43~103
0123456789x 012341011314151617181920212242526272829303132336373839404142434647505152535657606162636465666768697071747576787980818485868990
919293949596979899
123456789y 0123456789x 0123410131417181920212425262728293031323637383940414243464750515253565760616263646566676869707172737475767879808182838485868990
919293949596979899
0123456789y
*来稿日期:2009-09-18
Machinery Design &Manufacture
机械设计与制造
第7期
2010年7月
149
统模型的仿真设计,并在此基础上进行机器人控制算法的研究。2动力学仿真模型
2.1UG 建立三维实体模型
利用UG 三维软件构造码垛机器人系统的实体模型,并使其真实地反映物理样机的特性参数。
机器人的模型,如图1所示。由四部分组成:腰转部件、大臂、小臂和腕部,共有四个自由度。
机器人工具末端的位置通过控制腰部、大臂和小臂的关节来实现,工具末端的姿态则通过控制腰部和手腕关节的转动来实现。腕部摆动关节采用两个串联平行四边形结构,使腕部保持垂直于地面的姿态,从而减少了一个关节的控制。
2.2ADAMS 建立虚拟样机
通过UG 建立的三维实体模型还不能进行动力学分析,需将其导入到多体动力学仿真软件ADAMS 。在ADAMS 里通过以下步骤来建立机器人的虚拟样机:
(1)在UG 中把零件或组件另存为parasolid binary 格式,文件后缀为.xmt_txt ,在ADAMS 里导入该文件,类型选择model name 。
(2)在ADAMS 中编辑各个构件的属性,添加各个构件之间的约束和运动副,以及外界条件。
(3)定义模型中各个关节的控制力矩,关节角度和速度,输入及输出状态变量等。
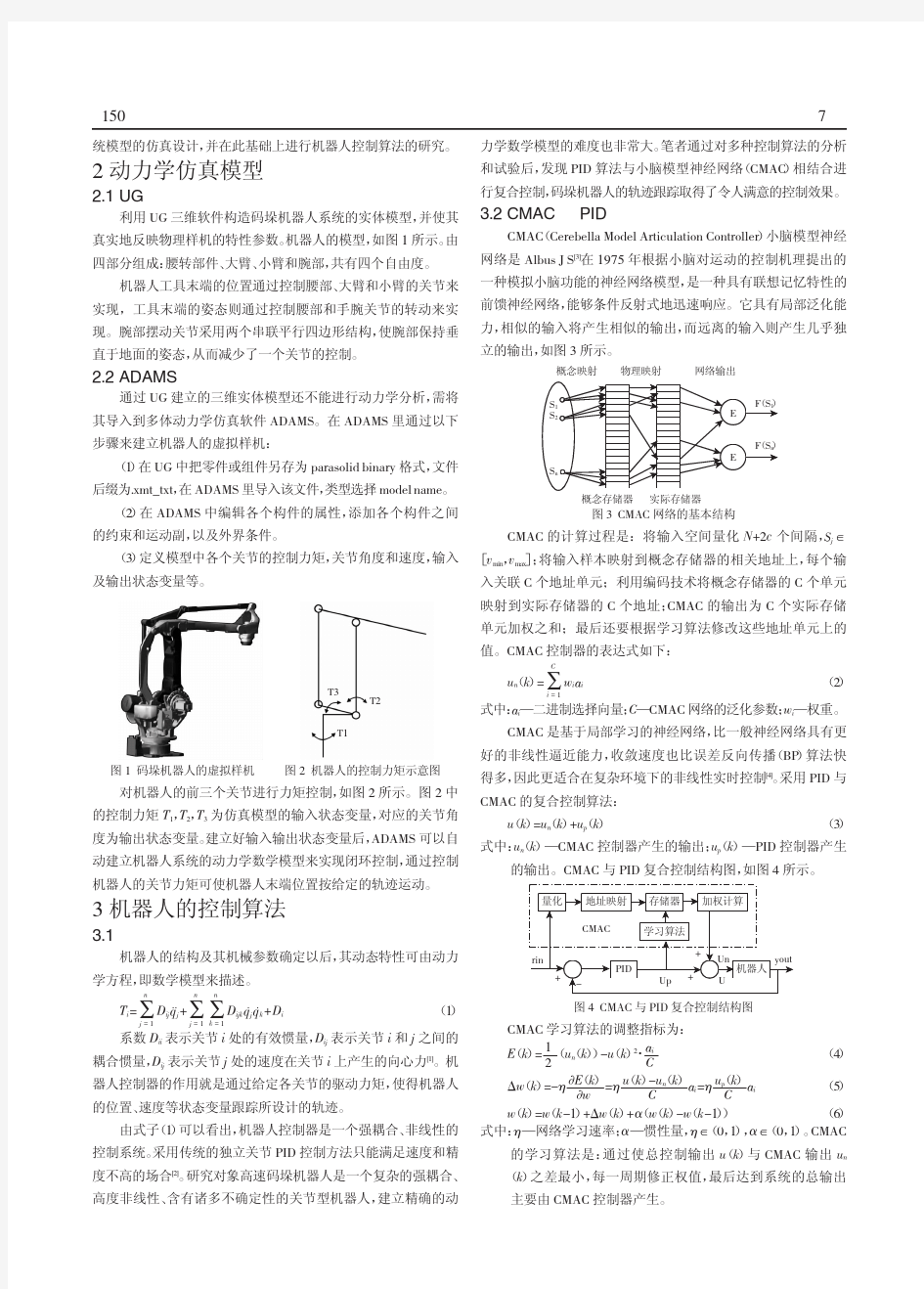
图1码垛机器人的虚拟样机图2机器人的控制力矩示意图
对机器人的前三个关节进行力矩控制,如图2所示。图2中的控制力矩T 1,T 2,T 3为仿真模型的输入状态变量,对应的关节角度为输出状态变量。
建立好输入输出状态变量后,ADAMS 可以自动建立机器人系统的动力学数学模型来实现闭环控制,通过控制机器人的关节力矩可使机器人末端位置按给定的轨迹运动。
3机器人的控制算法
3.1机器人控制算法概况
机器人的结构及其机械参数确定以后,其动态特性可由动力学方程,即数学模型来描述。
T i =n
j =1
ΣD ij q
咬j +n
j =1Σn
k =1
ΣD ijk q 觶j q 觶k +D i (1)
系数D ii 表示关节i 处的有效惯量,D ij 表示关节i 和j 之间的耦合惯量,D ij 表示关节j 处的速度在关节i 上产生的向心力[1]。机器人控制器的作用就是通过给定各关节的驱动力矩,使得机器人的位置、速度等状态变量跟踪所设计的轨迹。
由式子(1)可以看出,机器人控制器是一个强耦合、非线性的控制系统。采用传统的独立关节PID 控制方法只能满足速度和精度不高的场合[2]。研究对象高速码垛机器人是一个复杂的强耦合、高度非线性、含有诸多不确定性的关节型机器人,建立精确的动
力学数学模型的难度也非常大。
笔者通过对多种控制算法的分析和试验后,发现PID 算法与小脑模型神经网络(CMAC )相结合进行复合控制,码垛机器人的轨迹跟踪取得了令人满意的控制效果。
3.2CMAC 与PID 的复合控制算法
CMAC (Cerebella Model Articulation Controller )小脑模型神经网络是Albus J S [3]在1975年根据小脑对运动的控制机理提出的一种模拟小脑功能的神经网络模型,是一种具有联想记忆特性的前馈神经网络,能够条件反射式地迅速响应。它具有局部泛化能力,相似的输入将产生相似的输出,而远离的输入则产生几乎独立的输出,如图3所示。
图3CMAC 网络的基本结构
CMAC 的计算过程是:将输入空间量化N+2c 个间隔,S j ∈[v min ,v max ];将输入样本映射到概念存储器的相关地址上,每个输入关联C 个地址单元;利用编码技术将概念存储器的C 个单元映射到实际存储器的C 个地址;CMAC 的输出为C 个实际存储单元加权之和;最后还要根据学习算法修改这些地址单元上的值。CMAC 控制器的表达式如下:
u n (k
)=C
i =1
Σw i a i (2)
式中:a i —二进制选择向量;C —CMAC 网络的泛化参数;w i —权重。
CMAC 是基于局部学习的神经网络,比一般神经网络具有更好的非线性逼近能力,收敛速度也比误差反向传播(BP )算法快得多,因此更适合在复杂环境下的非线性实时控制[4]。采用PID 与CMAC 的复合控制算法:
u (k )=u n (k )+u p (k
)(3)
式中:u n (k )—CMAC 控制器产生的输出;u p (k
)—PID 控制器产生的输出。CMAC 与PID 复合控制结构图,如图4所示。
图4CMAC 与PID 复合控制结构图
CMAC 学习算法的调整指标为:
E (k )=12(u n (k
))-u (k )2·a i
C
(4)△w (k )=-η坠E (k )=ηu (k )-u n (k )a i =ηu p (k )a i (5)w (k )=w (k-1)+△w (k )+α(w (k )-w (k-1))(6)式中:η—网络学习速率;α—惯性量,η∈(0,1),α∈(0,1)。CMAC
的学习算法是:通过使总控制输出u (k )与CMAC 输出u n (k )之差最小,每一周期修正权值,最后达到系统的总输出主要由CMAC 控制器产生。
概念映射物理映射
网络输出
概念存储器
实际存储器
S 1
S 2
S n
F (S 1
)F (S n
)E
E
T3
T2
T1
地址映射加权计算
存储器量化
学习算法
PID
机器人
CMAC
rin
Un yout
+
+
+
-U
Up
第7期
蓝培钦等:码垛机器人的动力学仿真及控制研究150
采用PID 控制器单独控制时,增益参数的值在很大程度上决定着控制效果,但是机器人负载变化的时候PID 参数都需要适当调整才能达到最好的控制效果,因此PID 参数大小决定了系统控制品质的优劣。而采用PID 和CMAC 复合控制时控制效果不依赖于k p 的值,k p 只需在一个合理范围内即可,这就增强了控制器的适应性[5][6]。
4机器人的动力学仿真
虚拟样机技术提供了两种将机器人动力学和控制一体化的方法。第一种是利用ADAMS/View 提供的控制工具箱,可以利用其中的线性模块和滤波模块建立一些简单的控制算法,最后在ADAMS/View 中完成系统的仿真和分析。第二种方法是利用ADAMS/Controls 模块,将机器人样机模型导出到控制分析软件中,如MATLAB 或EASY5,
在控制分析软件中完成比较复杂的控制算法,最后可以从ADAMS 或控制分析软件中得到联合仿真结果[7]。
采用SIMULINK 与ADAMS 的结合方法,利用ADAMS/Con -trols 模块,将ADAMS 中的机器人的动力学模型封装为SIMULINK 的一个模块,利用SIMULINK 设计控制器框图,如图5所示。“机器人模型”就是从ADAMS 导入到SIMULINK 的模块,左边3个输入是前三个关节的驱动力矩,右边3个输出分别是前三个关节的角度。
采用S 函数编写期望轨迹输入模块,而PID 和PID-CMAC 控制策略利用MATLAB 函数模块实现,用代码方式来实现算法更为方便快捷。这种方法的仿真过程形象逼真,大大减少控制策略的改变和参数调整所花费的时间。在图中ADAMS 模块设置Animation mode 为interactive ,还可以实时看到机器人的三维动态效果。
图5CMAC-PID 复合控制器的SIMULINK 模型
5仿真结果
在SIMULINK 中设置系统采样时间为4ms ,仿真总时间为6s ,第一关节的期望轨迹,如图6所示。加速度采用梯形过渡的方法。第一关节PID 控制三个参数分别为k p =10000,k i =0,k d =5000,单独PID 控制和CMAC-PID 复合控制时三个参数保持不变。CMAC 神经网络参数取N =400,C =6,惯性量α=0.05,学习速率η=0.008。
图6第一关节的期望轨迹
图7单独PID 与CMAC-PID 的跟踪误差比较
图8CMAC-PID 复合控制输出力矩
如图6~图8所示,机器人第一个关节的仿真结果。由图7可以看出,CMAC-PID 复合控制比单独PID 控制具有更小的跟踪误差。由图8可以看出,
CMAC-PID 复合控制的总输出力矩主要由CMAC 控制器产生,与前面所叙述的CMAC 学习算法一致。
6结论
通过MATLAB 和ADAMS 平台所建立的机器人控制模型,验证了小脑模型关节控制器(CMAC )和PID 复合控制比一般工业机器人控制器所采用的独立关节PID 控制具备更高的响应速度和控制精度,利用CMAC 神经网络实现前馈控制,减少了机器人的输出误差,使机器人具有更好的轨迹跟踪效果。
直接从ADAMS 模型中产生机器人动力学数学模型,而不用推导复杂的动力学方程,很大程度上简化了建模过程。在ADAMS 建立好动力学模型后,可以将动力学模型封装起来,把时间用来专注于控制策略的改进,充分体现了现代设计方法的思想。既缩短开发周期,提高设计质量和效率,也避免对物理样机的危险操作。这种仿真手段可推广到其他机器人的研究和开发中。
参考文献
1Niku ,S.B.Introduction to Robotics :Analysis ,Systems ,Application [M ].New Jersey :Prentice Hall ,2001
2许春山.机器人关节转矩力控制系统的关键问题研究[D ].上海交通大学学报,
20033Albus J S.A New Approach to Manipulator Control :The Cerebellar Model Articulation Controller (CMAC )[J ].Transaction of ASME :Journal of Dy -namic Systems ,Measurement ,and Control ,1975
4Chengwei Li ,Tao Song ,Yonghong Xu.The research and simulation in the liquid -level based on CMAC -PID controller [J ].IEEE International Conference on Integration Technology ,2007:348~351
5Jianghua Guo ,Shuhai Liang ,Guojun Chen.Application of CMAC Neural Network &PID Control on the Speed Control System of Diesel Engine [J ].Intelligent Control and Automation ,
2006:2840~28446刘金锟.先进PID 控制及其MATLAB 仿真
[M ].北京:电子工业出版社,20037范成建.虚拟样机软件MSC.ADAMS 应用与提高[M ].北京:机械工业出版社,2006
时间(s )
1
2
34
5
6
弧度
1.510.50-0.5-1加速度
速度轨迹
时间(s )
1
2
345
6
位置误差
0.030.020.010-0.01-0.02-0.03
CMAC-PID 控制
PID 控制
时间(s )
1
2
34
5
6
力矩
4002000-200-400-600
PID 控制
CMAC 输出总输出
CMAC 算法
PID 算法
ln1Out1MATLAB
Function S_function 期望轨迹
机器人模型(ADAMS )
+-机械设计与制造
No.7Jul.2010
151
机器人的动力学控制
机器人的动力学控制 The dynamics of robot control 自123班 庞悦 3120411054
机器人的动力学控制 摘要:机器人动力学是对机器人机构的力和运动之间关系与平衡进行研究的学科。机器人动力学是复杂的动力学系统,对处理物体的动态响应取决于机器人动力学模型和控制算法。机器人动力学主要研究动力学正问题和动力学逆问题两个方面,需要采用严密的系统方法来分析机器人动力学特性。本文使用MATLAB 来对两关节机器人模型进行仿真,进而对两关节机器人进行轨迹规划,来举例说明独立PD 控制在机器人动力学控制中的重要作用。 Abstract: for the robot dynamics is to study the relation between the force and movement and balance of the subject.Robot dynamics is a complex dynamic system, on the dynamic response of the processing object depending on the robot dynamics model and control algorithm.Kinetics of robot research dynamics problem and inverse problem of two aspects, the need to adopt strict system method for the analysis of robot dynamics.This article USES MATLAB to simulate two joints, the robot, in turn, the two joints, the robot trajectory planning, to illustrate the independent PD control plays an important part in robot dynamic control. 一 动力学概念 机器人的动力学主要是研究动力学正问题和动力学逆问题两个方面,再进一步研究机器人的关节力矩,使机器人的机械臂运动到指定位臵,其控制算法一共有三种:独立PD 控制,前馈控制和计算力矩控制,本文主要介绍独立PD 控制。 动力学方程:)()(),()(q G q F q q q C q q M +++=? ????τ
码垛机器人说明书
码垛机器人说明书
前言 本说明书阐述了此四自由度码垛机器人使用方法。请仔细阅读并理解此说明书后使用机器人。打开包装请先对照装箱清单检查配件是否齐全,若有遗漏请尽快与我们联系。
目录 概述............................................... 错误!未定义书签。机器人的搬运及安装................................. 错误!未定义书签。 警告标示....................................... 错误!未定义书签。 机器人安装环境................................. 错误!未定义书签。 机器人运动范围及安全围栏安装................... 错误!未定义书签。 机器人的搬运方法............................... 错误!未定义书签。 基座安装尺寸................................... 错误!未定义书签。 机器人端持器的安装............................. 错误!未定义书签。 气路连接....................................... 错误!未定义书签。机器人控制柜的搬运与安装........................... 错误!未定义书签。 注意事项....................................... 错误!未定义书签。 机器人控制箱安装环境........................... 错误!未定义书签。 机器人控制箱的内部电气接线..................... 错误!未定义书签。 机器人控制箱的搬运............................. 错误!未定义书签。 机器人控制箱的外部连接......................... 错误!未定义书签。机器人系统与生产线的连接........................... 错误!未定义书签。机器人操作方法..................................... 错误!未定义书签。 机器人的开关机.................................. 错误!未定义书签。 操作界面的认识.................................. 错误!未定义书签。 操作界面的使用方法.............................. 错误!未定义书签。常见故障分析及处理................................. 错误!未定义书签。 机器人无法运行................................. 错误!未定义书签。 机器人未按既定规划运行......................... 错误!未定义书签。 机器人系统提示“系统正在运行”................. 错误!未定义书签。机器人保养与维护................................... 错误!未定义书签。 机械部件的养护.................................. 错误!未定义书签。 控制系统的维护.................................. 错误!未定义书签。
02-课件:5-4 机器人动力学建模(牛顿-欧拉法)
连杆动力学方程(牛顿-欧拉递推方法) 将机器人的连杆看成刚体,其质心加速度、总质量、角速度、 角加速度、惯性 张量与作用力矩满足如下关系: 牛顿第二定律 (力平衡方程) ()/ci i ci i ci d m dt m ==f v v 欧拉方程 (力矩平衡方程)()()/c c c ci i i i i d dt ==+?i i i n I ωI ω ωI ω
连杆动力学方程(牛顿-欧拉递推方法)
欧拉方程公式推导 v 为质心移动速度(移动时与惯性力相关)坐标系旋转时,惯性张量不是常量()()/c c c ci i i i i d dt ==+?i i i n I ωI ωωI ω ()() =[()] =[] =()c c c ci i i i c c i i i c c i i i c c i i i d d dt dt S ==+++?+?i i i i i i i i i n I ωI ωωI I ωωωI I ωωωI I ωωI ω ()()g d m dt =?+??+N I ωωI ωρ×v
力和力矩平衡方程 i i+1i-1iP i+1i fi i n i i f i+1i n i+1连杆i 在运动情况下,作用在上面 的合力为零,得力平衡方程式 (暂时不考虑重力): (将惯性力作为静力来考虑) 1 11f f R f +++=-i i i i ci i i i
力和力矩平衡方程 作用在连杆i 上的合力矩等于零,得力矩平衡方程式:1111111i i i i i i i i i ci i i i ci ci i i i +++++++=- -?-?n n R n r f P R f 将上式写成从末端连杆向内迭代的形式:111i i i i i i i ci +++=+f R f f 1111111i i i i i i i i i i i i ci ci ci i i i +++++++=++?+?n R n n r f P R f 利用这些公式可以从末端连杆n 开始,顺次向内递推直至到操作臂的基座。
搬运码垛机器人毕业设计
搬运码垛机器人毕业设计 Prepared on 22 November 2020
目录1
1绪论 研究背景及意义 随着现代社会科技水平日新月异的变化,机器人技术已经渗透到人类生活中的方方面面,演着不可替代的角色。机器人是多个学科技术综合而成的产物,其应用程度已经逐渐宽广起来研究机器人已经成为了当今时代的趋势。机器人的应用状况已经可以作为权衡一个国家现化程度高低的重要因素。从机器人工作的环境来对机器人进行分类,大体上能划分成两种,就是工业机器人与特种机器人。工业机器人是一种具有良好性能的自动化机械装置,是典型的含有很高科技含量的机电一体化产品。它在提高产品质量、增加经济效益、提高生产率方面起着重要作用。同时工业机器人的发展情况也是日新月异的,所以研发工业机器人是一件刻不容缓的事情。 码垛是随着物流产业的不断壮大而发展起来的一项高新技术,其思想是把物品按照一定规律码放在托盘上,从而能够使物品的存放、搬运、转移等活动变成单元化操作,从而大大提高物流运输的效率。在物料质量不大、尺寸不大、码垛速度要求不高的情况下,码垛工作都是通过人工来实现的。后来为了减轻工人在码垛时的工作强度,产生了托盘操作机、工业机械手等一些比较简单的机械设施。但是随着人们对码垛速度要求的不断提高,传统的人工码垛方式越来越难以达到人们的要求,这种情况下码垛机器人应运而生。 作为工业机器人典型的一种,码垛机器人技术近几年有着非常快速的发展,这样的发展速度和当今世界制造业的小批量、多种类的发展模式是十分吻合的。码垛机器人有着工作能力强、运行速度快、体积比较小、抓取种类多、应用范围广等特点,从而在市场上备受青睐,正因为这些优点,才使得码垛机器人被普遍应用于制造业、码垛、装配、焊接等诸多操作中。 近年来,袋装物品的需求和产量都十分巨大,进而对袋装物品进行运输的需求也在急剧增长。在我国有大量的袋装物品需要进行码垛、卸垛和运输。目前,对袋装物品的火车运输来讲,火车站台卸车、站台码垛、运输装车、运输卸车、库房码垛等工
工业机器人静力及动力学分析
注:1)2008年春季讲课用;2)带下划线的黑体字为板书内容;3)公式及带波浪线的部分为必讲内容第3章工业机器人静力学及动力学分析 3.1 引言 在第2章中,我们只讨论了工业机器人的位移关系,还未涉及到力、速度、加速度。由理论力学的知识我们知道,动力学研究的是物体的运动和受力之间的关系。要对工业机器人进行合理的设计与性能分析,在使用中实现动态性能良好的实时控制,就需要对工业机器人的动力学进行分析。在本章中,我们将介绍工业机器人在实际作业中遇到的静力学和动力学问题,为以后“工业机器人控制”等章的学习打下一个基础。 在后面的叙述中,我们所说的力或力矩都是“广义的”,包括力和力矩。 工业机器人作业时,在工业机器人与环境之间存在着相互作用力。外界对手部(或末端操作器)的作用力将导致各关节产生相应的作用力。假定工业机器人各关节“锁住”,关节的“锁定用”力与外界环境施加给手部的作用力取得静力学平衡。工业机器人静力学就是分析手部上的作用力与各关节“锁定用”力之间的平衡关系,从而根据外界环境在手部上的作用力求出各关节的“锁定用”力,或者根据已知的关节驱动力求解出手部的输出力。 关节的驱动力与手部施加的力之间的关系是工业机器人操作臂力控制的基础,也是利用达朗贝尔原理解决工业机器人动力学问题的基础。 工业机器人动力学问题有两类:(1)动力学正问题——已知关节的驱动力,求工业机器人系统相应的运动参数,包括关节位移、速度和加速度。(2)动力学逆问题——已知运动轨迹点上的关节位移、速度和加速度,求出相应的关节力矩。 研究工业机器人动力学的目的是多方面的。动力学正问题对工业机器人运动仿真是非常有用的。动力学逆问题对实现工业机器人实时控制是相当有用的。利用动力学模型,实现最优控制,以期达到良好的动态性能和最优指标。 工业机器人动力学模型主要用于工业机器人的设计和离线编程。在设计中需根据连杆质量、运动学和动力学参数,传动机构特征和负载大小进行动态仿真,对其性能进行分析,从而决定工业机器人的结构参数和传动方案,验算设计方案的合理性和可行性。在离线编程时,为了估计工业机器人高速运动引起的动载荷和路径偏差,要进行路径控制仿真和动态模型的仿真。这些都必须以工业机器人动力学模型为基础。 工业机器人是一个非线性的复杂的动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间。因此,简化求解过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 在这一章里,我们将首先讨论与工业机器人速度和静力学有关的雅可比矩阵,然后介绍工业机器人的静力学问题和动力学问题。
码垛机设计方案
码垛机设计方案(一) 一:系统方案概述经对贵公司产品、场地的分析,技术需求、指标的详细研究和理解,为了充分满足该技术要求,对本工程我们采用方案附图所示的机器人码垛系统。 一:总体方案 本机器人码垛系统,通过品质一流品牌的接近开关、按钮开关、可编程控制器等硬件和专家设计的专门控制软件相结合,实现了从客户自身的包装线出来的站立式包装袋到最后的码垛成型,均为无人的高度自动化系统。完善的安全联锁机制,可以对设备和操作人员提供保护。图形显示的触摸屏使整个系统操作简单,故障诊断容易,同时方便了检修和维护。并且每套系统出厂都经过严格的系统测试,保证客户的运行安全、可靠、稳定。 本机器人码垛系统如附图1所示,由1.倒包线、2.提升线、3.整形线、4.抓取线、5.码垛机器人,五部分构成。其各部分工作过程和其主要功能阐述如下: 1倒包线 2提升线3整形线4抓取线5码垛机器人
从称量秤、缝包机等客户末端出来的袋装产品均为站立式,通过输送机,当包装袋到达倒包线(附图2所示)时,包装袋会接触到其①倒包横梁,自身倒在②倒包板上,然后通过③防滑输送带的传送和④导向滚筒的导向,包装袋会自动调整为长度方向与流水线平行的纵向输送。且此倒包线为高度可以调整型。如果客户在更换产品,导致包装袋长度、称量秤输送线的高度有更改时,此倒包线可以通过其升降按钮,来驱动自身的升降电机,做高度的自动调整。 附图2:倒包线 由于产品从不同高度,客户端输送和倒包线有高度调整,为了更好统一的做码垛规划,最大发挥码垛机器人的功效和码垛能力,现增加提升线(附图3所示)将倒包线出来的包装袋提升到某一统一高度。此提升线为配合前段的自动升降,亦增加有自动升降按钮,可以调节升降电机控制单边提升高度与前段平齐,保证后端高度不变。 ①倒包横梁 ②倒包板 ③防滑输送带 ④导向滚筒
机器人系统常用仿真软件介绍
1 主要介绍以下七种仿真平台(侧重移动机器人仿真而非机械臂等工业机器人仿真): 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人,可以被用于研究和教学,除此之外,USARSim是RoboCup救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。使用开放动力学引擎ODE(Open Dynamics Engine),支持三维的渲染和物理模拟,较高可配置性和可扩展性,与Player兼容,采用分层控制系统,开放接口结构模拟功能和工具框架模块。机器人控制可以通过虚拟脚本编程或网络连接使用UDP协议实现。被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。机器人和环境可以通过第三方软件进行生成。软件遵循免费GPL条款,多平台支持可以安装并运行在Linux、Windows和MacOS操作系统上。 1.2 Simbad Simbad是基于Java3D的用于科研和教育目的多机器人仿真平台。主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。它拥有可编程机器人控制器,可定制环境和自定义配置传感器模块等功能,采用3D虚拟传感技术,支持单或多机器人仿真,提供神经网络和进化算法等工具箱。软件开发容易,开源,基于GNU协议,不支持物理计算,可以运行在任何支持包含Java3D库的Java客户端系统上。 1.3 Webots Webots是一个具备建模、编程和仿真移动机器人开发平台,主要用于地面机器人仿真。用户可以在一个共享的环境中设计多种复杂的异构机器人,可以自定义环境大小,环境中所有物体的属性包括形状、颜色、文字、质量、功能等也都可由用户来进行自由配置,它使用ODE检测物体碰撞和模拟刚性结构的动力学特性,可以精确的模拟物体速度、惯性和摩擦力等物理属性。每个机器人可以装配大量可供选择的仿真传感器和驱动器,机器人的控制器可以通过内部集成化开发环境或者第三方开发环境进行编程,控制器程序可以用C,C++等编写,机器人每个行为都可以在真实世界中测试。支持大量机器人模型如khepera、pioneer2、aibo等,也可以导入自己定义的机器人。全球有超过750个高校和研究中心使用该仿真软件,但需要付费,支持各主流操作系统包括Linux, Windows和MacOS。 1.4 MRDS-Microsoft Robotics Developer Studio MRDS是微软开发的一款基于Windows环境、网络化、基于服务框架结构的机器人控制仿真平台,使用PhysX物理引擎,是目前保真度最高的仿真引擎之一,主要针对学术、爱好者和商业开发,支持大量的机器人软硬件。MRDS是基于实时并发协调同步CCR(Concurrency and Coordination Runtime)和分布式软件服务DSS(Decentralized Software Services),进行异步并行任务管理并允许多种服务协调管理获得复杂的行为,提供可视化编程语言(VPL)和可视化仿真环境(VSE)。支持主流的商业机器人,主要编程语言为C#,非商业应用免费,但只支持在Windows操作系统下进行开发。 1.5 PSG-Player/Stage/Gazebo
码垛机器人系统设计
( 分类号: 学校代码: 10128 U D C : 学 号: 201130101045 科研训练开题报告 题 目:码垛机器人控制系统设计 学生姓名:刘金来 学 院:机械学院 班 级:机制11-3 指导教师:武建新 二零一四年十二月
1.选题目的和意义 近几年机器人自动化生产线已经不断出现,机器人自动化生产线的市场也会越来越大,并且逐渐成为自动化生产线的主要方式,而过去的自动化码垛作业大部分是由机械式码垛机完成或人工搬运,由于机械式码垛机其结构等因素的限制,存在着占地面积大、程序更改麻烦(甚至无法更改)、耗电量大等缺点;而人工搬运劳动量大,完成同一工作量所需不少工人,在一些实际场所应用中,码垛机器人与传统码垛机一样,一次能搬运一整层箱子,有些顾客在传统码垛机坏了时,就用机器人代替,通常这些机器人系统都有层成型平台和臂尾加工装置,能将整层箱子搬起来,功能较强的码垛机器人还能更换不同的货盘;其码垛速度甚至可以达到100个小箱/分钟;码垛机器人装有低水平纸箱横进给装置,使用灵活底盘,有利于车间的良好布局;另外其性能可靠,大多用户容易掌握使用的软件,能够迅速转换对进行不同箱子的码垛。2.国内外研究现状及其发展趋势 2.1课题来源:内蒙古工业大学 2.2码垛机器人控制系统设计的发展前景 作为先进制造业中不可替代的重要装备和手段,工业机器人已经成为衡量一个国家制造水平和科技水平的重要标志。 据相关统计数据表明,工业机器人主要用于汽车工业及汽车零部件工业,占整个机器人市场的61%,金属制品业占8%、橡胶及塑料工业和电子电气行业分别占7%,食品工业占2%,其他工业占15%。 依赖进口——我国工业机器人之阵痛 目前,我国进口的工业机器人主要来自日本,随着我国从劳动密集型向现代化制造业方向发展,虽然机器人保有量达到一定的规模,但与发达国家相比仍然有不少差距。 仅从汽车工业每百万名生产工人占有的机器人来讲,(日本1710台、意大利1600台、美国770台、英国610台、瑞典630台,而我国还不到90台),中国仍然是世界上相对比较落后的国家。面对中国这样庞大的市场,每一个机器人供应商都有着非常大的用武之地。 产业化不足——我国工业机器人之弊端 20世纪90年代末,我国建立了9个机器人产业化基地和7个科研基地。产业化
简单串联机器人ADAMS仿真
机械系统动力学 简化串联机器人的运动学与动力学仿真分析 学院:机械工程学院 专业:机械设计制造 及其自动化 学生姓名: 学号: 指导教师: 完成日期: 2015.01.09
摘要 在机器人研究中,串联机器人研究得较为成熟,其具有结构简单、成本低、控制简单、运动空间大等优点,已成功应用于很多领域。本文在ADAMS 中用连杆模拟两自由度的串联机器人(机械臂),对其分别进行运动学分析、动力学分析。得出该机构在给出工作条件下的位移、速度、加速度曲线和关节末端的运动轨迹。 关键词:机器人;ADAMS;曲线;轨迹 一、ADAMS软件简介 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.) (现已并入美国MSC公司)开发的虚拟样机分析软件。目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。 二、简化串联机器人的运动学仿真 (1)启动ADAMS/View。 在欢迎对话框中选择新建模型,模型取名为robot,并将单位设置为MMKS,然后单击OK。 (2)打开坐标系窗口。 按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗口。当鼠标在图形区移动时,在坐标窗口中显示了当前鼠标所在位置的坐标值。
码垛机器人技术进展及方案设计
码垛机器人技术进展及方案设计
研究生课程论文封面课程名称:机器人技术及应用 论文题目:码垛机器人研究进展及方案设计学生班级;机械工程 学生姓名:黄凰 任课教师:王中任 学位类别:专业硕士 评分标准及分值选题与参 阅资料 (分 值) 论文内容 (分 值) 论文表 述 (分 值) 创新性 (分 值) 评分
确的完成抓取工作,抓取后对工件进行分类码垛。 关键词:机器人,码垛,视觉
码垛机器人研究进展及方案设计 1. 机器人概述 近年来,机器人技术发展非常迅速,各种用途的机器人在各个领域得到广泛的应用。于此同时,码垛技术也获得了飞速发展,尤其是机器人码垛发展更为迅猛,这种发展趋势是与当今制造领域出现的多品种小批量的发展趋势相适应的[1][2]。码垛机器人是用在工业生产过程中执行大批量工件、包装件的获取、搬运、码垛、拆垛等任务的一类工业机器人,是集机械、电子、信息、智能技术、计算机科学等学科于一体的高新机电产品[3]。码垛机器人技术在解决劳动力不足、提高劳动生产效率、降低生产成本、降低工人劳动
强度、改善生产环境等方面具有很大潜力[4]。国外从 20 世纪 60 年代开始研究工业机器人,码垛机器人是伴随着工业机器人技术的发展而出现的,日本、德国、美国等发达国家的研究已取得一定成果,我国在这方面的研究刚起步不久,还需加快研究步伐,提高研究水平,为我国物流包装企业的生产和发展做出贡献[5]。 最早将工业机器人技术用于物体的码放和搬运是日本和瑞典[6]。20世纪70年代末日本第一次将机器人技术用于码垛作业。1974年,瑞典ABB公司研发了全球第一台全电控式工业机器人IRB6,主要应用于工件的取放和物料的搬运[7]。除此之外,德国、意大利、韩国等国家工业机器人的研发水平也相当高。随着计算机技术、工业机器人技术以及人工智能控制等技术的发展和日趋成熟,日本、德国、美国、瑞典、意大利、韩国等国家在包装码垛机器人的研究上做了大量工作,相应推出了自己的码垛机器人,如日本的 FANUC [8]和 OKURA 以及 FUJI 系列,德国的KUKA 系列[9],瑞典的 ABB 系列等。 德国、瑞典以及日本等国家的码垛机器人一般
机器人机械臂运动学分析(仅供借鉴)
平面二自由度机械臂动力学分析 [摘要] 机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 [关键字] 平面二自由度 一、介绍 机器人是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 机器人动力学问题有两类: (1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。这对实现机器人动态控制是相当有用的。 (2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。也就是说,给出关节力矩向量τ,求机器人所产生的运动。这对模拟机器人的运动是非常有用的。 二、二自由度机器臂动力学方程的推导过程 机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: (1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。 (2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时, F r为力矩。 (3) 求出机器人各构件的动能和势能,构造拉格朗日函数。 (4) 代入拉格朗日方程求得机器人系统的动力学方程。 下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
机器人动力学汇总
机器人动力学研究的典型方法和应用 (燕山大学 机械工程学院) 摘 要:本文介绍了动力学分析的基础知识,总结了机器人动力学分析过程中比较常用的动力学分析的方法:牛顿—欧拉法、拉格朗日法、凯恩法、虚功原理法、微分几何原理法、旋量对偶数法、高斯方法等,并且介绍了各个方法的特点。并通过对PTl300型码垛机器人弹簧平衡机构动力学方法研究,详细分析了各个研究方法的优越性和方法的选择。 前 言:机器人动力学的目的是多方面的。机器人动力学主要是研究机器人机构的动力学。机器人机构包括机械结构和驱动装置,它是机器人的本体,也是机器人实现各种功能运动和操作任务的执行机构,同时也是机器人系统中被控制的对象。目前用计算机辅助方法建立和求解机器人机构的动力学模型是研究机器人动力学的主要方法。动力学研究的主要途径是建立和求解机器人的动力学模型。所谓动力学模指的是一组动力学方程(运动微分方程),把这样的模型作为研究力学和模拟运动的有效工具。 报告正文: (1)机器人动力学研究的方法 1)牛顿—欧拉法 应用牛顿—欧拉法来建立机器人机构的动力学方程,是指对质心的运动和转动分别用牛顿方程和欧拉方程。把机器人每个连杆(或称构件)看做一个刚体。如果已知连杆的表征质量分布和质心位置的惯量张量,那么,为了使连杆运动,必须使其加速或减速,这时所需的力和力矩是期望加速度和连杆质量及其分布的函数。牛顿—欧拉方程就表明力、力矩、惯性和加速度之间的相互关系。 若刚体的质量为m ,为使质心得到加速度a 所必须的作用在质心的力为F ,则按牛顿方程有:ma F = 为使刚体得到角速度ω、角加速度εω= 的转动,必须在刚体上作用一力矩M , 则按欧拉方程有:εωI I M += 式中,F 、a 、M 、ω、ε都是三维矢量;I 为刚体相对于原点通过质心并与刚
码垛机器人使用说明
码垛机器人使用说明 非常感谢贵公司购买码垛机器人。 本系统是将上流传送带传送过来的产品按一定的堆放形状放置到托盘上的码垛机器人设备。 1.功能概述 为适应我国在石油、化工领域的快速发展,我们在吸收国外先进技术的基础上,自主开发了RB200型垂直多关节型机器人。 RB200型码垛机器人是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种规定作业的机电一体化生产设备。其主要由机械本体、伺服驱动系统、手臂机构、末端执行器(抓手)、末端执行器姿态调节机构以及检测机构等构成,它根据不同的物料包装、堆垛顺序、层数要求等进行参数设置,实现不同类型物料包装的码垛作业。 2.码垛机器人与传统机械式码垛机比较,特点如下: 2.1.结构简单、零部件少。因此零部件的故障率低、性能可靠、保养维修简单、所需库 存零部件少。 2.2.占地面积小。有利于客户厂房的总体布置,并可留出较大的库房面积。 2.3.适用性强。当客户产品的尺寸、体积、形状及托盘的外形尺寸发生变化时只需在触 摸屏上稍做修改即可,不会影响客户的正常的生产,甚至一台码垛机器人可同时对两条包装不同物料的生产线进行码垛操作。 2.4.能耗低。传统机械式码垛机的功率在26kW左右,而码垛机器人的功率为10kW, 能大大降低客户的长期运行成本。 3.主要技术特点:
3.1.码垛机器人具有4个自由度,分别为手臂的两个关节沿垂直轴、水平轴作直线运动, 机械本体和抓手绕各自的回转轴作回转运动。 3.2.手臂采用平行四边形连杆机构,由伺服电机通过带轮、同步带、滚珠丝杠、直线导 轨驱动,并采用末端执行器姿态调节机构,使末端执行器(抓手)实现垂直轴、水平轴无藕合线性运动。 3.3.机械本体用于承载手臂机构及其驱动机构,机械本体安装在交叉滚子轴承上,由伺 服电机通过精密摆线减速机驱动,实现码垛机器人在水平面内的回转作业。 3.4.抓手腕部回转由伺服电机通过精密摆线减速机驱动。 3.5.机械手主要材料采用铝合金型材,具有质量轻,动作灵活等特点。 4.主要技术指标: 码垛最大能力:1200bags/h 橡胶:600bags/h 最大载荷:200kg 结构形式:4自由度关节型 运动模式:柱面坐标 动作范围 Z轴(垂直):2300mm X轴(水平):1500mm θ轴(本体回转):330° a轴(手腕回转):330° 5.动作范围: 图1码垛机器人动作范围 6.工作原理: 码垛机器人(如下图2)包括手腕1、手臂机构2、手腕姿态调整机构3、机架4、底座12、机械手20以及手臂机构2的伺服驱动系统等。手臂机构2由AC、BF、FD、CE四个连杆构成,其中AC连杆的BC杆段与CD、DF、FB等连杆构成平行四边形,BC
码垛机器人使用说明讲解学习
码垛机器人使用说明
码垛机器人使用说明 非常感谢贵公司购买码垛机器人。 本系统是将上流传送带传送过来的产品按一定的堆放形状放置到托盘上的码垛机器人设备。 1.功能概述 为适应我国在石油、化工领域的快速发展,我们在吸收国外先进技术的基础上,自主开发了RB200型垂直多关节型机器人。 RB200型码垛机器人是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种规定作业的机电一体化生产设备。其主要由机械本 体、伺服驱动系统、手臂机构、末端执行器(抓手)、末端执行器姿态 调节机构以及检测机构等构成,它根据不同的物料包装、堆垛顺序、层 数要求等进行参数设置,实现不同类型物料包装的码垛作业。 2.码垛机器人与传统机械式码垛机比较,特点如下: 2.1.结构简单、零部件少。因此零部件的故障率低、性能可靠、保养维修 简单、所需库存零部件少。 2.2.占地面积小。有利于客户厂房的总体布置,并可留出较大的库房面积。 2.3.适用性强。当客户产品的尺寸、体积、形状及托盘的外形尺寸发生变 化时只需在触摸屏上稍做修改即可,不会影响客户的正常的生产,甚 至一台码垛机器人可同时对两条包装不同物料的生产线进行码垛操 作。
2.4.能耗低。传统机械式码垛机的功率在26kW左右,而码垛机器人的功率 为10kW,能大大降低客户的长期运行成本。 3.主要技术特点: 3.1.码垛机器人具有4个自由度,分别为手臂的两个关节沿垂直轴、水平 轴作直线运动,机械本体和抓手绕各自的回转轴作回转运动。 3.2.手臂采用平行四边形连杆机构,由伺服电机通过带轮、同步带、滚珠丝 杠、直线导轨驱动,并采用末端执行器姿态调节机构,使末端执行器 (抓手)实现垂直轴、水平轴无藕合线性运动。 3.3.机械本体用于承载手臂机构及其驱动机构,机械本体安装在交叉滚子轴 承上,由伺服电机通过精密摆线减速机驱动,实现码垛机器人在水平 面内的回转作业。 3.4.抓手腕部回转由伺服电机通过精密摆线减速机驱动。 3.5.机械手主要材料采用铝合金型材,具有质量轻,动作灵活等特点。 4.主要技术指标: 码垛最大能力:1200bags/h 橡胶:600bags/h 最大载荷:200kg 结构形式:4自由度关节型 运动模式:柱面坐标 动作范围 Z轴(垂直): 2300mm X轴(水平): 1500mm θ轴(本体回转): 330° a轴(手腕回转): 330° 5.动作范围:
09-10四自由度码垛机器人控制系统设计
四自由度码垛机器人控制系统设计 一、四自由度码垛机器人简介 随着科技工业自动化的发展,很多轻工业都相继通过自动化流水线作业.尤其是食品工厂,后道包装机械作业使用一些成套设备不仅效率提高几十倍,生产成本也降低了。其中四自由度码垛机器人每天自动对1000箱食品进行托盘处理,这些码垛机器人夜以继日地工作,从不要求增加工资。码垛机器人的应用越来越广。码垛机器人配备有特殊定制设计的多功能抓取器,不管包装箱尺寸或重量如何,机器人都可以使用真空吸盘牢固地夹持和传送包装箱。如图1所示,四自由度码垛机器人本体由腰部、大臂、小臂、腕部组成。 图1 码垛机器人简图腰部大臂 小臂腕部
如图2所示,码垛机器人具有独特的线性执行机构,使其保证了手部在水平与垂直方向的平行移动。 图2 码垛机器人的线性执行机构运动示意图 此四自由度码垛机器人的应用案例如图3所示。具有示教作业简单,现场操作简便。 图3 码垛机器人的应用案例
二、四自由度码垛机器人控制要求及其控制方案 1、控制要求 如图1所示,四自由度码垛机器人的运动主要由控制腰部、大臂、小臂、腕部的驱动电机实现。在此均采用松下A5伺服电机;抓取部件等其他辅助运动采用气动,由电磁阀动作来控制抓取部件的动作。 四自由度码垛机器人的运动控制系统主要包括感知部分、硬件部分和软件部分,其运动控制系统的主要任务是要控制此机器人在工作空间中的运动位置、姿态和轨迹以及作业流程等。此外,还要求: 1)防碰撞检测和在线编程控制,可以进行离线仿真; 2)人机界面友善、高度可靠作性和安全性; 3)便携式触摸屏示教器、全中文界面; 4)利用使能开关双电路设计使在紧急状态下自动切断伺服动作,从而保证安全。 2、控制方案 控制方案1:基于PLC的运动控制方案 基于PLC的机器人运动控制系统,一般利用触摸屏进行人机交互。在触摸屏上的人机界面,由组态软件编写人机操作界面实现人机交互;PLC则通过I/O 模块与码垛机器人以及现场设备通信并实现控制,通过接受PLC的控制命令,实现机器人及其周边、物流设备的启停与协调,同时将码垛机器人及其周边、物流设备的运行状态返回给PLC。 控制方案2:基于嵌入式PC的运动控制方案
基于动力学模型的轮式移动机器人运动控制_张洪宇
文章编号:1006-1576(2008)11-0079-04 基于动力学模型的轮式移动机器人运动控制 张洪宇,张鹏程,刘春明,宋金泽 (国防科技大学机电工程与自动化学院,湖南长沙 410073) 摘要:目前,对不确定非完整动力学系统进行设计的主要方法有自适应控制、预测控制、最优控制、智能控制等。结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器的设计和研究进展进行综述,并分析今后的重点研究方向。 关键词:轮式移动机器人;动力学模型;运动控制;非完整系统 中图分类号:TP242.6; TP273 文献标识码:A Move Control of Wheeled Mobile Robot Based on Dynamic Model ZHANG Hong-yu, ZHANG Peng-cheng, LIU Chun-ming, SONG Jin-ze (College of Electromechanical Engineering & Automation, National University of Defense Technology, Changsha 410073, China) Abstract: At present, methods of non-integrity dynamic systems design mainly include adaptive control, predictive control, optimal control, intelligence control and so on. Based on analyzing the recent results in modeling of WMR dynamics, a survey on motion control of WMR based on dynamic models was given. In addition, future research directions on related topics were also discussed. Keywords: Wheeled mobile robot; Dynamic model; Motion control; Non-integrity system 0 引言 随着生产的发展和科学技术的进步,移动机器人系统在工业、建筑、交通等实际领域具有越来越广泛的应用和需求。进入21世纪,随着移动机器人应用需求的扩大,其应用领域已从结构化的室内环境扩展到海洋、空间和极地、火山等环境。较之固定式机械手,移动机器人具有更广阔的运动空间,更强的灵活性。移动机器人的研究必须解决一系列问题,包括环境感知与建模、实时定位、路径规划、运动控制等,而其中运动控制又是移动机器人系统研究中的关键问题。故结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器设计理论和方法的研究进展进行研究。 1 WMR动力学建模 有关WMR早期的研究文献通常针对WMR的运动学模型。但对于高性能的WMR运动控制器设计,仅考虑运动学模型是不够的。文献[1]提出了带有动力小脚轮冗余驱动的移动机器人动力学建模方法,以及WMR接触稳定性问题和稳定接触条件。文献[2]提出一种新的WMR运动学建模的方法,这种方法是基于不平的地面,从每个轮子的雅可比矩阵中推出一个简洁的方程,在这新的方程中给出了车结构参数的物理概念,这样更容易写出从车到接触点的转换方程。文献[3]介绍了与机器人动作相关的每个轮子的雅可比矩阵,与旋转运动的等式合并得出每个轮子的运动方程。文献[4]基于LuGre干摩擦模型和轮胎动力学提出一种三维动力学轮胎/道路摩擦模型,不但考虑了轮胎的径向运动,同时也考虑了扰动和阻尼摩擦下动力学模型,模型不但可以应用在轮胎/道路情况下,也可应用在对车体控制中。在样例中校准模型参数和证实了模型,并用于广泛应用的“magic formula”中,这样更容易估计摩擦力。在文献[5]中同时考虑运动学和动力学约束,其中提出新的计算轮胎横向力方法,并证实了这种轮胎估计的方法比线性化的轮胎模型好,用非线性模型来模拟汽车和受力计算,建立差动驱动移动机器人模型,模型本身可以当作运动控制器。 2 WMR运动控制器设计的主要发展趋势 在WMR控制器设计中,文献[6]给出了全面的分析,WMR的反馈控制根据控制目标的不同,可以大致分为3类:轨迹跟踪(Trajectory tracking)、路径跟随(Path following)、点镇定(Point stabilization)。轨迹跟踪问题指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随给定的参考轨迹。路径跟随问题是指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随指定的几何 收稿日期:2008-05-19;修回日期:2008-07-16 作者简介:张洪宇(1978-)男,国防科学技术大学在读硕士生,从事模式识别与智能系统研究。 ,
二自由度机器人的位置控制
实验二自由度机器人的位置控制 一、实验目的 1. 运用Matlab语言、Simulink及Robot工具箱,搭建二自由度机器人的几何模 型、动力学模型, 2. 构建控制器的模型,通过调整控制器参数,对二自由度机器人的位姿进行控 制,并达到较好控制效果。 二、工具软件 1.Matlab软件 2.Simulink动态仿真环境 3.robot工具箱 模型可以和实际中一样,有自己的质量、质心、长度以及转动惯量等,但需要注意的是它所描述的模型是理想的模型,即质量均匀。这个工具箱还支持Simulink的功能,因此,可以根据需要建立流程图,这样就可以使仿真比较明了。 把robot 工具箱拷贝到MATLAB/toolbox文件夹后,打开matalb软件,点击file--set path,在打开的对话框中选add with subfolders,选中添加MATLAB/toolbox/robot,保存。这是在matlab命令窗口键入roblocks就会弹出robot 工具箱中的模块(如下图)。
三、实验原理 在本次仿真实验中,主要任务是实现对二自由度机器人的控制,那么首先就要创建二自由度机器人对象, 二自由度机器人坐标配置 仿真参数如下表1: 表1 二连杆参数配置
1.运动学模型构建二连杆的运动学模型,搭建twolink模型在MATLAB命令窗口下用函数drivebot(WJB)即可观察到该二连杆的动态位姿图。 %文件名命名为自己名字的首字母_twolink %构造连杆一 L{1}=link([0 0.45 0 0 0],'standard') ; L{1}.m=23.9 ;
一种自行车机器人动力学分析和仿真
一种自行车机器人的动力学分析与仿真 邹俊 (北京邮电大学自动化学院,北京100876) 摘要:自行车是一种高效而且环保的交通工具。但自行车动力学特征较为复杂,从控制学角度说,其本身就是一个欠驱动的不稳定系统。行驶中的自行车的动力学模型相对复杂,受外界因素干扰很大,如不同的地面情况和风速的影响,很难完全模拟。因此,自行车的自动控制的发展是一项具有挑战意义的主题。本文提出了一种自行车机器人的建模方法并设计了车把控制器,并用仿真实验验证了其正确性。 关键词:自行车机器人;自动控制;稳定性 中国图书分类号:TP273.5 Modeling and Simulation of Autonomous Bicycle Abstract: Bicycle is an efficient and environment-friendly transport. However, the dynamics of bicycle is complicated. From the control point of view, it is an under actuated nonholonomic system. The dynamics of bicycle is relatively complicated, and very susceptible to disturbance from outside, such as different ground conditions and wind speed, and it is difficult to fully simulate. Thus, the development of automatic control for driving a bicycle is a challenging theme. This paper presents a dynamic model of bicycle and designs a steer controller. Simulation is performed to prove the validity of this controller. Key words: Autonomous Bicycle; Automatic Control; Stability 0引言 自行车是一种高效而且环保的交通工具。自从1818年,德国人德莱斯(Baron Karivon Drais)在法国巴黎发明了带车把的木制两轮自行车以来,自行车给人类的生活带来了极大的便利,同时,人们也在对其进行不断的改进[1][2]。2006年,日本著名的机器人“村田顽童”更是向人们展示了行走坡道和S型平衡木、倒车行走,检测障碍物,进入车库,手机遥控操作,发声、播放音乐等功能。到目前为止,自行车机器人已经取得一定的研究成果,其研究内容主要围绕动力学建模和提出新的控制算法两方面内容展开的。 自行车与倒立摆有很大的相似性,然而前者动力学特性更加复杂,可以利用模糊神经网络控制、非线性控制等控制方法来建模和设计控制器。同时,自行车机器人还涉及到传感器技术、自适应控制、机械力学、无线通信等众多学科。因此,无论在理论和实践中都具有十分重要的意义。 1动力学分析及建模