小智机器人终端传感器使用说明书8.1

小智机器人终端传感器详细使用说明
一、电子钥匙扣
产品图片及描述:
?电子钥匙( Beacon)是用于识别身份的电子标签ID,系统有自动识别电子钥匙扣离家和回家的功能,长按钥匙扣上的按钮5秒,有SOS紧急求救的功能。
操作说明
?短按一下是手动【布防模式】和【撤防模式】选择,同时小智机器人会语音提示家人及推送图片和文字消息
给手机QQ,告知用户当前状态。
?钥匙扣还有自动识别钥匙扣是离家还是在家功能,当小智机器人检测到钥匙扣时,会推送消息给用户手机
QQ,提示某某人的钥匙扣回家了。离家时也会推送消息给用户手机QQ,提示某某人的钥匙扣离开家了。已
便你及时了解家人状态。
?长按钥匙扣上的按钮5秒,有SOS紧急求救的功能,小智机器人会语音提示,并推送现场照片及消息到您手
机QQ。已便你第一时间处理,守护家人安全。
?由于终端设备的功耗非常低,因此它需要在5分钟内完成连接过程。不然传感器会进入低功耗状态,不再向外发
射入网信息,此时需要给传感器重新上电才能脱离低功耗状态
恢复出厂默认设置方法:
?在5秒内连续按按键15次左右,便可恢复出厂默认设置,点击【重新搜索】,即可重新添加入网。
退出低功耗方法:
?用指甲轻轻插入印有字母文字的那一面外壳,用力裂开外壳,将电池取掉后再装回,扣紧外壳。即可退出低功耗模式,点击【重新搜索】即可入网。
警告及注意事项:
?本产品仅限于室内使用,请勿用于潮湿的环境。
?请置于远离儿童的地方
?安装方向一定要确保正确,否则触发不上报消息。
二、门窗传感器
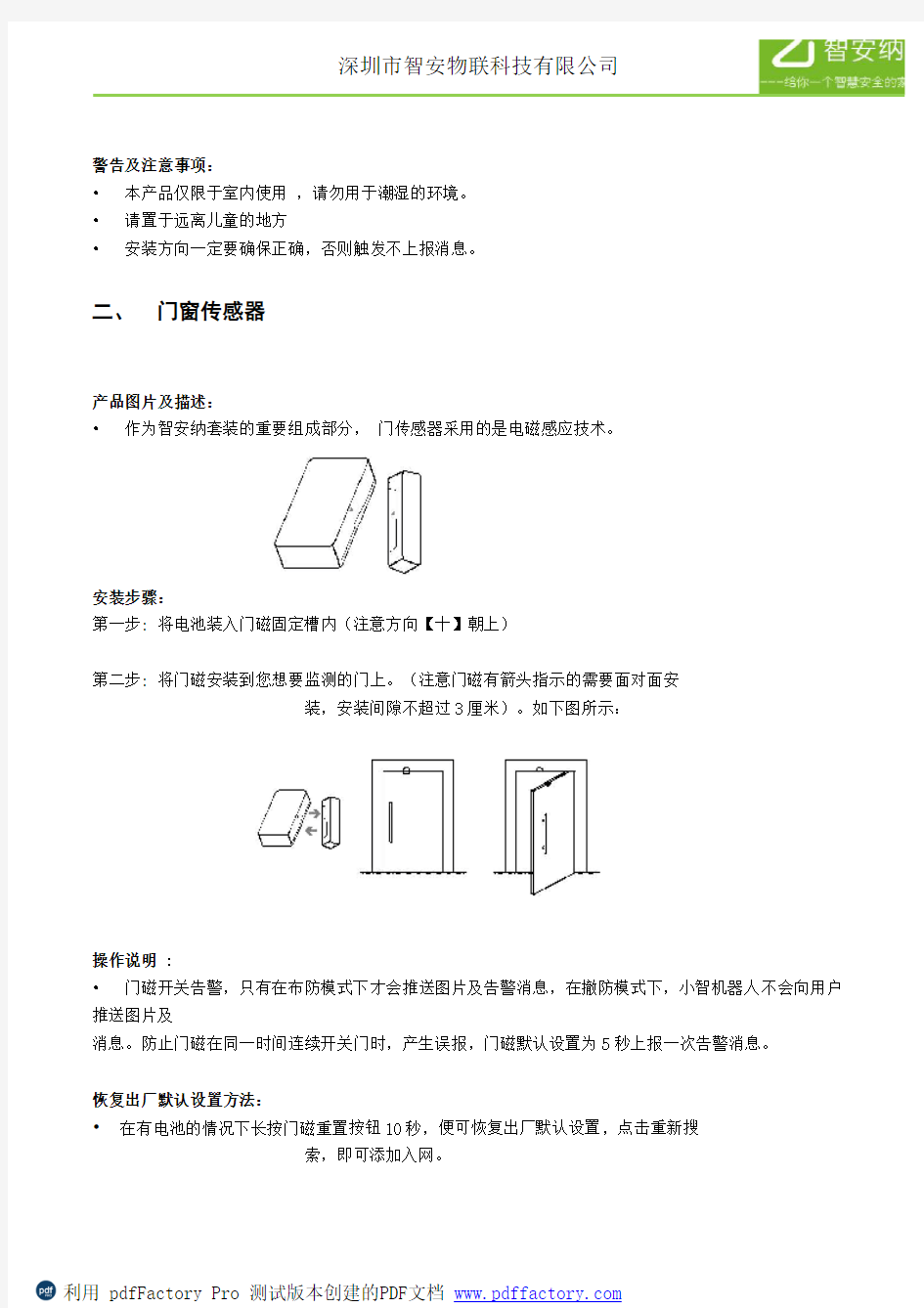
产品图片及描述:
?作为智安纳套装的重要组成部分,门传感器采用的是电磁感应技术。
安装步骤:
第一步: 将电池装入门磁固定槽内(注意方向【十】朝上)
第二步: 将门磁安装到您想要监测的门上。(注意门磁有箭头指示的需要面对面安
装,安装间隙不超过3厘米)。如下图所示:
操作说明 :
?门磁开关告警,只有在布防模式下才会推送图片及告警消息,在撤防模式下,小智机器人不会向用户推送图片及
消息。防止门磁在同一时间连续开关门时,产生误报,门磁默认设置为5秒上报一次告警消息。
恢复出厂默认设置方法:
?在有电池的情况下长按门磁重置按钮10秒,便可恢复出厂默认设置,点击重新搜
索,即可添加入网。
退出低功耗方法:
?用户在入网操作中,由于不熟练或添加先后顺序搞反等情况下,设备进入低功耗模式,此时不将设备退出低功耗状态,是入不了网的。操作方法,用小螺丝将设备电池取掉再装回去,长按门磁重置10秒,便可恢复出厂默认网入状态。点击搜索即可入网。
警告及注意事项:
?由于终端设备的功耗非常低,因此它需要在1分钟内完成连接过程。另外退网后再入网要在恢复出厂设置后5分钟以内完成入网,不然传感器会进入低功耗状态,不再向外发射入网信息,此时需要给传感器重新上电才能脱离低功耗状态。本产品仅限于室内使用,请勿用于潮湿的环境。请置于远离儿童的地方安装方向一定要确保正确,否则触发不上报消息。
三、红外人体感应器
产品图片及描述:
?人体感应被动红外(PIR)传感器主要用于检测人体的运动,是智能家居系统的重要组成部分。
安装步骤:
第一步:打开外壳,拔掉电池绝缘带。
第二步:将红外人体感应器安装到您想要监测的区域墙上。
备注:下图是该传感器检测区域的示意图。为避免宠物意外触发警报,我们建议您将传感器放置在正确/合适的位置,确保宠物不会进入检测区域。
操作说明
?红外人体感器开关告警,只有在布防模式下才会推送图片及告警消息,在撤防模式下,小智机器人不会向用户推
送图片及消息。
?为防止红外人体感应器在同一时间连续有物体移动时,产生误报,PIR默认设置为5秒上报一次告警消息。
?由于终端设备的功耗非常低,因此它需要在5分钟内完成连接过程。不然传感器会进入低功耗状态,不再向外发
射入网信息,此时需要给传感器重新上电才能脱离低功耗状态。
恢复出厂默认设置方法:
?在有电池的情况下长按门磁重置按钮10秒,便可恢复出厂默认设置,点击【重新搜索】,即可重新添加入网。
退出低功耗方法:
?操作方法:用小螺丝将设备电池取掉再装回去,即可退出低功耗模式。
警告及注意事项:
?本产品仅限于室内使用,请勿用于潮湿的环境。
?请置于远离儿童的地方
?安装方向一定要确保正确,否则触发不上报消息。
四、系统扩展
本系统可扩展添加多种智能设备,如振动传感器、照明设备、烟雾检测器、智能插座等终端设备
震动传感器智能灯泡烟雾探测器智能插座
压力传感器的安装方法及使用要求
●检查安装孔的尺寸 如果安装孔的尺寸不合适,传感器在安装过程中,其螺纹部分就很容易受到磨损。这不仅会影响设备的密封性能,而且使压力传感器不能充分发挥作用,甚至还可能产生安全隐患。只有合适的安装孔才能够避免螺纹的磨损(螺纹工业标准1/2-20 UNF 2B),通常可以采用安装孔测量仪对安装孔进行检测,以做出适当的调整。 ●保持安装孔的清洁 保持安装孔的清洁并防止熔料堵塞对保证设备的正常运行来说十分重要。在挤出机被清洁之前,所有的压力传感器都应该从机筒上拆除以避免损坏。在拆除传感器时,熔料有可能流入到安装孔中并硬化,如果这些残余的熔料没有被去除,当再次安装传感器时就可能造成其顶部受损。清洁工具包能够将这些熔料残余物去除。然而,重复的清洁过程有可能加深安装孔对传感器造成的损坏。如果这种情况发生,就应当采取措施来升高传感器在安装孔中的位置。 ●选择恰当的位置 当压力传感器的安装位置太靠近生产线的上游时,未熔融的物料可能会磨损传感器的顶部;如果传感器被安装在太靠后的位置,在传感器和螺杆行程之间可能会产生熔融物料的停滞区,熔料在那里有可能产生降解,压力信号也可能传递失真;如果传感器过于深入机筒,螺杆有可能在旋转过程中触碰到传感器的顶部而造成其损坏。一般来说,传感器可以位于滤网前面的机筒上、熔体泵的前后或者模具中。 ●仔细清洁 在使用钢丝刷或者特殊化合物对挤出机机筒进行清洁前,应该将所有的传感器都拆卸下来。因为这两种清洁方式都可能会造成传感器的震动膜受损。当机筒被加热时,也应该将传感器拆卸下来并使用不会产生磨损的软布来擦拭其顶部,同时传感器的孔洞也需要用清洁的钻孔机和导套清理干净。 ●保持干燥 尽管传感器的电路设计能够经受苛刻的挤出加工环境,但是多数传感器也不能绝对防水,在潮湿的环境下也不利于正常运行。因此,需要保证挤出机机筒的水冷装置中的水不会渗漏,否则会对传感器造成不利影响。如果传感器不得不暴露在水中或潮湿的环境下,就要选择具有极强防水性的特殊传感器。
arduino人形机器人教材
人形机器人教材 ———基于Arduino开发平台V1.0 目录 一、机器人的组装 (1)
Arduino人形机器人教材 1.1. 组装工具 (1) 1.2. 机器人零部件 (1) 1.3. 部件装配 (3) 二、系统概述 (21) 2.1.arduino介绍 (21) 2.2.Arduino驱动安装 (25) 2.3.Arduino IDE菜单介绍 (31) 2.4.24路舵机驱动板介绍 (36) 2.5.图形化动作编辑软件 (37) 三、实验操作 (48) 3.1舵机实验 (48) 3.1.1 舵机介绍 (48) 3.1.2 舵机的内部结构 (48) 3.1.3舵机的控制协议 (52) 3.1.4 舵机实验操作 (53) 3.2.声音传感器 (55) 3.2.1声音传感器介绍 (55) 3.2.2声音传感器实验操作 (55) 3.3 PS2手柄 (57) 3.3.1 PS2手柄介绍 (57) 3.3.2 PS2手柄实验操作 (58) 四、使用说明 (66) 4.1.接线端口介绍 (66) 4.2.操作说明 (66) 4.3.开发指南 (67)
注意事项 请认真阅读该手册并注意产品功能和用途说明。本手册在CD光盘上以PDF格式提供,如有需要可以进行复制或打印。 该手册内容可能因产品升级或其他原因而改变,本公司不另行通知客户。 安全防备 根据严重程度,安全防备分两种:警告和注意。在动手安装之前请先通篇阅读警告和注意事项。 安装和操作注意 本段包含防止机械损伤方面的内容。 危险! 当操作机器人的时候要注意安全。 如果没有正确组装,机器人将不能正常工作甚至会损坏。组装方法详见第一章机器人组装说明。 在一个足够大的地方进行调试工作 警告! 远离小孩。尽管该产品看起来像个玩具,在无人照看的情况下,它可能会对小孩造成伤害。 故障发生时,请立即关闭电源。如果电池被弄破,暴露在液体,火或其他热源面前,可能会导致电击。 不要拆开或修改充电器和其电缆。 当不充电时,请把充电器从电源上拔下。 不要拆卸或修改电机里面的电路板。 不要在热,潮湿或寒冷的环境下使用,因为该产品包含精密的元件。如果处在一个极端的条件下,错误可能发生。 充电时请确认充电器插座是牢固的。 请仔细阅读本手册,在调试时注意机器人各关节的方向,尽量避免关节相撞。 注意! 机器人的电机需要定期维护以获得和维持恰当的性能。 在一个较大,平整的地方操作时机器人的表现效果会更好。如果工作空间很小又不平的话,机器人可能会摔倒甚至损坏。 在启动了机器人或操作的时候请不要把住机器人。 在程序的下载过程中不要关闭机器人电源,否则程序会丢失或损坏。 电池! 套件里面包含锂离子(Li-Ion)电池做电源。该锂离子(Li-Ion)电池是高能量可充电的电池,必须妥善保管,充电和使用。 把充电器接入交流电源并把他连到电池的充电接口上。当充电器接到交流电源后,它上面的电源灯会亮起来并呈红色。状态指示灯会呈绿色,当电池充电完成,绿色指示灯熄灭。
E+H压力传感器调试说明书
E+H压力传感器调试说明书 仪表上电后显示:MEASURE VALUE XXX.XX m3 按E进入组菜单,显示GROUP SLECTION LANGUAGE MEASURE MODE QUICK SETUP OPERATING MENU 按-号,到MEASURE MODE,按E选中,并出现在它之前,再按E,进入出现: PRESSURE LEVEL FLOW 按-号,到LEVEL,按E选中,并出现在它之前,再按E,进入出现: LEVEL EASY PRESSURE LEVEL EASY HEIGHT LEVEL STANDARD 按-号,到LEVEL STANDARD,按E选中,并出现在它之前,再按E,返回MEASURE MODE,按-号,直到显示GROUP SLECTION OPERATING MENU LANGUAGE MEASURE MODE 按E选中,并出现在它之前,再按E进入,出现:
SETTING POSITION ADJUST TMENT POS.ZERO ADJUST 按E进入,按-号直到出现: BASIC SETUP 按E进入,出现: PRESS.ENG.UNIT m bar 按E确认,出现: Linear Pressure linearized Height linearized 按-号,到Pressure linearized,按E选中,并出现在它之前,再按E,出现: PRESSURE & % PRESSURE & VOLUME PRESSURE & MASS 按-号,到PRESSURE & VOLUME,按E选中,并出现在它之前,再按E,出现: UNIT VOLUME M3 按E确认,并出现: HYDR. PRESS MIN.
人型机器人动作编辑软件使用说明书
人型机器人动作编辑软件使用说明书 一.介绍 本软件是用于对人型机器人进行动作编辑、程序下载和控制机器人的工具。使用该软件,使用者可以编辑机器人的动作文件,在三维图形中预览编辑的动作,并可以将编辑的动作结果下载到实际的机器人上运行。 二.系统要求 该软件对系统除下载电缆接口外,没有特殊要求,通常的家用台式计算机都可以满足使用要求。对于笔记本计算机等不具备RS232串行接口的计算机用户可以通过配备USB 用户可以根据情况选择下面两种方法之一安装软件。 1.使用Install程序安装。运行计算机中的Install软件后,按提示指定安装目录就可以完成该人型机器人控制软件的安装,安装软件将在桌面上建立该软件的文件夹和图 标。 2.将光盘中Setup目录拷贝到计算机的硬盘中,运行该目录中的setup.bat文件,然后手工在桌面建立该目录下HumanoidRobotCtrl.exe文件和SetOrigin.exe文件的快捷 方式即可。 注意: 1.SetOrigin.exe文件、RobotCtrl.exe文件、object目录和config目录处于同一根目录 下。SetOrigin.exe是机器人零位设置程序;HumanoidRobotCtrl.exe是机器人动作编 辑与控制程序;object目录存放机器人的三维模型;config目录存放程序运行所必 须的配置信息。 2.软件安装后,请确认用户所使用的计算机是否具有RS232串行接口,如果不具备请 安装USB转RS232的接口。 3.安装RS232接口后,用户需要使用文本编辑器打开config\config.txt文件,并将其 中的第一行的数字改成所使用的串口号码。例如通常计算机具有的RS232串行接口 为COM1,我们将设置config.txt中第一行的数字改写为1。系统安装后config.txt 中的默认设置为1。 4.config\config.txt文件为本软件的配置文件,请不要随便改动该文件中的内容,关于 config.txt文件中的数据格式详见附录1。config\Origin.txt存放机器人的零位信息, 请不要随便改动该文件中的内容,关于Origin.txt文件的数据格式详见附录2。四.软件的使用 机器人的使用包括两部分,首先是通过SetOrigin.exe软件设置机器人的零位,然后是通过HumanoidRobotCtrl.exe软件进行动作的编辑和机器人的控制。
氧传感器技术手册
氧传感器使用说明书 (第一版) 适用零件号:25327985 25359908
1.概述 氧传感器是现代发动机管理系统中必不可少的重要零部件。它是一种利用电化学工作原理发展出来的电器元件。 氧传感器在现代发动机管理系统的配置机构中被用于探测汽车发动机所排出的燃烧废气中氧的含量,借以判定发动机实时燃油供给空气燃料混合比的实际状态,并通过自身产生的电器反应信号反馈给发动机电子控制模块(ECM),以作为系统燃油管理系统的闭环燃油修正补偿控制的重要依据,使燃油管理子系统能够更加精确地控制调整发动机各种工作状态下的空气燃料混合比;并在绝大多数工况下使系统保持在理想空燃比工作状态,以便获得更加优良的汽车排放控制特性和燃油经济性。 氧传感器的输出信号为0 ~ 1V的交变电压信号。传感器可根据发动机所排燃烧气中氧的含量高低自动感应和探测并向发动机电子控制模块输出这一高低变化的电压信号。 现代发动机管理系统采用的氧传感器有两种主要类型:非加热型氧传感器和加热型氧传感器。 装配在发动机排气歧管上的氧传感器,由于可以利用发动机所排出燃烧废气的余热进行快速加热,故可使用价格低廉的非加热型氧传感器;当氧传感器的安装位置受到整车布置限制,氧传感器距离发动机排气歧管出口较远时,由于不能利用发动机燃烧废气对于传感器迅速加热,此时必然需要采用加热式氧传感器。 加热式氧传感器的内部设计有热敏电加热元件,可利用系统供电电压强制使氧传感器加速预热,促使其快速起燃,及早实现系统的闭环燃油管理控制。
2. 工作原理 德尔福公司生产的氧传感器是采用氧化锆元件作为传感器的基础元件。氧化锆元件是一种通体充满无数微孔的陶瓷基础元件外面镀有氧化锆涂层,该涂层外测暴露于发动机燃烧废气之中;涂层的内侧透过含微孔的陶瓷元件与大气相通。集中在氧化锆内外两侧电极之间氧含量的差别形成的微分电压信号。 当氧化锆元件被电流加热或被流经传感器的发动机燃烧废气加热所激活,空气经过通体充满无数微孔的陶瓷基础元件进入氧化锆元件的内电极,而燃烧废气流经氧化锆的外电极。氧离子将从氧化锆内电极向外电极移动,传感器的内外电极之间构成了一个简单的原电池,发动机燃烧废气中氧含量的变化不同在两个电极之间产生不同的输出电压信号。氧传感器将根据发动机燃烧废气中氧离子浓度的高低变化来改变这一输出电压信号的高低。 氧传感器通常的工作表现为在当发动机的工作时空燃比变稀时,排气中氧含量的浓度将会升高,此时,氧传感器的输出电压信号接近 0V;当空燃比变浓时,排气中氧含量的浓度降低,传感器的输出电压将接近 1V。 发动机电子控制模块(ECM)根据这一输入电压信号,配合系统控制逻辑及控制策略,通过响应的传感器和执行器,就可以调整系统输出控制指令,使发动机工作在和保持理想的空燃比燃油供给状态。 氧传感器核心元件允许的最低工作温度为300摄氏度;最高温度一般不超过850摄氏度。具体情况参照实际产品图纸规定的实际数值为准。 氧传感器是闭环燃油管理控制子系统的关键元件。正是由于有了该传感器才使得发动机的空燃比的闭环燃油控制成为可能,从而使系统实现为达到最佳三元催化转换器转化效率所需的理想空燃比的控制目标,实现最佳发动机燃烧控制目的。 3. 结构特征 德尔福公司生产的现代发动机管理系统配套用氧传感器的主要特点为: ?零部件统一设计,全球采购系统可保障全球产品性能的一致性 ?传感器具备防水功能 ?无需空气渗透过滤装置 ?通用化接口结构设计,简便易于替代竞争对手产品 ?大批量生产,大批量产品应用考核,可靠性能优良 ?超强低温适应性能
氧化锆氧传感器的原理及应用
氧化锆氧传感器的原理及应用 第一部分氧化锆氧传感器工作原理 一、产品简介: 氧化锆氧传感器是利用氧化锆陶瓷敏感元件测量各类加热炉或排气管道中的氧电势,由化学平衡原理计算出对应的氧浓度,达到监测和控制炉内燃烧空然比,保证产品质量及尾气排放达标的测量元件,广泛应用于各类煤燃烧、油燃烧、气燃烧等炉体的气氛控制。它是目前最佳的燃烧气氛测量方式,具有结构简单、响应迅速、维护容易、使用方便、测量准确等优点。运用该传感器进行燃烧气氛测量和控制既能稳定和提高产品质量,又可缩短生产周期,节约能源。 二、氧传感器工作原理: 氧传感器是利用稳定的二氧化锆陶瓷在650℃以上的环境中产生的氧离子导电特性而设计的。在一定的温度条件下,如果在二氧化锆块状陶瓷两侧的气体中分别存在着不同的氧分压(即氧浓度)时,二氧化锆陶瓷内部将产生一系列的反应,和氧离子的迁移。这时通过二氧化锆两侧的引出电极,可测到稳定的毫伏级信号,我们称之为氧电势。它服从能斯特(Nernst)方程:式中E为氧传感器输出的氧电势(mv),Tk 为炉内的绝对温度(K),P1和P2分别为二氧化锆两侧气体的氧分压。实际应用时,将二氧化锆的一侧通入已知氧浓度的气本(通常为空气),我们称之为参比气。另一侧则是被测气体,就是我们要检测的炉内的气氛,详见图1。氧传感器输出的信号就是氧电势信号,通过能斯特方程我们就可以得到被测炉气氛中的氧分压和氧电势的关系。参比气为空气时,可表示为:式中E为氧传感器输出氧电势;Tk为炉内的绝对温度;P02为炉内的氧分压。我们的氧传感器产品带有自加热装置,一般温度保证在700℃,这样TK数值基本是恒定的,从而通过上式可以直接测量出炉内氧分压浓度。工程应用中采用标准气体来标定氧传感器输出氧电势E和氧分压浓度PO2的对应关系,这种方法也是目前公认的最准确、最直接的标定方法。 第二部分 HMP系列氧传感器 一.HMP氧传感器基本结构: HMP氧传感器的核心部件采用进口氧化锆氧传感器(详见图2),该氧化锆氧传感器自带智能加热装置,提供稳压恒定控制信号即可快速达到使用温度,并保证传感器在该恒定温度下连续、稳定工作。安装该探头需要调整引导板方向,尽量使引导板正对气流方向,这样才能形成对检测气氛的气体自导流。进口氧化锆氧传感器典型性能特性如下:零点误差:£±0.2mv ;交流电阻(1500赫兹):(700℃)£100 千欧;(1100℃)£ 5 千欧。响应时间(700-1300℃):£1秒 二.HMP氧传感器采样、维护方式: HMP氧传感器采用气氛自导流方式,导入被检测气氛,考虑工程现场的环境因数,设计有吹扫清除通道,可方便地对采样引导管道进行吹扫工作,以避免炉内或管道内的灰尘、煤灰、油杂质等等堵塞采样管,请参考图3。 三.技术性能: 使用温度:室温~1100℃;氧电势显示范围:-50~1240mV;氧电势输出精度:±0.5mV;响应时间:≤1秒;正常使用使用寿命:≥18个月。 第三部分氧传感器的安装 合理的安装是保证氧传感器可靠运行的关键,许多使用问题均由于氧传感器安装不当造成的,希望用户一定要特别注意这一点,安装氧传感器请尽量考虑氧传感器的安装要求: 一、采样测量点: 确定测量点是首要的工作。应遵循如下几项原则: (1)选择的测量点要求能正确反映所需要的炉内气氛,以保证氧传感器输出信号的真实性,尽量避开回风死角;
GF型风流压力传感器说明书
ISO9001:2000认证企业 产品使用说明书 GF型风流压力传感器 感谢您选购本产品!为了保证安全并获得最佳效能,安装、使用产品前, 请详细阅读本使用说明书并妥善保管,以备今后参考。 1
前言 本说明书详细地介绍了GF型风流压力传感器的使用方法及使用注意事项,使用者在使用前请务必仔细阅读。GF型风流压力传感器在生产过程中执行的是煤炭科学研究院重庆分院的企业标准Q/MKC 56-2005。 I
目次 前言…………………………………………………………………………………………I 1 概述 (1) 2 工作原理与结构 (2) 3 技术特性 (3) 4 尺寸、重量 (4) 5 使用、调校 (4) 6 典型故障处理 (5) 7 维护、保养 (6) 8 运输、贮存 (6) 9 开箱及检查 (6) 10 其它 (7) II
GF型风流压力传感器 1 概述 GF型风流压力传感器,是一种专门用于监测煤矿井下巷道及瓦斯抽放管道负压的模拟量传感器,对于监测井下风压变化,确保矿井正常通风、配风及瓦斯抽放管路安全等方面有着重要作用,用于老塘漏风,隔墙密闭质量的连续监测的重要传感器,能就地数字显示风压或管道压力变化。 1.1 产品特点 1.1.1 GF型风流压力传感器在设计中采用了新型单片微机和高集成数字化电路,简化了电路结构,提高了整机性能的可靠性,便于维护与调试。 1.1.2 本传感器在整机的零点、灵敏度调校上实现了红外遥控调校功能,方便了仪器的调校工作。 1.1.3 本传感器在电源设计上采用新型开关电源,大大降低了整机功耗,增加了传感器的传输距离。 1.1.4 本传感器增设了故障自检功能,方便了使用与维护。 1.1.5本传感器的外壳采用了高强度结构,使整机具有很强的抗冲击能力。 1.2 主要用途和适用范围 1.2.1 主要用途 GF型风流压力传感器主要用于老塘漏风,隔墙密闭质量的连续监测。 1.2.2 适用范围 井下煤尘巷道、回风巷的通风配风、瓦斯抽放管道的负压监测。 1.3 型号的组成及其代表意义 G F □□ (A) 设计序列号 F代表负压传感器,Z代表正压传感器 测量范围 风流压力 传感器 1.4 环境条件 1.4.1 工作条件 a) 工作温度: 0 ℃~40 ℃; b) 相对湿度: ≤95 %; c) 大气压力: 80 kPa~106 kPa; 1
pf20系列压力传感器手册
efector 500电子压力传感器操作说明
1显示屏菜单结构P.3 (图) 2编程P.4 1.选择参数; 2.设定数值*; 3.参数值确定。 * 当参数调至最大设定值,继续调整参数值将从最小的设定值重新开始循环。在设置开关点(SPx,rPx)或模拟输出信号(ASP,AEP)的限制之前选定显示单位,这将避免单位转换中舍入误差的发生,得到更精确的设定值。 3安全提示 ●安装之前请阅读产品说明; ●请检查该产品是否适合你的使用; ●用户如未遵循本手册的操作说明或技术数据进行操作,可能发生 人身伤害或财产损失; ●在所有应用中,请检查本产品的材料(参看技术数据)是否适用 于所测量的物质。 4控制和显示说明 (图)P.20 5功能及特性 ●该压力传感器检测系统压力;
● 显示屏指示当前系统压力; ● 5.1 程序设定 通过设定各类参数,所测信号的赋值是不同的,可应用于各自不同的应用。(见9、11.1节) 5.2 EHEDG 3A 部件已通过EHEDG 和3A 认证。 5.3 应用 1)如显示到负值小数点后两位,小数点前的0不会显示。如:-0.05显示为-.05 不同显示单位的标示方式封装与设备中,选取传感器上各自的标示或填入空白的标示。 勿使静态或动态的过压超过给定的过载压力。 任何高于爆破压力的瞬时压力都会损伤设备(损伤危险)!
6操作模式 6.1 运行模式(Run mode) 正常操作模式。 当所需电压已经提供时,设备处于运行模式。根据设定参数监视并产生输出信号。 显示屏指示当前系统压力(见11.1节)。 红色发光二极管指示输出的状态切换。 6.2 显示模式(Display mode) 参数指示和参数值设定。 按下Mode/Enter按键,设备进入可以读取参数值的显示模式。此时内部的传感、处理和输出功能仍然继续进行。 ●用Mode/Enter按键选取需要设定的参数; ●按下Set按键,相应的参数值会显示15秒。再经过15秒设备返回运行模式。 6.3 编程模式(Programming mode) 参数值的设定。 看见参数值时,按住Set键5秒以上,设备进入编程模式。Set键改变参数值,按下Mode/Enter键确定新的参数值。该模式期间设备仍将按之前的参数继续进行感应、处理和输出计算,直到新的参数值确定。如果15秒内未按下任何按键,设备将返回运行模式。 7安装 装配和拆除传感器时,确定系统没有承受压力。 7.1 工艺适配器 该设备可采用单独购买的ifm适配器作为其附件。 首先将适配器(C)安装到传感器上,然后传感器+适配器通过螺母、钳位法兰或其他类似原件(B)装上工艺连接件。 (图)P.23
人形机器人机器人第十六节课
人形机器人第十六节课 一,科普知识 1,二进制,八进制,十进制,十六进制的概念 1)二进制 二进制是计算技术中广泛采用的一种数制。二进制数据是用0和1两个数码来表示的数。它的基数为2,进位规则是“逢二进一”,借位规则是“借一当二”,由18世纪德国数理哲学大师莱布尼兹发现。当前的计算机系统使用的基本上是二进制系统,数据在计算机中主要是以补码的形式存储的。计算机中的二进制则是一个非常微小的开关,用1来表示“开”,0来表示“关”。 20世纪被称作第三次科技革命的重要标志之一的计算机的发明与应用,因为数字计算机只能识别和处理由‘0’.‘1’符号串组成的代码。其运算模式正是二进制。19世纪爱尔兰逻辑学家乔治布尔对逻辑命题的思考过程转化为对符号"0''.''1''的某种代数演算,二进制是逢2进位的进位制。0、1是基本算符。因为它只使用0、1两个数字符号,非常简单方便,易于用电子方式实现。 2)八进制 八进制,Octal,缩写OCT或O,一种以8为基数的计数法,采用0,1,2,3,4,5,6,7八个数字,逢八进1。一些编程语言中常常以数字0开始表明该数字是八进制。八进制的数和二进制数可以按位对应(八进制一位对应二进制三位),因此常应用在计算机语言中。3)十进制
600,3/5,-7.99……看着这些耳熟能详的数字,你有没有想太多呢?其实这都是全世界通用的十进制,即1.满十进一,满二十进二,以此类推……2.按权展开,第一位权为10^0,第二位10^1……以此类推,第N位10^(N-1),该数的数值等于每位位的数值*该位对应的权值之和。 人类算数采用十进制,可能跟人类有十根手指有关。亚里士多德称人类普遍使用十进制,只不过是绝大多数人生来就有10根手指这样一个解剖学事实的结果。实际上,在古代世界独立开发的有文字的记数体系中,除了巴比伦文明的楔形数字为60进制,玛雅数字为20进制外,几乎全部为十进制。只不过,这些十进制记数体系并不是按位的。 4)十六进制 十六进制(英文名称:Hexadecimal),是计算机中数据的一种表示方法。同我们日常生活中的表示法不一样。它由0-9,A-F组成,字母不区分大小写。与10进制的对应关系是:0-9对应0-9;A-F对应10-15;N 进制的数可以用0~(N-1)的数表示,超过9的用字母A-F。 2,相互转换的计算方法 二进制数和十进制数的相互转换 例如:十进制4 转换成二进制的数是1 0 0 二、编制机器人的动作 模拟机器人蹲起的动作。
MP3V5050压力传感器说明书
MP3V5050Rev 0, 08/2008 Freescale Semiconductor Technical Data Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and Calibrated The MP3V5050 series piezoresistive transducer is a state-of-the-art monolithic silicon pressure sensor designed for a wide range of applications, but particularly those employing a microcontroller or microprocessor with A/D inputs. This patented, single element transducer combines advanced micromachining techniques, thin-film metallization, and bipolar processing to provide an accurate, high level analog output signal that is proportional to the applied pressure.Features ? 2.5% Maximum Error over 0° to 85°C ?Ideally suited for Microprocessor or Microcontroller-Based Systems ?Temperature Compensated Over –40° to +125°C ?Patented Silicon Shear Stress Strain Gauge ?Durable Epoxy Small Outline Package (SOP)?Easy-to-Use Chip Carrier Option ?Multiple Porting Options for Design Flexibility ? Barbed Side Ports for Robust Tube Connection ORDERING INFORMATION Device Type Options Case No.MP3V Series Order No.Packing Options Device Marking SMALL OUTLINE PACKAGE (MP3V5050 SERIES) Ported Elements Side Port 1369MP3V5050GP Trays MP3V5050G Dual Port 1351MP3V5050DP Trays MP3V5050G Axial Port 482A MP3V5050GC6U Rails MP3V5050G 482A MP3V5050GC6T1 Tape & Reel MP3V5050G MP3V5050 SERIES INTEGRATED PRESSURE SENSOR 0 to 50 kPa (0 to 7.25 psi)0.06 to 2.82 V Output SMALL OUTLINE PACKAGE PIN NUMBERS (1) 1.Pins 1, 5, 6, 7, and 8 are internal device connections. Do not connect to external circuitry or ground. Pin 1 is noted by the notch in the lead. 1N/C 5N/C 2V S 6N/C 3Gnd 7N/C 4 V out 8 N/C
如何解析宝马氧传感器闭环控制和诊断方法
看宝马技术经理如何解析氧传感器闭环控制和诊断方法 2016-01-17 技术经理道陆福星 技术交流微信:h751074007 氧传感器的作用: 氧传感器的作用是监测尾气中氧的浓度,并将信息反馈给控制单元修正喷油量,实现发动机的闭环控制,减少有害气体的排放。随着发动机电控技术的发展,普通的4线制氧传感器由于其检测范围的局限性,已不能满足汽车工况的需求,因而宽频氧传感器在汽车上的应用越来越广泛。 宽频氧传感器的作用: 6线宽频氧传感器的作用是监测尾气中氧的浓度,并将信息反馈给控制单元修正喷油量,实现发动机的闭环控制,减少有害气体的排放。随着发动机电控技术的发展,普通的4线制氧传感器由于其检测范围的局限性,已不能满足汽车工况的需求,因而宽频氧传感器在汽车上的应用越来越广泛。 其次,现代汽车为了省油,都趋向与稀薄燃烧,也就是空燃比从10至20,相当于过量空气系数从0.686至1.405的宽范围,这样,原有的氧传感器就无法适应,于是宽带氧传感器诞生了,这就是6线的氧传感器。 氧传感器4线和6线的不同: 4线氧传感器有:加热线2根和信号线2根,加热线为12v和0v 信号线为0.1---0.9V跳变10秒变化8次以上。6线氧传感器有:加热线2根,跳跃信号线2根,泵电流信号2根。泵电流信号是电脑通过施加给泵氧元件的电流来检测混合气浓度的。 通过单元泵工作,可将尾气中的氧吸入测量室,单元泵工作所用电流,即为传递给控制单元的电信号。控制氧传感器的电压值在450mv附近。 闭环: 闭环(Close Loop)闭环是指发动机ECU根据氧传感器的反馈信号不断地调整混合气的空燃比,使其值符合规定。根据氧传感器的信号波形可以判断系统是否已经进入闭环控制状态。起动机起动后氧传感器输出的信号电压先逐渐升高到450 mV,然后进入升高和下降(混合气变浓和变稀)的循环,后者表示燃油反馈控制系统进入了闭环状态。当然,只有当氧传感器在无故障的时候氧传感器的信号电压波形才能反映燃油反馈控制系统的状况;如果氧传感器有故障,那么它所产生的波形就不反映燃油反馈控制系统的状况。
数字压力传感器使用手册
CY200数字压力传感器 使用手册 成都泰斯特电子信息有限公司 2014年4月
目录 1.CY200数字压力传感器简介 ................................................. - 1 - 2.CY200结构及附件 (2) 2.1. CY200结构及尺寸 (2) 2.2. 485-USB转换器 (2) 2.3. Pin5-Pin5连接线 (3) 2.4. 485-20集线器 (3) 3.CY200的连接方式 (3) 4.压力测试软件 (5) 4.1. 网络设置 (5) 4.2. 网线定义 (6) 4.3. 驱动的安装 (6) 4.4. 插件程序安装 (9) 4.5. Smart Sensor4.10 应用程序安装 (11) 5.Smart Sensor使用说明 (14) 5.1. 传感器连接 (14) 5.2. 采集参数设置 (16) 5.3. 传感器参数设置 (16) 5.4. 观察曲线分析 (17) 6.常用快捷功能键 (18) 7.数据查看、保存及回放 (23) 7.1. 观察传感器即时值 (23) 7.2. 数据保存及其他 (23) 8.附录_Smart Sensor压力测试系统 (26) 8.1. 附录1 二进制数据.stst文件格式 (26) 8.2. 附录2 文本文件格式 (26)
1.CY200数字压力传感器简介 CY200系列智能数字压力传感器用目前国际最新的SOC(单片机系统)芯片,结合MEMS加工的压阻硅晶体为敏感器件,充分利用微处理器的处理和存储能力,实现对敏感部件拾取的压力信号进行滤波、放大、A/D转换、校正等功能,直接输出可显示存储的数字信号。 CY200系列智能数字压力传感器融合了高精密度、高稳定度参考源技术、信号采集处理、通讯、总线等一系列的高新技术,为成都泰斯特公司又一自主研制成功的的高技术含量产品。 ●数字化:数字量输出,无需其它数据采集设备,直接在计算机上读出压力值; ●智能化:内置电子表单,设备编号、量程、校正参数自动加载; ●高精度:24位A/D转换器; ●便捷:485总线,长线传输,USB即插即用,同时拥有; ●网络化:自动寻址,TCP/IP协议组成网络化压力测试系统; ●使用灵活:单只、多只、远距离传输、分布式网络等都有解决方案; ●支持专用:通讯协议开放,自有技术,支持专用开发。 CY200智能数字压力传感器系列下,有细分型号,如CY201、CY205,未特别标明处,本说明书均适用。
人形机器人
人型机器人的发展现状与未来展望
什么是人形机器人 人形机器人,又称仿人机器人,是具有人形的机器人。1886年法国作家利尔亚当在他的小说《未来夏娃》中将外表像人的机器起名为“安德罗丁”(android),就是一种人形机器人。按照利尔亚描述,人形机器人由4部分组成:生命系统(平衡、步行、发声、身体摆动、感觉、表情、调节运动等);造型解质(关节能自由运动的金属覆盖体,一种盔甲);肌肉(在上述盔甲上有肉体、静脉、性别等身体的各种形态); 人造皮肤(含有肤色、轮廓、头发、视觉、牙齿、手爪等)。
构成及特点 现代的人形机器人一种智能化机器人,例如 ROBOT·X人形机器人,在机器的各活动关节配置有多达17个伺服器,具有17个自由度,特显灵活,更能完成诸如手臂后摆90度的高难度动作。它还配以设计优良的控制系统,通过自身智能编程软件便能自动地完成整套动作。 人形机器人随音乐起舞、行走、起卧、武术表演、翻跟斗等杂技以及各种奥运竞赛动作,。ROBOT·X人形机器人采用世界著名的日本FUTABA伺服器,具有高扭力、高转速、高稳定、反应灵敏、无抖动、转动角度大等优点,超快速高精度金属齿轮,耐冲击。
人形机器人集机、电、材料、计算机、传感器、控制技术等多门学科于一体,是一个国家高科技实力和发展水平的重要标志,因此,世界发达国家都不惜投入巨资进行开发研究。日、美英等国都在研制仿人形机器人方面做了大量的工作,并已取得突破性的进展。 日本本田公司于1997年10月推出了仿人形机器人P3,美国麻省理工学院研制出了仿人形机器人科戈(COG),德国和澳洲共同研制出了装有52个汽缸,身高2米、体重150公斤的大型机器人。 美国麻省理工学院研制出了一种有着像人一样眼睛的新型机器人,它能与人类进行交流,能对周围的环境做出回应,并能协助人类完成许多工作。2010年6月16日日本东京大学和大阪大学组成的科研小组向公众展示了一款仿真婴儿机器人,它就是新的一款人形机器人。这个名叫“野尾”的婴儿娃娃身高71厘米,在柔软的仿真皮肤下面共有600个传感器,可以做出伸手、转头等动作。当被拥抱时,忽闪着大眼睛好奇地看着世界,十分可爱。
PTP503压力传感器使用说明书
油压传感器,油压压力变送器,河南压力传感器 正负压压力变送器,恒压供水压力传感器,投入式液位变送器,防雷击液位变送器,锅炉压力传感器,微差压变送器,超高温压力传感器,超高压压力传感器,平膜压力传感器,防腐蚀压力变送器,通风管道压力变送器,高温微压变送器,空压机压力变送器,空调风压变送器,PY500智能数字压力控制仪表,动静态汽车称重设备,称重测力传感器 PTP503压力传感器/变送器采用全不锈钢封焊结构,具有良好的防潮能力及优异的介质兼容性。广泛用于工业设备、水利、化工、医疗、电力、空调、金刚石压机、冶金、车辆制动、楼宇供水等压力测量与控制。 量程:0~1~150(MPa) 综合精度:0.2%FS、0.5%FS、1.0%FS 输出信号:4~20mA(二线制)、0~5V、1~5V、0~10V(三线制) 供电电压:24DCV(9~36DCV) 介质温度:-20~85~150℃ 环境温度:常温(-20~85℃) 负载电阻:电流输出型:最大800Ω;电压输出型:大于50KΩ 绝缘电阻:大于2000MΩ(100VDC 密封等级:IP65 长期稳定性能:0.1%FS/年 振动影响:在机械振动频率20Hz~1000Hz内,输出变化小于0.1%FS 电气接口(信号接口):四芯屏蔽线、四芯航空接插件、紧线螺母 机械连接(螺纹接口):1/2-20UNF、M14×1.5、M20×1.5、M22×1.5等,其它螺纹可依据客户要求设计
产品名称:PY602压力温度仪表 规格: 产品备注:数显压力温度控制仪表|智能压力温度表|佛山市博润测控仪表有限公司 产品说明 PY602数显压力-温度控制仪表 产品特点及结构: 具有整机体积小、重量轻、耗电省、功能齐全、工作可靠、使用方便灵活,配用我公司PT100-系列高温熔体压力传感器或常温压力传感器,作为高精度压力测量与控制,可广泛地使用于液压、石油、塑料、橡胶、印染、纺织等行业的压力显示和自动化控制场合,还可与其他厂家的电阻应变式压力传感器配套使用;可以设定上下限值报警,具有发光管报警指示、继电器触点输出控制外部执行机构;具有高精度的电压输出模块、电流输出模块、继电器输出控制模块以及通讯模块供用户选择 主要技术参数: 显示器:双层四位高亮度绿色和红色发光数码管 显示分辨率:0001 显示数值范围:-001~-999~0001~9999Mpa(小数点可变),温度:000.1-400.0 仪表精度:0.25%FS±1位 压力输入信号:2mV/V、3.3mV/V、4-20mA、0-5VDC、0-10DC(定货时说明) 温度输入信号:J、K、E型热电偶 采样速度:20次/秒 输出控制:与满量程信号成线性的电压或电流输出;RS232;RS485 报警范围:-001~-999~0001~9999Mpa(小数点可变) 效准指示:显示传感器满量程80%值(传感器应空载),效准指示(CAE)亮 使用温度及湿度:0-55℃,≤80%RH 电源要求:85-265VAC50Hz-60Hz 外型尺寸:96×96×100mm 开孔尺寸:92×92mm
基于stm32的人形机器人制作
摘要: 变形机器人是机器人领域中新兴起的一个研究方向,同时也是当前机器人学研究领域的一个热点和难点。 本课题参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型。基于机器人结构设计,详细探讨本项目变形机器人人车变形过程,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人研究局限,推进本领域关键技术的突破。 本文我们主要对机电一体化产品-变形金刚机器人进行了系统设计,该变形机器人旨在满足四五岁儿童对于变形金刚机器人玩具的需求,可在战车和机器人之间变换,并且各变形处的机构变换设计巧妙,变换的多变性、趣味性和实用性都非常高,在战车和变形后机器人的外观上极为逼真、酷炫,对儿童极具吸引力。 我们首先对市场前景进行了调查和分析,之后查阅相关资料并进行分析,随后进行机器人方案设计及具体的机械结构设计,并绘制机器人总装图和关键零部件图,然后进行传感与控制方案设计,包括硬件与软件设计,试验测试,最后编制课程设计说明书。本文对于硬件电路的连接和软件控制方面进行了详细的阐明,完成变形金刚机器人变形、行走的功能,并实现无线通讯功能。
目录 第一章方案设计 (6) 1 机械结构方案设计 (6) 2 驱动方案选择 (7) 2.1 电机的选择 (7) 3 传感器的选择 (7) 4 结构的合理性和参数的合理性 (8) 第二章动作的总体规划详细方案 (9) 1 人形态下的行走设计 (9) 2 车形态下的运动设计 (9) 3 人车转换的变形设计 (9) 第三章软件系统设计 (10) 1 软件系统总体方案 (10) 2 控制方案与流程 (11) 第四章程序 (12) 第五章项目心得 (14)
氧传感器的功能及工作原理全解
氧传感器的功能及工作原理 氧传感器的功能 测定发动机排气中氧气含量,确定汽油与空气是否完全燃烧。电子控制器根据这一信息实现以过量空气系数λ=1为目标的闭环控制,以确保三元催化转化器对排气中H C、CO和NOX三种污染物都有最大的转化效率。 工作原理 氧传感器的工作原理与干电池相似,传感器中的氧化锆元素起类似电解液的作用,其基本工作原理是:在一定条件下(高温和铂催化),利用氧化锆骨外两侧的氧浓度差,产生电位差,且浓度差越大,电位差越大。大气中氧的含量为21%,浓混合气燃烧后的废气实际上不含氧,稀混合气燃烧后生成的废气或因缺火产生的废气中含有较多的氧,但仍比大气中的氧少得多。 特点 抗铅;较少依赖于排气温度;起动后迅速进入闭环控制。 氧传感器的常见故障 氧传感器中毒 氧传感器中毒是经常出现的且较难防治的一种故障,尤其是经常使用含铅汽油的汽车,即使是新的氧传感器,也只能工作几千公里。如果只是轻微的铅中毒,接着使用一箱不含铅的汽油,就能消除氧传感器表面的铅,使其恢复正常工作。但往往由于过高的排气温度,而使铅侵入其内部,阻碍了氧离子的扩散,使氧传感器失效,这时就只能更换了。 积碳 由于发动机燃烧不好,在氧传感器表面形成积碳,或氧传感器内部进入了油污或尘埃等沉积物,会阻碍或阻塞外部空气进入氧传感器内部,使氧传感器输出的信号失准,ECU不能及时地修正空燃比。产生积碳,主要表现为油耗上升,排放浓度明显增加。此时,若将沉积物清除,就会恢复正常工作。 氧传感器陶瓷碎裂 氧传感器的陶瓷硬而脆,用硬物敲击或用强烈气流吹洗,都可能使其碎裂而失效。因此,处理时要特别小心,发现问题及时更换。 加热器电阻丝烧断
汽车氧传感器手册
汽车氧传感器手册 倍速智能氧传感器部门制作 2015年8月
目录INDEX 一、什么是汽车氧传感器 二、汽车氧传感器的作用 三、汽车氧传感器的分类 四、汽车氧传感器易出现的问题 五、汽车氧传感器的维修保养 六、汽车氧传感器的市场状况
一、什么是汽车氧传感器 汽车氧传感器也称气体浓度传感器,一般安装在排气歧管、前排气管内、后排气管上,是发动机电控系统中一个非常重要的的传感器,其功能是通过监测排气中氧离子的含量来获得混合气的空燃比信号,并将空燃比信号转变成电子信号输入发动机ECU。ECU根据氧传感器信号对喷油时间进行修正,实现空燃比反馈控制(闭环控制),从而将空燃比控制在14.7左右(过量空气系数为0.98~1.02),使发动机得到最佳浓度的混合气,从而达到降低有害气体排放和节油的目的。 二、汽车氧传感器的作用 汽车氧传感器对汽车电喷系统的正常工作起着非常重要的作用。汽车电子控制燃油喷射发动机正常运转和尾气排放的有效控制起着至关重要的作用,一旦氧传感器及其连接线路出现故障,不但会使排放超标,还会使发动机工况恶化,导致怠速熄火、发动机运转失准等各种故障。因此,适时地对氧传感器进行监测和观察,对保证汽车在良好状态下运行很重要。 三、汽车氧传感器的分类
目前,汽车发动机燃油喷射系统采用的氧传感器分为氧化锆型传感器和氧化钛型传感器俩中。氧化锆型传感器又分为加热型和非加热型,氧化钛型传感器一般都为加热型。由于氧化锆型传感器价格便宜,且不易受到硅离子的腐蚀,因此大多汽车都采用氧化锆型传感器。 氧化锆和氧化钛等敏感材料在高温时与废气中的氧发生反应,输出微弱的电压信号。随着废气中含氧量的不同,产生和输出的电压值不同,从而对废气中氧的含量进行监测。 以氧化锆式传感器为例,传感器内侧通大气,外侧暴露在排气管中,高温时(400℃以上),若氧化锆内表面处气体中所含氧的浓度,与外表面处气体所含氧的浓度有很大差别,氧化锆元件内、外侧两极间就产生一个电压。 当混合气浓度较稀时,排气中氧的含量较高,传感器元件内、外侧浓度差别很小,氧化锆传感器产生的电压低(接近0伏);反之,混合气过浓,在排气中几乎没有氧,传感器内、外两侧氧的浓度相差很大,氧化锆元件就产生高电压(约1.0伏)。 这样,通过监测废气中氧的含量,进而监测到可燃混合气中空气与汽油浓度的比例变化。 ECU就可以根据氧气浓度的大小,决定混合气体的配比。 废气中氧气浓度高。废气中氧气的百分比很大时,ECU将据此判定空燃比大,即混合气很稀。ECU内氧传感器不断得到