IS-091116-YHSC (BDMC3606、2803在创意之星上的使用说明)

BDMC3606/2803在创意之星上的使用说明
编制人:徐俊辉
时间:09-11-16
版本号:V1.0.0 一、接线方法
(1)、驱动器线序定义及接线
左侧接线端子L1~L10 右侧接线端子R1~R10
如上表所示,左侧端子接驱动器电源、电机正负、编码器信号等,右侧端子接驱动器控制信号。驱动器有4种工作模式:RS-232指令模式、模拟电压模式、PPM脉冲模式、PWM 脉冲模式,在创意之星控制器上,有8个PPM接口,可直接控制8个驱动器。8个PPM端口的ID号分别是224、225、226、227、228、229、230、231。
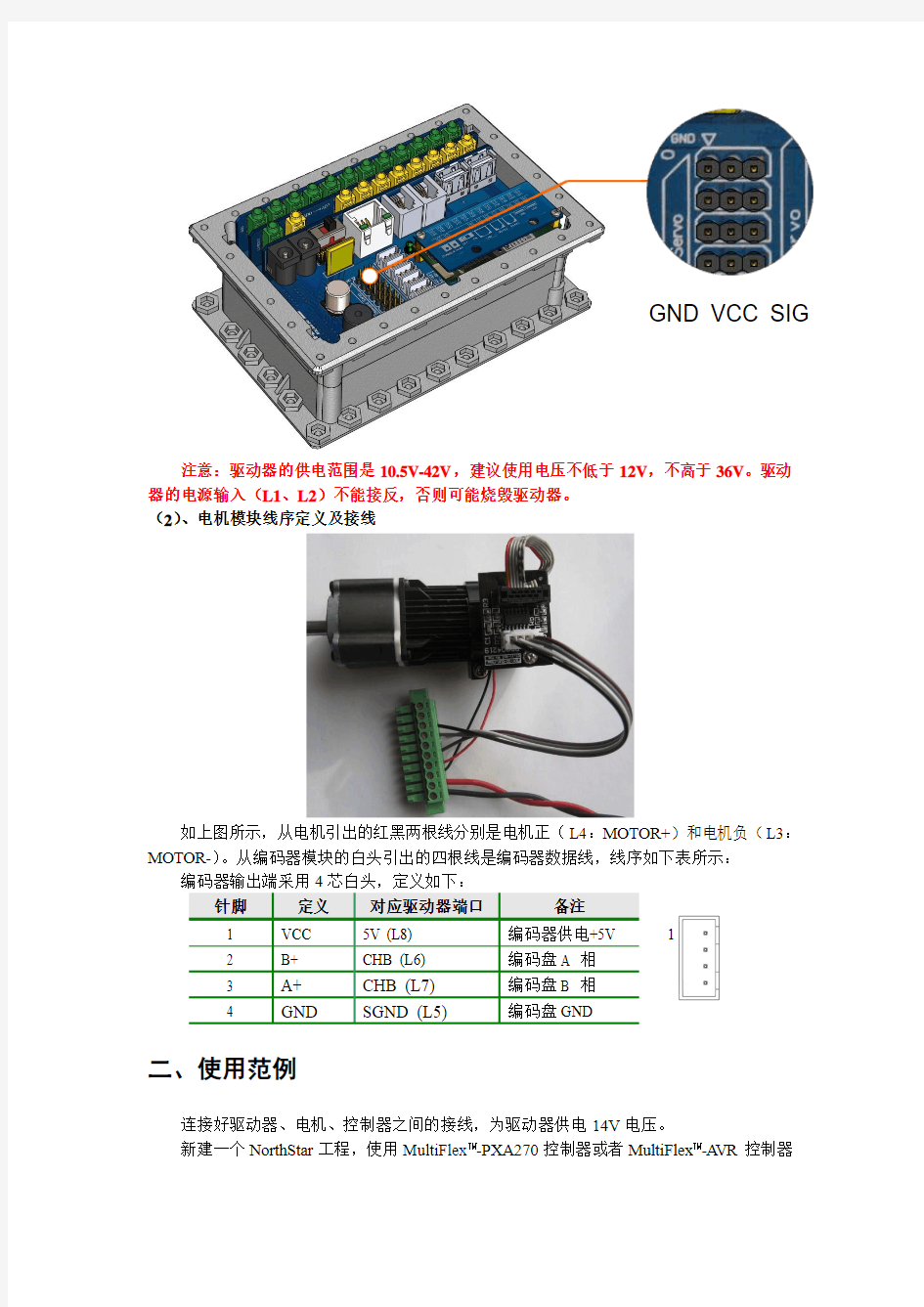
如下所示,控制器的GND接驱动器SGND(R5),SIG接驱动器的PULSE(R7),注意控制器的VCC悬空,不接到驱动器上。
注意:驱动器的供电范围是10.5V-42V ,建议使用电压不低于12V ,不高于36V 。驱动器的电源输入(L1、L2)不能接反,否则可能烧毁驱动器。 (2)、电机模块线序定义及接线
如上图所示,从电机引出的红黑两根线分别是电机正(L4:MOTOR+)和电机负(L3:MOTOR-)。从编码器模块的白头引出的四根线是编码器数据线,线序如下表所示:
编码器输出端采用4芯白头,定义如下:
1
二、使用范例
连接好驱动器、电机、控制器之间的接线,为驱动器供电14V 电压。
新建一个NorthStar 工程,使用MultiFlex ?-PXA270控制器或者MultiFlex ?-AVR 控制器
GND VCC SIG
都可以,编写程序如下图所示:
下载到控制器上,可以看到电机往正负方向旋转起来,周期为10s 。需要注意的是:由于驱动器所驱动的电机多种多样,NorthStar 舵机控件属性的1000不是指电机的绝对速度,而是相对速度,0对应电机速度0,1023对应电机最大速度。
三、驱动器设置
BDMC3606驱动器具有多种工作模式和工作参数,专为创意之星使用的BDMC3606出厂前都已经设置完毕,您无需修改。如果在使用中由于特殊情况修改了参数,您可以通过以下方法将参数复原。
电源
带有RS232接口的PC
电机(带有光电编码器)
伺服驱动器RS232连接线
1、将驱动器通过RS-232连接到PC 机上,为驱动器供电。
2、从https://www.wendangku.net/doc/c26626186.html,/ch/ProductView.asp?ID=59下载BDMC3606
调试软件并完
成安装。
3、打开MotionTerminal.exe,并通过设置端口和波特率查找到BDMC3606,您可以从软件的帮助菜单找到具体的使用方法。软件界面如下:
点击工具栏的“打开”按钮,找到文件“2342电机参数.mcp”,软件界面如下:
点击右下方的“发送文件”按钮,稍等30秒左右为驱动器重新上电复位,点击“通讯端口”按钮重新查找BDMC3606节点,能够看到一个可用的BDMC3606节点。
在输入指令框里输入gencres,如下图所示能够看到返回值为48,说明修改成功。
四、参考文档和软件
在使用过程中您或许需要以下文档:
1、BDMC3606S用户手册,https://www.wendangku.net/doc/c26626186.html,/ch/ProductView.asp?ID=59。
2、BDMC3606S调试软件,同之上的链接。
3、创意之星实验指导书,通过创意之星配套光盘获取。
4、NorthStar软件和帮助,https://www.wendangku.net/doc/c26626186.html,/ch/ProductView.asp?ID=61。
五、2342电机参数.mcp配置文件生成办法
新建一个记事本文件,将以下灰色底纹的文本复制到文本文件中。
sor4;
encres48;
por150;
i10;
ci5;
baud19200;
pcbd19200;
eepsav;
pcbd9600;
如下图所示:
将这个记事本文件保存为2342电机参数.mcp即可,注意后缀名是mcp。
综合实践活动课《易拉罐创意手工》优质教案、教学设计、课堂实录
易拉罐创意手工教学设计 教学内容:中小学综合实践活动指导纲要3-6 年纪学段,第9 创意设计与制作:在生活中收集各种材料和用具,特别是一些废旧物品,根据一定的科学原理,尝试进行创意设计,制作简单的玩具、小车、书包、垃圾箱、水火箭等,激发创新精神,提高动手实践能力。 教学目标: 1、能设计或者制作一款创意手工作品; 2、在设计或制作中参与合作,获得成就感和愉悦感; 3、培养学生善于观察,节约能源,变废为宝的意识。 教学重点: 学生能够根据老师的引导参与设计和实践活动中,积极参与并有所收获。 教学难点: 能够设计并小组合作制作一件有创意的作品。 教学准备: 剪刀、易拉罐、彩纸、胶带、小刀、小木棒、铁丝。 教学过程: 一、导入 1、创设情境 同学们看老师今天带来了什么?(易拉罐) 平时你和身边的人是怎样处理这些易拉罐的?(丢掉,做成手工、做成工艺品) 看来同学们还都是环保小卫士呢! 2、激趣引探
今天我们一起来看一看易拉罐还可以玩出什么花样!板书:易拉罐请看大屏幕:播放视频 看了视频你有什么想说的吗?根据学生的回答板书:创意手工 二、探究方法 1、图片研究我们也可以 同学们的想法都很奇特,同学们我们可以拿易拉罐来做些什么呢? 刚才同学们说了这么多新奇的想法,老师这也搜集了一些作品请看大屏幕,其实我们身边也不缺乏创作小达人,请看这几件作品就是我搜集的咱们三年级的同学自己设计制作的。 看同学们迫不及待的眼神,是不是很想尝试一下? 3、猜想并示范操作步骤 我们要想设计这样的玩具需要循序渐进!先从简单的入手,你们认为一件易拉罐制品的制作首先要干什么呢? 想好做什么怎么做;学生说适时板书:制定方案 并演示想要设计制作一个小盒子 有了想法然后呢? 拿出易拉罐和工具;学生说适时板书:准备材料和工具 展示材料工具:易拉罐、剪刀等 然后呢? 板书:动手操作并美化 演示操作过程 三、学生实践操作将方案变成作品 1、温馨提示 看来同学们都准备好要大展身手了!在操作前老师有几点提示,请
机器人创新设计作品说明材料
机器人创新设计作品说明材料学校名称:景德镇高等专科学校 作品名称:探索者机器人创新设计 作品设计成员: 作品设计时间:二零一二年十月十九日
摘要 本文主要介绍了一个基于ARM7 LPC2138,32 位的高性能主控芯片控制的探索者机器人的创新设计,该设计包括C语言编程,声控、振动、触碰、光强、闪动、黑标、白标、近红外等多种传感控制,图形化编程及便携式编程三种编程模式,能满足任何软件水平的用户实现简单或复杂的自动化控制程序及其他功能实现。 在设计中,详细的展现了探索者机器人的各个功能模块、传感器的属性功能工作状况。最后,实现整个实验功能创新设计。
目录 摘要 (1) 第一章引言 (1) 1.1 探索者机器人创新设计概 述 (2) 1.2 探索者机器人创新设计特点 (2) 1.3 探索者机器人创新设计目的 (3) 1.4 探索者机器人创新设计意义和前景 (4) 第二章、主控板 (5) 第三章、红外接收头 (5) 第四章、语音模块 (5) 第五章、LED 模块 (6) 第六章、舵机 (6) 第七章、传感器 (7) 7.1 黑标/白标传感器 (8) 7.2 近红外传感器 (8) 7.3 姿态传感器 (9) 7.4 闪动传感器 (9) 7.5 声控传感器 (10) 7.6 触碰传感器 (10) 7.7 振动传感器 (11) 7.8 触须传感器 (11) 7.9 光强传感器 (11) 第八章、编程手柄说明 (12) 第九章、C 语言编程基础指南 (13) 9.1 安装编程环境 (13) 9.2 第一个ARM 软件 (18) 9.3 烧写程序 (21) 9.4 ARM 主控板端口列表 (22) 9.5 库函数 (24) lib_io.c………………………………….…………………….………… 24
创意之星模块化机器人实验程序
第一次实验:MultiFLEX控制卡编程实验 蜂鸣器实验 #include
{ write_gpio(~((uint16)io_out)); delay(5);//延时5×20MS=0.1s io_out<<=1; write_gpio(~((uint16)io_out)); delay(5); } } else write_gpio(0xFF00); } } 第二次实验:多自由度串联式机械手 #include "Public.h" #include "Usertask.h" void u ser_task(void) { uint8 array_rc[23]={0};//舵机控制数组长度为24,可控制12路舵机,舵机运动函数要求array_rc[偶数]为舵机目标角度值,array_rc[奇数]为舵机运动速度值 array_rc[0]=90; //舵机1,中位为0度(对应数值90),目标角度+20度。取值范围0-180,超过此范围程序会丢弃此数据 array_rc[1]=170;//舵机1,速度为170。取值范围0-255,超过范围程序会丢弃此数据 array_rc[2]=90;//舵机2目标角度设置 array_rc[3]=170;//舵机2转动速度设置 array_rc[4]=90+90;//舵机3 array_rc[5]=170; rc_moto_control(array_rc);//将舵机运动信息交给舵机运动函数,实现舵机运动 delay(50);//延时50*20MS= 1S,给舵机提供反应时间,此反应时间应大于舵机实际运动所需时间 array_rc[0]=90-90; array_rc[1]=170; array_rc[2]=90-90; array_rc[3]=170; array_rc[4]=90+90; array_rc[5]=170; rc_moto_control(array_rc); delay(50); array_rc[0]=90; array_rc[1]=170; array_rc[2]=90;
手工制作课程教案
科技、手工制作课程教案 方燕 一、活动目的 校本课程之一“手工制作”的开设主要是针对学生的兴趣爱好,锻炼学生的动手能力和想象能力,为一部分有特长的同学提供一个展示个性才艺的机会和空间,使他们的一技之长得到充分的发挥和展示,丰富学生的课余生活。 二、活动要求 1、按时参加活动,不得迟到早退。 2、严格遵守纪律,认真完成作品。 3、保持教室清洁卫生。 三、活动内容 运用一些用过的纸杯、彩纸及家里用剩的布料和纸张等材料制作一些手工制品。培养学生的节约和废物利用意识,锻炼学生的动手能力。适时让学生进行自主创作,培养学生的创新能力。 四、考核方式 让学生进行自主创作,制作一件废物利用的手工制品。
教学课时一课题 美丽的石头人 教学目标1、运用画、粘贴、剪拼等技能,根据自己的意愿装饰石头娃娃。 2、通过手工制作,培养学生感受美、表现美的能力,获得愉快的情绪体验。 教学重点、难点 在石头上粘贴。 教学媒体无 课前学生准备自制的石头模特、大小不一的鹅卵石若干、毛笔、水彩颜料、胶泥、胶水、皱纹纸、即时贴、毛线、布料、剪刀等辅助材料。 教学流程1、请同学们观赏石头模特的表演,引导观察娃娃的服装。 2、讨论:你喜欢哪个娃娃?他有什么特点?服装是怎么做 的?颜色搭配如何? 3、请学生帮助设计服装。 4、简单向学生介绍制作材料及注意事项。 5、学生自由选择材料制作,教师巡回指导,鼓励学生用不同 的方法制作出不同的作品。 6、制作好的作品陈列在展台,学生互相欣赏。 7、学生随音乐,进行石头模特表演。 教学效果反馈
教学课时二课题 剪贴画 教学目标培养学生的创造能力和动手能力,教会学生利用生活中常见的东西来创造美,进一步学习拼贴画的创作知识,掌握剪、抽、拼、贴的方法技巧。 教学重点、难点不同质地、不同色泽、不同花纹的布角料,运用不同的剪裁法,可获得各种各样生动有趣的形象,将这些形象加以拼和贴,用这种方法制作出来的画,就称之为布贴画。 教学媒体 课前学生准备布角料、剪刀、胶水 教学流程一、导入新课学习。 欣赏一些优秀装饰画作品,师生共议:用具有装饰风格绘画来装点居室,以各种特殊材料制成的画或壁饰来装点居室,不仅会使你的家别具一格,独创新意,而且在装饰过程中,将真正体会到发现和创造的愉快。今天我们利用不同质地、不同色泽、不同花纹的布角料,运用不同的剪裁法,变废为宝,创造生活中的美。 二、新课讲授。 1、布料与纸相比,有什么不同?(老师活动)质地不同,纹理不同,厚薄不同,花纹不同。(学生活动) 2、布贴画图稿的选色设计,根据现有布料的不同色样和纹理,设计出与之相附的底稿。 3、欣赏范作,讲解布贴画的制作方法: ⑴打底稿。将自己设计的画面构思用铅笔画在白纸上。 ⑵布料剪裁。按照画面不同的部位采用不同的颜色进行裁剪,裁剪时把所画的底稿放在布料上操作,以确保造型的准确;同时在裁剪时要注意到布料的纹理朝向。 ⑶拼贴画面。将裁剪好的布料按照刚开始的设计进行拼贴。 4、局部示范制作,让学生注意其中的操作过程,尤其是在剪裁时造型的把握。另外,在拼贴画面时,要注意到布料的色彩差异,在个别地方可留出适当的空隙,使画面看上去疏密得当,更富生机。在拼贴时注意要到纹理的走向,让学生明白不同的纹理朝向会导致不同的作业效果,使得布料的纹理更好地为整个贴画作品服务,增强视觉效果。
河南省青少年科技创新大赛中学生项目申报书
附件3.1 河南省青少年科技创新大赛 中学生项目申报书 第一部分:申报者确认事宜 (一) 我(们)确认已认真阅读大赛规则并且同意遵守规则。 我(们)确认所有申报资料属实。 我(们)授权主办单位比赛结束后无偿合理使用相关申报材料(包括公开出版等,不要求退还)。同时本人亦享有公开发表该项目资料的权利。 我(们)服从大赛评委会的决议。 所有参赛选手必须同意并且遵守以上要求,申报者及监护人必须签名确认以后才能参赛。 申报者签名:王溢洋监护人签名:王立秋 2013年12月23日 2013年12月23日 (二) 我(们)愿意加入河南省青少年科技英才俱乐部。 俱乐部设在创新大赛组委会办公室,俱乐部不收任何费用。参赛选手是否参加俱乐部不影响参赛成绩。俱乐部旨在提高为青少年参加科技创新活动进行辅导,并为青少年提供相互交流、学习的平台。 申报者签名:王溢洋监护人签名:王立秋 2013年12月23日 2013年12月23日 河南省青少年科技创新大赛组织委员会制
第二部分:参赛信息 项目名称:植物顶端优势在日常生活中的应用 申报者:王溢洋 申报者所在学校:河南省光山县第一高级中学项目辅导机构(没有可不填): 项目学科类别:请在确认的学科上划“√”,只能选择一项 □MA(数学) □PH(物理学) □CH(化学) □MI(微生物学) □EV(环境科学) □BI(生物化学) □EN(工程学) ZO(动物学) BO(植物学) ME(医药与健康学) □ES(地球与空间科学) □CS (计算机科学) □SO(社会科学) 项目所属类别:请在确认的类别上划“√” 申报者学历类别:请在确认的类别上划“√” 初中项目 A、申报者情况 说明:个人项目只填第一作者情况,集体项目须填写每位作者的情况
二年级_手工课教学设计
二年级手工制作教学设计 一.折小狗 1、通过折纸(小狗)让学生了解小狗的基本特征。 2、掌握折纸基本技能 3、能合理添画小狗。 教学重点、难点 掌握基本技能 课前学生准备 卡纸,剪刀,水彩笔 教学流程 一.引出活动内容,了解小狗基本特征 你们见过小狗吗?在哪见过? “小狗”有什么特点? 你喜欢小狗吗?想不想用小巧手把小狗变出来? 二、看步骤图折“小狗”并添画 1、(出示步骤图)教师:请小朋友看一看折“小狗”一共需要几步?(8步)在这8步中哪几步比较难,你可以和同座讨论一下。 2、谁来说说看你有什么困难?(请几名学生说出有困难的地方,其他学生帮助解决) 3、介绍材料及交代折纸要求。 我们的学生真聪明,真能干。现在就用水彩笔给美丽的小狗
加上尾巴! 4、学生操作,教师巡回指导给予能力差的学生进行指导。巡回指导时注意添画的合理性。同时将完成的作品展示给大家看教学效果反馈 三.堆雪人 3 教学目标 1.通过学生自我展示折纸来增强对折纸的兴趣 2.学生教学生锻炼其能力 3.掌握一些简单折纸 教学重点、难点:掌握一些简单折纸 课前学生准备:卡纸,剪刀等 教学流程 1.导入:小朋友们你喜欢折纸吗?喜欢看那白白的一张纸在你的小巧手下变成千变万化的形状吗? 那你会折纸吗? 2.晒一晒。请小朋友上台展示自己已掌握的折纸(适当夸奖,增强其信心) 3.教一教。通过投影仪小老师教大家折纸。(预计小朋友已掌握的折纸有:裤子板凳东南西北千纸鹤等) 4.学一学。小朋友们自己动手跟着小老师折纸 四.翻版画 教学目标 1. 唤起学生对剪纸艺术的热爱; 2. 使学生认识民间剪纸艺术,学会运用剪纸的基本技法制作剪纸作品; 3. 培养学生的创造性思维能力和动手能力。
创意之星之四足机器人
大学 专业实践课题:四足追光机器人 姓名: 学院:机械工程学院 专业:机械设计制造及其自动化 班级: 学号: 指导教师:
四足追光机器人 一、实验目的 用“创意之星”机器人套件组装可以进行追光行走的四足机器人; 二、实验套件(创意之星) 1.机械结构:基本结构件、舵机动力关节、可转向轮子、机械爪等; 2.控制系统:控制卡、舵机、直流电机、各类传感器、电源等; 3.控制软件:NorthSTAR 图形化开发环境 三、实验步骤 1、确定其基本功能 基本功能: a.在平地上通过步态设计,可以正常迈步行走。同时头部传感器检测前方光源,便于及时调整运行动作,追光行走。 b.当左侧红外线传感器检测到光源强于右侧红外线传感器检测到的光源时,机器人运行步态会改变,控制机器人左转。右侧的光源强于左侧的光源时用同样的原理控制机器人右转。 c.当两侧均检测到光源亮度相等时,调整步态,追光机器人会向前走。直至检测不到光源停止,再控制向后退。
2、机构设计 整个巡视机器人由大致三个模块组成: a.由8个舵机组成四足机器人的4条腿模块; b.由2个舵机组成四足机器人尾部部分; c.由2个红外接近传感器和1个舵机组成的感应模块。 3、机构的装配 整个四足避障机器人由1个控制板,1个舵机和两个红外接近传感器组成可转动头部,8个舵机组成主要的4条机械腿,由两个舵机构成尾部部分。整个四足机器人共由11个舵机、两个红外接近传感器及“创意之星”机器人零部件组成。 安装可分为零件的安装,部件的组装以及最后的总装过程。根据预先设计好的机器人结构方案,组装四条腿的部件、头部、尾部以及机器人主体部分,最后组装到一块,形成完整的整体结构。 4、连接电线 由于我们此次使用的是创意之星的标准套件,舵机接线、传感器模拟与数字端口的连接都及其方便简单。 5、设置各个舵机的限制参数 一方面保护所使用器件的性能,防止过载或错误操作而将其损坏;另一方面
中学生科技创新成果竞赛【精选】
附件1.2 中学生科技创新成果竞赛 一、目的分类 中学生项目按项目申报者人数分为个人项目和集体项目;按年龄段分为初中项目和高中项目;按研究学科分为数学、计算机科学、物理学、地球与空间科学、工程学、动物学、植物学、微生物学、医药与健康学、化学、生物化学、环境科学、行为与社会科学等13个学科。 二、学科分类及学科认定 (一)学科分类 1.数学(MA)——指形式逻辑或各种数字及代数计算的开发,以及这些原理的应用,包括微积分、几何、抽象代数、数论、统计学、复数分析、概率论等。 2.计算机科学(CS)——指计算机硬件和软件工程设计与开发,包括互联网技术及通信、计算机制图技术(包括人性化界面),仿真/虚拟现实技术,计算科学(包括数据结构、加密技术、编码及信息理论)等。 3.物理学(PH)——指能量及其与物质作用的原理、理论和定律,包括固态物理、光学、声学、粒子、原子物理、原子能、等离子体、超导体、流体和气体动力学、热力学、半导体物理学、磁学、量子物理学、力学、生物物理学等。 4.地球与空间科学(ES)——包括地质学、矿物学、地貌学、海洋学、气象学、气候学、天文学、洞穴学、地震学、地理学等。 5.工程学(EN)——指直接将科学原理应用于生产及实际应用的项目,包括土木工程、机械工程、航空工程、化学工程、电气工程、摄影工程、音响工程、汽车工程、船舶工程、制热与制冷工程、交通运输工程、环境工程等。 6.动物学(ZO)——指对动物的研究,包括动物遗传学、鸟类学、鱼类学、爬虫学、昆虫学、动物生态学、古生物学、细胞生理学、生理节律学、畜牧学、细胞学、组织学、动物生理学、无脊椎动物神经生理学、无脊椎动物研究等。
小学美术手工制作课教学设计
小学美术手工制作课教学设计:匠心独具巧编纸篮一教学背景: 江西省铅山县古镇河口,江南四大名镇之一。铅山的林业,茶业等资源非常丰富,随着社会的进步和经济的日益发展,铅山以毛竹为原材料的传统工艺和现代工艺结合的加工业逐渐繁荣,尤以武夷山等地的竹编花篮等工艺品更是远销国内外,享有盛誉。“五一”期间,本人带领学生来到了竹制品工厂,让学生先睹为快,大饱眼福,观看了工艺品整个制作程序,并让工艺品大师手把手教学生,亲身体验劳动的快乐。回校后,我们以纸代竹,进行竹篮的再度创作,学生的情绪空前高涨,有很强的创作欲望。 二教学对象:小学3——6年级学生 三活动材料:不同颜色的彩色卡纸3——4张,铅笔,双面胶,透明胶,美工刀,剪刀,60厘米长直尺,彩带,贴纸等。 四教学目标: 1 让学生欣赏了解我国民间传统的竹编艺术。 2 学习纸编作品的艺术表现手法。 3 培养学生热爱祖国民间艺术,热爱劳动人民的真挚情感。 4 培养学生团结合作,勤于思考,善于创新,敢于创作的精神。
五教学难,重点: 1 纸篮的编制方法,技巧和松紧等力度的掌握。 2 创作出造型独特,色彩协调,有特色装饰的个性作品。 六教学过程 (一)欣赏: 1 学生回忆工艺品竹篮制作的整个程序,并通过投影机播放伴有音乐的整个制作过程,让学生进入情境,充分调动学生的情感和积极性,让学生产生好奇并萌发强烈的创作欲望。 2 我们以纸代竹能编制出那么漂亮的作品吗?观看过程中老师分析每个环节的要点和基本技能。播放结束后,让学生讨论并总结整个制作程序。 “破”竹——编制篮底——编制篮身——“锁”口——制作提手——装饰点缀(二)借鉴 1 裁纸带(同传统工艺中的“破”竹):把各种彩卡全部裁成2厘米宽的纸带,以备编制用。 要求:纸带要裁的均匀,平直。 (三)展示: 老师展示自己精心创作的造型,风格,装饰等不同的几款作品。(学生惊讶,好奇,
家用机器人设计开题报告
百度文库 大连大学 本科毕业论文(设计)开题报告 李洋流 论 文 题 目: 学 院: 专 业、 班 级: 学 生 姓 名: 基于博创创新平台的家用清洁机器人设计 机械工程学院 机械设计制造及自动化机英 092班 卫斌乐
2013年3月20日填 、选题依据 1 .论文(设计)题目: 基于博创创新平台的家用清洁机器人设计 2.研究领域: 单片机及传感器系统设计 3.论文(设计)工作的理论意义和应用价值 当代科学技术发展的特点之一就是机械技术,电子技术和信息技术的结合,机器人就是这种结合的产物之一。现代机器人都是由机械发展而来。与传统的机器的区别在于,机器人有计算机控制系统,因而有一定的智能,人类可以编制动作程序,使它们完成各种不同的动作。随着计算机技术和智能技术的发展,极大地促进了机器人研究水平的提高。现在机器人已成为一个庞大的家族,科学家们为了满足不同用途和不同环境下作业的需要,把机器人设计成不同的 结构和外形,以便让他们在特殊条件下出色地完成任务。机器人成了人类最忠实可靠的朋友,在生产建设和科研工作中发挥着越来越大的作用。 家庭清洁机器人不但能够代替人乏味的体力劳动,还有其他人们所不具备的优点,可以 24小时甚至更长时间连续重复运转,还可以承受各种恶劣环境。因此,家庭清洁机器人是人 体局部功能的延长和发展。21世纪是敏捷制造的时代,家庭清洁机器必将在敏捷制造系统中 应用广泛。 4?目前研究的概况和发展趋势 随着现代化生产技术的提高,机器人设计生产能力进一步得到加强,尤其当机器人的生产与柔性化制造系统和柔性制造单元相结合,从而改变目前机械制造的人工操作状态,提高了生产效率。就目前来看,总的来说现代机器人有以下几个发展趋势: 1)提高运动速度和运动精度,减少重量和占用空间,加速机器人功能部件的标准化和模块化,将机器人的各个机械模块、控制模块、检测模块组成结构不同的机器人; 2)开发各种新型结构用于不同类型的场合,如开发微动机构用以保证精度;开发多关节多 自由度的手臂和手指;开发各类行走机器人,以适应不同的场合; 3)研制各类传感器及检测元器件,如,触觉、视觉、听觉、味觉、和测距传感器等,用传感器获得工作 对象周围的外界环境信息、位置信息、状态信息以完成模式识别、状态检测。并采用专家系统进行问题求解、 动作规划,同时,越来越多的系统采用微机进行控制。 、论文(设计)研究的内容
手工活动教案
手工活动教案 学情分析农村学生的动手能力较差,鉴于这一点,课程设计旨在培养孩子的兴趣和他们的动手的能力 教学 内容 学前教育(纪律、要求与准备) 教学目标通过活动使学生了解创意手工,及其基本知识。使学生提高学习的兴趣。 核心 素养 培养学生的思维能力和动手能力 指导过程及活动情况记录1、课前准备,要求。 2、了解手工制作 手工制作有许多的形式如:折纸、剪纸、染纸、中国结等等。 它是培养学生动手、动脑,启发学生创造性思维的重要手段。 美术手工制作的特点有三个: 1、强调手眼脑结合的实践,操作性强; 2、设计范围广:它包括手工折纸、剪贴、泥塑、立体构成、陶艺、编结以及各种民间美术工艺制作等; 3、选材来源于生活(纸、绳、布、棉花、线、塑料、陶泥、易拉罐、树枝……)。 3、学习各种工具和材料的基本使用方法 牛奶盒、饮料瓶、一次性餐具、废纸箱…… 彩笔、剪刀、胶水、竹签、铁丝 剪、折、粘、捏 4、作品欣赏。
手工活动教案 学情分析农村学生的动手能力较差,鉴于这一点,课程设计旨在培养孩子的兴趣和他们的动手的能力 教学 内容 一次性纸杯制作螃蟹挂饰 教学目标通过本次活动,使学生学会用一次性纸杯制作螃蟹挂饰,锻炼手指的灵活性,并体味到动手实践的乐趣。 核心 素养 培养学生的思维能力和动手能力 用纸杯手工制作螃蟹吧,这回这个螃蟹立体感更强哦! 纸杯做手工折螃蟹材料:一次性纸杯、彩色手工纸、瓶盖儿、胶棒、 剪刀等 纸杯动物制作步骤
指导 过程 及 活动 情况 记录螃蟹手工制作要点: 1、把两张蓝色手工纸折叠成蝴蝶结,然后粘贴在用黄色手工纸装饰好的纸杯的外壁 上。 2、在蓝色彩纸上剪下8个长3厘米、宽1厘米的纸条,在灰白色手工纸上剪下2个 长5厘米、宽2厘米的纸条,并分别将这些纸条做成纸卷。在红色手工纸上剪下螃蟹的 大“钳子”状纸片,粘贴在灰白色的纸卷上;在灰白色手工纸上剪下螃蟹腿上的小“钩 子”状纸片,粘贴在天蓝色的纸卷上。 3、将蓝色和黑色的圆形纸片贴在瓶盖儿上,做成螃蟹的眼睛。将黄色纸卷与瓶盖儿 粘好。 4、将螃蟹的眼睛和腿粘在纸杯上。用彩笔在杯壁上画上螃蟹的嘴。一只纸杯螃蟹就 做好了。 手工课 学情分析农村学生的动手能力较差,鉴于这一点,课程设计旨在培养孩子的兴趣和他们的动手的能力 教学 内容 一次性纸杯改造成家居卡哇依娃娃 教学目标通过本次活动,使学生学会一次性纸杯改造成家居卡哇依娃娃,锻炼手指的灵活性,并体味到动手实践的乐趣。
“创意之星”模块化机器人实验指导书(实验版)
电子科技大学 “创意之星”模块化机 器人实验 机械电子工程学院 2010 年3 月
目录 实验一MULTIFLEX控制卡编程实验 (1) 实验二多自由度串联式机械手 (10) 实验三简易四足机器人 (15) 实验四轮式机器人运动控制实验 (19) 实验五机器人传感系统实验 (24) 实验六自主避障机器人实验 (27) 实验七追光的机器爬虫 (37) 实验八开放性实验:设计自己的机器人 (48)
实验一MultiFLEX 控制卡编程实验 实验目的 (1)了解MultiFLEX控制卡的基本结构; (2)了解WinAVR+AVRStudio编译环境的使用; (3)了解C 语言环境下编写控制程序,并编译、下载到MultiFLEX 控制器中执行的流程 (4)熟悉关于AVR 单片机的io 口有关的寄存器的概念、作用 (5)理解函数gpio_mode_set(),write_gpio(),read_gpio()的定义,掌握其用法 (6)熟悉并掌握利用2 中的3 个函数控制MultiFLEX 控制卡的16 路IO 口实验环境: UP-MRcommander 控制软件 实验器材: 计算机1台 MultiFLEX 控制卡1块 控制卡电源线1根 串口下载线1根 232电缆1根 USB转232电缆1根 舵机4个 舵机延长线4根 实验步骤 1 WinAVR 以及AVRStudio 软件的安装 首先大家打开实验指导书配套光盘,在“MultiFLEX 控制卡\AVR MCU 开发资料”目录下,打开“WinAVR”文件夹,双击 “WinAVR-20060421-install.exe”完成WinAVR 的安装;然后打开“AVR Studio”文件夹,根据文件夹里面的安装说明进行AVRstudio 的安装,并将其升级到最新版本。 注意:请先安装WinAVR 再安装AVRStudio,这样WinAVR 才能自动嵌入到AVRStudio 中。 2 用3AVRStudio 建立一个工程 首先打开我们刚刚安装好的AVRStudio,会出现如下窗口:
全国青少年科技创新大赛中学生创新发明作品
全国青少年科技创新大赛中学生创新发明作品 “不倒翁式”电脑打字架 司门前中学初一192班 欧阳海珠 辅导教师欧阳明 主题词创新发明不倒翁式打字架 概述在进行电脑文字输入时常会用到稿子打字架。而现在人们使用的打字架主要为“后背支撑式”和“底座螺丝固定式”两种类型。前者占用桌面面积大后者则必须固定在电脑桌上即用一“依托物”作打字架底座螺丝的固定物一旦固定则移动极为不便。电脑桌面本来就很有限再放置此种“后背支撑式”打字架桌面更显狭小。“不倒翁式”电脑打字架正以此为切入点进行逆向思维很好地解决了这两种打字架存在的问题占用面积小稳定性能也不差实为较理想的电脑稿子打字架。 制作方法在计算机日益发展的今天“无纸办公”已不再是人们的梦想人们常常需要将文字输入电脑、查找数据、查找资料等等这就要用到打字架帮助完成这些工作。可市场上销售的电脑打字架多为“后背支撑式”和底座螺丝固定式”两种缺点显而易见而且价格都不算太低。于是我们从日常所见的台历得到启发若在有一定倾斜角度的盒状物底部设置一重物使其重心降低、增强稳定性上置一或二个铁夹了不是可以成为一种新型的“电脑打字架”吗就这样制作“不倒翁式电脑打字架”成了我们的设想。经过几次试验最终找到了用A4纸的包装盒作为打字架的主体构件较为理想从而2 制作出了“不倒翁式电脑打字架”。取A4打印纸包装盒作为“不倒翁式”打字架的主体结构因其高、宽、厚为27.5 X 20 X 6高与宽比例恰当一般打字稿纸多与此接近纸盒侧面对角剪开然后重叠去除重叠后斜边多余的部分其侧面呈直角三角形三角盒子底置一块废弃的日光灯整流器的芯重量为200-300克并用胶带纸固定于底盒底外观略加装饰顶端置一或二夹子。原理和特色1顾名思义“不倒翁式”打字架应用了物理学上的“不倒翁原理”即物体重心降低稳定性加强2应用了数学上三角形的稳定性原理。我们就现有电脑打字架进行逆向思考要缩小打字架的占用面积去除“后背支撑式打字架”后面起着稳定性作用的长长的变角度的支撑部件就必须找到能起稳定性作用的“固定物”。而在底部设置一重物就能达到重心降低、稳定性增强的特性侧面为直角三角形使打字架自身结构稳定性得到加强。“不倒翁式”电脑打字架○1、一改“后背支撑式”打字架占桌面积大的缺点“不倒翁式”打字架占桌面积只为“后背支撑式”打字架的20—25○2、移动十分方便且稳定性好。由于置一重物斜面倾角约为80度所以即便数百页大开本书籍夹在打字架上其重心也会在打字架厚度3 的6CM因而稳定性高。○3、用A4纸包装盒作主体结构及废旧日光灯整流器芯作配重物废物利用环保意识强。问题讨论向商家走访调查以及上网查询得知目前市场上只有“后背支撑式”和“底座螺丝固定式”两类打字架。后者有淘汰出市场之势。目前人们对电脑打字架的研究基本处于停滞状况。以此为切入点进行逆向思维的“不倒翁式”电脑打字架的制作成功无疑是对原有电脑打字架类型的一种重要的、大胆的改进若主体结构的材质改为塑胶等则结构的坚固性定会有极大提升进入批量生产也就成为可能有很大的发展空间若在材质方面改进的同时设计鲜艳、美观的图案作装饰并在打字架正面左或右上端设计一个小电子钟背面设计一个“万年历”则具有一物多用之效备受人们亲睐销路前景定会看好。作为中学生的我们将物理学和数学上所学的知识运用于小发明、小制作中反过来这一发明和创新进一步验证了所学知识的科学性和正确性培养了我们学科学、爱科学的良好素养激发了我们学好基础知识打好基础这美好的明天而努力的热情。 创新小发明制作方法 一、自制羽毛球 准备材料空饮料瓶一只泡沫水果网套两只橡皮筋一根玻璃弹子一只。制作过程4 1.取250毫升空饮料瓶
创客中心建设方案
创客中心建设方案 1.创客教学背景 “创客”源于英文单词Maker,在中文里“创”的含义是:创造、首创、开创、创立,它体现了一种通过行动和实践去发现问题、解决问题的做事原则。“创客”就是坚守创新,持续实践,乐于分享的一群人。 2015年1月28日,********、国务院总理**主持召开国务院常务会议,确定了支持发展“众创空间”的多项政策措施,明确要求“打造良好创业创新生态环境。培育创客文化,让创业创新蔚然成风”。 2015年3月2日,科技部“发展众创空间推进大众创新创业电视电话会议”中进一步强调,推进大众创新创业是新时期科技工作的重要任务,要按照党**、国务院决策部署,努力营造良好的创新创业生态环境,帮助大众创新创业者应用新技术、开发新产品、创造新需求、培育新市场、打造新经济。 要培育创客文化、广泛推广创客教学并不是中国特色的新事物。在过去几年内,美国高校中的学术性创客空间和制造类实验室迅速多了起来。而一些K12(美国基础教育的通称)学校也纷纷尝试在图书馆设立创客空间,或者改装教室以适应基于项目和实践的学**。 其实,对学校而言,开展“创客”教学更像是传统实践教育在数字时代的“升级版”,其精髓是将学生训练成为能独当一面的工程师,提高学生应对复杂应用需求的综合应对能力,加深学生的专业技能。这种人才培养模式陆续在德国、美国的工程院校、技术院校和科技院校中推进,取得了很好的效果。它把教学与实践、教室与工作室、知识获取和能力锻炼、教育文化和企业文化多方面融合,开创一种新型的人才培养模式。可以想象,如果每个科技类专业学生都具有创客精神,将会产生多大的价值空间。
2. 建设创客中心的构想 学生是创客的主体,在学生中间,有少数的创客,一部分很向往,绝大多数表示支持。让创客们继续坚持,让大多数人参与进来,如果没有大力组织推动,就不太可能。简单讲,对学生而言不缺乏积极性和钻研兴趣,缺乏的是氛围和场地。因此,创客中心应该满足学生群体的基本需求。 对于教师日常教学而言,创客可以激发学生的学**主动性,带着项目任务和实践中的目标去学**,能让教学过程体现出更大的趣味性、深度和价值。通过创客中心的建设,产生一种新型的教学方式或文化并延续下来,也是教学改革创新的需求。 对学校而言,创客没有专业的隔阂,创客文化的传播是一个学校整体性的活动。如果将创客教育作为一种人才培养的模式,创客精神就会逐渐发展为学校的一种学**氛围,产生这种氛围就应该是创客中心建设的意义。 从学生、教师、学校三个层次的需求出发,构建一个创客中心的平台,这个平台能给入门级的学生提供一个训练场所,通过项目推动,引导学生动手实践,实现想法,项目可由老师的研究课题延伸,或自由命题,重在领入门和培养兴趣,对于大部分学生,通过开课做普及性的培训,对于拔尖学生,有一个固定的活动场所和团队组织。 3. 建设的目标 第一,明确一个方向:广义的创客没有学科的限制,增加了建设的难度。根据高等理工科类院校的实际情况,机电一体化、机器人技术涵盖了机械、电子、计算机信息等学科技术,覆盖面广、综合性强,具有一定的技术深度,适合全面推广。 第二,确定两个目标:实际创客中心针对的是两个群体,一个是没有创客概念、但有兴趣愿意尝试的,对于这一群体,重点是“领进来”进行“培养基础”,培养之后,有一部分人能坚持,掌握了一定的技能,并已经融入创客文化的,成为另外一个群体,对这个群体的培养应该是着重引导创新。因此,创客中心建设的核心目标应该是“培养基础”和“引导创新”。简称“培养”、“创新”。
第十八届中国青少年机器人竞赛机器人创意比赛主题与规则
第十八届中国青少年机器人竞赛 机器人创意比赛主题与规则 1关于机器人创意比赛 机器人创意比赛是基于每年一度的中国青少年机器人竞赛的主题与规则,组织在校中小学生机器人爱好者,花费6 个月左右的时间,在课题导师或教练员的指导下,在学校、家庭、校外机器人工作室或科技实验室,以个人或小组的方式,进行机器人的创意、设计、编程与制作,最后提交机器人实体作品参加中国青少年机器人竞赛组委会举办的机器人创意比赛活动。 机器人创意比赛对于培养学生学习与综合运用机器人技术、电子信息技术、工程技术,激发创新思维潜能,提高综合设计和制作的能力,培养学生开展科学研究基本素质极为有益。 2主题 2.1主题简介 本届机器人创意比赛主题选定为“家庭服务机器人”,旨在促进青少年了解机器人技术在帮助人类家庭生活方面的作用,并使得同学们在探索机器人知识、技能的过程中树立终身学习的理念。 2.2示例 “家庭服务机器人”的选题相当宽泛,可谓多姿多彩,很适合作为中小学生机器人创意的主题。下面的三个机器人的创意仅仅是为了抛砖引玉,实际应用的机器人远不止这些。 送餐机器人 根据室内房间面积和楼层高度,来安装机器人视觉能识别的航标(此航标安装精度要求很高)。设定餐桌位置及转弯位置,由此形成机器人可识别的电子地图。根据此地图机器人形成自动记忆导航并沿着航标指引方向准确无误地到达餐桌完成送餐任务和返回原点!由于机器人的自动记忆导航功能、视觉校正功能,后台调度控制系统可调度多台机器人同时运行,任务优先,柔性化更好,路径最短,效率更高!语音报菜名及障碍物语音提示内容:可自行录制方言或特色语言,方便添加更改。
图1 送餐机器人 ●烹饪机器人 图2 烹饪机器人 在上海世博会的企业联合馆曾展出一种厨师机器人,它头戴厨师帽名叫“爱可”,这个厨师机器人高约2m,宽1.8m。拉开“爱可”肚子上的拉门,里面有特制的烹调设备,有锅,有自动喷油,喷水和搅拌设备,与之相连接的是一个智能化触摸屏,上面是系统控制界面,根据工作人员事先设定好的特级厨师菜谱,“爱可”一共可以独立烹调24 种中华美食。只要按照程序“下单”,头戴专业厨师帽的机器人便会像模像样地开始准备:将早以“定量”好的主料、配料和调料都放在一个专用盒子里;然后又将它们放入炒锅中,放上油、水,炒锅开始旋转,将食材充分搅拌,然后点火,炒锅不停翻转,就像人炒菜一样,大约三分钟后,一盘佳肴就做呈现在顾客面前。 烹饪机器人的市场前景还是非常的巨大的,随着人们生活水平的提高,再加上社会节奏的加快,为了给自己拥有更多的时间和空间,在中国,厨师机器人将会进入千家万户。 ●草坪修剪机器人
创意之星机器人说明书
创意之星机器人说明书
目录 1结构套件简介 (3) 1.1 结构件概述 (3) 1.2 ConnFLEX连接结构 (3) 1.3 不同版本......................................................................................................... .. (4) 1.4 使用零件3D模型 (6) 2控制器及电源 (7) 2.1 MultiFLEX?2-A VR控制器 (8) 2.2 MultiFLEX?2-PXA270控制器 (9) 2.3 电池和直流电源 (12) 3传感器 (12) 3.1传感器的信号类型及电气规范 (13) 3.2“创意之星”传感器接口 (14) 3.1接近传感器 ...................................................................................................... (16) 3.2 测距传感器 (19) 3.3 声音传感器 (24) 3.4 碰撞传感器 (26) 3.5 倾覆传感器 (26) 3.6 温度传感器 (27) 3.7 光强传感器 (27) 3.8 灰度传感器 (28) 3.9 视觉和语音传感器 (28) 4执行器 (29) 4.1 CDS5516机器人舵机 (29) 4.2 CDS5401大扭矩R/C舵机 (32) 4.3 BDMC1203电机驱动模块 (33) 4.4 Faulhaber大功率减速电机 (34) 5 NorthSTAR 图形化开发环境 (35) 5.1 安装及使用介绍 (35) 5.2 使用流程图开发 (39) 5.3 手写代码开发 (46) 5.4 调试与在线监控 (47) 6 其它部件 (54) 6.1 UP-Debugger 下载调试器 (54) 6.2 WiFi 无线网卡或以太网线缆 (55) 6.3 ZigBee无线模组 (56)
试论中学生科技创新能力不足的教育原因及对策
试论中学生科技创新能力不足的教育原因及对策 宁乡七中胡连冬加强青少年科技后备人才创新能力培养,是关系一个国家和民族前途与命运的战略问题。我国政府实施科教兴国战略和人才强国战略,既是对当今时代特征和未来发展走向的正确认识,也是对经济、社会、科学、文化深刻变革的积极回应。培养学生创造力的教育观已被社会广泛认同,培养学生创新精神,创新意识是基础、是物质准备,我国新一轮教育振兴行动计划,基础教育的新一轮课程改革逐渐进入了全面实验阶段,科学教育受到重视。在新形势下,大力推进科学教育已经成为我国教育改革与发展一件大事。随着新一轮课程改革的深入,对科技教育的认识也在发生变化,以培学生的科学素养为宗旨,学生主体性活动已成为学习的重要方式。 但是现实生活中,随着家庭条件的改善,许多家长也望子成才心切,他们把孩子送去学书、琴、棋、画等之类的课外活动,各类培训部门庭若市,而科技培训活动却冷冷清清,家长们盲目追求各类艺术考级,而忽视了科技意识对孩子全面素质发展的重要性。据美国权威心理学家报告,中国人和犹太人的智商测验分数是全世界各种族中最高的,但如果把所有诺贝尔奖金获得者按其种族分析,华人获奖者在各种族平均数之下,而犹太人是这个平均数的28倍,为什么中国学生的学习成绩比美国孩子好得多,中学生也连连获得国际中学生奥林匹克数理化竞赛金牌,而中国人获诺贝尔奖金的人数这样少呢?中国人12年的中小学学习生活,可以用八个字来概括,就是“死记硬背,
勤学苦练”,在这种教育体制下,人的内在兴趣、动机和自发行为,受到严重的压抑,而这些科技教育的反思与解决方案反思解决却是获得诺贝尔奖(即高水平的发明创造)所必需的;因此,对学生的科技意识的教育,引导他们树立科技知识的创新意识,培养他们的科技发明创造能力在当前是义不容辞的任务。 一、中学生科技创新能力不足的教育原因 1家庭教育存在的问题 从家庭教育层面上说,父母是孩子的第一老师。父母的价值取向对于孩子的成长有着非常重要的关联。现在大人们议论最热烈的话题就是工资、股票、房价、买车和出国旅行,还有送孩子去私立贵族学校接受教育等。于是,家庭所崇尚的理念就潜移默化成了孩子们心理的价值思维,即物质和权力。可是我们许多大人在内心多么希望自己孩子成材,却没有意识到他们的言语,他们的行动,甚至他们的平庸思维给我们的孩子带来了一种潜移默化的教育作用。他们的价值观,他们的个人偏好深深的影响了孩子的能力发展。 2学校教育存在的问题 毫不质疑,学校教育是孩子人生中最重要的教育。尤其是在科技创新能力方面。
创意之星
Inspire your Imagination 创意之星?模块化机器人套件 完全介绍 目录 目录 (1) 1 产品介绍 (2) 1.1 概述和主要特点 (2) 1.2 适用领域 (2) 1.3 创意之星可以构成这些机器人,并且更多! (3) 1.4 产品照片 (6) 2 适合不同用户的三个版本 (7) 2.1 创意之星?机器人套件标准版 (7) 2.2 创意之星?机器人套件入门版 (9) 2.3 创意之星?机器人套件高级版 (11) 3 关键技术介绍 (14) 3.1 创新的结构连接方式 (14) 3.2 MultiFLEX2控制器 (15) 3.3 NorthSTAR软件开发环境 (17) 3.4 机器人舵机 (19) 4 “创意之星”机器人套件组装实例图片 (21)
1 产品介绍 1.1 概述和主要特点 博创科技刚刚推出了最新的UP-InnoSTAR?创意之星?机器人套件产品,以替换上一代“创意之星”产品。该套件是一套用于开展机器人创新实验的模块化机器人套件。分为入门版、标准版和高级版,并有多种配件可选购。 “创意之星?”机器人套件的总体特点类似LEGO Mindstorms?NXT套件,都是具备多种基本“积木”构件的模块化零件套装,包括多种数百个结构零件,一个控制器,多个电机、舵机执行器,多种传感器,以及电池、电缆等附件。用这些“积木”可以搭建出各种发挥想象力的机器人模型来。 所不同的是,“创意之星?”机器人套件主要为创作机器人而设计。具备32位520MHz 的处理器,可处理视频、语音、大容量存储;支持最多254个CDS5500总线式舵机(也可作减速电机使用,指令兼容Robotis的Dynamixel AX12+),并同时具备多个I/O和A/D转换器,以及USB、Wi-Fi等端口。另外,机器人的结构件和创新的连接方式专为创作机器人而设计,连接刚度和结构强度不逊色于铝合金构件,并且连接非常方便。 这样的一套机器人套件可以搭建出无数种机器人构型! “创意之星?”机器人套件配有《构型搭建指南》和《机器人编程实验指导书》等文档,并提供所有构件的3D模型,以及20多种典型构型的装配体3D模型,便于用户学习,并可用于搭建虚拟样机。通过多种典型的机器人构型及其控制系统搭建范例,由浅入深的指引学生搭建机器人结构并学习传感、执行、控制原理和应用,学习机器人控制算法,并发挥创造力,搭建出独特的机器人样机。 “创意之星?”机器人套件具有多种开发方式。初学者可以使用流程图编程软件来给机器人编程;高级用户则可以使用C语言来编程,并可以使用软示波器、3D仿真工具来设计机器人行为,具有极高的透明度和灵活性。 在标准版和高级版两个版本中,还提供MultiFLEX?2控制卡的电路图和参考源程序,以便学生用C语言编写复杂的机器人程序,也可制作自己的机器人控制器。用户可以根据我们提供的技术资料搭建3D虚拟样机、开发自己的机器人控制卡、传感器等等,经由模仿,走向自主创新! 1.2 适用领域 l适合作为大学工科学生的创新实训课程教具和实验器材。 l适合作为大学工科学生的课程设计或者毕业设计平台。 l适合机器人研究者在用于验证理论算法、验证学术论文的结论。 l适合机器人研究者在开发新的机器人之前搭建快速原型,验证原理和可行性。 l适合机器人发烧友用于创作独特的、自己的机器人样机。 l适合初中、高中学生的机器人创作和机器人相关实践活动。