STM32----8---SPI

4月25日---- 4月27日SPI总线
经过两天的学习,哈哈SPI终于搞定,用STM32控制IIC EEPORM,将EEPROM中的数据读到SPI的FLASH中。
---------------------------------------------------------------------------------------------------------------------- SPI(Serial Peripheral Interface)总线:串行外围总线接口
一、SPI总线的简介:
SPI是由摩托罗拉公司开发的全双工同步串行总线,没有总线仲裁机制,所以工作在单主机系统中。主设备启动与从设备的同步通讯,从而完成数据的交换。对于只能做从机的器件接口来说,SPI接口由SDI(串行数据输入),SDO(串行数据输出),SCK(串行移位时钟)和CS(从使能信号)。通讯时,数据由SDO输出,SDI输入,数据在时钟的上升沿或者下降沿由SDO输出,在紧接着的下降沿或者上升沿由SDI读入,这样经过8/16帧,以完成8/16位数据的传输。
对于有的微控制器来说,它的硬件SPI即可做主机,也可以做从机,即可实现主从配置,MOSI:主出从入、MISO:主入从出、SCK:串行时钟、SS:从属选择。(当做主机输出时,该信号用于选中需要访问的从机,SS输入高电平,外部决定其为主机;当做从机时,SS为输入或者一般的IO口使用)。常用的SPI接法:在软件配置的条件下SS不使用。
1、SPI总线的通信时序
(1)在SPI通信中,在全双工模式下,发送和接收是同事进行的
(2)数据传输的时钟基来自主控制器的时钟脉冲;摩托罗拉没有定义任何通用的SPI 时钟的规范,最常用的时钟设置是基于时钟极性CPOL和时钟相位CPHA两个参数。
a)CPOL=0,表示时钟的空闲状态为低电平
b)CPOL=1,表示时钟的空闲状态为高电平
c)CPHA=0,表示同步始终的第一个边沿(上升或者下降)数据被采样
d)CPHA=1,表示同步始终的第二个边沿(上升或者下降)数据被采样
即CPOL和CPHA的设置决定了数据采样的时钟沿。
(3)在多个从设备的系统中,每个设备需要独立的使能信号,硬件比I2C系统复杂(4)没有应答机制确定是否收到数据,没有I2C总线系统安全。
(5)SPI主机与之通信的从机的时钟极性和相位应该一致
i.主设备SPI时钟和极性的配置由从机来决定
ii.主设备的SDO、SDI和从设备的SDO、SDI一致
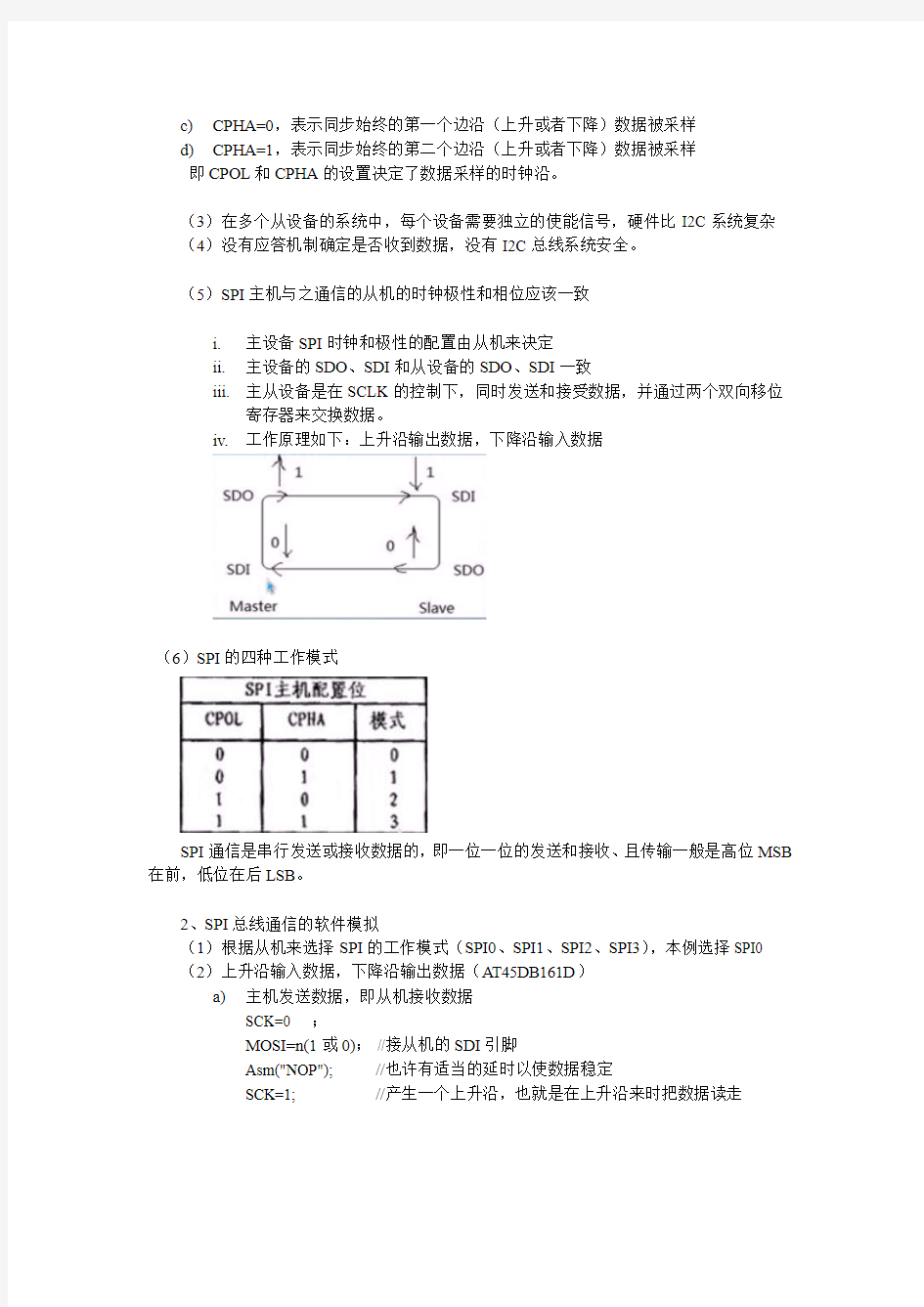
iii.主从设备是在SCLK的控制下,同时发送和接受数据,并通过两个双向移位寄存器来交换数据。
iv.工作原理如下:上升沿输出数据,下降沿输入数据
(6)SPI的四种工作模式
SPI通信是串行发送或接收数据的,即一位一位的发送和接收、且传输一般是高位MSB 在前,低位在后LSB。
2、SPI总线通信的软件模拟
(1)根据从机来选择SPI的工作模式(SPI0、SPI1、SPI2、SPI3),本例选择SPI0 (2)上升沿输入数据,下降沿输出数据(AT45DB161D)
a)主机发送数据,即从机接收数据
SCK=0 ;
MOSI=n(1或0); //接从机的SDI引脚
Asm("NOP"); //也许有适当的延时以使数据稳定
SCK=1; //产生一个上升沿,也就是在上升沿来时把数据读走
b)主机接收数据,即从机发送数据(接收一位数据)
SCK=1;//
SCK=0;//产生一个下降沿
Bit=MISO; //连接从机的SDO引脚
c)主机向从机写入一个字节的数据
Void SPI_Write(unsigned char data)
{
Uchar i;
Bit temp;
For(i=0;i<8;i++)
{
Temp=(bit)(dat&0x80);
Sck=0;
MOSI=temp;
Asm("NOP");
SCK=1; //产生一个上升沿
Data=data<<1;//传输下一位数据
}
}
d):从机向主机发送一个字节的数据
Uchar spi _read(void)
{
Uchar i,data =0;
For(i=0;i<8;i++)
{
Data=data<<1;
Sck=1;
SCK=0;
Data|=MISO;//连接从机的SDO引脚
}
Return data;
}
SPI3
SPI1
SPI2
SPI0
二、STM32中的硬件SPI
1、特点:
(1)2个SPI接口:SPI1位于告诉总线的APB2总线上、SPI2位于低俗的APB1总线上。
(2)硬件接口有:3根弦的全双工同步通讯;2根线的单双工同步通讯;1根线的双向数据线(另外一根时钟线)
(3)数据帧宽度可编程:支持8位和16位数据传输格式。(SPI_CR1的DFF位)(4)可编程的数据传输顺序:高位在前或者低位在前(SPI_CR1寄存器中的
LSBFIRST位)
(5)可作为主设备也可作从设备(SPI_CR1寄存器的MSTR位)
(6)可编程的位传输速率:在主/从模式下,最大都可达18MHZ(SPI_CR1寄存器中的BR[2:0]位)
(7)可通过硬件或软件控制主从设备的NSS引脚,使用软件时,可动态改变主从模式
(8)可编程的时钟极性CPOL和时钟相位CPHA,可选择SPI四种模式中的一种
(9)带终端性能的发送和接受标志:发送缓冲区空(SPI_SR寄存器中的TXE位),接收缓冲区非空(SPI_SR中的RXNE位)。
(10)SPI总线忙状态标志位(SPI红的BSY位)
(11)带中断性能的主模式故障或溢出错误标志位和CRC错误标志:
a)主模式故障:在硬件模式下:主设备的NSS脚被拉低;在软件模式下,
SSI位被复位(SPI_SR中的MODF被硬件置位)。
b)溢出错误:从设备在接收新数据时,而前一个数据还没有被读出,即发出
溢出错误。
(12)拥有可靠通信的硬件CRC特性:在发送模式下CRC的值作为最后一个字节发送;对接收到的最后一个字节自动进行CRC校验(只使用与全双工通信,CRC8算法用于8位帧格式,CRC16算法用于16位帧格式)
2、使用硬件SPI容易出错的地方
(1)SPI主设备和与之通信的从设备的时钟极性和时钟相位应该一致,并以从设备为基准
(2)SPI仅在数据发送时才有时钟输出,一旦传输完毕,时钟就停止
(3)SPI从设备在主设备需要接收数据时才能发送数据,主设备和从设备同时进行的。
(4)SPI主设备向从设备发送数据时,直接发送即可,丢弃堵回来的数据即可。但在接收数据时,实质上也是发送数据,为接收数据提供时钟信号。
3、NSS的软硬件管理
NSS引脚可做为输入,也可作为输出引脚。(NSS作为输入模式下,才能实现多主模式)。(1)硬件模式(SPI_CR1中SSM位复位,即禁止软件模式缺点:模式固定了,灵活性差)
(2)软件模式
此时由SSMbit 位决定,SSM 位为0,禁止软件模式;SSM 为1,开启软件模式,在这种模式下外部NSS 引脚作为GPIO 用,而内部的NSS 信号电平由SPI_CR1的SSI 位来驱动。
优点:主模式和从模式下的NSS 引脚可做GPIO 用,可动态的改变主从模式,在同一
个应用中,将SPI 从从模式切换到从模式或从从模式切换到主模式,而不改变硬件。
注意:在与被控制器件连接时,只用SCK 、MOSI 、MISO 三条线即可,用软件控制NSS 使之处于主机模式,通过GPIO 选择被控器件即可。
4、SPI 接口硬件设计
(1)全双工、三线传输:以下为硬件模式
配置为:SPI _CR1:BIDIMODE=0.RXONL Y=0,SSM=0
NSS 为输入模式 NSS 为输入模式
NSS 引脚GPIO 用
NSS 引脚GPIO 用
由SSI 位决定
SPI_CR1:SSOE=0 输出使能为0
(2)单工通讯:(减少IO口的数量)
a)双向通讯:一根时钟线和一根双向数据线BIDIMODE=1(单线双向),
BIDIOE=0(只收模式)、BIDIOE=1(只发模式)
b)只接收:1根时钟线和一根单项数据线(即全双工的只接收模式,配置
BIDIMODE=0,RXONL Y=1)
5、STM32 SPI功能框图
工作原理:在接收时(MISO),接收到的数据被存放在一个内部的接收缓冲器中;在发送时(MOSI),在被发送之前,数据将首先被存放在一个内部的发送缓冲器中。对SPI_DR寄存器的读操作,将返回接收缓冲器的内容;写入SPI_DR寄存器的数据将被写入发送缓冲器中。主模式下开始传输
● 全双工模式(BIDIMODE=0并且RXONL Y=0)
─ 当写入数据到SPI_DR寄存器(发送缓冲器)后,传输开始;
─ 在传送第一位数据的同时,数据被并行地从发送缓冲器传送到8位的移位寄存器中,
然后按顺序被串行地移位送到MOSI引脚上;
─ 与此同时,在MISO引脚上接收到的数据,按顺序被串行地移位进入8位的移位寄存器中,然后被并行地传送到SPI_DR寄存器(接收缓冲器)中。
注意:也就是说,在主机模式下,发送和接收是同时进行的,所以我们发送了一个数据,也就能接收到一个数据。而STM32内部硬件是这个过程的支撑!
● 单向的只接收模式(BIDIMODE=0并且RXONL Y=1)
─ SPE=1时,传输开始;
─ 只有接收器被激活,在MISO引脚上接收到的数据,按顺序被串行地移位进入8位的移位寄存器中,然后被并行地传送到SPI_DR寄存器(接收缓冲器)中。
● 双向模式,发送时(BIDIMODE=1并且BIDIOE=1)
─ 当写入数据到SPI_DR寄存器(发送缓冲器)后,传输开始;
─ 在传送第一位数据的同时,数据被并行地从发送缓冲器传送到8位的移位寄存器中,
然后按顺序被串行地移位送到MOSI引脚上;
─ 不接收数据。
● 双向模式,接收时(BIDIMODE=1并且BIDIOE=0)
─ SPE=1并且BIDIOE=0时,传输开始;
─ 在MOSI引脚上接收到的数据,按顺序被串行地移位进入8位的移位寄存器中,然后被并行地传送到SPI_DR寄存器(接收缓冲器)中。
─ 不激活发送器,没有数据被串行地送到MOSI引脚上。
三:STM32 SPI的驱动程序
------spi.h
#ifndef __SPI_H
#define __SPI_H
#include "stm32f10x_lib.h"
void SPIx_Init(void); //初始化SPI口
u8 SPIx_ReadWriteByte(u8 TxData);//SPI总线读写一个字节
#endif
-----spi.c
#include "spi.h"
/*************************************************************************** - 功能描述:STM32f103 SPI接口配置的初始化函数
- 隶属模块:STM32 SPI操作
- 函数属性:外部,使用户使用
- 参数说明:无
- 返回说明:无
- 函数实现步骤:
(1)SPI1在没有重映射的条件下NSS->PA4、SCK->PA5、MISO->PA6、MOSI->MOSI,由于STM32要处于主机模式且用软件模式,所以NSS不用
(2)初始化GPIO管脚和SPI的参数设置:建立SPI和GPIO的初始化结构体
★(3)在配置GPIO的PA5、PA6、PA7时将其配置为复用输出,在复用功能下面,输入输出的方向,完全由内部控制.不需要程序处理.
(4)配置FLASH的片选信号线PA2,并设为高电平,也就是不选中FLASH
(5)打开GPIO和SPI1的时钟
(6)配置SPI1的参数SPI的方向、工作模式、数据帧格式、CPOL、CPHA、NSS软件还是硬件、SPI时钟、数据的传输位、以及CRC
(7)利用SPI结构体初始化函数初始化SPI结构体、并使能SPI1
(8)最后启动传输发送一个0xff,其实也可以不发
以下是SPI模块的初始化代码,配置成主机模式,访问SD Card/W25X16/24L01/JF24C
***************************************************************************/ void SPIx_Init(void)
{
//(2)
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
//(3)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//(4)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //SPI CS
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //通用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_2);
//(5)
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_SPI1, ENABLE );
//(6)
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //选择了串行时钟的稳态:时钟悬空高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //数据捕获于第二个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB 位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx 寄存器
//(7)
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
SPIx_ReadWriteByte(0xff);//启动传输
}
/*************************************************************************** - 功能描述:STM32f103 SPI读写字节函数
- 隶属模块:STM32 SPI操作
- 函数属性:外部,使用户使用
- 参数说明:TxData:要写入的字节
- 返回说明:读取到的字节
- 函数说明:由于主机SPI通信时,在发送和接受时是同时进行的,即发送完了一个字节的数据后,也应当接受到一个字节的数据
(1)stm32先等待已发送的数据是否发送完成,如果没有发送完成,并且进入循环200次,则表示发送错误,返回收到的值为0;
(2)如果发送完成,stm32从SPI1总线发送TxData
(3)stm32再等待接收的数据是否接收完成,如果没有接收完成,并且进入循环200次,则表示接收错误,则返回值0
(4)如果接收完成了,则返回STm32读取的最新的数据
stm32
------->等待已发送的数据是否完成
OK
------->
stm32发送数据
------->等待待接收的数据是否完成
OK
------->
stm32读取数据
***************************************************************************/
u8 SPIx_ReadWriteByte(u8 TxData)
{
u8 retry=0;
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI 标志位设置与否:发送缓存空标志位
{
retry++;
if(retry>200)
return 0;
}
SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个数据
retry=0;
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET); //检查指定的SPI标志位设置与否:接受缓存非空标志位
{
retry++;
if(retry>200)return 0;
}
return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}
有了以上的STM32 SPI驱动就可以去驱动SPI的任意器件,但是要注意SPI器件的操作驱动函数还要根据所用的SPI器件手册进行书写。
字符统计的函数strlen 和sizeof的书写:
(1)strlen函数,不区分是数组还是字符串,读到\0为止返回长度,而且strlen是不把\0计入长度。
(2)Sizeof:
a)Char *str1="abcdef"; sizeof(str1)= 4是指针的字节数
b)Char str2[]="abcde"; sizeof(str2)= 6
c)Char str2[8]={s}; sizeof(str2)= 8
d)Char ss[]="0123456789"; sizeof(ss)= 11