武汉大学摄影测量试卷
武汉大学2006~2007学年上学期
《摄影测量基础》试卷(A)
学号: 姓名: 院系:遥感信息工程 专业:遥感科学与技术得分:
一、填空题(20分,每空1分)
1、表示航摄像片的外方位角元素可以采用、
和三种转角系统。
2、航摄像片是所覆盖地物的投影。
3、摄影测量加密按数学模型可分为、和三种方法。
4、从航摄像片上量测的像点坐标可能带有、、
和四种系统误差。
5、要将地物点在摄影测量坐标系中的模型坐标转换到地面摄影测量坐标系,最少需要
个和个地面控制点。
6、带状法方程系数矩阵的带宽是指。
7、人眼观察两幅影像能产生立体视觉的基本条件是、
、
和
。
二、名词解释(20分,每个4分)
1、内部可靠性:
2、解析相对定向:
3、GPS辅助空中三角测量:
4、主合点:
5、单片空间后方交会:
三、简答题(45分,每题15分)
1、今在航高H处利用主距为f的航摄仪拍得一张理想的航摄像片,试导出像片上的像点坐标与
其对应物点坐标间的关系式,并说明式中各符号的物理意义。
2、用图示意以z 轴为主轴的航摄像片的外方位元素,并指出其在摄影测量中的作用。
3、在城市建设规划中,发现某居民区新增了大量的建筑物,为了及时更新该地区的地籍图,利用配有POS 系统的数字航摄仪获取了一个立体像对,请问如何用最快速的方法将新建房屋加入地籍管理数据库中?在POS 系统提供的像片外方位元素无误差的情况下,简要叙述其基本思想并绘出作业流程图。
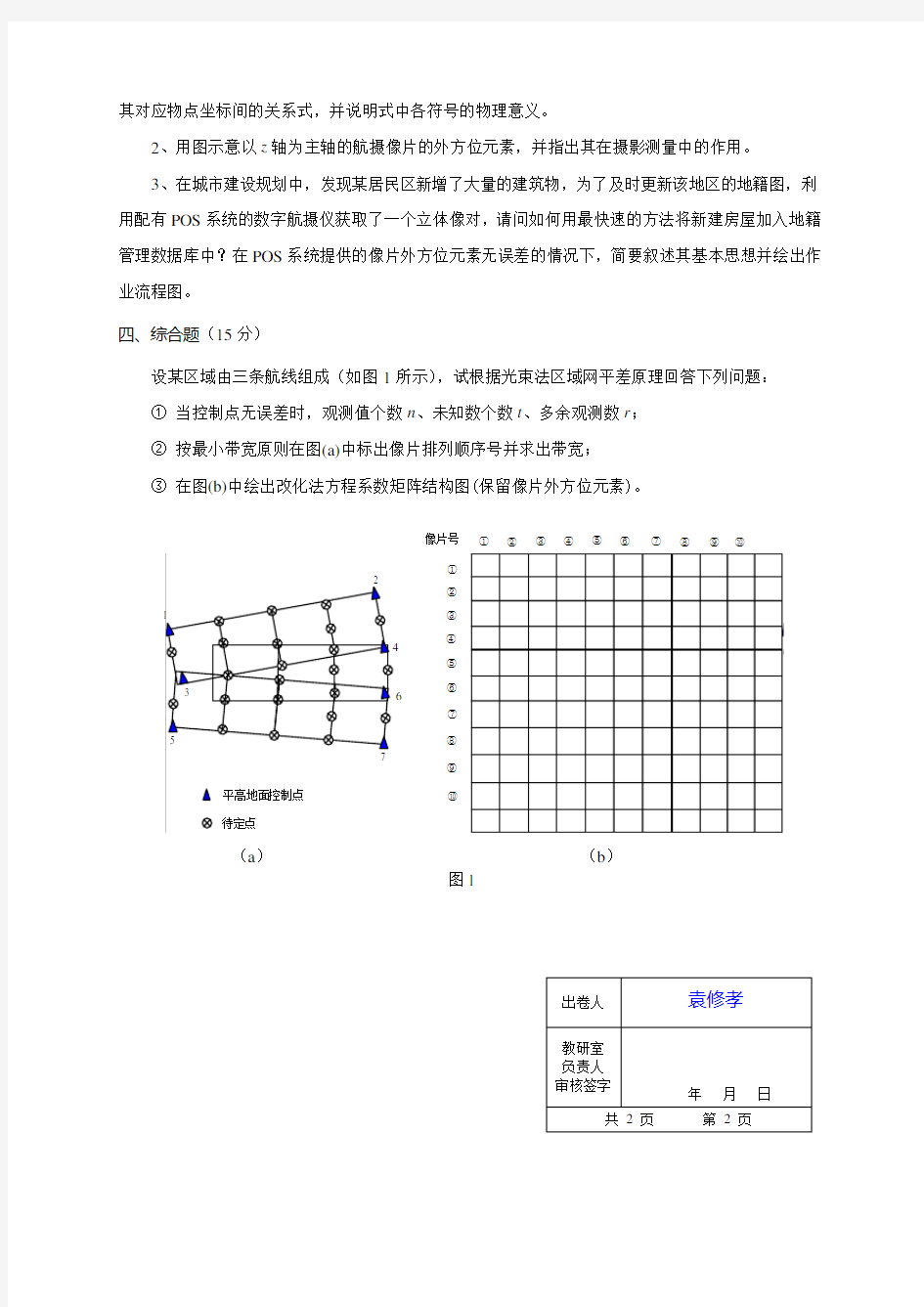
四、综合题(15分)
设某区域由三条航线组成(如图1所示),试根据光束法区域网平差原理回答下列问题: ① 当控制点无误差时,观测值个数n 、未知数个数t 、多余观测数r ;
② 按最小带宽原则在图(a)中标出像片排列顺序号并求出带宽;
③ 在图(b)中绘出改化法方程系数矩阵结构图(保留像片外方位元素)。
①②③④⑤⑥⑦ 像片号 (a ) (b )
图1 ⑧ ⑨ ⑩
出卷人
袁修孝 教研室
负责人
审核签字 年 月 日
共 2 页 第 2 页
武大版摄影测量学重点
摄影测量学 第一章绪论 1、基础地理信息类型传统的 4D 数 据 DLG-Digital Line Graphic,数字线 化图 DEM -Digital Elevation Model,数字高程模 型 DOM - Digital Orthophoto Map,数字正 射影像 DRG - Digital Raster Graphic,数 字栅格地图 2、传统的摄影测量学 是利用光学摄影机获取的像片,通过像片来研究和确定被摄物体的形状、大小、位置、性质及其相互关系的一门科学技术。 3、摄影测量与遥感 是对非接触传感器系统获得的影像进行记录、量测、分析和表达,从而获得地球及其环境和其它物体的可靠信息的一门工艺、科学和技术。 4、摄影测量是影像信息的获取、处理、提取和成果表达的一门信息科学。 5、摄影测量的任务: (1)地形测量领域:各种比例尺的地形图、专题图、特种地图、正射影像地图、景观图 ;建立各种数据库;提供地理信息系统和土地信息系统所需要的基础数据 (2)非地形测量领域生物医学、公安侦破、交通事故、勘察古文物、古建筑建筑物、变形监测、工业摄影测量、环境监测 6、摄影测量的特点 ?无需接触物体本身获得被摄物体信息 ?由二维影象获取对象的空间三维信息 ?面采集数据方式,信息丰富逼真 ?同时提取物体的几何与物理信息 7、摄影测量学的三个发展阶段 (1)模拟摄影测量阶段(1851-1970) ?利用光学/机械投影方法实现摄影过程的反转,用两个/多个投影器模拟摄影机摄影时的位置和姿态构成与实际地形表面成比例的几何模型,通过对该模型的量测得 到地形图和各种专题图 (2)解析摄影测量阶段(1950-1980) 以电子计算机为主要手段,通过对摄影像片的量测和解析计算方法的交会方式来 研究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影 测量产品的一门科学 (3)数字摄影测量阶段(1970-现在)基于摄影测量的基本原理,通过对所获取的数字/数字化影像进行处理,自动(半自动)提取被摄对象用数字方式表达的几何与物 理信息,从而获得各种形式的数字产品和目视化产品 8、摄影测量三个发展阶段的特点
武汉大学测绘学院摄影测量集中实习
武汉大学测绘学院摄影 测量集中实习 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
课程编号:课程性质:专业必修 数字摄影测量实习 实习报告 学院:测绘学院 专业:测绘工程 地点:校内 班级: 组号: 姓名: 学号: 教师: 2017年 6月 19日至 2017年 7 月 8日
第 1 章空三报告 1.1 NAT空中三角成果数据流程 1.设置测区基本参数 2.建立相机文件,导入老师给的文件 3.导入外业控制点 4.影像格式转换 5.自动转点 6.进行PATB平差计算 1.2 空三加密需要注意 1.像素大小、焦距、像主点坐标、畸变参数,像幅尺寸 (数码相机) 2.模型连接点平面及高程限差、地面定向点残差限差、地面检查点残差限差 3.控制点坐标、刺点片及点之记
1.3 空三流程图 1.4 空三评查步骤 1.4.1 需要平差的原因 1同一物体在不同视角下的图像有极大的不同,物体遮挡而丢失信息 2光照、场景中物体的几何形状和物理特性、物体和摄像机之间的空间关系3从带畸变和噪声的、二维的、单一的灰度值中提取出尽可能不带畸变和噪声的、三维场景中的诸多因素 1.4.2 粗差的影响 1观测值中存在粗差,则某一观测的误差对所有残差都有影响 2 一个观测的残差包含着所有粗差的影响 1.4.3 平差方法-循环粗差剔除 1 先外围加4个点进行平差解算 像方的粗差点排除到一定程度后,开始加预测的控制点,不要一次性刺入所有预测控制点,建议从外向内回字形一圈圈刺预测控制点,留区域中的3到4个控制点做检核点。每刺入一轮都先平差,编辑得差不多再进行下一轮。 2 继续调整控制点
摄影测量复习资料武大版W.B-Ne.M
1.摄影测量与遥感的概念和意义: 概念:摄影测量与遥感是对非接触传感器系统获得的影像及其数字表达进行记录、量测和解译,从而获得自然物体和环境的可靠信息的一门工艺、科学和技术 。 特点:在像片上进行量测和解译;无需接触物体本身,较少受自然和地理条件限;可摄得瞬间的动态物体影像;像片及其它各类影像提供物体的大量几何信息和物理信息 2.传统摄影测量学的定义: 传统的摄影测量学是利用光学摄影机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门学科。 3.摄影测量学的三个发展阶段: 模拟摄影测量,解析摄影测量,数字摄影测量。 4.摄影测量的任务: 地形测量领域:各种比例尺的地形图、专题图、特种地图、正射影像地图、景观图;建立各种数据库;提供地理信息系统和土地信息系统所需要的基础数据。 非地形测量领域:生物医学;公安侦破;古文物、古建筑;建筑物变形监测;军事侦察;矿山工程。 5.摄影测量中常用的坐标系及作用: 像平面坐标系,用以表示像点在像平面上的位置。 像空间坐标系,为了便于进行空间坐标的变换建立的描述像点在像空间位置的坐标系。 像空间辅助坐标系,一种坐标系相对统一,便于进行计算的坐标系。 摄影测量坐标系,由像点的像空间辅助坐标求得相应地面点的摄影测量坐标的坐标系。 地面测量坐标系,摄影测量方法求得的地面点坐标进行变换所得,是最后提供给用户使用的坐标形式。 地面摄影测量坐标系,在摄影测量坐标系与地面测量坐标系之间建立的一种过渡性的坐标系。 6.航摄像片的内、外方位元素及作用: 内方位元素包括三个参数,即摄影中心S 到像片的垂距(主距)f 及像主点o 在像框标坐标系中的坐标x0,y0。 一张像片的外方位元素包括六个参数,其中有三个是直线元素,用于描述摄影中心的空间坐标值,用Xs ,Ys ,Zs 表示,是摄影中心S 在地面空间坐标系中的坐标;通常选用地面摄影测量坐标系。另外三个是角元素,用于表达像片面的空间姿态。外方位三个角元素可看作是摄影机光轴从起始的铅垂方向绕空间坐标轴按某种次序连续三次旋转形成的。 内方位元素是描述摄影中心与像片之间相关位置的参数,外方位元素是确定摄影光束在摄影瞬间的空间位置和姿态的参数。 7.共线方程的内容及应用: ???????-+-+--+-+--=-+-+--+-+--=)()()()()()()()()()()()(333222333111s A s A s A s A s A s A s A s A s A s A s A s A Z Z c Y Y b X X a Z Z c Y Y b X X a f y Z Z c Y Y b X X a Z Z c Y Y b X X a f x 式中: x , y 为以像主点为原点的像点坐标;X A ,Y A ,Z A 为相应地面点坐标;f 为像片主距,影像的内方位元素 (x 0 , y 0 ),f ;X S ,Y S ,Z S 为摄影中心S 的物方空间坐标;a i , b i ,c i (i = 1,2,3)为影像的三个外方位角元素组成的九个方向余弦。 其应用主要有:
GIS应用 地理信息系统 武汉大学摄影测量历届考研试题[2]
武汉大学 2008年攻读硕士学位研究生入学考试试题 科目名称:摄影测量学(A卷)科目代码:936 一、简答题(共5小题,每小题12分,共60分) 1.(12分)请作示意图分别表示航空摄影像片的内方位元素和外方位元素并加以必要的符号和文字说明。 2.(12分)航空摄影测量解析计算中对于像点坐标的系统误差改正,在实际作业过程中通常很少顾及因大气折光和地球曲率引起的像点坐标系统误差改正,请说明为什么? 3.(12分)请比较说明摄影测量三个历史发展阶段的各自特点。 4.(12分)请详细解释POS辅助空中三角测量的含义,同时说明由POS得到的观测数据与光束法平差的必要性。 5.(12分)请解释选权迭代法粗差探测的基本含义,权函数的选择应满足哪些条件? 二、综合问答题(共6小题,每小题15分,共90分) 1.(15分)请解释共面条件的含义并给出共面条件的基本表达式,同时说明共面条件在摄影测量中的主要应用。 2.(15分)传统光束法区域网三角测量的基本思想是什么?请用流程图表示传统光束法区域网空中三角测量的主要内容和计算步骤。 3.(15分)在数字高程模型的内插方法中,请以双线性内插方法为例,说明由规则正方形格网点内插离散点高程的原理和方法(请用简图和符号加以辅助说明)。 4.(15分)在航空摄影测量中,地面坡度对数字影像匹配有何影响?有哪些方法可以有效地克服地面坡度对数字影像匹配的影响? 5.(15分)用传统数字微分纠正方法所制作的正射影像上依然存在投影差的主要原因是什么?可采取哪些措施来限制正射影像上投影差的大小或完全消除正射影像上的投影差现象? 6.(15分)你认为当代数字摄影测量与计算机视觉在理论和实践方面有哪些联系与区别?
武汉大学数字摄影测量学试卷及答案
武汉大学2005—2006 学年下学期 《数字摄影测量》试卷(A) 学号: 姓名: 院系: 专业: 得分 一. 名词解释(每题3分,共计15分) 1.影像匹配,2. 金字塔影像, 3. 立体正射影像对,4.同名核线,5.立体透视图 二. 简答题(55分) 1. 以图1所示数字高程模型矩形格网为例,请说明图1中所画等高线的跟踪过程.如果 有特征线存在,应该如何处理?(15分) 第3000 x 条扫描线 (0,0) (1,0) (2,0) (3,0) 图2 一幅SPOT影像 图1 基于矩形格网的等高线跟踪 2. 图2是一幅SPOT影像,当影像的外方位元素和DEM已知时,如何制作正射影像,请 说明其原理过程,并指出与框幅式的航空影像制作正射影像算法的相同和不同之处。 (15分) 3.“相关系数最大”影像匹配、基于物方的VLL法影像匹配和最小二乘法影像匹配的相 同点及差别是什么?(15分) 4. 简述一次样条有限元数字高程模型内插方法的原理流程(10分) 三.综合题(30分) 1.什么是特征匹配?它与基于灰度的影像匹配有什么不同?结合课间编程实习内容,请说明实现自动相对定向的方法原理和关键技术(20分)。 2. 除了所学过的影像匹配方法之外,你还知道哪几种比较有效的匹配算法,请叙述其中一种方法的基本原理及特点(10分). 出卷人潘励 教研室 负责人 审核签字年月日 共 1 页第 1 页
武汉大学遥感信息工程学院 2005---2006学年度第二学期期末考试 《数字摄影测量》试卷(A)答案 一、 名词解释: 1 、影像匹配: 【答】通过一定的匹配算法在两幅或多幅影像之间识别同名点,如二维影像匹配中通过比较目标区和搜索区中相同大小的窗口的相关系数,取搜索区中相关系数最大所对应的窗口中心点作为同名点; 2、金字塔影像: 【答】对二维影像进行低通滤波,并逐渐增大采样间隔,形成的影像像素数依次减少的影像序列; 3、立体正射影像对: 【答】由正射影像和通过该正射影像生成的立体匹配片两者组成的立体相对; 4、同名核线: 【答】同一核面与左右影像相交形成的两条核线,其中核面指物方点与摄影基线所确定的平面; 5、立体透视图: 【答】运用透视原理和一定的数学模型(共线方程)将物方具有三维信息的点转换到指定的平面上,并通过消影处理获得立体透视效果。 二、 简答题: 1、 以图1所示数字高程模型矩形格网为例,请说明图1中所画等高线的跟踪 过程.如果有特征线存在,应该如何处理? (0,0)(1,0)(2,0)(3,0) 图1 基于矩形格网的等高线跟踪
武大摄影测量习题
简答题 1. 航空摄影中,为什么要求相邻像片之间以及相邻航线之间有一定的重叠? 答:为便于立体测图及航线间的接边,除航摄像片要覆盖整个测区外,还要求像片间有一定的重叠,航向重叠一般要求在60%以上,旁向重叠要求在24%以上。地面起伏大时,重叠度还要大,才能保持像片立体量测与拼接。 2. 航摄像片有哪几个内、外方位元素,各有何用? 答:内方位元素包括三个参数,即摄影中心S 到像片的垂距(主距)f 及像主点o 在像框标坐标系中的坐标00,y x ,用其来恢复摄影光束。确定摄影光束在摄影瞬间的空间位置和姿态的参数,称为外方位元素,一张的外方位元素包括六个参数,其中有三个是直线元素,用于描述摄影中心的空问坐标值;另外三个是角元素,用于表达像片面的空间姿态。 3.摄影测量中常用的坐标系有哪些?各有何用? 答:摄影测量中常用的坐标系有两大类。一类是用于描述像点的位置,称为像方空间坐标系;另——类是用于描述地面点的位置.称为物方空间坐标系。 (1) 像方空间坐标系 ①像平面坐标系 像平面坐标系用以表示像点在像平面上的位置,通常采用右手坐标系,y x ,轴的选择按需要而定.在解析和数字摄影测量中,常根据框标来确定像平面坐标系,称为像框标坐标系。 ②像空间坐标系 为了便于进行空间坐标的变换,需要建立起描述像点在像空间位置的坐标系,即像空间坐标系。以摄影中心S 为坐标原点,y x ,轴与像平面坐标系的y x ,轴平行,z 轴与主光轴重合,形成像空间右手直角坐标系xyz S - ③像空间辅助坐标系 像点的像空间坐标可直接以像平面坐标求得,但这种坐标的待点是每张像片的像空间坐标系不统一,这给计算带来困难。为此,需要建立一种相对统一的坐标系.称为像空间辅助坐标系,用XYZ S -表示。此坐标系的原点仍选在摄影中心S 坐标轴系的选择视需要而定。 (2) 物方空间坐标系 ①摄影测量坐标系 将像空间辅助坐标系XYZ S -沿着Z 轴反方向平移至地面点P ,得到的坐标系p p p Z Y X P -称为摄影测量坐标系 ②地面测量坐标系 地面测量坐标系通常指地图投影坐标系,也就是国家测图所采用的高斯—克吕格?3带或? 6带投影的平面直角坐标系和高程系,两者组成的空间直角坐标系是左手系,用t t t Z Y X T -表示。 ③地面摄影测量坐标系 由于摄影测量坐标系采用的是右手系,而地面测量坐标系采用的是左手系,这给由摄影测量坐标到地面测量坐标的转换带来了困难。为此,在摄影测量坐标系与地面测量坐标系之间建立一种过渡性的坐标系,称为地面摄影测量坐标系,用tp tp tp Z Y X D -表示,其坐标原点在
武汉大学摄影测量学试卷及答案(2005-2011).
武汉大学2005~2006学年上学期 《摄影测量基础》答卷(A) 一、填空题(20分,每空1分) 1、摄影测量中常用的坐标系有 像平面直角坐标系、 像空间直角坐标系 、 像空间辅助坐标系、 地面摄影测量坐标系 、 地面测量坐标系 。 2、解求单张像片的外方位元素最少需要 3 个 平高地面控制 点。 3、GPS 辅助空中三角测量的作用是 大量减少甚至完全免除地面控制点,缩短成图周期,提高生产效率,降低生产成本。 4、两个空间直角坐标系间的坐标变换最少需要 2 个 平高 和 1 个 高程 地面控制点。 5、摄影测量加密按平差范围可分为 单模型 、 单航带 和 区域网 三种方法。 6、摄影测量的发展经历了 模拟摄影测量 、 解析摄影测量 和 数字摄影测量 三个阶段。 7、恢复立体像对左右像片的相互位置关系依据的是 共面条件 方程。 8、法方程消元的通式为=+1,i i N 1,1 ,,1,+?+?i i i i T i i i i N N N N 。 二、名词解释(20分,每个4分) 1、内部可靠性:一定假设下,平差系统所能发现的模型误差的最小值。 2、绝对定向元素:确定模型在地面空间坐标系中的绝对位置和姿态的参数。 3、像主点:相机主光轴与像平面的交点。 4、带状法方程系数矩阵的带宽:带状法方程系数矩阵的主对角线元素沿某行(列)到最远非零元素间所包含未知数的个数。 5、自检校光束法区域网平差:选用若干附加参数构成系统误差模型,在光束法区域网平差中同时解求这些附加参数,从而在平差过程中自行检定和消除系统误差影响的区域网平差。 三、简答题(45分,每题15分)
1、推导摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程,并简要叙述其在摄影测量中的主要用途。 【答】 设摄影中心S 在某一规定的物方空间右手直角坐标系中的坐标为,任一地 面点A 在该物方空间坐标系中的坐标为,A 在像片上的构像a 在像空间坐标和像空间辅助坐标分别为),,(s s s Z Y X ),,(A A A Z Y X ),,(f y x ?和,摄影时S 、a 、A 三点共线(如下图) ),,(Z Y X X tp 又像空间坐标与像空间辅助坐标系满足: ??????????=?? ??? ??????Z Y X f y x R (2) 式中,为由像片外方位角元素组成的正交变换矩阵。 ???? ??????=32 1 32132 1c c c b b b a a a R 将(2)式写成纯量形式并用第一、二式分别除以第三式,可得 ) ()()() ()()() ()()() ()()(333222333111S A S A S A S A S A S A S A S A S A S A S A S A Z Z c Y Y b X X a Z Z c Y Y b X X a f y Z Z c Y Y b X X a Z Z c Y Y b X X a f x ?+?+??+?+??=?+?+??+?+??= (3) (3)式就表示了摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程。 共线条件方程在摄影测量中的主要应用如下: ? 单片后方交会和立体模型的空间前方交会;
武汉大学摄影测量期末试卷及答案(2005-2011)
武汉大学2005~2006 学年上学期 《摄影测量基础》试卷(A) 学号:姓名:院系:遥感信息工程专业:遥感科学与技术得分: 一、填空题(20 分,每空1 分) 1、摄影测量中常用的坐标系有、、 、、。 2、解求单张像片的外方位元素最少需要个点。 3、GPS 辅助空中三角测量的作用是。 4、两个空间直角坐标系间的坐标变换最少需要个和个地面控制点。 5、摄影测量加密按平差范围可分为、和三种方法。 6、摄影测量的发展经历了、和三个阶段。 7、恢复立体像对左右像片的相互位置关系依据的是方程。 8、法方程消元的通式为N i ,i +1 = 。 二、名词解释(20 分,每个4 分) 1、内部可靠性: 2、绝对定向元素: 3、像主点: 4、带状法方程系数矩阵的带宽: 5、自检校光束法区域网平差: 三、简答题(45 分,每题15 分) 1、推导摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程,并简要叙述其在摄影测量中的主要用途。 2、像片外方位元素的作用是什么?用图示意以y 轴为主轴的航摄像片的外方位元素。 3、如果拥有一套POS 系统,你打算如何用其快速确定地面点的三维坐标(简要叙述基本思想和具体解算过程)?
四、综合题(15 分) 设某区域由两条航线组成(如图 1 所示),试根据光束法区域网平差原理回答下列问题: ① 当控制点无误差时,观测值个数 n 、未知数个数 t 、多余观测数 r ; ② 按最小带宽原则在图 a 中标出像片排列顺序号并求出带宽; ③ 在图 b 中绘出改化法方程系数矩阵结构图(保留像片外方位元素)。 像片号 ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ① 1 2 ② ③ ④ 5 6 ⑤ ⑥ 3 4 ⑦ 平高地面控制点 ⑧ 高程地面控制点 待定点 ⑨ (a ) (b ) 图 1
武汉大学近景摄影测量习题精选
习题精选 1.近景摄影测量的定义及包含的三个组成部分是什么? 2.近景摄影测量与航空摄影测量的异同点有那些? 3.近景摄影测量技术的有点与不足各是什么? 4.进行近景摄影测量精度统计的主要方法有哪三个?并简要叙述其计算原理? 5.影响近景摄影测量精度的因素有那些? 6.近景摄影测量中涉及哪些常用坐标系? 7.共线条件方程、共面条件方程各自代表的几何含义是什么? 8.近景摄影测量中的影像获取设备是如何分类的? 9.数字近景摄影测量与数字化近景摄影测量的区别是什么? 10.近景摄影测量的摄影设备分为哪几类?各类设备的特点是什么? 11.Wild P31型量测摄影机的性能特点有那些? 12.UMK型量测摄影机的性能特点有那些? 13.摄影机改变主距的方法有那些? 14.什么是立体量测摄影机? 15.固态摄像设备有那些特点? 16.固态摄像机按分辨率可以分为哪几类? 17.近景摄影测量的两种基本摄影方式是什么? 18.试推导正直摄影条件下的精度估算式。 19.调焦距、超焦距是如何定义的? 20.景深的概念是什么?如何计算景深? 21.设物镜焦距f=100mm,取光圈号数k=16,模糊圈直径E=0.05mm,当调焦距D=2m 时, 计算超焦距H、前景距D1、后景距D2及景深ΔD。 22.确定正确曝光时间的推算比较法是如何操作的?如分步推算,保持曝光量不变,遵循 的原则是什么? 23.如用一架普通135相机对某目标进行测光,安置的感光度为ISO100,光圈号数安 置为8, 此时测得的曝光时间为1/60秒。用P31摄影机对此目标摄影,选用的感光材料的 感光度 为ISO400,安置的光圈号数为11,试确定P31相机的正确曝光时间?(分步推算) 24.获取目标物立体像对的方法主要有那些? 25.动态目标立体像对的获取方法有那些? 26.进行被测目标表面处理的目的是什么?方法有那些? 27.近景摄影测量中,如何设计和使用人工标志? 28.近景摄影测量中实施控制的目的是什么? 29.近景摄影测量中对控制点的测量精度要求是什么? 30.什么是相对控制?试举几例。 31.近景摄影测量中,测量控制点一般方法的基本原理与操作步骤是什么? 32.测量控制点一般方法中,确定控制点高程时,为何无需确定经纬仪高程? 33.控制点测量中,测站基线如何确定? 34.室内控制场建立的目的和建设中遵循的原则是什么? 35.建立活动控制系统的目的是什么? 36.解析法近景摄影测量按处理方法的原理可以分为哪几类? 37.基于共线条件方程的解析处理方法主要有哪几种? 38.解释共线条件方程中各符号的含义。 39.写出以像点坐标为观测值的共线条件方程误差方程一般式,并指出各符号的含义。 40.什么是多片空间前方交会?写出其误差方程式。影响其计算精度的因素有那些? 41.什么是单像空间后方交会?写出同时解求内外方位元素及畸变系数k1的误差方程
武汉大学测绘学院摄影测量集中实习
课程编号:20162024123课程性质:专业必修 数字摄影测量实习 实习报告 学院:测绘学院 专业:测绘工程 地点:校内 班级: 组号: 姓名: 学号: 教师: 2017年 6月 19日至 2017年 7 月 8日
第1 章空三报告 (4) 1.1 NAT空中三角成果数据流程 (4) 1.2空三加密需要注意 (4) 1.3 空三流程图 (5) 1.4空三评查步骤 (5) 1.4.1需要平差的原因 (5) 1.4.2粗差的影响 (5) 1.4.3平差方法-循环粗差剔除 (5) 1.4.4自己的方案 (6) 第2 章Mapmatrix进行DOM,DEM生成 (6) 2.1外方位元素的确定 (6) 2.1.1内定向:确定与物点相对应的像点坐标 (6) 2.1.2扫描分辨率为什么不能错: (6) 2.1.3创建立体像对: (6) 2.1.4相对定向: (6) 2.1.5绝对定向: (7) 借助物空间坐标为已知的控制点来确定空间辅助坐标系与实际物空间坐 标的变换关系称为立体模型的绝对定向。 (7) 2.1.6后方交会 (7) 2.1.7后方交会绝对定向刺6个点能成功: (7) 2.1.8核线、匹配采样 (7) 2.1.9影像匹配 (8) 2.2 DEM编辑生成 (8) 2.2.1选取新建的DEM成品自动生成 (8) 2.2.2 DEM编辑 (8) 2.2.3 DEM介绍 (8) 2.2.4问老师得到的对Dem编辑的理解 (8) 2.2.5 Dem拼接裁剪 (9) 2.3 DOM的生成编辑 (9)
2.3.1 DOM概念 (9) 2.3.2选取新建的DOM产品自动生成 (9) 调整扫描分辨率与参数 (9) 2.3.3规格要求 (9) 2.3.4生成72张影像的DOM导入易拼图进行正射影像编辑 (9) 2.3.5 EPT编辑工具使用总结 (10) 2.3.6 DOM建筑等人工地物变形对比分析 (11) 2.3.7 DOM色彩对比分析 (11) 2.3.8最后生成的产品 (11) (经过房屋过滤后的DEM) (11) 第3 章DLG的立测生成 (12) 3.1 DLG的概念 (12) 3.2本次试验生成的DLG成果,导出为DXF格式 (12) 3.3 立测的精度检核 (13) 3.4 DLG生成 (13) 3.4.1经验总结 (13) 第4 章编程实习 (14) 4.1实验目的 (14) 4.2具体要求 (14) 4.3计算原理 (15) 4.4算法解释 (16) 4.5算法流程: (17) 4.6 MATLAB源代码 (18) 4.7影像匹配原理 (21) 常用的影像匹配方法可分为两种:基于影像灰度匹配的影像匹配算法和基于影像特征的匹配算法。 (21) 4.8主程序 (21) 4.9函数文件 (27)
- (武汉大学)摄影测量学教学课件-第五章-解析法绝对定向
- 武汉大学摄影测量学试卷及答案(2005-2011)
- 武汉大学摄影测量学01
- 武汉大学数字摄影测量学试卷及答案(2005-2011)
- 武大版摄影测量学重点
- (武汉大学)摄影测量学教学课件-第一章-绪论
- 武汉大学摄影测量学共16页
- 武汉大学摄影测量学04
- 摄影测量学(武大)01袁修孝
- 武汉大学摄影测量学试卷及答案
- (武汉大学)摄影测量学教学课件-第四节-定位算子
- 武汉大学摄影测量学.ppt
- 武汉大学数字摄影测量学ppt课件
- 武汉大学摄影测量学课件(同名核线的确定与重采样)
- 武汉大学摄影测量学12
- 武汉大学摄影测量学06
- 武汉大学摄影测量学期末试卷
- 武汉大学数字摄影测量学试卷及答案
- 武汉大学《摄影测量学》复习题库
- 武大版摄影测量学重点