超精密滚珠丝杠进给系统谐响应的有限元分析

第6期2011年6月
组合机床与自动化加工技术
Modular Machine Tool &Automatic Manufacturing Technique
No.6Jun.2011
文章编号:1001-2265(2011)06-0020-03
收稿日期:2010-12-16;修回日期:2011-02-23
*基金项目:南昌航空大学研究生创新基金(YC2009025)
作者简介:侯秉铎(1983—),男,黑龙江肇东人,南昌航空大学机械电子工程在读硕士,研究方向为数字化设计与制造,
(E -mail )houbd@126.com 。
超精密滚珠丝杠进给系统谐响应的有限元分析
*
侯秉铎,许
瑛,彭浪草,杨俊虎
(南昌航空大学航空制造工程学院,江西南昌330063)
摘要:以超精密滚珠丝杠进给系统试验台为研究对象,使用有限元法对其进给系统的工作台受到轴
向正弦力载荷时系统的谐响应进行了分析。由于目前传统的滚珠丝杠进给系统有限元模型不能准确的分析电机轴输出端的转矩动载荷对进给系统产生的谐响应,据此提出了一种新的进给系统有限元模型,保证了其谐响应分析的准确性。并根据分析结果可知,在超精密滚珠丝杠进给系统中,电机轴输出端的转矩动载荷会对进给系统的定位精度产生不可忽视的影响。关键词:超精密滚珠丝杠进给系统;谐响应分析;有限元;频率;振幅中图分类号:TH16;TG65
文献标识码:A
Uitra-precision Ball-screw Feed System Harmonic Response of the Finite Element Analysis
HOU Bing-duo ,XU Ying ,PENG Lang-cao ,YANG Jun-hu (Nanchang Hangkong University ,Jiang Xi Nanchang 330063,China )
Abstract :Uitra -precision ball -screw f eed system test stand as the research object,the use of f inite ele -m ent m ethod into the system to its bench strength by axial sinusoidal harm onic load,the system is ana -lyzed.The traditional ball screws due to the current f inite elem ent m odel of the f eed system is not an ac -curate analysis of the output torque of the m otor shaf t of the f eed system dynam ic load generated har -m onic response,this paper presents a new f inite elem ent m odel of the f eed system,ensure The harm onic
analysis of the accuracy.And the analysis results indicate that in ultra -precision ball screw f eed system,the m otor shaf t torque output into the dynam ic load would be the positioning accuracy of the system of production can not be ignored.
Key words :ultra -precision ball -screw f eed system;harm onic;analysis;f requency;am plitude
0引言
旋转电机+滚珠丝杠是超精密加工机床进给系
统中最常用的传动装置,使用C0级滚珠丝杠的超精密滚珠丝杠进给系统可以实现最优10nm 的定位精度[1]
。在这种精度条件下,滚珠丝杠进给系统在外界激励状态下的谐响应是必须要考虑的一个问题。文中以超精密滚珠丝杠进给系统试验台为研究对
象,使用ANSYS 有限元软件[2-3]
为分析工具,得到了工作台受到轴向正弦力载荷时系统的谐响应曲线。并针对目前传统的滚珠丝杠进给系统有限元模型不能准确的分析电机轴输出端的转矩动载荷对系统产生谐响应的不足,提出了一种新的进给系统有限元
模型,保证了其谐响应分析的准确性。
1系统简述
超精密滚珠丝杠进给系统试验台简图如图1所
示。系统采用的滚珠丝杠为C0级超精密滚珠丝杠,其导程、直径和有效螺纹长度分别为3mm 、
12mm 和300mm ,滚珠丝杠副的轴向刚度为320000N /mm 。滚珠导轨为超精密直线滚珠导轨,精度为P3等级,导轨长度为400mm 。滚珠丝杠两端采用精密滚珠轴承支撑单元,联轴器使用低惯量超高刚度金属板簧式连接器。电机及减速器分别采用DC 伺服电机和超精密减速器。
实验台工作时,伺服电机带动滚珠丝杠转动,再
通过丝杠螺母带动工作台实现直线进给。其进给系
统的定位精度可以达到50nm
。
图1超精密滚珠丝杠进给系统试验台简图
2系统的有限元建模
根据ANSYS 软件的特点,如果按照实际结构进
行建模,
则网格划分后计算规模过于庞大,并且会出现大量的畸形单元。所以对系统中的丝杠和螺母结
合面、导轨和滑块结合面、以及丝杠两端的轴承结合面进行了简化
[4-5]
。如把丝杠和螺母之间的螺旋滚
道部分简化为垂直于丝杠轴线的平面沟槽,
其余部分简化为圆柱面,滚珠向轴向投影简化为一个圆筒。如图2和图3所示分别为滚珠丝杠副简化前后的有限元模型
。
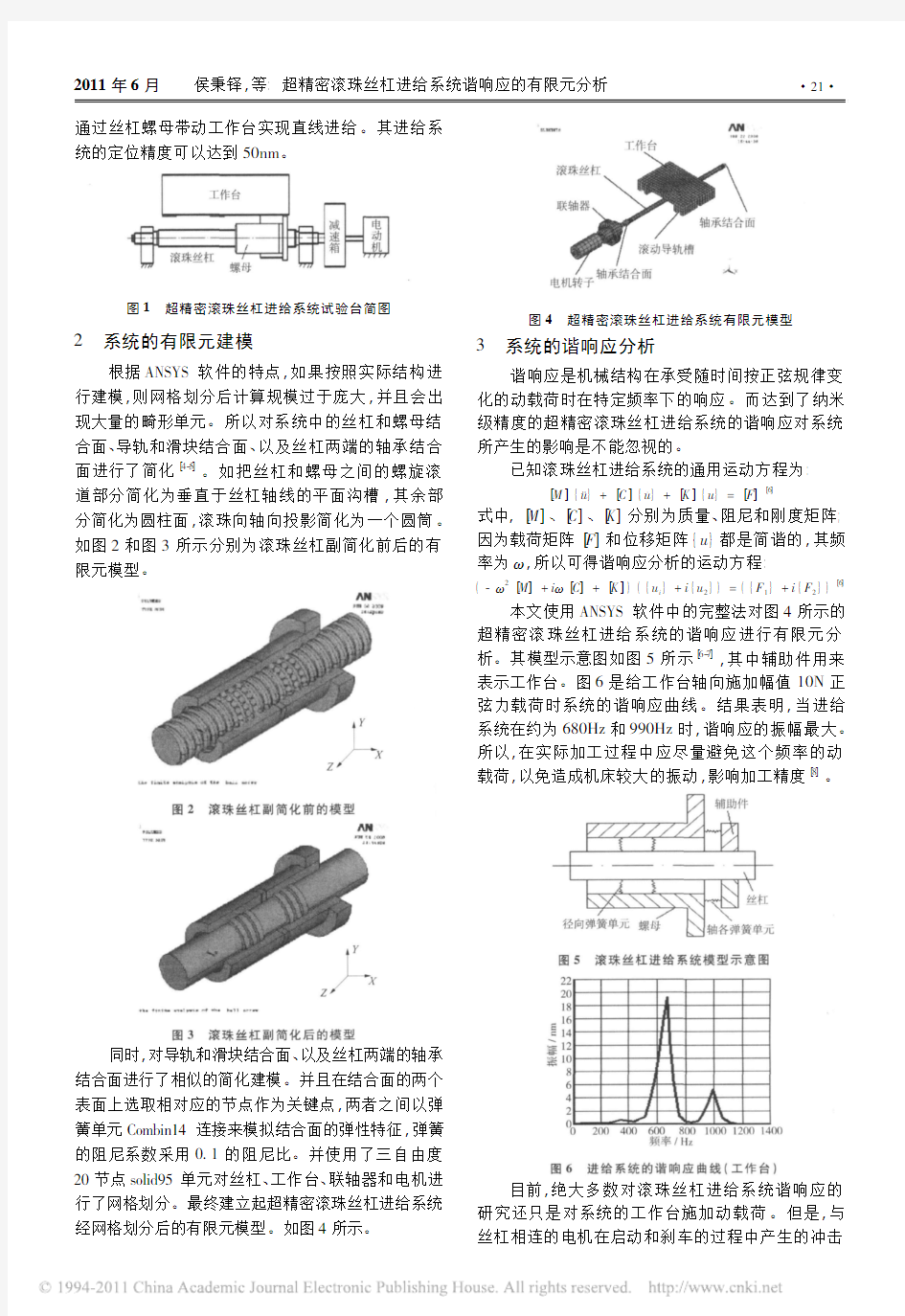
同时,对导轨和滑块结合面、以及丝杠两端的轴承
结合面进行了相似的简化建模。并且在结合面的两个表面上选取相对应的节点作为关键点,两者之间以弹簧单元Combin14连接来模拟结合面的弹性特征,弹簧的阻尼系数采用0.1的阻尼比。并使用了三自由度20节点solid95单元对丝杠、工作台、联轴器和电机进行了网格划分。最终建立起超精密滚珠丝杠进给系统经网格划分后的有限元模型。如图4所示
。
图4超精密滚珠丝杠进给系统有限元模型
3系统的谐响应分析
谐响应是机械结构在承受随时间按正弦规律变
化的动载荷时在特定频率下的响应。而达到了纳米级精度的超精密滚珠丝杠进给系统的谐响应对系统所产生的影响是不能忽视的。
已知滚珠丝杠进给系统的通用运动方程为:
[M ]{七u }+[C ]{ u }+[K ]{u }=[F ]
[6]
式中,[M ]、[C ]、[K ]分别为质量、阻尼和刚度矩阵;
因为载荷矩阵[F ]和位移矩阵{u }都是简谐的,其频
率为ω,所以可得谐响应分析的运动方程:
(-ω2[M ]+i ω[C ]+[K ])({u i }+i {u 2})=({F 1}+i {F 2})[6]
本文使用ANSYS 软件中的完整法对图4所示的超精密滚珠丝杠进给系统的谐响应进行有限元分
析。其模型示意图如图5所示[6-7],其中辅助件用来
表示工作台。图6是给工作台轴向施加幅值10N 正弦力载荷时系统的谐响应曲线。结果表明,当进给系统在约为680Hz 和990Hz 时,谐响应的振幅最大。所以,在实际加工过程中应尽量避免这个频率的动
载荷,
以免造成机床较大的振动,影响加工精度[8]
。目前,绝大多数对滚珠丝杠进给系统谐响应的研究还只是对系统的工作台施加动载荷。但是,与丝杠相连的电机在启动和刹车的过程中产生的冲击
·
12·2011年6月侯秉铎,等:超精密滚珠丝杠进给系统谐响应的有限元分析
以及电机轴输出端的振荡特性也会导致整个进给系统产生振荡。虽然在普通机床的进给系统中,这种
振荡可以忽略不计,
但是对精度达到了纳米级的超精密滚珠丝杠进给系统来说,这种振荡则必须要考虑。这种情况下,就需要对电机轴的输出端施加一定的转矩动载荷来进行滚珠丝杠进给系统的谐响应分析。由于图5所示传统的滚珠丝杠进给系统模型无法正确描述其传动关系,并且有限元软件又没有提供合适的单元,所以这种谐响应分析在目前是一个难点。文中根据谐响应运动方程及ANSYS 中弹簧单元的特点,提出了一种新的滚珠丝杠进给系统有限元分析的模型,该模型可以正确的分析电机轴输出端施加的转矩动载荷对整个进给系统所产生的谐响应。如图7所示
。
图7新的滚珠丝杠进给系统模型示意图
在图7中,辅助件用来表示电机轴。图8是给电
机轴轴向施加10N 的正弦力矩信号时谐响应分析的结果。由计算结果可知,当进给系统在约为650Hz 和1050Hz 时,谐响应的振幅最大。此时的振幅约为2.1nm 。可见,在精度达到纳米等级的超精密滚珠丝杠进给系统中,这种振荡是不可忽视的。所以,在系统进给的过程中,应尽量使电机轴输出的转矩动载荷避开这个频率,从而提高系统的定位精度
。
图8进给系统的谐响应分析(电机轴)
4结束语
首先使用了有限元法对超精密滚珠丝杠进给系统进行了谐响应分析。得到了进给系统的工作台轴向受到正弦力载荷时系统的谐响应曲线。这为超精密机床在加工时避免振动过大,提高加工精度提供了一定的理论依据。
其次,由于目前传统的滚珠丝杠进给系统有限元模型不能准确的分析电机轴输出端的转矩动载荷对进给系统产生的谐响应,对此,建立了一种新的滚珠丝杠进给系统的有限元模型,保证了其谐响应分析的准确性。这为对滚珠丝杠进给系统进行准确的动力学有限元分析提供了一种新的手段。
最后可知,在超精密滚珠丝杠进给系统中,电机轴输出端的转矩动载荷会对进给系统的定位精度产生不可忽视的影响。从而提出了一种通过调整电机轴输出端的转矩动载荷来提高超精密滚珠丝杠进给系统定位精度的新思路。
[参考文献]
[1]卢礼华,郭永丰,下河边明,等.滚珠丝杠在超精密定位
中的应用[
J ].航空精密制造技术,2007(2):21-24.[2]张朝晖,李树奎.ANSYS 11.0有限元分析理论与工程应
用[
M ].北京:电子工业出版社,2008.[3]Saeed Moaveni 著,王松,董春敏,金云平,等,译.有限元
分析-ANSYS 理论与应用(2版)[M ].北京:电子工业出版社,
2005.[4]宁怀明,王彦红.THK 滚珠丝杠基于ANSYS 的动态分析
[J ].煤炭技术,2010(7):18-19.
[5]傅中裕,杨晓京.ANSYS 的丝杠模态分析[
J ].机械制造与研究,
2004(6):37-39.[6]安琦瑜,冯平法,郁鼎文.基于FEM 的滚珠丝杠进给系
统动态性能分析[J ].制造技术与机床,2005(10):85-88.
[7]巫少龙,张元祥.基于ANSYS Workbench 的高速电主轴
动力学特性分析[J ].组合机床与自动化加工技术,2010(9):20-26.
[8]李小彭,刘春时,马晓波,等.数控机床加工精度提高技
术的进展及其存在的问题[J ].组合机床与自动化加工技术,
2010(11):1-4.(编辑
赵蓉)
(上接第19页)
[参考文献]
[1]刘雄伟,等.数控加工理论与编程技术[
M ].北京:机械工业出版社,
2003.[2]周瑞红,成群林,穆英娟,等.基于Pro /E 的多轴联动数
控加工进给速度控制技术研究[J ].制造技术与机床,2009(1):123-125.
[3]唐清春,吴汉夫.叶片五坐标联动加工后置处理开发及
应用[
J ].汽轮机技术,2009,51(6):475-477.[4]西门子Sinumerk 840D 循环编程手册[M ].SIEMENS 公
司,
2008.[5]王宏莲.Sinumerk 802D 孔加工固定循环后置处理分析
与开发[
J ].制造技术与机床,2009(10):157-159.(编辑
李秀敏)
·
22·组合机床与自动化加工技术
第6期
滚珠丝杠的设计与计算
一、滚珠丝杠的特长 1、1驱动扭矩仅为滑动丝杠的1/3 滚珠丝杠是滚珠丝杠与螺母间的螺纹沟槽做滚动运动,因此可获得高效率,与过去的滑动丝杠相比,驱动扭矩仅为1/3以下(图1与2)。从而,不仅可将旋转运动变为直线运动,而且可以容易地将直线运动变成旋转运动。 图1:正效率(旋转→直线)图2:反效率(直线→旋转) 1、1、1导程角的计算法 ……………………………………( 1 ) β:导程角(度) d p:滚珠中心直径(mm) ρh:进给丝杠的导程(mm)
1、12推力与扭矩的关系 当施加推力或扭矩时,所产生的扭矩或推力可用(2)~(4)式计算。(1)获得所需推力的驱动扭矩 T:驱动扭矩 Fa:导向面的摩擦阻力 Fa=μ×mg μ:导向面的摩擦系数 g:重力加速度( 9.8m/s2) m:运送物的质量( kg ) ρh:进给丝杠的导程( mm ) η:进给丝杠的正效率(图1) (2)施加扭矩时产生的推力 Fa:产生的推力( N ) T:驱动扭矩(N mm ) ρh:进给丝杠的导程( mm ) η:进给丝杠的正效率(图1)
(3)施加推力时产生的扭矩 T:驱动扭矩(N mm ) Fa:产生的推力( N ) ρh:进给丝杠的导程( mm ) η:进给丝杠的正效率(图2) 1、1、3驱动扭矩的计算例 用有效直径是:32mm,导程:10mm(导程角:5O41’的丝杠,运送质量为500Kg的物体,其所需的扭矩如下 (1)滚动导向(μ=0.003) 滚珠丝杠及(μ=0.003,效率η=0.96) 导向面的摩擦阻力 Fa=0.003×500×9.8=14.7N 驱动扭矩 (2)滚动导向(μ=0.003) 滚珠丝杠及(μ=0.2,效率η=0.32)
滚珠丝杆传动优点
滚珠丝杆传动机构的性能和特点 滚珠丝杠由螺杆、螺母、钢球、预压片、反向器、防尘器组成。是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。当滚珠丝杠作为主动 体时,螺母就会随丝杆的转动角度按照对应规格的导程转化成直线运动,被动工件可以通过螺母座和螺母连接,从而实现对应的直线运动。 常用的循环方式有两种:外循环和内循环。与丝杠脱离接触的称为外循环。外循环是滚珠在循环过程结束后通过螺母外表面的螺旋槽或插管返回丝杠螺母间重新进入循环。外循环滚珠丝杠外循环结构和制造工艺简单,使用广泛。;始终与丝杠保持接触的称为内循环。内循环均采用反向器实现滚珠循环。传动机构的性能 与滑动丝杠副相比驱动力矩为1/3 由于滚珠丝杠副的丝杠轴与丝杠螺母之间有很多滚珠在做滚动运动,所以能得到较高的运动效率。与过去的滑动丝杠副相比驱动力矩达到 1/3以下,即达到同样运动结果所需的动力为使用滚动丝杠副的1/3。在省电方面很有帮助。传动效率高 滚珠丝杠副的传动效率高达90%~98%,为滑动丝杠副的2~4倍,能高效地将扭力转化为推力,或将推力转化为扭力。传动灵敏平稳 滚珠丝杠副为点接触滚动摩擦,摩擦阻力小、灵敏度好、启动时无颤动、低速时无爬行,可μ级控制微量进给。定位精度高 滚珠丝杠副传动过程中温升小、可预紧消除轴向游隙和初级弹性形变、
可对丝杠进行预拉伸以补偿热伸长,故可获得较高的定位精度和重复定位精度。精度保持性好 滚珠及滚道硬度达HRC58~63,滚道形状准确,滚动摩擦磨损极小,具有良好的精度保持性、可靠性和使用寿命。传动刚度高 滚珠丝杠副内外滚道均为偏心转角双圆弧面、在滚道间隙极小的时也能灵活传动。需要时加一定的预紧载荷则可消除轴向游隙和初级弹性形变以获得良好的刚性(此时使用寿命有所减少)。同步性能好 滚珠丝杠副因具有导程精度高、灵敏度好的特点,在需要同步传动的场合,用几套相同导程的滚珠丝杠副可获得良好的同步性能。无侧隙、刚性高 滚珠丝杠副可以加予压,由于予压力可使轴向间隙达到负值,进而得到较高的刚性(滚珠丝杠内通过给滚珠加予压力,在实际用于机械装置等时,由于滚珠的斥力可使丝母部的刚性增强)。高速进给可能 滚珠丝杠由于运动效率高、发热小、所以可实现高速进给(运动)。 滚珠丝杠副可用润滑来提高耐磨性及传动效率。润滑剂分为润滑油及润滑脂两大类。润滑油用机油、90~180号透平油或140号主轴油。润滑脂可采用锂基油脂。润滑脂加在螺纹滚道和安装螺母的壳体空间内,而润滑油通过壳体上的油孔注入螺母空间内。
滚珠丝杠副接触变形的有限元分析
文章编号:1004-2539(2010)12-0034-03 滚珠丝杠副接触变形的有限元分析 李东君 (南京交通职业技术学院机电工程系, 江苏南京 211188) 摘要 结合滚珠丝杠副的国内外研究状况,建立了滚珠与螺母滚道及丝杠滚道的分析简化模型和接触有限元模型,得到了螺母在外加轴向力作用下的轴向弹性变形数据,并对滚珠丝杠副轴向接触变形进行仿真,用有限元接触分析结果验证了分析简化模型的合理性,具有一定的理论价值和实际意义。 关键词 接触分析 有限元模型 Finite Element A nalysis of C ontact Deformation for Ball S crew Li Dongjun (Department of Electromechanical Engineeri ng,Nanjing Communication Ins ti tute of Tec hnology,Nanjing 211188,China) Abstract In combination with research situation of ball scre w at home and abroad,a ball scre w and nut race way and the race way model of analysis and contac t finite element model is established.The nut axial elastic deformation data under the applied a xial force is obtained and the simulation of ball screw axial contact defor mation is carried out.By using finite element contact analysis results,the rationality of simplify model is verified.It has a certain theoretical value and practical significance. Key words C ontact analysis Finite element model 0 引言 国外对滚珠丝杠副轴向静刚度做了很多研究,其中人们关注最多的是滚珠与螺母和丝杠接触区域满足赫兹接触条件下的接触刚度,并建立了滚珠丝杠副轴向静刚度的计算方法,国内许多学者对滚珠丝杠副的轴向接触刚度进行了广泛而深入的研究[1]61-84[2]230-232,但大部分企业对滚珠丝杠副轴向静刚度的了解并不多,滚珠丝杠副的轴向静刚度也一直没有被纳入滚珠丝杠副的检验标准之中,主要因为是对轴向接触刚度的理论分析过于复杂,涉及数值分析与计算,不适宜在工程实际中运用,而且到目前为止我国还没有滚珠丝杠副轴向静刚度的专用测试设备。 滚珠丝杠副滚珠与滚道的轴向接触刚度是影响滚珠丝杠副整体轴向静刚度的重要因素,赫兹接触理论被 广泛运用于两个弹性体的接触分析[3] ,研究表明赫兹接触理论同样适用于滚珠与丝杠,螺母的接触分析[1]19-22[4-5]。赫兹接触理论的主要结论是点接触的两个物体在负荷Q 的作用下,接触点将扩展成为一个接触面。 有限元法近年来在各种结构的接触分析问题中越来越得到广泛的运用[6-7],采用大型有限元软件进行接 触分析具有结果直观、易理解,运算速度快等优点,尤其 对复杂结构的接触问题有限元分析法的优势更明显。 1 有限元接触分析 接触的非线性行为极高,ANSYS 采用接触单元来模 拟接触问题,防止接触表面相互穿透,在接触表面之间传递接触应力。面面有限元接触分析的流程图如图1 图1 有限元接触分析的流程图 34 机械传动 2010年
滚珠丝杠的设计教学内容
滚珠丝杠的设计
滚珠丝杠的设计计算与选用 滚珠丝杠 滚珠丝杠是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。 滚珠丝杠由螺杆、螺母和滚珠组成。它的功能是将旋转运动转化成直线运动,这是滚珠螺丝的进一步延伸和发展,这项发展的重要意义就是将轴承从滚动动作变成滑动动作。由于具有很小的摩擦阻力,滚珠丝杠被广泛应用于各种工业设备和精密仪器。 滚珠丝杠是工具机和精密机械上最常使用的传动元件,其主要功能是将旋转运动转换成线性运动,或将扭矩转换成轴向反覆作用力,同时兼具高精度、可逆性和高效率的特点。 1)与滑动丝杠副相比驱动力矩为1/3 由于滚珠丝杠副的丝杠轴与丝母之间有很多滚珠在做滚动运动,所以能得到较高的运动效率。与过去的滑动丝杠副相比驱动力矩达到1/3以下,即达到同样运动结果所需的动力为使用滚动丝杠副的1/3。在省电方面很有帮助。 2)高精度的保证 滚珠丝杠副是用日本制造的世界最高水平的机械设备连贯生产出来的,特别是在研削、组装、检查各工序的工厂环境方面,对温度·湿度进行了严格的控制,由于完善的品质管理体制使精度得以充分保证。 3)微进给可能 滚珠丝杠副由于是利用滚珠运动,所以启动力矩极小,不会出现滑动运动那样的爬行现象,能保证实现精确的微进给。 4)无侧隙、刚性高 滚珠丝杠副可以加予压,由于予压力可使轴向间隙达到负值,进而得到较高的刚性(滚珠丝杠内通过给滚珠加予压力,在实际用于机械装置等时,由于滚珠的斥力可使丝母部的刚性增强)。 5)高速进给可能 滚珠丝杠由于运动效率高、发热小、所以可实现高速进给(运动)。
滚珠丝杠副特性 ?传动效率高 ?滚珠丝杠传动系统的传动效率高达90%~98%,为传统的滑动丝杠系统的2~4倍,如图1.1.1所示,所以能以较小的扭矩得到较大的推力,亦可由直线运动转为旋转运动(运动可逆)。 ?运动平稳 ?滚珠丝杠传动系统为点接触滚动运动,工作中摩擦阻力小、灵敏度高、启动时无颤动、低速时无爬行现象,因此可精密地控制微量进给。 ?高精度 ?滚珠丝杠传动系统运动中温升较小,并可预紧消除轴向间隙和对丝杠进行预拉伸以补偿热伸长,因此可以获得较高的定位精度和重复定位精 度。 ?高耐用性 ?钢球滚动接触处均经硬化(HRC58~63)处理,并经精密磨削,循环体系过程纯属滚动,相对对磨损甚微,故具有较高的使用寿命和精度保持 性。 ?同步性好 ?由于运动平稳、反应灵敏、无阻滞、无滑移,用几套相同的滚珠丝杠传动系统同时传动几个相同的部件或装置,可以获得很好的同步效果。 ?高可靠性
滚珠丝杠驱动扭矩及电机功率的计算
匀速运行,非精确计算可以套用以下公式:Ta=(Fa*I)/(2*3.14*n1) 式中 Ta:驱动扭矩kgf.mm; Fa:轴向负载N(Fa=F+μmg,F:丝杠的轴向切削力N,μ:导向件的综合摩擦系数,m:移动物体重量(工作台+工件)kg,g:9.8 ); I:丝杠导程mm; n1:进给丝杠的正效率。 计算举例: 假设工况:水平使用,伺服电机直接驱动,2005滚珠丝杠传动,25滚珠直线导轨承重和导向,理想安装,垂直均匀负载1000kg,求电机功率: Fa=F+μmg,设切削力不考虑,设综合摩擦系数μ=0.1,得Fa=0.1*1000*9.8=980N; Ta=(Fa*I)/(2*3.14*n1),设n1=0.94,得Ta=980*5/5.9032≈830N.mm=0.83N.M 根据这个得数,可以选择电机功率。以台湾产某品牌伺服为例,查样本得知,额定扭矩大于0.83N.M的伺服电机是400W。(200W是0.64N.M,小了。400W额定1.27N.M,是所需理论扭矩的1.5倍,满足要求) 当然咯,端部安装部分和滚珠丝杠螺母预压以及润滑不良会对系统产生静态扭矩,也称初始扭矩,实际选择是需要考虑的。另外,导向件的摩擦系数不能单计理论值,比如采用滚珠导轨,多套装配后的总摩擦系数一定大于样本参数。而且,该结果仅考虑驱动这个静止的负载,如果是机床工作台等设备,还要考虑各向切削力的影响。 若考虑加速情况,较为详细的计算可以参考以下公式(个人整理修正的,希望业内朋友指点): 水平使用滚珠丝杠驱动扭矩及电机功率计算: 实际驱动扭矩:T=(T1+T2)*e T:实际驱动扭矩; T1:等速时的扭矩; T2:加速时的扭矩; e:裕量系数。 等速时的驱动扭矩:T1=(Fa*I)/(2*3.14*n1) T1:等速驱动扭矩kgf.mm; Fa:轴向负载N【Fa=F+μmg, F:丝杠的轴向切削力N,μ:导向件综合摩擦系数,m:移动物体重量(工作台+工件)kg,g:9.8 】; I:丝杠导程mm; n1:进给丝杠的正效率。 加速时的驱动扭矩:T2=T1+J*W T2:加速时的驱动扭矩kgf.m; T1:等速时的驱动扭矩kgf.m; J:对电机施加的惯性转矩kg.m2【J=Jm+Jg1+(N1/N2)2*[Jg2+Js+m(1/2*3.14)2]】W:电机的角加速度rad/s2; Jm:电机的惯性转矩kg.m2;
滚珠丝杠有限元分析
基于有限元的滚珠丝杠的应力分析 摘要:滚珠丝杠副作为精密线性传动元件其应用范围相当广泛。丝杠作为滚珠丝杠副的重要部件之一,其在运行过程中易出现弯曲变形从而影响滚珠丝杠副的定位精度,严重时甚至可能导致滚珠丝杠副无法正常工作。导致这种现象的主要原因是丝杠内部应力过大。因此,研究丝杠中应力的分布情况对于提高滚珠丝杠副的承载能力便具有重要意义。本文通过visual studio2005对pro/e二次开发实现滚珠丝杠的参数化建模,然后在分析了丝杠的支承方式和载荷情况后,应用有限元方法对丝杠进行应力分析,得出了丝杠应力状态与相关影响因素如中空孔直径和滚珠数目等的关系,最后提出了相应的优化措施。 关键词:滚珠丝杠应力状态支承方式弯曲变形 1、前言 滚珠丝杠副作为精密设备用元件,其原理是在通过滚珠在丝杠轴和螺母间的转动传递力和位移,即将丝杠的旋转运动变为螺母的线性位移。与传统的传递动力的螺杆相比,滚珠丝杠副工作时不需要克服螺杆与螺母螺纹间的滑动摩擦力,其运转情况与轴承相似,因而具有很高的机械效率。同时,滚动接触也减少了磨损,延长了使用寿命。滚珠丝杠副被广泛的应用于各种先进设备中,如高速精密定位轴,机器人技术,度量设备和各种精密仪器等。随着滚珠丝杠副的应用范围越来越广,改进滚珠丝杠副的性能对于提高其相应产品质量便具有重要意义。 滚珠丝杠副第一次应用是在20 世纪30 年代,GM 公司将其应用于汽车驾驶装置。 70 余年来,国内外不少学者在研究滚珠丝杠副方面做了大量的研究工作。Xuesong Mei, Masaomi Tsutsumi, Tao Tao 和Nuogang Sun 对在存在加工误差下滚珠间的载荷分布进行了计算,并提出可通过正向误差来使载荷分布更加均匀【1】。Jui-Pin Hung, James Shih-shyn Wu, Jerry Y.Chiu 对滚珠在循环过程中对返回管的冲击进行了计算,并用有限元分析方法对返回管的载荷分布情况进行了分析,提出改进返回管的几何形状可改善载荷分布情况,其分析的重点在于滚珠对返回管的冲击【2】。 滚珠丝杠副在运行过程中丝杠常出现的失效情况是过大的弯曲变形,表面产生裂纹等。造成这种失效的原因主要为丝杠应力过大,材料缺陷,加工和安装误差等,其中其主导作用的是丝杠内部应力过大。因此,准确的分析和计算丝杠内部的应力值及其分布情况对于提高丝杠承载能力便具有重要意义。 丝杠自身几何形状及其受力情况较为复杂,为得到较为精确的计算结果,通过参数化设计对丝杠优化设计,利用有限元分析使丝杠的约束和载荷情况尽可能与实际工况相符。在第一节,讲述丝杠参数化设计平台,通过参数驱动快速的得到自己想要的尺寸模型;第二节,针对丝杠的载荷情况,对丝杠在工作时的受进行了分析,并给出了计算方法;在第三节,运用有限元分析方法对丝杠的应力状态进行了分析;在第四节,列举了一些相关参数对丝杠应力状态的影响,并给出了相应的优化方案。 2、参数化设计平台 利用vc实现pro/e的二次开发,设计平台如图1所说。 (1)在visaul studio 2005环境下开发pro/e4.0设计开发参数驱动平台程序。 (2)将程序导入pro/e中。 1)将vs生成的dll文件导入pro/e如图1,导入后在菜单栏添加一菜单项“参数”,如图2
滚珠丝杠传动
滚珠丝杠传动 滚珠丝杠是机电一体化的系统中一种新型的螺旋传动机构,在其具有螺旋槽的丝杠与螺母之间装有中间传动原件——滚珠,滚珠丝杠机构虽然结构复杂,制造成本高,不能自锁,但其摩擦阻力矩小、传动效率高(92%-98%),精度高,系统刚度好,运动具有可逆性,使用寿命长,因此在机电一体化系统中得到大量广泛的应用。滚珠丝杠的特点如下: (1)、传动效率高 滚珠丝杠传动系统的传动效率高达90%-98%,为传统的滑动丝杠系统的2~4倍,耗费的能量仅为滑动丝杠的3 1。 (2)、传动精度高 经过淬硬并精磨螺纹滚道后的滚珠丝杠本身具有很高的制造精度,又由于是滚动摩擦,摩擦力小,所以滚珠丝杠传动系统在运动中温升较小,并可预紧消除轴向间隙和对丝杠进行预拉伸以补偿热伸长,因此可以获得较高的定位精度和重复定位精度。 (3)、可微量进给 滚珠丝杠传动系统是高副运动机构,在工作中摩擦力小,灵敏度高,启动平稳,低俗石无爬行现象,因此可以精密地控制微量进给。 (4)、同步性好 由于运动平稳、反应灵敏、无阻碍、无滑移,用几套相同的滚珠丝杠传动系统同时传动系统同时转动几个相同的部件或装,可以获得很好的同步效果。 (5)、高可靠性 与其它传送机械相比,滚珠丝杠传动只需要一般的润滑与防空,有的特殊场合甚至都无需润滑便可工作,系统的故障率也很低,其一般的使用寿命要比滑动丝杠高5~6倍。 1、滚珠丝杠的结构及滚珠循环方式 滚珠丝杠传动机构的工作原理如图1-1-1所示,丝杠4和螺母1的螺纹滚道内置有滚珠2,刚丝杠转动时,带动滚珠沿螺纹滚道滚动,从而产生滚动摩擦。为了防止滚珠从螺纹滚道端面掉出,在螺母的螺旋槽两端设有滚珠回程引
TBI滚珠丝杠选型计算举例
深圳tbi滚珠丝杠选型计算举例 选取的滚珠丝杠转动系统为: 磨制丝杠(右旋) 轴承到螺母间距离(临界长度) l = 1200mm n = 1200mm 固定端轴承到螺母间距离 L k 设计后丝杠总长 = 1600mm 最大行程 = 1200mm = 14(m/min) 工作台最高移动速度 V man = 24000工作小时。 寿命定为 L h μ= 0.1 (摩擦系数) = 1800 (r/min) 电机最高转速 n max 定位精度: 最大行程内行程误差 = 0.035mm 300mm行程内行程误差 = 0.02mm 失位量 = 0.045mm 支承方式为(固定—支承) W = 1241kg+800kg (工作台重量+工件重量) g=9.8m/sec2(重力加速度) I=1 (电机至丝杠的传动比) Fw=μ×W ×g = 0.1×2041×9.8 ≈ 2000 N(摩擦阻力)
F a --- 轴向载荷(N) F --- 切削阻力(N) F w --- 摩擦阻力(N) 从已知条件得丝杠编号: 此设计丝杠副对刚度及失位都有所要求,所以螺母选形为:FDG(法兰式双螺磨制丝杠) 从定位精度得出精度精度不得小于P5级丝杠 FDG_-_X_R-_-P5-1600X____ 计算选定编号 导程 = 14000/18000≈7.7mm 平均转速 平均载荷
时间寿命与回转寿命 =24000×266×60 =383040000转次 额定动载荷 以普通运动时确定fw 取 1.4 得:额定动载荷 C a ≥39673N 以C a 值从FDG 系列表及(丝杠直径和导程、丝杠长度表) 中查出适合的类型为: 公称直径: d 0=40mm 丝杠底径: d 0=33.9mm 导程:P ho =10mm 循环圈数:4.5 额定动载荷为:48244N 。 丝杠编号: FDG 40 × 10R - P5 - 4.5 - 1600 × ____ 预紧载荷 F ao = F max /3=11000/3 ≈ 3666 N 丝杠螺纹长度 L u =L 1-2L e L 1=L u +2L e =1200+2×40=1280mm 丝杠螺纹长度不得小于1280mm 加上螺母总长一半84mm(从系列表中查出螺母总长168mm)。 得丝杠螺纹长度 ≥ 1364m。
数控机床滚珠丝杠的有限元分析任务书预开题报告
毕业设计任务书 学院、系:机械工程与自动化学院 专业:机械设计制造及其自动化 学生姓名:学号: 设计题目: 数控机床滚珠丝杠的有限元分析 2011年2月23日?2009年6月10 起迄日期:_______________________ 日_________________ 指导教师:___________________________________________ 系主任:
发任务书日期:2011 年2月23日 任务书填写要求 1.毕业设计任务书由指导教师根据各课题的具体情况填写,经学生所在系的负责人审查、签字后生效。此任务书应在毕业设计开始前一周内填好并发给学生; 2.任务书内容必须用黑笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,不得随便涂改或潦草书写,禁止打印在其它纸上后剪贴; 3.任务书内填写的内容,必须和学生毕业设计完成的情况相一致, 若有变更,应当经过所在专业及系主管领导审批后方可重新填写; 4.任务书内有关“学院、系” 、“专业”等名称的填写,应写中文全称,不能写数字代码。学生的“学号”要写全号(如020*******),不能只写最后2 位或1 位数字; 5.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。如“ 2004年3 月15日”或“ 2004-03-15 ”。
毕业设计任务书 1毕业设计的任务和要求: 在ANSY歎件平台上,对数控机床滚珠丝杠结构进行有限元建模,并对结构进行静力学、动力学分析,为进一步进行优化设计打下基础。 2.毕业设计的具体工作内容: 1学习有限元分析软件ANSYS勺相应功能? 2在ANSYSk建立滚珠丝杠结构的有限元模型。 3研究滚珠丝杠在使用过程中的受力情况 3对建立的有限元模型进行静力学、动力学分析 4翻译外文文献一篇。
滚珠丝杠螺母副的设计
目录 前言……………………………………………………………………………………滚珠丝杠螺母副的设计……………………………………………………轴承选择……………………………………………………………………………电机选择……………………………………………………………………………设计总结……………………………………………………………………………参考文献……………………………………………………………………………
前言 机电一体化是以机械技术和电子技术为主题,多门技术学科相互渗透、相互结合的产物,是正在发展和逐渐完善的一门新兴的边缘学科。机电一体化使机械工业的技术结构、产品结构、功能与构成、生产方式及管理体系发生了巨大变化,使工业生产由“机械电气化”迈入了以“机电一体化”为特征的发展阶段。 随着社会生产和科学技术的迅速发展,机械产品的性能和质量不断提高。产品的更新换代也不断加快。因此对机床不仅要求具有较高的精度和生产率,而且应能迅速地适应产品零件的变换,生产的需要促使了数控机床的产生。 数控机床是指机床的操作命令以数值数字的形式描述工作过程按规定的程序自动进行的机床。随着微电子技术,特别是计算机技术的发展,数控机床迅速地发展起来。 装备工业的技术水平和现代化程度决定着整个国民经济的水平和现代化程度,数控技术及装备是发展新兴高新技术产业和尖端工业(如信息技术及其产业、生物技术及其产业、航空、航天等国防工业产业)的使能技术和最基本的装备。马克思曾经说过“各种经济时代的区别,不在于生产什么,而在于怎样生产,有什么劳动资料生产”。制造技术和装备就是人类生产活动的最基本的生产资料,而数控技术又是当今先进制造技术和装备最核心的技术。当今世界各国制造业广泛采用的数控技术,以提高制造能力和水平,提高对动态多变市场的适应能力和竞争能力。此外世界上各工业发达国家还将数控技术及数控装备列为国家的战略物资,不仅采取重大措施来发展自己的数控技术及其产业,而且在“高精尖”数控关键技术和装备方面对我国实行封锁和限制政策。总之,大力发展以数控技术为核心的先进制造技术已成为世界各发达国家加速经济发展、提高综合国力和国家地位的重要途径。 此次“机电一体化课程设计”主要简单设计出数控机床系统,其实离实际真正工业用数控机床还有很大的距离。由于时间仓促和自己知识水平有限,在设计中难免会有些许瑕疵,恳请老师指正。
计算滚珠丝杆的扭矩
同问 如何计算滚珠丝杆的扭矩,从而选择电机的型号 2011-7-28 08:23 满意回答 匀速运行,非精确计算可以套用以下公式:Ta=(Fa*I)/(2*3.14*n1) 式中 Ta:驱动扭矩kgf.mm; Fa:轴向负载N(Fa=F+μmg,F:丝杠的轴向切削力N,μ:导向件的综合摩擦系数,m:移动物体重量(工作台+工件)kg,g:9.8 ); I:丝杠导程mm; n1:进给丝杠的正效率。 计算举例: 假设工况:水平使用,伺服电机直接驱动,2005滚珠丝杠传动,25滚珠直线导轨承重和导向,理想安装,垂直均匀负载1000kg,求电机功率: Fa=F+μmg,设切削力不考虑,设综合摩擦系数μ=0.01,得 Fa=0.01*1000*9.8=98N; Ta=(Fa*I)/(2*3.14*n1),设n1=0.94,得Ta=98*5/5.9032≈83kgf.mm=0.83N.M 根据这个得数,可以选择电机功率。以台湾产某品牌伺服为例,查样本得知,额定扭矩大于0.83N.M的伺服电机是400W。(200W是0.64N.M,小了。400W 额定1.27N.M,是所需理论扭矩的1.5倍,满足要求) 当然咯,端部安装部分和滚珠丝杠螺母预压以及润滑不良会对系统产生静态扭矩,也称初始扭矩,实际选择是需要考虑的。另外,导向件的摩擦系数不能单计理论值,比如采用滚珠导轨,多套装配后的总摩擦系数一定大于样本参数。而且,该结果仅考虑驱动这个静止的负载,如果是机床工作台等设备,还要考虑各向切削力的影响。 若考虑加速情况,较为详细的计算可以参考以下公式(个人整理修正的,希望业内朋友指点): 水平使用滚珠丝杠驱动扭矩及电机功率计算: 实际驱动扭矩:T=(T1+T2)*e T:实际驱动扭矩; T1:等速时的扭矩; T2:加速时的扭矩; e:裕量系数。 等速时的驱动扭矩:T1=(Fa*I)/(2*3.14*n1) T1:等速驱动扭矩kgf.mm; Fa:轴向负载N【Fa=F+μmg,F:丝杠的轴向切削力N,μ:导向件综合摩擦系数,m:移动物体重量(工作台+工件)kg,g:9.8 】; I:丝杠导程mm; n1:进给丝杠的正效率。 加速时的驱动扭矩:T2=T1+J*W T2:加速时的驱动扭矩kgf.m;
滚珠丝杠的选取与计算.part1
4.1.1驱动扭矩仅为滑动丝杠的1/3 滚珠丝杠是滚珠丝杠与螺母间的螺纹沟槽做滚动运动,因此可获得高效率,与过去的滑动丝杠相比,驱动扭矩仅为1/3以下(图1与2)。从而,不仅可将旋转运动变为直线运动,而且可以容易地将直线运动变成旋转运动。 图1:正效率(旋转→直线) 图2:反效率(直线→旋转) 4.1.1.1导程角的计算法 p d h ??=πρβtan …………………………………… ( 1 ) β:导程角 (度) d p :滚珠中心直径 (mm ) ρh :进给丝杠的导程 (mm ) 4.1.1.2推力与扭矩的关系
当施加推力或扭矩时,所产生的扭矩或推力可用(2)~(4)式计算。 (1)获得所需推力的驱动扭矩 T :驱动扭矩 Fa :导向面的摩擦阻力 Fa=μ×mg μ:导向面的摩擦系数 g :重力加速度 ( 9.8m/s 2 ) m :运送物的质量 ( kg ) ρh :进给丝杠的导程 ( mm ) η:进给丝杠的正效率 (图1) (2)施加扭矩时产生的推力 h T Fa ???=ρηπ12…………………………………… ( 2 ) Fa :产生的推力 ( N ) T :驱动扭矩 (N mm ) ρh :进给丝杠的导程 ( mm ) η:进给丝杠的正效率 (图1) (3)施加推力时产生的扭矩 π ηρ22Fa h T ??= …………………………………… ( 4) T :驱动扭矩 (N mm ) Fa :产生的推力 ( N ) ρh :进给丝杠的导程 ( mm ) η:进给丝杠的正效率 (图2)
4.1.1.3驱动扭矩的计算例 用有效直径是:32mm ,导程:10mm (导程角:5O 41’的丝杠,运送质量为500Kg 的物体,其所需的扭矩如下 (1)滚动导向(μ=0.003) 滚珠丝杠及(μ=0.003,效率η=0.96) 导向面的摩擦阻力 Fa=0.003×500×9.8=14.7N 驱动扭矩 mm N T ?=??=2496 .02107.14π (2)滚动导向(μ=0.003) 滚珠丝杠及(μ=0.2,效率η=0.32) 导向面的摩擦阻力 Fa=0.003×500×9.8=14.7N 驱动扭矩 mm N T ?=??=7332 .02107.14π 4.1.2能高速进给 因滚珠丝杠效率高,发热低,从而能进行高速进给。 高速例)图7表示使用大导程滚珠丝杠以2m/s 速度使用时的速度线图。
滚珠丝杠副传动系统
滚珠丝杠副传动系统 滚珠丝杠螺母副的特点 滚珠丝杠螺母副是一种低摩擦、高精度、高效率的机构。滚珠丝杠螺母副其它特点如下: 1.运动极灵敏,低速时不会出现爬行; 2.可以完全消除间隙并可预紧,故有较高的轴向刚度,反向定位精度高; 3.滚珠丝杠螺母副摩擦系数小,无自锁,能实现可逆传动; 4.滚珠丝杠螺母副的滚珠循环方式一般分外循环和内循环两种,如图7.3所示。 预紧是指它在过盈的条件下工作,把弹性变形量控制在最小限度。滚珠丝杠多采用双螺母调隙结构。用双螺母加预紧力消除轴向间隙时,必须注意:预紧力不宜过大或过小,要特别减小丝杠安装部分和驱动部分的间隙。 双螺母调隙结构分为螺纹式、垫片式和齿差式等,如图7.4所示。 內絹环方式 图7.3滚珠丝杠螺母副 (分别点击图片进入仿真页 a.螺纹式 b.垫片式
c.齿差式 图7.4双螺母调隙结构 滚珠丝杠的主要技术参数 滚珠丝杠的主要技术参数如图7.5所示。 1)名义直径DO 滚珠丝杠的名义直径DO是滚珠与螺纹滚道在理论接触角状态时,包络滚珠球心的圆柱直径。它是滚珠丝杠螺母副的特征尺寸。名义直径与承载能力有直接关系,DO越大,承载能力和刚度越大。 2)基本导程Ph 导程是丝杠相对于螺母旋转一圈时,螺母上基准点的轴向位移。导程的大小是根据机床的加工精度要求确定的。导程过小势必使滚珠直径变小,滚珠丝杠螺母副的承载能力亦随之减小。 3)滚珠直径dO 一般取d0=0.6Ph 4)滚珠的工作圈数j和工作滚珠总数N 工作圈数j 一般取2.5?3.5圈,而工作滚珠总数N以不大于150个为宜。 5)列数K 要求工作圈数较多的场合,可采用双列或多列式螺母的结构形式
滚珠丝杠基础知识
滚珠丝杠基础知识 1 滚珠丝杠公称直径与公称导程组合、制造范围 [img]https://www.wendangku.net/doc/d17262564.html,/hydt/pic/4.18a1.jpg[/img] 3 滚珠丝杠副的结构类型、编号方法 [img]https://www.wendangku.net/doc/d17262564.html,/hydt/pic/4.18b1.jpg[/img] 5 滚珠丝杠副的精度 5.1 精密等级 根据使用范围及要求将滚珠丝杠副分为定位滚珠丝杠幅(P)传动滚珠丝杠副(T),精度分为七个等级,即1、2、3、4、5、6、7、10级,1级精度最高,依次降低。 [img]https://www.wendangku.net/doc/d17262564.html,/hydt/pic/4.18c1.jpg[/img] 5.2行程偏差和行程变动量 根据滚珠丝杠副类型按下表检验 [img]https://www.wendangku.net/doc/d17262564.html,/hydt/pic/4.18d1.jpg[/img] 5.2.1 有效行程内的行程偏差ep与行程变动量VUP: 有效行程是有精度要求的行程长度LU
Lu=Lx+2La+LnLa安全行程La=(1-2)ph Lx机械最大行程Ln螺母的长度ph 公称导程 E1-E2按国家标准GB/T17857.3-1998,―滚珠丝杠副的验收条件和验收检验‖。见附表1。 5.2.2 300mm行程内与2π弧度行程内行程变动量V300P与V2 π p E3-E4按国家标准GB/T17857.3-1998,―滚珠丝杠副的验收条件和验收检验‖。见附表1续。 5.2.3 余程Le 余程是没有精度要求的行程长度。 余程表6 [img]https://www.wendangku.net/doc/d17262564.html,/hydt/pic/4.18e1.jpg[/img] 6 行程补偿值C 6.1 滚珠丝杠的热变形将导致长度、定位精度变化,热变形可由下式给出: δt=α*△t*Lu (公式1) α-热膨胀系数(12.0*10-6) △t -温升(一般取2-4℃)
数控机床进给滚珠丝杠的选择与计算
1 滚珠丝杠副的载荷计算 (1) 工作载荷F 工作载荷F是指数控机床工作时,实际作用在滚珠丝杠上的轴向作用力,其数值可用下列进给 作用力的实验公式计算: 对于燕尾形导轨机床 F=kFx+f'(Fz+2Fy+W)(1) 对于矩形导轨机床 F=kFx+f'(Fz+Fy+W)(2) 对于三角形或组合导轨机床 F=kFx+f'(Fz+W)(3) 对于钻镗主轴圆导轨机床 对于滚动导轨机床 F=Fx+f'(Fz+W)+Fr(5) 式(1)~(5)中:Fx、Fy、Fz—x、y、z方向上的切削分力,N; Fr—密封阻力,N;W—移动部件的重量,N;M—主轴上的扭矩,N·m;dz—主轴直径,mm; 表 1 f′—导轨摩擦系数;f—轴套和轴架以及主轴的键的摩擦系数;k—考虑颠覆力矩影响的实验系数。正常情况下,k、f'与f可取表1数值。 (2) 最小载荷Fmin 最小载荷F?min为数控机床空载时作用于滚珠丝杠的轴向载荷。此时,Fx=Fy=Fz=0。 (3) 最大工作载荷F?max 最大载荷F?max为机床承受最大切削力时作用于滚珠丝杠的轴向载荷。
(4) 平均工作载荷Fm与平均转速nm 当机床工作载荷随时间变化且此间转速不同时, 式中:t1,t2,…,tn分别为滚珠丝杠在转速n1,n2,…,nn下,所受轴向载荷分别是F1,F2,…,Fn时的工作时间(min) 当工作载荷与转速接近正比变化且各种转速使用机会均等时,可用下式求得Fm和nm。 Fm=(2Fmax+Fmin)/3(8)nm=(nmax+nmin)/2(9) 2 滚珠丝杠副主要技术参数的确定 (1) 导程Ph 根据机床传动要求,负载大小和传动效率等因素综合考虑确定。一般选择时,先按机床传动要求确定,其公式为:Ph≥vmax/nmax(10) 式中:vmax—机床工作台最快进给速度,mm/min;nmax—驱动电机最高转速,r/min。在满足控制系统分辨率要求的前提下,Ph应取较大的数值。 (2) 螺母选择 由于数控机床对滚珠丝杠副的刚度有较高要求,故选择螺母时要注重其刚度的保证。推荐按高刚度要求选择预载的螺母型式。其中插管式外循环的端法兰双螺母应用最为广泛。它适用重载荷传动、高速驱动及精密定位系统。并在大导程、小导程和多头螺纹中具有独特优点,且较为经济。 ①滚珠的工作圈数i和列数j。根据所要求性能、工作寿命,推荐按表2选取。 表2 ②法兰形状。按安装空间由标准形状选择,亦可根据需要制成特殊法兰形状。 (3) 导程精度选择 根据机床定位精度,确定滚珠丝杠副导程的精度等级。一般情况下,推荐按下式估算: 式中:E——累计代表导程偏差,μm; TD——机床有效行程的定位精度,μm。
滚珠丝杠课程设计
本科生专业课程设计 (届) 学生姓名: 学号: 专业名称: 班级: 指导教师: 年月日
目录 专业课程设计计算说明书 (3) 原始数据 (3) 一、系统总体方案设计 (3) 二、机械系统的设计计算 (4) 三、控制系统设计 (19)
专业课程设计计算说明书 原始数据 设计一台微机控制XY两坐标工作台,采用MCS-51单片机控制, 控制方式采用步进电机开环控制。其他参数如下: 一、系统总体方案设计 由设计任务书知,本次设计可采用如下方案: (一)机械系统 1、传动机构采用滚珠丝杠副与齿轮或带减速。 2、导向机构采用滚动直线导轨。 3、执行机构采用步进电机。 (二)接口设计 1、人机接口
(1)采用键盘或BCD 码盘作为输入。 (2)采用LED 作为电源等指示标志。 (3)采用蜂鸣器或扬声器作为警报装置。 (4)采用数码管作为显示器。 2、机电接口 采用光电偶合器作为微型机与步进电动机驱动电路的接口,实现电气隔离。 (三)伺服系统设计 本次设计的系统精度要求不高,载荷不大,因此采用开环控制。 (四)控制系统设计 1、控制部分方案选择 控制方案不外乎三种:开环控制、半闭环控制、闭环控制。 上图为最简单的“开环控制”,若在“机械传动”机构中引出反馈控制部分,再经过比较放大的则为“半闭环控制”。如若是在“机械执行机构中引出反馈则为闭环控制。 采用步进电机来实现驱动,一般情况下多采用开环控制。因为步进电机的输出 转角与控制器提供的脉冲数有着正比关 系,电机转速与控制器提供的脉冲频率成正比。因此通常在精确度要求不是很高时, 采用步进电机是合理的。当然,由于步进电机具有高频易失步,负载能力不强的缺点。 二、机械系统的设计计算 (本次设计若未作特殊说明,其中的表与图均来自:由郑堤主编的《机电一体化设计基础》) (一)初选步进电动机 根据已知条件:X 、Y 方向的脉冲当量y x δδ、分别为: 开环控制流程图 开环控制原理图
滚珠丝杠驱动的加工中心
滚珠丝杠驱动的加工中心 目录 1 引言 (1) 1.1 加工中心的发展状况 (1) 1.1.1 加工中心在国外的发展 (1) 1.1.2 主轴部件的研究进展 (2) 1.2 课题的目的及容 (3) 1.3 课题解决的关键问题 (3) 1.4 解决上述问题的策略 (4) 2 方案拟定 (5) 2.1 加工中心主传动系统的组成 (5) 2.2 机械系统方案的确定 (5) 2.2.1 主轴传动机构 (5) 2.2.2 主轴进给机构 (6) 2.2.3 主轴准停机构 (6) 2.2.4 刀具自动夹紧机构 (6) 2.3 加工中心主轴组件总体设计方案的确定 (8) 3 主轴组件的主运动部件 (10) 3.1 主电机选型 (10) 3.2 主轴 (10) 3.2.1 主轴的结构设计 (10) 3.2.2 主轴受力分析 (16) 3.2.3 主轴的刚度校核 (20) 3.2.4 主轴的强度校核 (21) 3.3 主轴组件的支承 (22) 3.3.1 主轴轴承的类型 (22) 3.3.2 主轴轴承的配置 (24) 3.3.3 主轴轴承的预紧 (25) 3.3.4 主轴支承方案的确定 (26) 3.3.5 滚动轴承的精度与配合 (27) 3.3.6 主轴轴承设计计算 (27) 3.4同步带的设计计算 (29) 3.5主轴组件的润滑与密封 (32) 3.5.1 主轴组件的润滑 (32) 3.5.2主轴组件的密封 (32)
3.5.3 本课题的润滑与密封方案的确定 (34) 3.6 主轴上键的设计与计算 (34) 3.7 液压缸的设计计算 (35) 结论.......................................................... 错误!未定义书签。参考文献. (37) 致谢.......................................................... 错误!未定义书签。
滚珠丝杠精度等级
滚珠丝杠精度等级 Pleasure Group Office【T985AB-B866SYT-B182C-BS682T-STT18】
国内的等级精度分为P1,P2,P3,P4,P5,P7,P10这7个等级,JIS等级精度分为C0, C1,C3,C5,C7,C10这6种精度, 各种螺杆长度之导程误差(单位为um)如下表所示: 另外螺杆也有标示任意300mm长的精度 , 意即就是不论你的滚珠螺杆有多长 , 任取 一段300mm内之的精度皆为规格中保证之精度以内,如下表所示: 【机床定位精度要求与丝杠精度】 的精度将直接影响数控机床各坐标轴的定位精度。普通精度的数控机床,一般可选用D级,精密级数控机床选用C级。 精度中的导程误差对机床定位精度影响最明显。而丝杠在运转中由于温升引起的丝杠伸长,将直接影响机床的定位精度。当L为丝杠螺纹有效长度时,L即为方向目标值T,在丝杠图纸上标示为负值。用户在定购滚珠丝杠时,必须提出滚珠丝杠的方向目标值。 【提高传动的精度和刚度】 主要是提高进给系统中传动零件的精度和支承刚度。首先是保证各个零件的加工精度,尤其是提高滚珠丝杠螺母副(直线进给系统)、蜗杆副(圆周进给系统)的传动精度。另外,在进给传动链中加人减速齿轮传动副,对滚珠丝杠和轴承进行预紧,消除齿轮、蜗杆等传动件的间隙,从而提高进给系统的精度和刚度。 对梯形丝杠的精度要求】 1.螺旋线公差 螺旋线误差是指在中径线上,实际螺旋线相对于理论螺旋线偏离的最大代数差。又分为: (1)丝杠一转内螺旋线误差; (2)丝杠在指定长度上(25 mrn、100 mm或200 mm)的螺旋线误差: (3)丝杠全长的螺旋线误差。 螺旋线误差较全面地反映了丝杠的位移精度,但由于测量螺旋线误差的动态测量仪器尚未普及,国家标准中只对3、4、5、6级的丝杠规定了螺旋线公差。 2.螺距公差
滚珠丝杠的设计计算与选用讲解学习
滚珠丝杠的设计计算 与选用
滚珠丝杠的设计计算与选用 滚珠丝杠 滚珠丝杠是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。 滚珠丝杠由螺杆、螺母和滚珠组成。它的功能是将旋转运动转化成直线运动,这是滚珠螺丝的进一步延伸和发展,这项发展的重要意义就是将轴承从滚动动作变成滑动动作。由于具有很小的摩擦阻力,滚珠丝杠被广泛应用于各种工业设备和精密仪器。 滚珠丝杠是工具机和精密机械上最常使用的传动元件,其主要功能是将旋转运动转换成线性运动,或将扭矩转换成轴向反覆作用力,同时兼具高精度、可逆性和高效率的特点。 1)与滑动丝杠副相比驱动力矩为1/3 由于滚珠丝杠副的丝杠轴与丝母之间有很多滚珠在做滚动运动,所以能得到较高的运动效率。与过去的滑动丝杠副相比驱动力矩达到1/3以下,即达到同样运动结果所需的动力为使用滚动丝杠副的1/3。在省电方面很有帮助。 2)高精度的保证 滚珠丝杠副是用日本制造的世界最高水平的机械设备连贯生产出来的,特别是在研削、组装、检查各工序的工厂环境方面,对温度·湿度进行了严格的控制,由于完善的品质管理体制使精度得以充分保证。 3)微进给可能 滚珠丝杠副由于是利用滚珠运动,所以启动力矩极小,不会出现滑动运动那样的爬行现象,能保证实现精确的微进给。 4)无侧隙、刚性高 滚珠丝杠副可以加予压,由于予压力可使轴向间隙达到负值,进而得到较高的刚性(滚珠丝杠内通过给滚珠加予压力,在实际用于机械装置等时,由于滚珠的斥力可使丝母部的刚性增强)。 5)高速进给可能 滚珠丝杠由于运动效率高、发热小、所以可实现高速进给(运动)。
滚珠丝杠副特性 ?传动效率高 ?滚珠丝杠传动系统的传动效率高达90%~98%,为传统的滑动丝杠系统的2~4倍,如图1.1.1所示,所以能以较小的扭矩得到较大的推力,亦可由直线运动转为旋转运动(运动可逆)。 ?运动平稳 ?滚珠丝杠传动系统为点接触滚动运动,工作中摩擦阻力小、灵敏度高、启动时无颤动、低速时无爬行现象,因此可精密地控制微量进给。 ?高精度 ?滚珠丝杠传动系统运动中温升较小,并可预紧消除轴向间隙和对丝杠进行预拉伸以补偿热伸长,因此可以获得较高的定位精度和重复定位精 度。 ?高耐用性 ?钢球滚动接触处均经硬化(HRC58~63)处理,并经精密磨削,循环体系过程纯属滚动,相对对磨损甚微,故具有较高的使用寿命和精度保持 性。 ?同步性好 ?由于运动平稳、反应灵敏、无阻滞、无滑移,用几套相同的滚珠丝杠传动系统同时传动几个相同的部件或装置,可以获得很好的同步效果。 ?高可靠性