典型光学系统中像差研究的一些问题

典型光学系统中相差研究的一些问题
摘要本文先简单介绍像差理论,包括几种像差及其成因。然后介绍了在典型光学成像系统中的像差研究的一些问题,有基于人眼模型的不同瞳孔直径下眼像差特性、变焦显微系统的像差分析、全息校正望远镜主镜像差原理。最后得出总结。关键词像差理论人眼像差特性变焦显微镜像差望远镜主镜像差
1 引言
像差研究是应用光学中一个很重要的部分。在实际光学系统设计中,如何减少像差对物像质量的影响,得到实际要求范围内的物像是一个很关键的问题。所以在应用光学的学习中对于像差的学习以及了解现在像差研究的一些问题是十分必要的。借此次大作业的机会,我对这方面的问题进行了简单的了解和研究。本文先根据课上内容对像差理论进行简单的介绍和小结,然后介绍了在人眼、望远系统和显微系统中像差研究的一些问题。
2 像差理论简介
在光学系统中实际所成的象与理想象总是有差异,这种成象的差异就称为光学系统的像差。像差分为以下几类:
(1)球差:由光轴上某一物点向镜头发出的单一波长的光线成象后,由于透镜球面上各点的聚光能力不同,它不再会聚到象方的同一点,而是形成一个以光轴为中心的对称的弥散斑,这种象差称为球差,如下图所示。
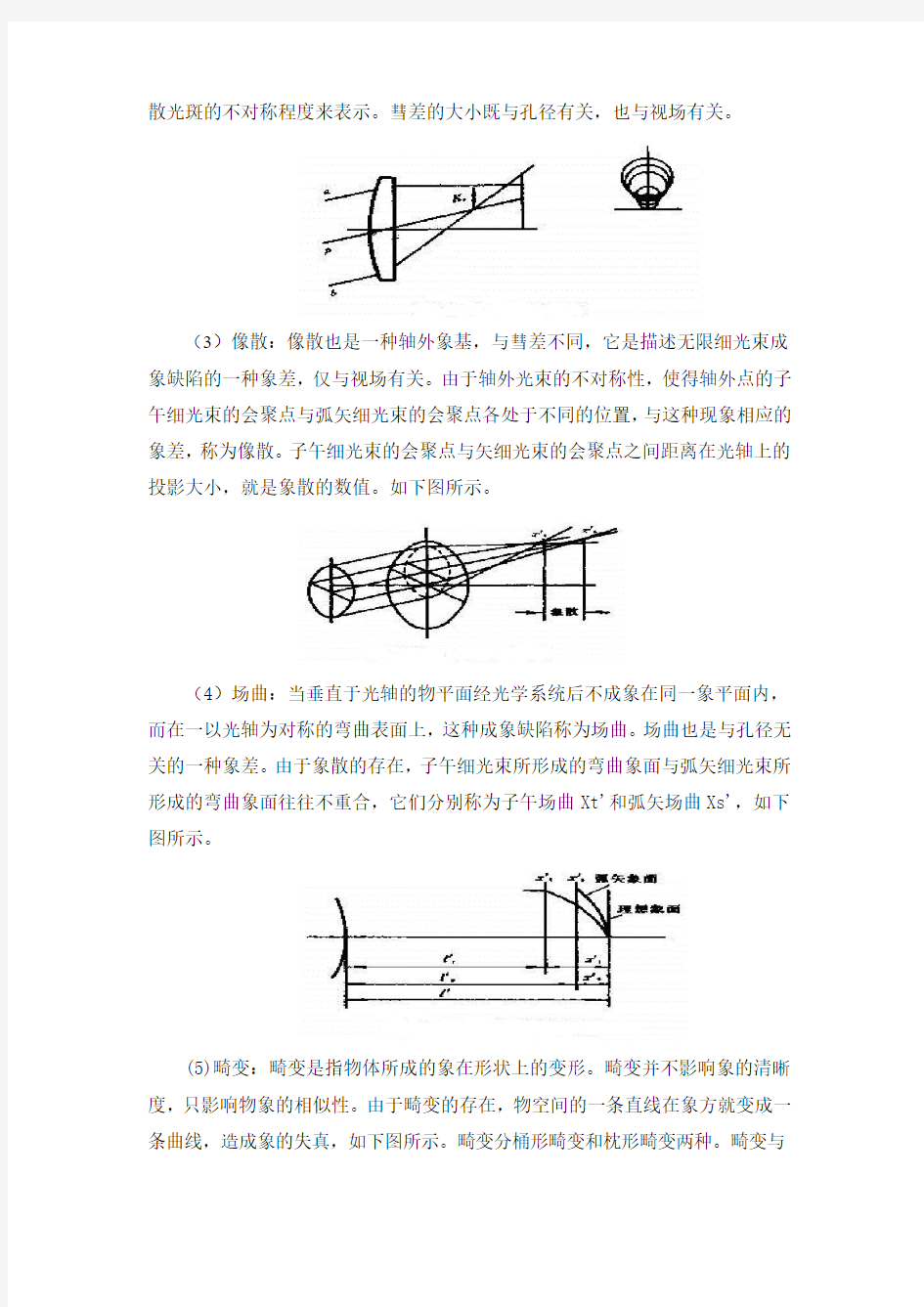
(2)慧差:光轴外的某一物点向镜头发出一束平行光线,经光学系统后,在象平面上会形成不对称的弥散光斑,这种弥散光斑的形状呈彗星形,即由中心到边缘拖着一个由细到粗的尾巴,其首端明亮、清晰,尾端宽大、暗淡、模糊。这种轴外光束引起的象差称为彗差,如下图所示。彗差的大小是以它所形成的弥
散光斑的不对称程度来表示。彗差的大小既与孔径有关,也与视场有关。
(3)像散:像散也是一种轴外象基,与彗差不同,它是描述无限细光束成象缺陷的一种象差,仅与视场有关。由于轴外光束的不对称性,使得轴外点的子午细光束的会聚点与弧矢细光束的会聚点各处于不同的位置,与这种现象相应的象差,称为像散。子午细光束的会聚点与矢细光束的会聚点之间距离在光轴上的投影大小,就是象散的数值。如下图所示。
(4)场曲:当垂直于光轴的物平面经光学系统后不成象在同一象平面内,而在一以光轴为对称的弯曲表面上,这种成象缺陷称为场曲。场曲也是与孔径无关的一种象差。由于象散的存在,子午细光束所形成的弯曲象面与弧矢细光束所形成的弯曲象面往往不重合,它们分别称为子午场曲Xt'和弧矢场曲Xs',如下图所示。
(5)畸变:畸变是指物体所成的象在形状上的变形。畸变并不影响象的清晰度,只影响物象的相似性。由于畸变的存在,物空间的一条直线在象方就变成一条曲线,造成象的失真,如下图所示。畸变分桶形畸变和枕形畸变两种。畸变与
相对孔径无关,仅与镜头的视场有关。
(6)色差:在照相系统中,镜头总是用白光成象。而白光是由各种不同波长的单色光组成的,而不同波长的单色光在同一光学介质中具有不同的折射率,因此在同一焦面上其会聚点会不同,这种现象称为色差。
3 基于人眼模型的不同瞳孔直径下眼像差特性
3.1 离焦
图 3.1a 给出了两种眼模型在不同瞳孔直径下的离焦量值的变化曲线图,图中实线表示的是L 眼模型在不同瞳孔直径下的离焦量变化情况,虚线表示的是G 眼模型在不同瞳孔下的离焦量变化情况。图中横坐标表示的是瞳孔直径的变化,纵坐标表示的是波前像差Zernike 的第四项系数Z4,在波前像差Zernike 前35 项系数中Z4 表示的是光学系统的离焦量。在图 3.2.1a 中对比两条曲线可以看出,随着瞳孔直径的变化,L眼模型离焦量的变化曲线要比G 眼模型的变化曲线平缓很多,当瞳孔直径从2mm 变化到8mm 时,L 眼模型的离焦量从-0.003 增长到 1.934,而G 眼模型的离焦量从-0.334 增长到9.217。对G 眼模型来说,当瞳孔直径为2mm 时,G 眼模型的离焦量值为负值,且接近于零,当瞳孔直径在2mm-5mm 之间时,G 眼模型的离焦量值变化不是很大,当瞳孔直径大于5mm 时,G 眼模型的离焦量值呈现大幅度的上升变化。在图 3.2.1a
中的L眼模型,随着瞳孔直径的变化,其离焦量变化曲线很平缓,变化不是很明显,为了更容易看出L 眼模型随着瞳孔直径变化呈现出的变化趋势,在图3.2.1b 中将L 眼模型离焦量的变化曲线图给予了放大。在图3.2.1b 可以清楚地看到,当瞳孔直径为2mm 时,L 眼模型的离焦量值也是很小,随着瞳孔直径上升至5mm 时,其离焦量值也仅为0.26,当瞳孔直径接着再变大时,L 眼模型的离焦量值呈现了相比之前较大幅度的上升。对比这两条曲线可以看出,随着瞳孔直径的变化,虽然两条曲线的变化幅度相差很大,但是这两种眼模型的离焦量变化趋势是大致相同的,均在瞳孔直径为2mm-5mm之间变化时,两种眼模型的离焦量均变化不大,当瞳孔直径从6mm 继续增大时,两种眼模型的离焦量均呈现大幅度上升的趋势。
图 3.1a 两种眼模型在不同瞳孔直径下的离焦量变化曲线图
图 3.1b L 眼模型在不同瞳孔直径下的离焦量变化曲线图
3.2 球差
图3.2 给出了两种眼模型在不同瞳孔直径下的球差值的变化曲线图,图中实线表示的是L 眼模型在不同瞳孔直径下球差的变化情况,虚线表示的是G
眼模型在不同瞳孔下球差的变化情况。
图 3.2 两种眼模型在不同瞳孔直径下的球差曲线图图
从图中可以看出,随着瞳孔直径的逐渐增加,除了L 眼模型的球差变化幅度稍微小于G 眼模型的球差变化幅度之外,两种眼模型的球差变化情况几乎是相同的,均随着瞳孔直径的变化而增大,且增加幅度也越来越大,具体表现为在瞳孔直径为2mm-5mm 时,两种眼模型的球差变化量均不是很大,当瞳孔直径大于6mm 时,球差增长幅度较大。在瞳孔直径为2mm 时,即人眼在亮度较强环境下,两种眼模型的球差值均很小,接近于0mm;当处于正常环境下,两种眼模型的球差值均在0.02mm 之下;当瞳孔直径为8mm 时,人眼处于亮度较暗的环境之下的情况下时,两种眼模型的球差值略有不同,G 眼模型的球差值较大为0.185mm,L 眼模型的球差值稍小些,为0.141mm。
3.3 人眼波前像差的 PV 值
图 3.3a 给出了两种眼模型在不同瞳孔直径下波前像差的PV 值的变化曲线图,其中实线是L 眼模型波前像差的PV 值在不同瞳孔直径下的变化曲线
图,虚线表示的是G 眼模型波前像差的PV 值在不同瞳孔直径下的曲线图。
图 3.3a 两种眼模型在不同瞳孔直径下的PV 值曲线图
对比这两条PV 值曲线图,我们可以看出,在不同瞳孔直径下,G 眼模型波前像差的PV 值均大于L 眼模型波前像差的PV 值,并且随着瞳孔直径的增大,两种眼模型的PV 值相差越大,例如,当瞳孔直径为2mm 时,G 眼模型的PV 值为 1.16waves,而L眼模型的PV 值为0.01waves;当瞳孔直径为4mm 时,G 眼模型的PV 值为2.57waves,而L 眼模型的PV 值为0.33waves;当瞳孔直径为8mm 时,G 眼模型的PV 值为36.64waves,而L 眼模型的PV 值为6.68waves。
图 3.3b 单独给出了L 眼模型的波前像差PV 值在不同瞳孔直径下的曲线图。结合图 3.2.3a 中的G 眼模型的PV 值曲线图可以看出,在瞳孔直径为
2mm-8mm 时,两种眼模型的波前像差PV 值变化都是比较缓慢的,在瞳孔直径大于6mm 时,两种眼模型的波前像差的PV 值变化幅度均明显增大。概括来说,随着瞳孔直径的增大,两种眼模型的波前像差PV 值均变大,并且变化
幅度在瞳孔直径为6mm 之后越来越大。
图 3.3b L 眼模型在不同瞳孔直径下的 PV 值曲线图
3.4 人眼波前像差的 RMS 值
而L 眼模型的rms 值为1.981waves。图3.2.4a 给出了两种眼模型在不同瞳孔直径下波前像差的rms 值的变化曲线图,图中实线表示的是L 眼模型波前像差的rms 值在不同瞳孔直径下的变化曲线图,虚线表示的是G 眼模型波前像差的rms 值在不同瞳孔直径下的曲线图。从图中可以看出,在不同瞳孔直径下,G 眼模型波前像差的rms 值比L 眼模型波前像差的rms 值要大的多,例如,在瞳孔直径为2mm 时,G 眼模型的rms 值是0.332waves,而L 眼模型的rms值是0.003waves;当瞳孔直径为4mm 时,G 眼模型的rms 值为0.772waves,而L 眼模型的rms值为0.096waves;当瞳孔直径为8mm时,G眼
模型的rms值为10.179waves,而L 眼模型的rms 值为 1.981waves。
图 3.4a G 眼模型在不同瞳孔直径下的rms 值曲线图
图 3.4b 单独给出了L 眼模型在不同瞳孔直径下的波前像差rms 曲线图,对比图3.4a 中的G 眼模型波前像差rms 曲线图可以看出,G 眼模型和L 眼模型的rms 值随着瞳孔直径的逐渐增大变化情况大致相同,当瞳孔直径从2mm 逐渐增大到5mm 时,rms曲线较为平稳,变化不大,当瞳孔直径从6mm 增大
到8mm 时,rms 值增长幅度较大。
图 3.4b L 眼模型在不同瞳孔直径下的 rms 值曲线图
4 变焦显微系统的像差分析
随着变焦距光学系统的成像质量逐渐接近并达到定焦距光学系统的水平,变焦距光学系统的应用领域不断扩大。它的应用不再局限于最初的生物显微镜,而是已经延伸到了各个行业,包括电子工业、半导体工业、IT 产业、以及植物学、生物学、病理学、细菌学等;具体应用如电子产业的IC 电路检验,液晶屏检验;运输,金属行业的涂饰表面,金属表面检验;材料,化学行业的玻璃纤维检验以及其他一些行业如食品,药物的检验,植物,生物观察等等。
本节将重点介绍变焦显微系统的像差分析。
4.1 研究内容简介
像差分析基于ZEMAX 光学分析软件,利用ZEMAX 的MTF 曲线、SPT 点列图、RAY 曲线、OPD 曲线、场曲、畸变曲线等,完成变焦显微镜系统像差的全面分析。
显微物镜中有消色差物镜,半复消色差物镜和复消色差物镜。消色差物镜是指对两条谱线校正轴向色差的物镜;半复消色差物镜的二级光谱比消色差物镜小;复消色差物镜是指对三条谱线校正轴向色差的物镜。无论是哪一种物镜,七
种像差反映在ZEMAX 中表现为同一分辨率下MTF 值的大小,Ray Fan曲线的形状,点列图的尺寸以及场曲和畸变的大小。
4.2 MTF 曲线
MTF 表示各种不同频率的正弦强度分布函数经光学系统成像后,其对比度(振幅)的衰减程度。当某一频率的对比度下降到零时,说明该频率的光强已无亮度变化,即频率被截止。横坐标为频率,纵坐标为归一化后的对比度(或者叫反差),反差就是像面最亮和最暗处的差异程度。
MTF 曲线和坐标轴所围的面积越大,表明光学系统所传递的信息量越多,光学系统的成像质量越好,图像越清晰。MTF 曲线中除了不包含光学系统的
场曲畸变信息以外,MTF 值越大,光学镜头再现还原的能力就越强。
在MTF 图中,MTF 值是一个界于0 到 1 之间的数值。1.0 表示百分之百完全分辨,0.6 表示只有六成的分辨能力,此时白色线条略带灰色,黑色线条也不是深黑色。0.0 表示完全无法分辨,所呈现出来的只是一片灰色。水平坐标表示镜头所能分辨的线对数。因此,MTF 值是用来评估不同线频时黑白线条的反差。例如,当人们在读白纸黑字时,要求的最低反差是20%,低于20%读起来就比较吃力。横坐标在高频时表示镜头分辨细节的能力,低频时表示镜头再现整体轮廓的能力。
望远物镜,显微物镜均为小像差系统,传递函数值高,设计时应尽可能接近衍射极限;投影物镜,照相物镜为大像差系统,传递函数值较小且离衍射极限很远,计算传递函数值时应设置最高截止频率。
通常用特征频率的传递函数值来评价光学系统的像质。以 5 或10 线对来评价镜头的对比度性能时,此频率的MTF 值纵然只有2~3 %的差异,人眼也可轻易分辨,所以这是一个重要的基本频率。好的镜头在频率为5lp/mm,小光圈时子午及弧矢方向MTF 值可以达到95%。低于90%表示像质较差。
以40 线对来评价镜头的清晰度性能。40lp/mm 代表一个镜头可以分辨多细的物体(譬如一根毛发)。此频率下MTF 纵然有10 %差异,人眼也不太能分辨其差别。
有了上面的分析以后,得到变焦显微镜的不同焦距位置的MTF 曲线。如图4-1中(a)、(b)、(c)、(d)分别代表了从长焦到短焦的四个焦距位置的MTF 曲线。
图4-1 变焦显微镜不同焦距位置MTF 曲线图
从以上的MTF 曲线中可以得到:
1. 镜头在频率为5lp/mm 时,系统向短焦位置变化的过程中,MTF 值从均在95%以上。
2. 频率为40lp/mm,在长焦时对应的MTF 值在20%以上,短焦时MTF 值在60%以上,说明系统的综合像质良好。
3. 光学系统的截止频率值在四个焦距位置分别为208 lp/mm,299 lp/mm,369 lp/mm,390 lp/mm。
4. 随着活动组份的移动,系统向短焦方向变化,放大倍率逐渐增大,不同视场下MTF 值逐渐向衍射极限值靠近。
5. 往短焦变化过程中,MTF 曲线在衍射极限值时对应的MTF 值从0.1~0.2 逐渐增大到0.2~0.3 之间。
6. 随着焦距减小,不同视场下的MTF 曲线以及同一视场下的子午和弧矢方向的MTF 曲线趋向一致,说明往高倍变化的过程中,随着视场变小,变焦显微镜物方视场逐渐变得均匀,成像质量趋于良好。
7. 由MTF 曲线可以发现,通常子午方向较弧矢方向MTF 值来得差,在镜头优化时,可以用较高的弧矢方向MTF 值来补偿子午方向做某种程度的像差补偿。
4.2 Ray Fan 曲线
图4-2 变焦显微镜不同焦距位置RAY FAN 曲线图
Ray Fan 曲线能够表示光学系统的综合像差。横坐标表示光学系统的入瞳位置,归一化为-1 到+1 之间,0 位置对应的就是光轴穿过入瞳中心与像面的交点。纵坐标则是其他光线与主光线在像面上的相对位置变化。
由于在计算光路时通常考虑子午面和弧矢面上的光线,因此同一个视场下的同一个波长编号对应两条Ray Fan 曲线。实际上,Ray Fan 曲线是考虑了点列图子午和弧矢方向上的像点分布情况,是点列图的一个特例。
理想光学系统的Ray Fan 曲线是在横轴上,然而由于像差的存在,会出现一定形状的曲线。比如,S 形状的曲线表示这个系统有球差,多个S 形状的曲线表示光学系统有高级球差。
图4-2 是不同焦距位置RAY FAN 曲线图。从图中可以看出,零视场较其他视场曲线平坦,低倍较高倍曲线平坦。由于球差为轴向像差,前固定组使用对称型物镜,从Ray Fan 曲线形状可以看出,高倍时系统球差相对比来说较为严重。
4.3 Spot Diagram 点列图
图4-3 变焦显微镜不同焦距位置点列图
下表是四个焦距位置,图3-3 光学系统在不同视场下,点列图半径值。
表格3- 5 不同焦距位置点列图半径/ μm
由一点发出的许多光线经光学系统后,因像差使其与像面的交点不再集中于同一点,而形成了一个散布在一定范围的弥散图形,称为点列图。同一视场下不同色斑的分开程度表明色差的影响程度,因而,点列图半径是光学系统的像质综合评价指标。
中心视场较边缘视场的像斑半径小,短焦距位置较长焦距位置的像斑半径小。随着系统往短焦距的方向变化,不同视场下的像斑半径都逐渐变小,物面的分辨率逐渐接近系统的衍射极限,分辨能力逐渐提高。
4.4 场曲和畸变
图3- 7 变焦显微镜不同焦距位置场曲畸变曲线图
实际像面偏离高斯像面的距离称为像面弯曲,简称场曲。子午像面相对于高斯像面的偏离量称为子午场曲,弧矢像面相对于高斯像面的偏离量称为弧矢场曲。低倍时的子午场曲和弧矢场曲都较为严重,且子午和弧矢像面的偏离量较大。高倍时像面的场曲减小,子午弧矢像面趋于重合。
理想光学系统中,一对共轭的物像平面上的物像垂轴放大率是常数,也就是说,物像平面上的各部分的垂轴放大率相等。实际光学系统中,视场较小时,近似接近理想情况,当视场较大时,像平面上不同部分的垂轴放大率随着视场大小而变,即物像之间失去相似性,称这种像变形的成像缺陷为畸变。
目视光学仪器中,畸变可允许到4%。如若需要用来测量的光学系统则对畸变的要求很高。本论文的摄影变焦显微镜,主要是用于观察成像,因而可以放宽畸变的要求。摄影变焦显微光学系统中畸变小于±2%,基本上符合要求。
5 全息校正望远镜主镜像差原理
利用全息技术校正望远镜光学误差和系统像差的方法是由俄罗斯科学家Denisyuk 和Soskin 于1971 年提出的,其实质是利用激光全息技术获得大像差波面的位相共轭波面,从而补偿、校正原始大像差波面,实现无像差光学成像。以下分别对折射式望远镜主镜和反射式望远镜主镜的像差校正原理进行分析研究。
5.1 折射式望远镜
全息技术用于校正折射式望远镜主镜像差原理如图5-1 所示。
图5-1 折射式望远镜主镜像差的全息校正原理
图中用一个理想的光学元件和一块像差板,表示折射望远镜中不完善的物镜,如图5-1(a)所示。无穷远处一束衍射受限的平行光入射至这一有像差的物镜上,其会聚光束经望远镜目镜准直照射到全息干板H上。另一束衍射受限的参考光束以一定的角度入射至全息记录干板H上,若这两光束满足干涉要求,则两光束产生干涉,由此在全息记录干板H上得到有像差的光束与衍射受限参考光束相干涉的全息图,如果适当调节望远镜的物镜和目镜的焦距大小,则可用来调整对无穷远处物体所成像的大小。如果用原照明光波去再现此全息图,如图5-1(b)所示,则可再现出原衍射受限的无像差的参考光束。如果用远处的物光波替代原照明光波去再现此全息图时,如图5-1(c)所示,从而再现出衍射受限参考光束。由于在再现光束中保留着原始的物光波信息,因而可形成远距离物体
的无像差像。
5.2 反射式望远镜
反射望远镜在天文观测中的应用已十分广泛,由于反射望远镜光学性能的重要特点是没有色差,也不存在二级光谱,且对于反射镜的材料,只要求它的膨胀系数较小、应力较小和便于磨制。因此,它与折射系统相比,可以使用大口径材料,也可以使用多镜面拼镶技术等。由于反射镜的造价要比透镜低的多,目前设计和建造的大口径望远镜都是采用的反射系统。因此对反射式望远镜主镜像差校正的研究尤为重要。
全息技术用于校正反射式望远镜主镜像差原理如图5-2 所示。一束相干平行光入射至具有大像差的球面反射镜M,其反射光经平面反射镜后由透镜L准直为平行光束垂直照射到全息干板H上,全息干板位于M经次级光学元件L所成像的像面上,参考光束为衍射受限的单色平行光束,与全息记录干板H法线方向的夹角为θ。设透镜L的焦距为f,若M至L的距离p,L至全息记录干板H 的距离q,它们满足如下关系:。这样全息干板H所记录的是一幅球面反射镜M的像面全息图。由此得到像差光束与衍射受限参考光束相干涉的全息图,如5-2(a)所示。该全息图的再现如图2.6(b)所示,来自远距离物体的光由具像差的望远镜主镜M收集,经次级光学元件L后照射至全息记录干版上,从而再现出衍射受限的参考光束。由于在再现光束中保留着原始的光强调制,因而可形成远距离物体的无像差像。
图5-2 反射式望远镜主镜像差校正原理
设照射到全息干板 H 上的物光束和平行参考光束的复振幅光场分布分别为:
exp()m m O O j φ= (2.20)
0e x p (c o s )R R j k z θ
= (2.21) 其中m O 、0R 分别为物光波和参考光波的振幅;m φ为由球面反射镜 M 的面形误差引起的位相漂移;k=2π/λ,λ为记录光波长,θ为参考光束与全息干板 H 法线方向的夹角。则入射至全息记录干板 H 上总的复振幅光场分布为:
U O R =+ (2.22)
因此,全息干板 H 的光强度分布为:
222
**I O R O R OR O R =+=+++ (2.23)
在线性记录和处理的条件下,全息图的振幅透过率与曝光光强成正比。若略去比例常数,可将全息图的振幅透过率写为:
22
**(,)H t x y O R OR O R =+++ (2.24) 经显影和定影处理后将全息图严格复位至原记录位置,用远距离物光束照明再现全息图。设远距离物光束的光场分布为:
00=exp()j ττφ (2.25)
则透过全息图 H 后的复振幅光场分布为:
222
'2*0(,)()H U t x y O O R O R O R ττττ==+++ (2.26) 其中第三项衍射光波再现了原参考光波的光场,不再含有由球面反射主镜 M 的面形误差引起的位相因子。若原参考光束为衍射受限的平行光束,则该包含了全息校正板和大面形误差及系统像差的望远系统具有衍射受限成像性能,可用于对远距离物体的无像差成像。
6 总结
本文介绍了三个典型光学系统中,即人眼、显微系统、望远系统中相差研究的三个问题,分别是基于人眼模型的不同瞳孔直径下眼像差特性、变焦显微系统的像差分析、全息校正望远镜主镜像差原理。在此次的大作业机会中,我对像差在实际光学系统设计中的问题有了一个了解,同时对像差有了一个新的认识。希望老师对我的论文多多进行指导。
7 参考文献
[1] 张以谟,应用光学,电子工业出版社,2012年
[2] 王峰林,基于眼模型的人眼像差特性研究,吉林大学,2012年
[3] 林明发,变焦显微镜设计,合肥工业大学,2009年
[4] 朱爱敏,全息校正望远镜主镜像差的机理及实验研究,苏州大学,2008年
RLE-ME01-光学系统像差测量实验-实验讲义
光学系统像差测量实验 RLE-ME01 实 验 讲 义 版本:2012 发布日期:2012年8月
前言 实际光学系统与理想光学系统成像的差异称为像差。光学系统成像的差异是《工程光学》课程重要章节,也是教学的难点章节,针对此知识点的教学实验产品匮乏。RealLight?开发的像差测量实验采用专门设计的像差镜头,像差现象清晰;涉及知识点紧贴像差理论的重点内容,是学生掌握像差理论的非常理想的教学实验系统。
目录 1.光学系统像差的计算机模拟 1.1.引言---------------------------------------------1 1.2.实验目的-----------------------------------------1 1.3.实验原理-----------------------------------------1 1.4.实验仪器-----------------------------------------4 1.5.实验步骤-----------------------------------------4 1.6.思考题-------------------------------------------5 2. 平行光管的调节使用及位置色差的测量 2.1.引言---------------------------------------------6 2.2.实验目的-----------------------------------------6 2.3.实验原理-----------------------------------------6 2.4.实验仪器-----------------------------------------7 2.5.实验步骤-----------------------------------------8 2.6.实验数据处理-------------------------------------9 2.7.思考题-------------------------------------------9 3. 星点法观测光学系统单色像差 3.1.引言---------------------------------------------10 3.2.实验目的-----------------------------------------10 3.3.实验原理-----------------------------------------10
平面对称光学系统像差理论的扩展
第17卷第12期2009年12月 光学精密工程 OpticsandPrecisionEngineering Vol-17No:12 Dec.2009 文章编号1004—924X(2009)12-2975—08 平面对称光学系统像差理论的扩展 吕丽军,石亮 (上海大学精密机械系,上海200072) 摘要:将平面对称光栅系统的波像差理论扩展于平面对称折射光学系统,指出在光学系统像差问题上,反射光学系统可以看成是折射光学系统在物像空间折射率相同情况下的特例。首先,把波像差表达式扩展于光线斜入射下平面对称折射光学系统;然后,根据折射光学系统的要求,对光栅像差的推导过程进行相应的修正,最终,导出了任意方位像平面上的像差。结果表明,导出的像差表达式同时适用于反射、衍射、折射3种光学系统的像差计算。与光线追迹解析法导出的像差系数进行了解析比较,并分别应用提出的像差表达式和光线追迹程序Zernax对一透镜光学系统在斜入射角为50。下的光束进行成像数值模拟,两种方法都验证了提出理论的正确性。 美键词:波像差;平面舛称光学系统;透镜;光学设计 中图分类号:0435.2;TH703文献标识码:A Generalizationofaberrationtheoryofplane-symmetricopticalsystems LULi-jun,SHILiang (DepartmentofPrecisionMechanicalEngineering,ShanghaiUniversity,Shanghai200072,China) Abstract:Theaberrationtheoryofplane-symmetricgratingsystemsisextendedtotheplane-symmet—ricrefractiveopticalsystemsinthispaper.Itispointedoutthat,asfarastheopticalaberrationiscon—cerned,thereflectiveopticalsystemcanberegardedasaspecialcaseofrefractiveonewhentherefrac—tiveindexesofanobjectandanimagespacesareidentical.Firstly,thewaveaberrationsaregeneral—izedtotherefractiveplane-symmetricsystems。Thenaccordingtotherequirementsofrefractivesys—tern。theaberrationismodifiedtoderivetheaberrationformulaeofanarbitrarilyimageplane.Analy—sisresultsshowthattheaberrationformulaecanbeusedtoexpressasetofformulaeforreflective,diffractiveandrefractiveopticalsystems.Theaberrationcoefficientsareprovedtobeidenticaltothosederivedfromtheanalyticalformulaeoftheray-tracingspotdiagram.Moreover,theimprovedformulaeandZemaxray-tracingcalculationsareusedtoimagenumericallyforalenssystemwithalightbeamatanobliqueangleof50。,andboththeresultsvalidatetheproposedaberrationtheory. Keywords:waveaberration;plane-symmetricopticalsystem;lens;opticaldesign ,, 收稿日期:2008—12?15;修订日期:2009—02-23. 基金项目:国家自然科学基金资助项目(No.10775095);上海市教委创新基金资助项目(No.08YZl4) 万方数据
第一讲作业
第一章光学系统像质评价作业: 检验实际光学系统成像质量的常用方法有哪几种 分辨率检验、星点检验、波象差检测、光学传递函数检测 在光学系统设计阶段评价成像质量的方法有哪几种 ①几何光学方法:几何像差,波像差,点列图,几何光学传递函数 ②物理光学方法:点扩散函数,相对中心光强,物理光学传递函数什么是色差光学系统中色差有哪几种色差如何校正 色差:对白光成像的光学系统,由于材料对不同波长的色光折射率不同,使各色光线具有不同的成像位置和倍率。轴向色差:不同颜色像点沿光轴方向的位置之差;垂轴色差:不同颜色像对应大小之差。色差校正:①采用不同色散不同折射率玻璃的组合;②采用折衍混合的技术;③采用反射镜。 共轴光学系统轴上点有哪几种像差 球差、位置色差。 什么是光学系统的像差存在像差时对系统成像会有什么影响 实际光学系统不能用近轴光成像,实际光学系统有一定的角度,球面系统不能成理想像,这就是光学系统的像差。它会影响成像清晰度还有形变。
请列举出,在光学系统中的曲面方程里,基准二次曲面系数K的值与面型的关系。 双曲面:K<0;抛物面K=0;椭球面0
光学系统像差理论综合实验.doc
第五节光学系统像差实验 一、引言 如果成像系统是理想光学系统 , 则同一物点发出的所有光线通过系统以后 , 应该聚焦在理想像面上的同一点 , 且高度同理想像高一致。但实际光学系统成像不可能完全符合理想 , 物点光线通过光学系统后在像空间形成具有复杂几何结构的像散光束 , 该像散光束的位置和结构通常用几何像差来描述。 二、实验目的 掌握各种几何像差产生的条件及其基本规律,观察各种像差现象。 三、基本原理 光学系统所成实际像与理想像的差异称为像差,只有在近轴区且以单色光所 成像之像才是完善的(此时视场趋近于 0,孔径趋近于 0)。但实际的光学系统均需对有一定大小的物体以一定的宽光束进行成像,故此时的像已不具备理想成像的条件及特性,即像并不完善。可见,像差是由球面本身的特性所决定的,即使透镜的折射率非常均匀,球面加工的非常完美,像差仍会存在。 几何像差主要有七种:球差、彗差、像散、场曲、畸变、位置色差及倍率色差。前五种为单色像差,后二种为色差。 1.球差 轴上点发出的同心光束经光学系统后,不再是同心光束,不同入射高度的光线交光轴于不同位置,相对近轴像点(理想像点)有不同程度的偏离,这种偏离称为轴向球差,简称球差( L )。如图1-1所示。 图 1-1 轴上点球差 2.慧差 彗差是轴外像差之一,它体现的是轴外物点发出的宽光束经系统成像后的失对称情况,彗差既与孔径相关又与视场相关。若系统存在较大彗差,则将导致轴 外像点成为彗星状的弥散斑,影响轴外像点的清晰程度。如图1-2 所示。
图1-2 慧差 3.像散 像散用偏离光轴较大的物点发出的邻近主光线的细光束经光学系统后,其子午焦线与弧矢焦线间的轴向距离表示: x ts x t x s 式中, x t , x s分别表示子午焦线至理想像面的距离及弧矢焦线会得到不同形状的 物至理想像面的距离,如图1-3 所示。 图1-3 像散 当系统存在像散时,不同的像面位置会得到不同形状的物点像。若光学系统对直线成像,由于像散的存在其成像质量与直线的方向有关。例如,若直线在子午面内其子午像是弥散的,而弧矢像是清晰的;若直线在弧矢面内,其弧矢像是弥散的而子午像是清晰的;若直线既不在子午面内也不在弧矢面内,则其子午像和弧矢像均不清晰,故而影响轴外像点的成像清晰度。 4.场曲 使垂直光轴的物平面成曲面像的象差称为场曲。如图1-4 所示。 子午细光束的交点沿光轴方向到高斯像面的距离称为细光束的子午场曲;弧矢细光束的交点沿光轴方向到高斯像面的距离称为细光束的弧矢场曲。而且即使像散消失了(即子午像面与弧矢像面相重合),则场曲依旧存在(像面是弯曲的)。 场曲是视场的函数,随着视场的变化而变化。当系统存在较大场曲时,就不
光学系统的象差
象差:试剂光学系统所成的象和近轴光学系统所成德象的差异。 光学系统对单色光成象时产生单色象差,分为五类:球面象差(球差),慧形象差(慧差),象散差(象散),象面弯曲(场曲),畸变。对白光成象时,光学系统除对白光中的各单色光成分有单色象差外,还产生两种色差:轴向色差和垂轴色差(亦称倍率色差)。 球差使得影像中心成柔焦状,没有最清晰点出现;慧差使得影像周围成柔焦状,没有最清晰点出现;像散使得影像周围径向和切向焦点分离,不能同时和焦;像面弯曲使得影像叫平面呈弯曲状,使得中心和边缘不能同时和焦;畸变使得影像变形,周围直线变成曲线;置色差使得影像中心光点变成色环;倍率色差使得影像景物边缘轮廓带有色边;渐晕使得影像中心亮度高与边缘;杂光使得影像减低反差和饱和度,逆光容易产生灰雾和幻影。 球差[1](Spherical aberration) 亦称球面像差。轴上物点发出的光束,经光学系统以后,与光轴夹不同角度的光线交光轴于不同位置,因此,在像面上形成一个圆形弥散斑,这就是球差。 对于单色光而言,球差是轴上点成像时唯一存在的像差。轴外点成像时,存在许多种像差,球差只是其中的一种。 除特殊情况外,一般而言,单个球面透镜不能校正球差,正透镜产生负球差,负透镜产生正球差。对一定位置的物点而言,当保持透镜的孔径和焦距不变时,球差的大小随透镜的形状而异。因此,以适当形状的正、负透镜组合成的双透镜组或双胶合镜组是可能消球差的一种简单结构。保持透镜的焦距不变而改变透镜形状,犹如把柔软的物体弯来弯去,故被称为透镜的整体弯曲,它是光学设计时校正像差的一种重要技巧。 1、单正透镜在后时,需要为了减少给前续系统校正球差带来的困难,因此一般需要将折射率选择片大一些,增大折射率对于校正系统高级球差是很有效的方法之一; 2、在胶合镜组的胶合马面两边,需要考虑选择折射率和阿贝数差别较大的玻璃对,在消色差的同时,正负球差也能够尽量减少,并且有可能产生剩球差平衡其他镜组的球差; 3、在某些镜组(例如单片)曲率太小,承担的光焦度较多。曲率太小的不利结果是:引起大量高级球差和其他高级像差。可以考虑采用两个透镜分担其光焦度,这样增大了球面半径,减少了许多的高级球差。 4、适当的采用负透镜。如果系统中正透镜太多,那么造成的球差和场曲、畸变无法消除,在最后增加一块负透镜会起到很好的校正效果。 当然这些手段有可能造成其他像差的增加,因此这些方法需要适当的因地制宜的采用。 慧差 由位于主轴外的某一轴外物点,向光学系统发出的单色圆锥形光束,经该光学系统折射后,若在理想平面处不能结成清晰点,而是结成拖着明亮尾巴的彗星形光斑,则此光学系统的成像误差成为彗差。 彗差属轴外点的单色像差。轴外物点以大孔径光束成像时,发出的光束通过透镜后,不再相交一点,则一光点的像便会得到一逗点状,型如彗星,故称“彗差”。 慧差是垂轴象差,慧差与光阑位置有关,当光阑无限小是可以消除慧差。 把两个弯月型透镜凹面相对,并在中间设置关阑,当物象倍率为-1时,从光阑所在空间来看,透镜L1的上、下光线分别与透镜L2下、上光线相同,因而两透镜产生相反符号的慧差值,可以完全相消。 场曲法,胶合透镜,光阑可以用来减小慧差。
光学系统与像差全套答案
c 2?解:由 n -得: v I =30 °有几何关系可得该店反射和折射的光线间的夹角为 6、若水面下 200mm 处有一发光点,我们在水面上能看到被该发光点照亮的范围 (圆直 径) 有多大? 解:已知水的折射率为 1.333,。由全反射的知识知光从水中到空气中传播时临界角为: 1 Sin l m 半= =0.75,可得I m =48.59 ; tanl m =1.13389,由几何关系可得被该发光点照 n 1.333 光在水中的传播速度:V 水 3 1Q8(m/S) 2.25(m/s) 1.333 光在玻璃中的传播速度:v 玻璃 C 3 1 沁 1.818(m/s) 1.65 n 玻璃 5米的路灯(设为点光源)1.5米处,求其影子长度。 1 7 x 解:根据光的直线传播。设其影子长度为 X ,则有 可得x =0.773米 5 1.5 x 4.一针孔照相机对一物体于屏上形成一 60毫米高的像。若将屏拉远 70毫米。试求针孔到屏间的原始距离。 3?—高度为1.7米的人立于离高度为 50毫米,则像的高度为 解:根据光的直线传播,设针孔到屏间的原始距离为 X ,则有 卫_ 50 x 60 可得x =300 (毫米) x 5.有一光线以60 的入射角入射于■:'的磨光玻璃球的任一点上, 到球表面的另一点上,试求在该点反射和折射的光线间的夹角。 其折射光线继续传播 解:根据光的反射定律得反射角 I =60 °而有折射定律 n sin I nsin I 可得到折射角 90 °
亮的范围(圆直径)是2*200*1.13389=453.6(mm) 7、入射到折射率为;- ..「1二的等直角棱镜的一束会聚光束(见图1-3),若要求在斜面上发生全反射,试求光束的最大孔径角--' 解:当会聚光入射到直角棱镜上时,对孔径角有一定的限制,超过这个限制,就不会发生全反射了。 1 由sinl m —,得临界角I m 41.26 n 得从直角边出射时,入射角i 180 l m 90 45 3.74 由折射定律■S匹丄,得U 5.68即2U 11.36 sinU n
RLE-ME01-光学系统像差测量实验-实验讲义
光学系统像差测量实验RLE-ME01 实 验 讲 义 版本:2012 发布日期:2012年8月
前言 实际光学系统与理想光学系统成像的差异称为像差。光学系统成像的差异是《工程光学》课程重要章节,也是教学的难点章节,针对此知识点的教学实验产品匮乏。RealLight?开发的像差测量实验采用专门设计的像差镜头,像差现象清晰;涉及知识点紧贴像差理论的重点内容,是学生掌握像差理论的非常理想的教学实验系统。
目录 1.光学系统像差的计算机模拟 1.1.引言---------------------------------------------1 1.2.实验目的-----------------------------------------1 1.3.实验原理-----------------------------------------1 1.4.实验仪器-----------------------------------------4 1.5.实验步骤-----------------------------------------4 1.6.思考题-------------------------------------------5 2. 平行光管的调节使用及位置色差的测量 2.1.引言---------------------------------------------6 2.2.实验目的-----------------------------------------6 2.3.实验原理-----------------------------------------6 2.4.实验仪器-----------------------------------------7 2.5.实验步骤-----------------------------------------8 2.6.实验数据处理-------------------------------------9 2.7.思考题-------------------------------------------9 3. 星点法观测光学系统单色像差
(完整版)光学系统与像差全套答案
2.解:由 v c n =得: 光在水中的传播速度:)/(25.2333 .1) /(1038s m s m n c v =?==水水 光在玻璃中的传播速度:)/(818.165 .1) /(1038s m s m n c v =?== 玻璃 玻璃 3.一高度为1.7米的人立于离高度为5米的路灯(设为点光源)1.5米处,求其影子长度。 解:根据光的直线传播。设其影子长度为x ,则有 x x += 5.157.1可得x =0.773米 4.一针孔照相机对一物体于屏上形成一60毫米高的像。若将屏拉远50毫米,则像的高度为70毫米。试求针孔到屏间的原始距离。 解:根据光的直线传播,设针孔到屏间的原始距离为x ,则有x x 60 5070=+可得x =300(毫米) 5. 有一光线以60°的入射角入射于 的磨光玻璃球的任一点上, 其折射光线继续传播 到球表面的另一点上,试求在该点反射和折射的光线间的夹角。 解:根据光的反射定律得反射角''I =60°,而有折射定律I n I n sin sin ' '=可得到折射角'I =30° ,有几何关系可得该店反射和折射的光线间的夹角为90°。 6、若水面下200mm 处有一发光点,我们在水面上能看到被该发光点照亮的范围(圆直径)有多大? 解:已知水的折射率为 1.333,。由全反射的知识知光从水中到空气中传播时临界角为:n n m I ' sin ==333 .11 =0.75,可得m I =48.59°,m I tan =1.13389,由几何关系可得被该发光点照亮的范围(圆直径)是2*200*1.13389=453.6(mm)
7、入射到折射率为 的等直角棱镜的一束会聚光束(见图1-3), 若要求在斜面上 发生全反射,试求光束的最大孔径角 解:当会聚光入射到直角棱镜上时,对孔径角有一定的限制,超过这个限制,就不会 发生全反射了。 由n I m 1sin = ,得临界角ο26.41=m I 得从直角边出射时,入射角ο οοο74.34590180=---=m I i 由折射定律n U i 1 sin sin =,得ο5.68U =即ο11.362U =
典型光学系统和像差理论三大部分
本课程包括几何光学、典型光学系统和像差理论三大部分,其后继课程是光学CAD课程设计。几何光学部分以高斯光学理论为核心内容,包括了光线光学的基本概念与成像理论、球面和平面光学系统及其成像原理、理想光学系统原理、光能和光束限制等基础内容;典型光学系统部分包括了眼睛、显微镜与照明系统、望远镜与转像系统、摄影光学系统和投影光学系统等成像原理、光束限制、放大倍率及其外形尺寸计算;像差理论详细叙述了光学系统的轴上点像差、轴外点像差和色差的形成原因、概念、现象、基本计算、典型结构的像差特征和校正像差的基本方法,为学生学习光学系统设计打下基础。 教学内容及学时分配: 第一章几何光学基本定律与成像概念(3学时) 第一节发光点、光线和光束第二节光线传播的基本定律、全反射第三节费马原理第四节物、像的基本概念和完善成像条件 第二章球面与球面系统(3学时) 第一节概念与符号规则第二节轴上物点经单个折射球面成像第三节物平面以细光束经折射球面成像第四节反射球面第五节共轴球面系统 第三章平面与平面系统(5学时)第一节平面镜第二节双平面镜第三节平行平板第四节反射棱镜第五节折射棱镜第六节光的色散第七节光学材料 第四章理想光学系统(10学时)第一节理想光学系统及其原始定义第二节理想光学系统的基点与基面第三节物像位置和放大率、焦距和光焦度、节点第四节光学系统的图 解求像第五节光学系统的组合第六节望远镜系统第七节透镜第八 节光学系统的焦距与基点位置的计算、焦距的测定 第五章光学系统中的光束限制(5学时)第一节概述第二节光学系统的孔径光阑、入射光瞳和出射光瞳第三节光学系统的视场光阑、入射窗和出射窗、渐晕光阑第四节平面 上空间像的不清晰度、景深第五节远心光学系统 第六章光能及其计算(5学时)第一节辐射能通量、光通量第二节发光强度、光照度、光出射度和光亮度第三节光学系统光能损失的计算第四节通过光学系统的光通量、像 的照度 几何光学部分总复习(1学时) 第七章典型光学系统(11学时)第一节眼睛第二节放大镜第三节显微镜及照明系统第四节望远镜及转像系统第五节摄影光学系统第六节投影及放映光学系统 第八章像差概论(10学时)第一节轴上点像差第二节轴外点像差第三节色差第四节波像差 第九章像质评价(1学时)第一节中心点亮度第二节瑞利判断第三节分辨率第四节点列图第五节光学传递函数 第一章几何光学基本定律与成像概念(3学时) 1. 发光点、波面、光线、光束的概念
应用光学简答题
应用光学简答题 1、几何光学的基本定律及其内容是什么? 答:几何光学的基本定律是直线传播定律、独立传播定律、反射定律和折射定律。直线传播定律:光线在均匀透明介质中按直线传播。独立传播定律:不同光源的光在通过介质某点时互不影响。反射定律:反射光线位于入射面内;反射角等于入射角;折射定律:折射光线位于入射面内;入射角和折射角正弦之比,对两种一定的介质来说,是一个和入射角无关的常数2111sin sin I n I n 。 2、如何区分实物空间、虚物空间以及实像空间和虚像空间?是否可按照空间位置来划分物空间和像空间? 答:实物空间:光学系统第一个曲面前的空间。虚物空间:光学系统第一个曲面后的空间。实像空间:光学系统最后一个曲面后的空间。虚像空间:光学系统最后一个曲面前的空间。物空间和像空间在空间都是可以无限扩展的,不能按照空间进行划分。 3、什么是共轴光学系统、光学系统物空间、像空间? 答:光学系统以一条公共轴线通过系统各表面的曲率中心,该轴线称为光轴,这样的系统称为共轴光学系统。物体所在的空间称为物空间,像所在的空间称为像空间。 4、什么叫理想光学系统? 答:在物像空间均为均匀透明介质的条件下,物像空间符合“点对应点、直线对应直线、平面对应平面”的光学系统称为理想光学系统。 5、用近轴光学公式计算的像具有什么实际意义? 答:作为衡量实际光学系统成像质量的标准;用它近似表示实际光学系统所成像的位置和大小。
6、 理想光学系统的基点和基面有哪些?其特性如何? 答:理想光学系统的基点包括物方焦点、像方焦点;物方主点、像方主点;物方节点、像方节点。基面包括:物方焦平面、像方焦平面;物方主平面、像方主平面;物方节平面、像方节平面。入射光线(或其延长线)过焦点时,其共轭光线平行与光轴;入射光线过节点时,其共轭光线与之平行;焦平面上任一点发出的同心光束的共轭光束为平行光束;物方主平面与像方主平面共轭,且垂轴放大率为1。 7、对目视光学仪器的共同要求是什么? 答:视放大率||Γ应大于1。 8、什么是理想光学系统的分辨率?写出望远镜的分辨率表达式。 答:假定光学系统成像完全符合理想,没有像差时,光学系统能分辨的最小间隔。 望远镜的分辨率表达式:D /22.1λα=。 9、什么是光学系统的孔径光阑和视场光阑?答:孔径光阑是限制轴上物点成像光束立体角的光阑。视场光阑是限制物平面上或物空间中成像范围的光阑。 10、光学系统中可能有哪些光阑? 答:限制轴上物点成像光束的口径或立体角大小的孔径光阑;限制物平面上或物空间中成像的范围即限制视场大小的视场光阑;用于产生渐晕的渐晕光阑;用于限制杂散光的消杂光阑。 11、如何确定光学系统的视场光阑? 答:将系统中除孔径光阑以外的所有光阑对其前面所有的光学零件成像到物空间。这些像中,孔径对入瞳中心张角最小的一个像所对应的光阑即为光学系统的视场光阑。
光学设计第11章 波像差
第十一章 波像差 前面对像差的讨论是以几何光学为基础的,用光线经过光学系统的实际光路相对于理想光路的偏离来度量的,统称为几何光学。但光线本身是一抽象的概念,用它的密集程度来评价像质,在很多场合下与实际情况并不符合,而且像差也不可能校正为零。因此,必须考虑像差的最佳校正方案和像差的容限问题,它与系统的使用要求和使用状况有关。这些像质评价问题常须基于光的波动本质才能解决。 几何光学中的光线相当于波动光学中波阵面的法线,因此,物点发出的同心光束与球面波对应。此球面波经过光学系统后,改变了曲率。如果光学系统是理想的,则形成一个新的球面波,其球心即为物点的理想像点(实际上,由于受系统有限孔径的衍射,即使是理想系统也不可能对物点形成点像)。但是,实际的光学系统的像差将使出射波面或多或少地变了形,不再为理想的球面波。这一变了形的实际波面相对于理想球面波的偏离,就是波像差。 波像差与像质评价问题密切相关。例如要计算斯特列尔强度比(即中心点亮度)和光学传递函数时,就必须求知波像差,而瑞利判断更是直接以波像差的大小来作评价标准的。加之波像差与几何像差之间有内在联系,利用这种联系,可在一定程度上解决像差的最佳校正问题和容限问题。 §1. 轴上点的波像差 对于轴对称光学系统,轴上点发出的球面波经系统以后,只是由于唯一的球差,使出射波面变形而偏离于球面。由于轴上点波面是轴对称的,其波像差只需从波面与子午平面相截的截线上,取光轴以上的一方来考察即可。 图11-1 轴上点的波像差 如图11-1所示,//Z P 是波面的对称轴(即系统的光轴),/P 是系统的出射光瞳中心。以实际光线与光轴//Z P 的交点/A 为圆心,以r P A =//为半径做圆(实际为球面),即为实际波面。过/A 点做与光轴成像方孔径角/ U 的直线,就是实际光线,设实际光线与实际波面相交于M 点,则r M A =/ 。
校正光学系统像差的原则及方法
校正光学系统像差的原则及方法 来源: 加入日期:2009-06-09 校正光学系统像差的原则和方法:(1)各光组以至各面的像差分布要合理。在考虑初始结构时,可将要校正的像差列成用P、W表示的方程组,这种方程组可能有多组精确解,也可能是病态的,或无解。若是前者,应选一合理的解;若是后者,应取最小二乘解。总之,有多种解方程组的算法可资利用,在计算机上实现并不困难。然后,应尽量做到各个面上以较小的像差值相抵消,这样就不至于会有很大的高级像差。在此,各透镜组的光焦度分配、各个面的偏角负担要尽量合理,要力求避免由各个面的大像差来抵消很多面的异号像差。 (2)相对孔径h/r或入射角很大的面即曲率半径小的面,一定要使其弯向光阑,以使主光线的偏角或 ip角尽量小(即降低主光线的投射高),以减少轴外像差。反之,背向光阑的面只能有较小的相对孔径。 (3)像差不可能校正到完美无缺的理想程度,最后的像差应有合理的匹配。这主要是指:轴上点像差与各个视场的轴外像差要尽可能一致,以便能在轴向离焦时使像质同时有所改善;轴上点或近轴点的像差与轴外点的像差不要有太大的差别,使整个视场内的像质比较均匀,至少应使0.7视场范围内的像质比较均匀。为确保0.7视场内有较好的质量,必
要时宁愿放弃全视场的像质(让他有更大像差)。因为在0.7视场以外已非成像的主要区域,当画幅为矩形时(如照相底片),此区域仅是像面一角,其像质的相对重要性可以较低些。 (4)挑选对像差变化灵敏、像差贡献较大的表面改变其半径。当系统中有多个这样的面时,应挑选其中既能改良所要改的那种像差,又能兼顾其他像差的面来进行修改。在像差校正的最后阶段尚需对某一、二种像差做微量修改时,作单面修改也是能奏效的。 (5)若要求单色像差有较大变化而保持色差不变,可对某个透镜或透镜组作整体弯曲。这种做法对消除色差和匹兹凡和以外的所有像差均属有效。 (6)利用折射球面的反常区。在一个光学系统中,负的发散面或负透镜常是为校正正透镜的像差而设置,它们只能是少数。因此,让正的会聚面处于反常区,使其在对光起会聚作用的同时,产生与发散面同号的像差就显的特别有利。设计者应善于利用这一性质。 (7)利用透镜或透镜组处于特殊位置时的像差性质。例如,处于光阑或与光阑位置接近的透镜或透镜组,主要用于改变球差和慧差(用整体弯曲的方法);远离光阑位置的透镜或透镜组,主要用来改变像散、畸变和倍率色差。在像面或像面附近的负场镜可以用来校正像面弯曲。
第一讲 作业
第一章光学系统像质评价作业: 1.1检验实际光学系统成像质量的常用方法有哪几种? 分辨率检验、星点检验、波象差检测、光学传递函数检测 1.2在光学系统设计阶段评价成像质量的方法有哪几种? ①几何光学方法:几何像差,波像差,点列图,几何光学传递函数 ②物理光学方法:点扩散函数,相对中心光强,物理光学传递函数 1.3什么是色差?光学系统中色差有哪几种?色差如何校正? 色差:对白光成像的光学系统,由于材料对不同波长的色光折射率不同,使各色光线具有不同的成像位置和倍率。轴向色差:不同颜色像点沿光轴方向的位置之差;垂轴色差:不同颜色像对应大小之差。色差校正:①采用不同色散不同折射率玻璃的组合;②采用折衍混合的技术;③采用反射镜。 1.4共轴光学系统轴上点有哪几种像差? 球差、位置色差。 1.5什么是光学系统的像差?存在像差时对系统成像会有什么影响?
实际光学系统不能用近轴光成像,实际光学系统有一定的角度,球面系统不能成理想像,这就是光学系统的像差。它会影响成像清晰度还有形变。 1.6 请列举出,在光学系统中的曲面方程里,基准二次曲面系数K的值与面型的关系。 双曲面:K<0;抛物面K=0;椭球面0
典型光学系统中像差研究的一些问题
典型光学系统中相差研究的一些问题 摘要本文先简单介绍像差理论,包括几种像差及其成因。然后介绍了在典型光学成像系统中的像差研究的一些问题,有基于人眼模型的不同瞳孔直径下眼像差特性、变焦显微系统的像差分析、全息校正望远镜主镜像差原理。最后得出总结。关键词像差理论人眼像差特性变焦显微镜像差望远镜主镜像差 1 引言 像差研究是应用光学中一个很重要的部分。在实际光学系统设计中,如何减少像差对物像质量的影响,得到实际要求范围内的物像是一个很关键的问题。所以在应用光学的学习中对于像差的学习以及了解现在像差研究的一些问题是十分必要的。借此次大作业的机会,我对这方面的问题进行了简单的了解和研究。本文先根据课上内容对像差理论进行简单的介绍和小结,然后介绍了在人眼、望远系统和显微系统中像差研究的一些问题。 2 像差理论简介 在光学系统中实际所成的象与理想象总是有差异,这种成象的差异就称为光学系统的像差。像差分为以下几类: (1)球差:由光轴上某一物点向镜头发出的单一波长的光线成象后,由于透镜球面上各点的聚光能力不同,它不再会聚到象方的同一点,而是形成一个以光轴为中心的对称的弥散斑,这种象差称为球差,如下图所示。 (2)慧差:光轴外的某一物点向镜头发出一束平行光线,经光学系统后,在象平面上会形成不对称的弥散光斑,这种弥散光斑的形状呈彗星形,即由中心到边缘拖着一个由细到粗的尾巴,其首端明亮、清晰,尾端宽大、暗淡、模糊。这种轴外光束引起的象差称为彗差,如下图所示。彗差的大小是以它所形成的弥
散光斑的不对称程度来表示。彗差的大小既与孔径有关,也与视场有关。 (3)像散:像散也是一种轴外象基,与彗差不同,它是描述无限细光束成象缺陷的一种象差,仅与视场有关。由于轴外光束的不对称性,使得轴外点的子午细光束的会聚点与弧矢细光束的会聚点各处于不同的位置,与这种现象相应的象差,称为像散。子午细光束的会聚点与矢细光束的会聚点之间距离在光轴上的投影大小,就是象散的数值。如下图所示。 (4)场曲:当垂直于光轴的物平面经光学系统后不成象在同一象平面内,而在一以光轴为对称的弯曲表面上,这种成象缺陷称为场曲。场曲也是与孔径无关的一种象差。由于象散的存在,子午细光束所形成的弯曲象面与弧矢细光束所形成的弯曲象面往往不重合,它们分别称为子午场曲Xt'和弧矢场曲Xs',如下图所示。 (5)畸变:畸变是指物体所成的象在形状上的变形。畸变并不影响象的清晰度,只影响物象的相似性。由于畸变的存在,物空间的一条直线在象方就变成一条曲线,造成象的失真,如下图所示。畸变分桶形畸变和枕形畸变两种。畸变与
- RLE-ME01-光学系统像差测量实验-实验讲义要点
- 第一章光学系统的像差
- 光学系统的像差理论和像质评价
- 第六章 光学系统的像差
- 工程光学 第六章光学系统的像差
- 本课程包括几何光学、典型光学系统和像差理论三大部分,
- 第六章 光学系统的像差
- RLE-ME01-光学系统像差测量实验-实验讲义
- (完整版)光学系统与像差全套答案
- 典型光学系统中像差研究的一些问题
- 光学系统像差理论综合实验
- 光学系统的像差_色差
- 光学系统像差总结
- (完整版)第六章光学系统的像差(新)
- 第九章 光学系统的像差
- 光学系统的像差基础
- 光学系统像差理论综合实验
- 光学系统的像差.
- 第9章 光学系统的像差
- 华中科技大学 《应用光学》课程PPT——第九章 光学系统的像差