传感器在电脑横机控制系统中的应用_郑敏博
传感器在电脑横机控制系统中的应用
郑敏博段磊
(西安工程大学710048)
摘要本文介绍了霍尔传感器、振动传感器、光电传感器、微动开关和编码器等在电脑横机控制系统中的应用,以及在横机编织过程中对机械故障和织疵的检测和反馈作用。
关键词电脑横机传感器应用
1前言
针织行业是我国国民经济的重要行业之一,对我国的现代化进程起着至关重要的作用。电脑横机是机电一体化、智能化程度较高的一种新型纺织机械,其除了具有自动化程度高,花型变换方便,产品质量易于控制的优点外,可编织产品的多样性受到国内外生产厂家的青睐,因此其应用越来越广泛。而在应用过程中,越来越多的机械故障和织物质量问题也突显出来。而在控制产品质量和保证安全、快速、精确生产过程中,传感器起到了关键性作用。
在全自动电脑横机的精确控制要求下,传感器对其电脑横机动作进行时刻的监视,并且对全自动电脑横机在运行过程中出现的故障及时反馈并报警。其中使用到的传感器有五大类:霍尔传感器、振动传感器、光电传感器、微动开关及编码器等。
2传感器的工作原理及在电脑横机上的应用
2.1微动开关
2.1.1微动开关原理
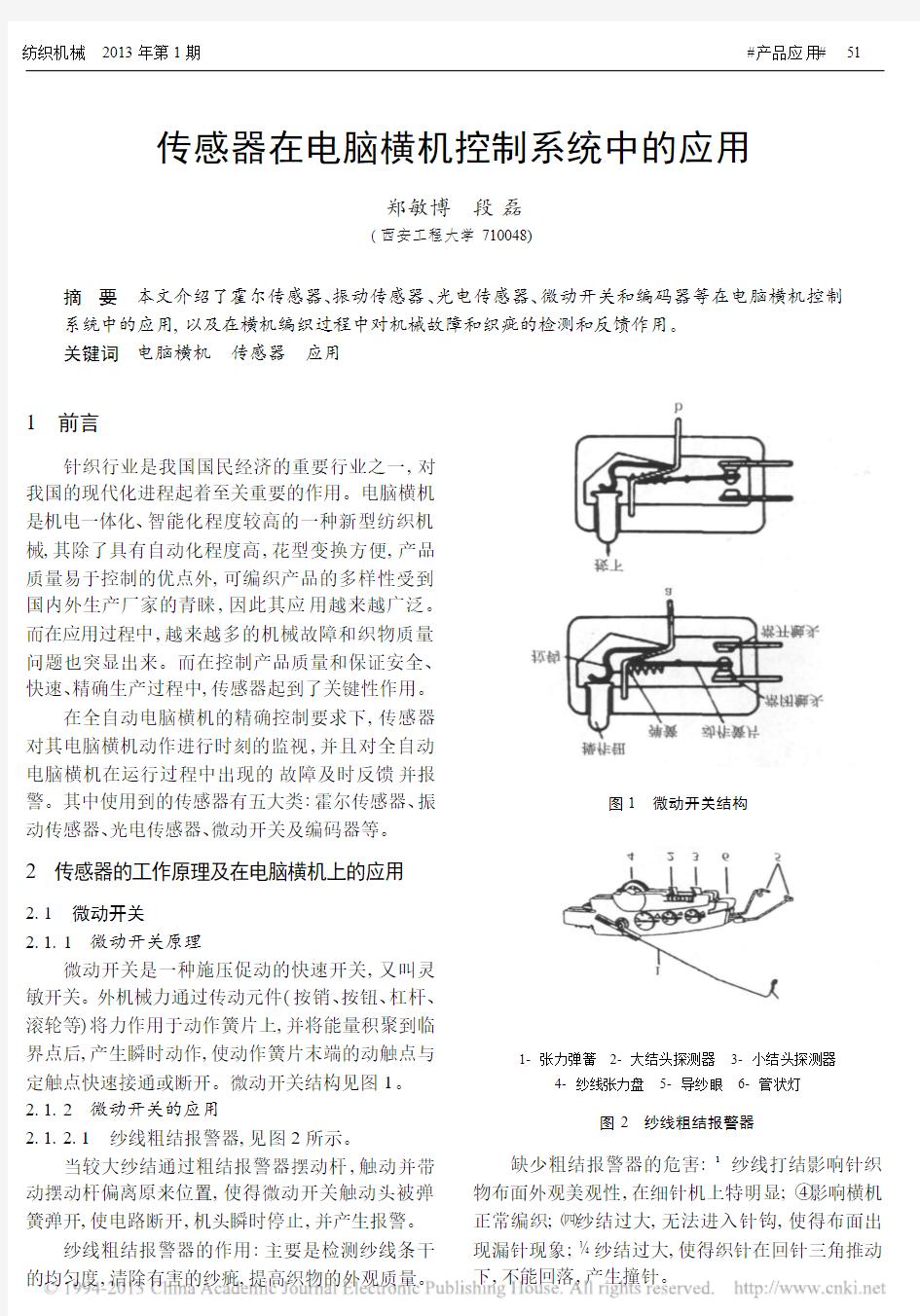
微动开关是一种施压促动的快速开关,又叫灵敏开关。外机械力通过传动元件(按销、按钮、杠杆、滚轮等)将力作用于动作簧片上,并将能量积聚到临界点后,产生瞬时动作,使动作簧片末端的动触点与定触点快速接通或断开。微动开关结构见图1。2.1.2微动开关的应用
2.1.2.1纱线粗结报警器,见图2所示。
当较大纱结通过粗结报警器摆动杆,触动并带动摆动杆偏离原来位置,使得微动开关触动头被弹簧弹开,使电路断开,机头瞬时停止,并产生报警。
纱线粗结报警器的作用:主要是检测纱线条干
的均匀度,清除有害的纱疵,提高织物的外观质量。
图1微动开关结构
1-张力弹簧2-大结头探测器3-小结头探测器
4-纱线张力盘5-导纱眼6-管状灯
图2纱线粗结报警器
缺少粗结报警器的危害:1纱线打结影响针织物布面外观美观性,在细针机上特明显;o影响横机正常编织;?纱结过大,无法进入针钩,使得布面出现漏针现象;?纱结过大,使得织针在回针三角推动下,不能回落,产生撞针。
2.1.2.2 天线台的断纱报警
当断纱时,天线在弹簧的带动下弹离,天线压迫触动头使电路断开,机头瞬时停止,并产生报警。天线台断纱报警的作用:主要起到断纱时报警使机头停止运动,保障纱线连续供给编织区。
缺少天线台报警器的危害:如果在连续编织过程中,出现断纱,而机器没有提示报警,机头在不带纱的情况下继续编织,就会产生脱圈、落片。2.1.2.3 探针(见图3所示
)
图3 机头探针
采用微动开关,机头左右两边两个探针可以左右上下摆动,正常情况下,探针压迫微动开关触动头,使电路处于导通的状态,当出现浮纱时织针无法正常脱圈,当线圈堆积在编织区出现大结时,或者针床上有未回落的织针和异物时,探针触到将会偏离正常位置,微动开关触动头致使电路断开,机头停止,显示器显示/探针报警0。
探针的作用:监视织针编织情况;监视织针在上三角与回针三角作用下,是否回到初始位置;监视编织时织物表面是否有异物,编织纱线线圈是否有脱圈不良或大量堆积现象等。
缺少探针的危害:浮纱过多,影响织物外观效果;出现撞针现象。
2.1.2.4 左右撞击开关(见图4所示)
左右撞击开关是接在110V 控制电路常态中的微动开动开关,常态处于闭合状态,左右撞击开关,使得110V 控制电路短路,机头停止运动,电脑横机就会自动关机。
左右撞击开关的作用:防止机头运行到针床以外,撞损机头。
缺少左右撞击开关的危害:如果编织时起始针位置不合适,使得花型文件的列数大于机头可运行的针床针数,机头将会在针床以外区域运动,就会撞
损机头,还有可能从滑轨飞出,造成严重的事故。
图4 左右撞击开关
2.2 霍尔传感器
2.2.1 霍尔传感器的原理
霍尔位置传感器是一种检测物体位置的磁场传感器。用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔位置传感器以霍尔效应原理为其工作基础。
在导体上外加与电流方向垂直的磁场,会使得
导线中的电子与电洞受到不同方向的洛伦兹力而往不同方向上聚集,在聚集起来的电子与电洞之间会产生电场,此一电场将会使后来的电子电洞受到电力作用而平衡掉磁场造成的洛伦兹力,使得后来的电子电洞能顺利通过不会偏移,此称为霍尔效应。而产生的内建电压称为霍尔电压。2.2.2 霍尔传感器的应用
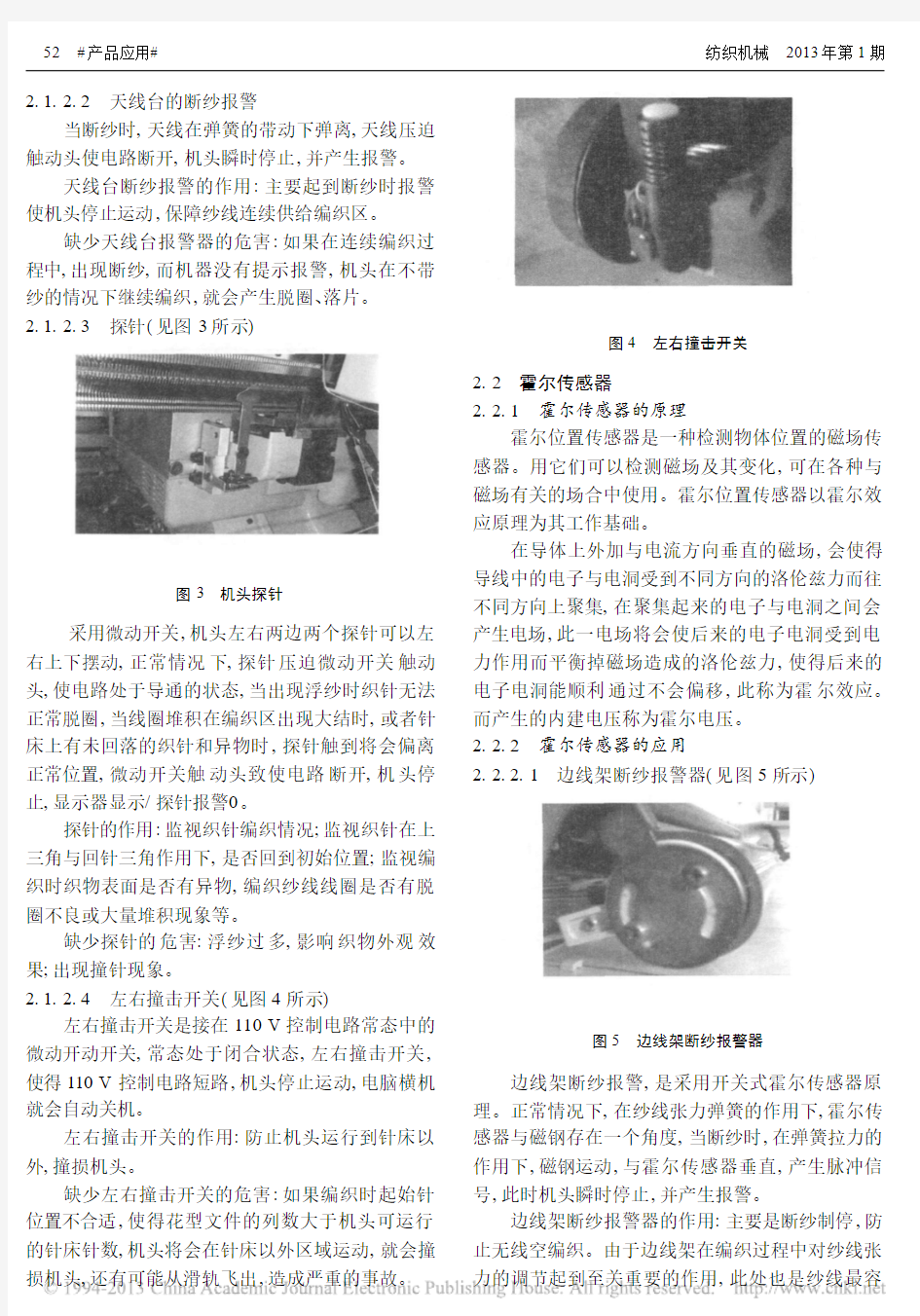
2.2.2.1 边线架断纱报警器(见图5所示)
图5 边线架断纱报警器
边线架断纱报警,是采用开关式霍尔传感器原理。正常情况下,在纱线张力弹簧的作用下,霍尔传感器与磁钢存在一个角度,当断纱时,在弹簧拉力的作用下,磁钢运动,与霍尔传感器垂直,产生脉冲信号,此时机头瞬时停止,并产生报警。
边线架断纱报警器的作用:主要是断纱制停,防止无线空编织。由于边线架在编织过程中对纱线张力的调节起到至关重要的作用,此处也是纱线最容
易断的地方,所以边线架断纱报警相当重要。
2.2.2.2前后门安全报警器
采用开关式霍尔传感器,常态是磁钢与开关式霍尔传感器处于垂直形态。当打开安全门时,磁钢与霍尔传感器分开,机头控制板检测不到信号,就会使机头瞬时停止运动。
前后门安全报警器的作用:防止杂物、尘埃落入针床和编织区域;防止机头来回运动,对操作工产生伤害。
缺少前后门安全报警器的危害:1在编织时,纱筒或废织片不慎掉入编织区域,将会被机头撞上,有可能会卡住机头。o过多的尘埃落入针床,会阻碍针床顺滑,出现卡针、撞针现象。?在编织中,操作工不慎将身体部位伸入针床,会产生意外事故等。
2.2.2.3左右限位传感器
采用开关式霍尔传感器,机头尾座上安装有磁钢,机头运动到磁钢与左右限位传感器垂直位置时,产生脉冲信号,机头到达/零0位置。
左右限位传感器的作用:机头复位的基准为/零0位;控制机头在滑轨上运行安全。
缺少左右限位传感器的危害:机头在复位过程中,不能在准确位置停止或转向,而出现撞击事故,对机头内部结构和整个机械造成严重损坏。
2.2.2.4读针器
采用开关式霍尔传感器,机头尾座上安装有磁钢,当机头运行到磁钢与左右限位传感器垂直时,产生脉冲信号,此位置就会被机头记忆为/读针0基准位。
2.2.2.5罗拉开合感应器
采用开关式霍尔传感器,装在起底板电脑横机或罗拉\起底板复合型电脑横机的针床燕尾槽右边后床,磁钢安装在后罗拉右边控制板上,当接到罗拉打开的信号时,罗拉在控制板齿推动下分开,当控制板转动到上面的磁钢与罗拉开合感应器平行时,产生脉冲信号,罗拉停止打开。
罗拉开合感应器的作用:监视并控制罗拉打开的状态。
缺少罗拉开合感应器的危害:无法监视控制罗拉打开的程度,如果罗拉打开程度过大,将会阻碍起底板的上升,起底板上的复合针将会拨破罗拉片,使复合针损坏。
2.2.2.6探测板感应器
采用开关式霍尔传感器,安装在罗拉右下方,探测板内沿与罗拉底板紧贴。当罗拉上卷布时,压迫探测板开口打开,当探测板上装磁钢与探测板感应器垂直,产生脉冲信号,在电脑横机显示器上显示/罗拉卷布报警0。
探测板感应器的作用:监视罗拉牵引织物的工作状态。
缺少探测板感应器的危害:罗拉卷布,没有及时监视报警处理,卷布严重,会使针床局部凸起,产生机头运行卡住,造成机头内三角、织针严重损伤。2.3振动传感器
2.3.1振动传感器的原理
振动传感器是将机械量接收下来,并转换为与之成比例的电量。由于它也是一种机电转换装置。所以我们也称它为换能器、拾振器等。振动传感器结构见图6所示。
图6振动传感器基本结构
2.3.2振动传感器的应用
撞针感应器采用振动传感器中的压电式传感器(45针床有3个压电式传感器,52针床有4个压电式传感器),电脑横机在运动过程中偶尔会发生撞针事故,此时针板会产生比较强烈的振动,利用此特性,通过一套振动保护系统实现了电脑横机的撞针保护功能。当机头中三角与织针发生碰撞时,压电式传感器对针床动态激振频率测试,当频率大于系统规定的频率,系统就会产生/撞针报警0。
2.4光电传感器
2.4.1光电传感器的原理
光电传感器是采用光电元件作为检测元件的传感器。它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。光电传感器一般由光源、光学通路和光电元件三部分组成。光电传感器的基本结构见图7所示。
图7光电传感器的基本结构
2.4.2 光电传感器的应用2.4.2.1 摇床传感器
摇床传感器采用槽式光电传感器。用来监测针床总针位,为摇床针数提供基准位。
摇床传感器的作用:保证针床正常编织,防止针床出现撞针的现象;在翻针过程中,避免漏针,成功完成翻针动作;确定翻针针数准确。2.4.2.2 落布传感器
落布传感器是采用漫反射式光电开关,用来检测落布时,罗拉牵引织物落布的情况。当织物在全自动电脑横机上编织完成后,自动落布时,落布传感器检测落布,如果在系统规定的时间没有将织物落完,控制系统没有收到落布传感器发出的信号就会发出落布不良的报警。2.5 光电编码器2.5.1 光电编码器原理
光电编码器,是通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90b 的两路脉冲信号。光电编码器结构见图8
所示。
图8 光电编码器结构
2.5.2 光电编码器应用
2.5.2.1 机头控制
机头采用位置闭环控制,由伺服单元利用伺服电机编码器输出信号构成速度环和电流环,再利用与机头运动导轨平行时的皮带轮及固连于机头的读针零位传感器检测机头位置,构成位置环。2.5.2.2 起底板控制
起底板的升降、复合针的开闭分别由各自的力
矩电机驱动,其工作位置采用霍尔传感器检测。在控制过程中起底板系统的DSP 改变可控硅的导通角实现力矩电机驱动电压的控制,实现程序预设的的牵拉力。
起底板升降电动机尾部的轴上安装了一个铝制圆盘,铝圆盘周边沿等分安装了8个磁钢,与电动机后罩壳上的两个霍尔开关构成了一套简易的增量式编码器。升降电动机每转一圈,霍尔开关产生两路8个互差90b 的脉冲,称为升降电动机A 信号和B 信号。A 、B 两路信号经高速光耦隔离后送入DSP 中,TM S320F2812中具备的正交编码脉冲(QEP)电路处理此信号,使DSP 感知起底板的速度、位置、方向等量,对升降电动机实施闭环控制。
3 结束语
传感器在电脑横机整个运作过程中起到至关重要的作用,是构成电脑横机检测报警的关键部件。它的灵敏度以及精确度关系到整个机器是否正常工作,织物是否有织疵等,最终影响到生产效率,增加了企业生产成本的投入。因此对于电脑横机的生产厂家来说,一台合格的电脑横机,必须配备灵敏、精确、耐用的传感器。而对于电脑横机的使用者来说,了解各种传感器的原理及作用,有助于维修人员快速的确定机械故障的问题所在,及时找出织疵的原因,缩短了维修时间,给企业带来一定的利润。
参考文献
[1] 彭军.传感器与检测技术[M ].陕西:西安电子科技大
学出版社,2003,11:116-254.
[2] 张开逊.现代传感技术在信息科学中的地位[J].工业
计量,2006(1).
[3] 吕建飞,傅建中.新型电脑横机的开发研制[J].针织工
业,2005(5):13-15.
[4] 刘玉磊,孟家光.电子控制装置在电脑横机上的应用
[J].国际纺织导报,2010(7).
第3章注塑机电气控制系统的结构与特点
第3章注塑机电气控制系统的结构与特点3.1 注塑机系统组成 注塑机又称啤机,它主要由四部分组成:电气部分、机械部分、液压部分和辅助部分。虽然种类繁多,品牌不一,功能各异,但最基本的工作原理是一样的。如第2章图2-1所示为注塑成型循环动作。 为完成这个循环,机械、电气及其它部件,都在这个循环周期内,围绕这个动作协调工作。电路设计要遵循动作图,机械运动要遵循,液压传动也要遵循。在完成整个动作循环后,周而复始的进行,就达到了自动状态。若用一部件来触发,如常用安全门来进行动作,成为半自动状态。电气、机械、液压关系非常密切,互相牵制,互相制约,另外,对成型产品也有很大影响。它们之间的关系如图3-1。 电气控制液压驱动机械 图3-1注塑机控制方框图 Fig. 3-1 block diagram of injection mould control 3.1.1 注塑机电气控制系统组成 注塑机的电控系统是整机的一个重要的组成部分,其性能之优劣,对整机至关重要。微型计算机技术在注塑机中的应用使注塑机的控制技术发展到一个新的水平。 电气部分的主要作用是:驱动油泵电机以供给液压部分的动力;供给电加热电源,并能自动控制注塑温度,供给调模电机电源,调校注塑机定模位置以及供给程序控制俄动作电源;程序控制,按动作循环图提供各种控制信号进行组合运算、放大、反馈并输出控制电压控制电磁阀线圈等负
第3章注塑机电气控制系统的结构与特点 载。 注塑机电控系统按其组成可分成以下三个部分:加热控制部分;电动机及其控制部分;顺序控制器部分。下面介绍一下注塑机控制工作原理。 (1)温度控制部分在注塑机中,料简温度控制是十分重要的。如果温度过高,料筒中的塑料会发生分解而变质;如果温度过低会使塑料塑化不良,流动性变差,制品成型不好。 目前,注塑机采用的加热方式多是料简外紧固几段加热圈,每段加热圈的温度可独立控制。一般中型机多为四段或三段加热,不同机型规格,其加热段数不同,每段温度的高低可根据工艺需要而调整。 为了控制温度,首先要解决好温度检测问题,常用的温度检测元件是热电偶。 温度控制目前最普遍的是选用温度仪表。温度仪表的种类很多,从显示方法上讲,有指针式和LED数码管显示的;从温度设置上讲,有旋钮式和拨码盘式;从控制方式上讲,有二位式、PDI式、时间比例式。选取这些仪表的原则是要根据温度控制的精度要求、配套的热电偶、加热的控制机构、价格等方面来综合考虑。一般若控制精度要求不高时.可采用二位式的控制仪表、加热控制用接触器开断来实现。对于温度精度要求较高时,特别是小注塑量、精密的注塑机,就需要选用则控制或时间比例控制的仪表。而此时加热控制的执行机构也应相应改动,如果控制仪表的输出是4—20mA电流的话,则要配用相应的晶闸管和相应的控制触发电路;如果控制仪表的控制输出是脉冲调宽方式的话,则要配用固态继电器或晶闸管触发电器,在这种情况下选用有触点开关是不允许的,因为开关太频繁了。 随着微机技术在注塑机上的推广应用,使用微机同时控制几个温段的加热,越来越受到人们的重视。用微机控制加热温度,可以得到很高的温控精度。同时,可方便地达到具有超温度报警和低温度报警功能。 (2)电动机控制部分 ①电动机的选取电动机的选取是指对电动机的类型和容量进行选择,根据工作条件确定外壳和安装的型式,根据负载的转速和动力电压来确定电动机的转速和电压,根据负载的大小确定电动机的容量。注塑机电动机常常是以液压泵作为负载的。 ②电动机的起动控制电动机起动一般为宣接起动或减压起动,对小
基于PLC的注塑机控制系统的设计论文
内容摘要 注塑机是集机、电、液于一体的典型系统,因具有能一次成型复杂制品、后加工量少、加工的塑料种类多等优点,目前已成为塑料成型加工的主要设备。传统中小型注塑机电气部分大多采用继电器控制,随着电子技术的不断进步与发展,其缺点越来越显著的表现出来,其主要表现为线路复杂,继电器动作慢、寿命短,系统控制精度差,故障率高,维修难度大等。针对上述问题,此次毕业设计注塑机的控制系统采用PLC控制系统进行控制。通过编程把各种电气保护和传感信号作为输入,各动作工序作为输出。提高了系统的控制精度,可靠性好,且易于检修。 本文介绍了注塑机的机械结构和控制原理,其次分析了注塑机的基本控制要求和工艺流程,最后给出了PLC控制系统的硬件组成和软件设计方法。 关键词 注塑机;PLC;温度检测;步进控制
Abstract Now injection molding machine is a mechanical, electrical and fluid in one typical system, because of the complexity can be a molding products, less processing, and processing various types of plastics, etc., has become the plastic molding process major equipment. Traditional small and medium-sized electric injection molding machine used relays to control the most part, with the advances in electronic technology and development, its becoming more and more obvious shortcomings of the show, the main line performance for the complex, slow relay, short life expectancy, the system control poor accuracy, the high failure rate, maintenance, etc. is very difficult. In response to these problems, the graduate design of the control system of injection molding machine control system using PLC control. Through the programming to a variety of electrical protection and sensor signals as input, processes the output of the action. To improve the control of the system accuracy, reliability, and easy maintenance. This paper introduces the working principle of injection molding machine, then analyses the controlling system and technicality process, and finally given its PLC control system hardware and software design. Key words :injection molding machine;PLC;temperature test;stepping control
注塑机原理之液压系统
注塑机是机、电、液一体化、集成化和自动化程度都很高。无论是机械液压式还全液压式,液压部分都占有相当的比值,对注塑机的技术性能、节能、环保以及成本占有重要部分。 注塑机液压系统由主回路、执行回路及辅助回路系统组成,如图所示。 图14 油路系统组成图 1,2,3,4,5,6—分别为合模油缸、滑模油缸、顶出油缸、注射座油缸、注射油缸、液压马达; 7,8,9,10,11,12—分别为油缸的控制模块(CU)、指令模块(CM); 13—系统压力(P)、流量(Q)的控制和指令模块;14—泵;15—电机(M); 16—进油过滤器;17—油冷却器; 18—油箱;P—进油管路(高压);T—回油管路。(低压) 油路总管线(P、T、P)的上部分是执行回路系统,下部分是主回路系统及辅助回路系统。 执行回路系统:主要由各执行机构(油缸)和指令及控制装置(电磁阀)组成。其功能是将进入管路P的高压油按程序放到油缸的左腔或右腔中去,推动活塞杆执行动作。高压油进入的时间、顺序和位置是通过电磁换向阀来实现的,工作指令通过电信号发给电磁阀的电磁铁,控制其阀芯动作,将控制油路(P)的高压油,进入换向阀推动阀芯动作,将高压油接通到油缸中去;而各油缸中的回油经回油管路T及辅助油路系统放回油箱。 主回路系统:由动力源和控制模块组成。动力源系统(电机、油泵)产生油压(P)和流量(Q),与指令(CU)及控制(CM)模块(压力阀、流量阀等)组成回路。从泵来的高压油,进入主管路的时间、顺序、压力及流量,是通过流量阀,压力阀是电磁铁获得,指令的时间、顺序和强弱,由控制其阀芯的推力和开度来确定的。 执行回路与主回路之间是通过进油管路P(高压),回油管路T(低压)以及控制回路P(高压)形成“连接网络”。
电脑横机安全操作规程标准范本
操作规程编号:LX-FS-A76525 电脑横机安全操作规程标准范本 In The Daily Work Environment, The Operation Standards Are Restricted, And Relevant Personnel Are Required To Abide By The Corresponding Procedures And Codes Of Conduct, So That The Overall Behavior Can Reach The Specified Standards 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑
电脑横机安全操作规程标准范本 使用说明:本操作规程资料适用于日常工作环境中对既定操作标准、规范进行约束,并要求相关人员共同遵守对应的办事规程与行动准则,使整体行为或活动达到或超越规定的标准。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 1、了解设备各部件的名称与功能,员工在操作前必须束起头发,以保证操作安全:防止意外,同时,上岗时不允许衣着宽松,配项链及手镯。 2、禁止移除机台上所有的安全防护设备及装置(如前/后安全盖,探针装置,红外线装置等所有感应器)。 3、使用前首先做好设备清洁工作,清洁前必须关闭电源以防危险。将机台织针,沉降片,沙嘴,沙嘴导轨,机头外围,毛纱,纱坐,张力装置线架上的灰尘,飞毛等清理干净。 4、清洁完毕,检查针器各部件是否复位,针床
注塑机电气原理图概述
注塑机电气控制系统 第一节 概述 注塑机控制系统是一套以控制器为控制核心,包括各种电器、电子元件、仪表、加热器、传感器等组成,与液压系统配合,正确实现注塑机的压力、温度、速度、时间等各工艺过程以及调模、手动、半自动、全自动等各程序动作的系统设备。控制系统在注塑机中以独立部分而存在。 第一节 注塑机工作原理 一、注塑机工作原理 注塑成型机简称注塑机,其机械部分主要由注塑部件和合模部件组成。注塑部件主要由料筒和螺杆及注射油缸组成示意如图1-19所示。 注塑成型是用塑性 的热物理性质,把物料 从料斗加入料筒内,料筒外由加热圈加热,使物料熔融。在料筒内装有在外动力油马达作用下驱动旋转的螺杆。物料在螺杆的作用下,沿着螺槽向前输送并压实。物料在外加热和螺杆剪切的双重作用下逐渐的塑化、熔融和均化。当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用力作用下向后退,使螺杆头部形成储料空间,完成塑化过程。然后,螺杆在注射油缸活塞杆推力的作用下,以高速、高压,将储料室的熔融料通过喷嘴注射到模具的型腔中。型腔中的容料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制件从模具顶出落下。 塑料从固体料经料斗加入到料筒中,经过塑化熔融阶段,直到注射、保压、冷却、启模、顶出制品落下等过程,全是按着严格地自动化工作程序操作的,如图1-20所示。 1-模具 2-喷嘴 3-料筒 4-螺杆 5-加热圈 6-料斗 7-油马达 8-注射油缸 9-储料室 10-制件 11-顶杆 图1-19 注塑成型原理图 闭模 注射座前进 注射 保压 制品顶出 启模 冷却 注射座动
电脑横机安全操作规程示范文本
电脑横机安全操作规程示 范文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
电脑横机安全操作规程示范文本 使用指引:此操作规程资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 1、了解设备各部件的名称与功能,员工在操作前必须 束起头发,以保证操作安全:防止意外,同时,上岗时不 允许衣着宽松,配项链及手镯。 2、禁止移除机台上所有的安全防护设备及装置(如前 /后安全盖,探针装置,红外线装置等所有感应器)。 3、使用前首先做好设备清洁工作,清洁前必须关闭电 源以防危险。将机台织针,沉降片,沙嘴,沙嘴导轨,机 头外围,毛纱,纱坐,张力装置线架上的灰尘,飞毛等清 理干净。 4、清洁完毕,检查针器各部件是否复位,针床之间是 否有异物,以免导致开机后对机台造成损伤。 5、穿纱线前必须停机状态下操作,按下紧急停止开
关,以防止不小心碰到启动操作杆,开机造成安全事故。 6、开机前,必须关闭前后安全盖。操作夹子或剪刀装置时必须使用手动操作功能,手,脸,宽松衣物和其它物品要远离该装置。 7、机器开始编织前需按下F1让机头归零,接着按下F2锁定。当机头纱被主副罗拉下时,再次按下F2进行解锁,开始编织。 8、当机器运转不正常时!操作工不得离开机台。及时联系机修人员,不得继续运作,造成设备元件的损伤。 9、设备使用完毕后需再次进行清洁加油保养!关闭好前后安全门。关闭电源拔下插头。 请在此位置输入品牌名/标语/slogan Please Enter The Brand Name / Slogan / Slogan In This Position, Such As Foonsion
如何解决塑料注塑机的控制系统故障和修理
如何解决塑料注塑机的控制系统故障和修理
2013-1-5 15:44:00 来源: [关闭][打印]
注塑机是机械、电控、液压一体化的组合,电气复杂,油压管路交叉林立,控制器五 花八门,产品从 80 年代到至今,故障现象也是千奇百怪,各不相同,特别是进口注 塑机,不仅价格昂贵,每台约几万到几十万美金。进口大型注塑机内还有成千上万只 元器件, 若其中有一个元件有故障, 就会引起注塑机的不正常现象, 还有导线的连接、 有一点疏忽就会出问题, 再加上大型注塑机体积庞大, 在无恒温注塑车间条件下使用, 环境的影响很容易引发故障。 为此, 进口注塑机 “维修难” 的问题就放在我们的面前。 引进了这么多的注塑机,如何能迅速找出故障、隐患,并及时排除之?如何能维修好 这些昂贵的设备?我认为首先要有高度的责任心;第二,要努力掌握数控液压技术, 维修注塑机的实践认为要多看、多问、多记、多思、多练,逐步提高自己的技术水准 和维修能力,才能适应各种较复杂的局面,解决困难的问题,修好注塑机。 一、要多看 1. 要多看注塑机电子电路资料 要多看,要了解各种注塑机电子电路系统和 PC、PLC 可编程序控制器的特点和功能; 要了解注塑机电子电路系统的报警及排除方法;要了解 PC、PLC 注塑机参数设定的含 义;要了解 PC、PLC 的编程语言;要了解注塑机动作编程的方法;要了解注塑机控制 面板的操作和各菜单的内容,往往资料一大堆,怎么看?我认为主要要突出重点,搞 清来龙去脉,重点是吃透注塑机控制器的基本组成和结构,掌握方框图。其余的可以 “游览”和通读,但每部分内容要有重点的了解、掌握。由于注塑机控制器内部线路 图相当复杂,而制造商均不提供。因此也不必详细地搞清楚。要重点了解每部分的作 用,各板子的功能,接口的去向,LED 灯的含义等。现在注塑机控制器型号多、更新 快,不同的制造厂、不同型号往往差别很大。要了解其共性与个性。 2.要多看注塑机电气图、消化注塑机电气图 对于每一个电气元件,比如:接触器、继电器、时间继电器等以及 PC、PLC 的输入、 输出,要在电气图上一一注明。 3,要多看液压图,并深入消化之 对于注塑机的机械、液压图,要搞清楚其作用和来龙去脉。并在图纸上一一注明,如 锁模是由哪个电磁阀动作的?对应的 PC、PLC 输出、输入是哪几个?在图上写明,这 样从电气到机械动作一竿到底,同时特别对机、电关系比较密切的部分要重点了解, 现在注塑机采用电液比例技术,要重点了解其作用和功能,特别要了解其调整方法及 调整数据,静态和动态时比例阀电流及对应泵的压力,既懂电又懂机,机电一体化, 掌握多种本领,这样解决问题的本领就大了。 二、要多问 1.要多问注塑机专家 如果你能有培训的机会或者注塑机专家来你厂安装调试注塑机,你最好有机会参加。 这是一次最好的学习机会,因为能获得大量的第一手资料和注塑机调试的方法及技 巧,不懂就要搞清楚。通过这段时间,会有极大的收获,能够获得不少内部的资料和 手册(对用户是保密的)。当注塑机投入正式生产之后,也应该经常与注塑机有关专
国产电脑横机操作和维修方法精修订
国产电脑横机操作和维 修方法 标准化管理部编码-[99968T-6889628-J68568-1689N]
国产电脑横机操作和维修方法 一.操作注意事项 1.读盘,不顺畅时可以重新关电源后插拔USB插口,用华翔控制器的可以先切换一下存读介质(U盘和磁盘)然后再开机读盘。 2.穿纱,同时要调整好天线弹力,侧天线张力。 3.要按照打样要求调整好度目、拉力等。 4.确定花样展开以及纱嘴摆方位置。国花系列还有前置量。 5.挂布(起底板机器不用),行锁定(飞虎机器用重复)即时给副罗拉开合情况,机头速度要小于0。40m/s,布片到达主罗拉时解除行锁定(飞虎机器把重复点一下)。加大速度,拉力等。 二.开始编织 1.随时检查布片密度及确认粗幼纱情况,以便随时控制衣片长短。跟足样板尺寸。 2.注意毛纱过蜡情况及毛纱排放位置。拆片纱要重新试度目和拉力。 3.随时了解用纱情况,毛料色差等。 4.衫片分码,分色整齐叠好安要求捆好交货。 5.注意倒卷布和副罗拉缠纱(国花系列特别要注意) 三.常见问题的处理方法 (一)度目 1.编织时度目越来越大。A,检查线路是否接触不良。 B,检查度目马达螺丝是否松动。 2.两口同时做编织,若一口度目异常变小,可以考虑把度目原点适当调大。 (二)撞连接针脚(国花系列叫长针) 1.查看度目是否灵活。 2.查看连接针脚在针床上是否运行畅顺,用手压下去是否弹起自如。 3.查看度目马达螺丝是否松动。度目转盘是否顺畅。 4.查看度目感应器是否损坏。 5.查看压针三脚是否到位。国花系列要看电磁铁摆动情况。 6.度目太紧时不能脱圈,也会撞连接针脚。7.检查翻针三角的翻接针导块是否顺畅、灵活。8.检查度目底板,滑块是否到位、灵活。 (三)乱花(乱选针) 1.看布片乱花是否有规律,比如问题都出在那一个选针器上。 2.看是偷选,还是漏选。调整选针片和针床的间隙。 3.调整选针参数,选针原点,选针微调。 4.看选针针脚在针床上是否太紧,太松。是否顺畅。 5.线路检查,各插头是否插好,看看是否有接触不良。 6.看主驱动皮带是否太松。7.看下针尺是否会太紧或太松。8.更换选针基板。9.重新找原点,国花系列要注意铜头部位。 (四)平摇漏针 1.看是否乱花引起的。 2.看天杆安装是否规范,可能导致纱嘴高低,是否对准嘴孔中缝。 3.看织针在针床上是否不顺畅。 4.看是否上一行翻针遗留的问题。 5.看是否织针损坏。
传感器分类及常见传感器的应用
机电一体化技术常用传感器及其原理 班级:机械设计制造及其自动化姓名: 学号:
一、传感器的分类 传感器有许多分类方法,但常用的分类方法有两种,一种是按被测物理量来分;另一种是按传感器的工作原理来分。按被测物理量划分的传感器,常见的有:温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等。 按工作原理可划分为: 1.电学式传感器 电学式传感器是非电量电测技术中应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。 电阻式传感器是利用变阻器将被测非电量转换为电阻信号的原理制成。电阻式传感器一般有电位器式、触点变阻式、电阻应变片式及压阻式传感器等。电阻式传感器主要用于位移、压力、力、应变、力矩、气流流速、液位和液体流量等参数的测量。 电容式传感器是利用改变电容的几何尺寸或改变介质的性质和含量,从而使电容量发生变化的原理制成。主要用于压力、位移、液位、厚度、水分含量等参数的测量。 电感式传感器是利用改变磁路几何尺寸、磁体位置来改变电感或互感的电感量或压磁效应原理制成的。主要用于位移、压力、力、振动、加速度等参数的测量。 磁电式传感器是利用电磁感应原理,把被测非电量转换成电量制成。主要用于流量、转速和位移等参数的测量。 电涡流式传感器是利用金屑在磁场中运动切割磁力线,在金属内形成涡流的原理制成。主要用于位移及厚度等参数的测量。 2.磁学式传感器 磁学式传感器是利用铁磁物质的一些物理效应而制成的,主要用于位移、转矩等参
数的测量。
3.光电式传感器 光电式传感器在非电量电测及自动控制技术中占有重要的地位。它是利用光电器件的光电效应和光学原理制成的,主要用于光强、光通量、位移、浓度等参数的测量。 4.电势型传感器 电势型传感器是利用热电效应、光电效应、霍尔效应等原理制成,主要用于温度、磁通、电流、速度、光强、热辐射等参数的测量。 5.电荷传感器 电荷传感器是利用压电效应原理制成的,主要用于力及加速度的测量。 6.半导体传感器 半导体传感器是利用半导体的压阻效应、内光电效应、磁电效应、半导体与气体接触产生物质变化等原理制成,主要用于温度、湿度、压力、加速度、磁场和有害气体的测量。 7.谐振式传感器 谐振式传感器是利用改变电或机械的固有参数来改变谐振频率的原理制成,主要用来测量压力。 8.电化学式传感器 电化学式传感器是以离子导电为基础制成,根据其电特性的形成不同,电化学传感器可分为电位式传感器、电导式传感器、电量式传感器、极谱式传感器和电解式传感器等。电化学式传感器主要用于分析气体、液体或溶于液体的固体成分、液体的酸碱度、电导率及氧化还原电位等参数的测量。 另外,根据传感器对信号的检测转换过程,传感器可划分为直接转换型传感器和间接转换型传感器两大类。前者是把输入给传感器的非电量一次性的变换为电信号输出,如光
电脑横机调机步骤
调机步骤 一、开机:当机器正确接上电源后,按下起动开关,会听到三声“嘟”的声音,然后进入机器存自检画面,正常的话将进入主画面。 二、磁盘管理:按下磁盘作业按键时,会进入磁盘作业菜单。 1、列磁盘目录:列出磁盘上所有的文件; 2、动作文件输入到存:将CNT文件输入到存; 3、花板文件输入到存:将PAT文件输入到存; 4、存动作文件输入到磁盘:将存中的CNT文件复制到磁盘; 5、存花板文件输入到磁盘:将存中的PAT文件复制到磁盘; 6、格式化磁盘:将磁盘格式化; 7、磁盘文件删除:将磁盘中的某一个文件删除; 8、字库文件输入到存:当系统升级后,需将新的字库文件输入到存; 9、8位厂标照片输入到存:将PIC文件输入到存,可以更改屏幕显示。 三、存管理:按下C键还可以进行机器的工作参数复制。 1、存花样选择:用于选择从磁盘输入的花板文件,; 2、存程式编辑:可以查看和编辑每一页程式,当进入程式编辑画面后,可以对行号、色代号、编织指令等进入修改。机器画面也会有相应的提示。按下F2后可以进行跳行编辑,F3为返回首行,F4为最后一行,F5用于纱嘴交换(一系统和二系统交换)F6纱嘴替换,可以随意替换纱嘴。 3、存花样编辑:进入此画面后,我们可以清楚的看到花样的组织,同时可以简单的修改。功能键F1用于跳行。 4、删除花样:删除指定的花样,输入存号即可。 5、总清花样:按下此键,系统会有警示提示,如果确定将删除存所有花样,即刷新存。所有花板文件将丢失。
四、设置机器辅助功能 1、设定机器系统参数1:按下此键会有密码提示输入显示,输入密码“1618”即可进入系统参数设定菜单。 (1)针零位:设定读针的起始位置以及针距和机器总针数,(设定此项参数前,应先将同步带齿距校正)具体操作是先将机器左边对准第1枚针即可,然后按下F1就可设定针零位。 (2)左系统纱嘴右行零位:将左系统任意带上1枚纱嘴,然后用手推到第一枚针的位置(右行),按下F1即可确定。 (3)左系统纱嘴左行零位:将左系统任意带上1枚纱嘴,然后用手推到第一枚针的位置(左行),按下F1即可确定。 (4)右系统纱嘴右行零位:将右系统任意带上1枚纱嘴,然后用手推到第一枚针的位置(右行),按下F1即可确定。 (5)右系统纱嘴左行零位:将右系统任意带上1枚纱嘴,然后用手推到第一枚针的位置(左行),按下F1即可确定。 (6)机头左限位:将机头推到左边限位开关处,按下F1即可。 (7)机头右限位:将机头推到右边限位开关处,按下F1即可。 (8)横机1英寸针数:设置机器的针距,。 (9)选针器右行补偿:当机器右行有乱针现象时,请补偿此参数,每次补偿的围在0.2左右。机器高速乱针时,减小此参数,机器低速乱针时,增大此参数。 (10)选针器左行补偿:当机器左行有乱针现象时,请补偿此参数。每次补偿的围在0.2左右,机器高速乱针时,增大此参数,机器低速乱针时,减小此参数. 2、设定机器参数2 (1)纱嘴停放修正值:设定机器高速和低速时纱嘴停放的位置(1——14) (2)电磁铁高压:用于调整各种电磁铁的通电时间,一般不需要调整。
注塑机电脑电气电路分析---弘讯电脑
目录 注塑机电气电路分析---弘讯电脑 (2) 1.电源系统 (2) 2.位置尺(A/D)的测量 (2) 3.温度的测量和控制 (3) 4.比例压力,流量(D/A) (3) 5.面板控制及显示器。 (4) 6.方向阀驱动及行程输入。 (5) 7、使用U盘传程序方法 (5) 8. 弘讯电脑常见故障分析 (7) 故障一:无显示、显示不清晰 (8) 故障二:手动灯不亮,不工作 (8) 压力、流量故障 (9) 温控故障 (9) 电子尺故障 (10) 输入、输出点故障 (11) 按键故障 (11) 资料存储故障 (11) 其它故障 (12)
注塑机电气电路分析---弘讯电脑 1.电源系统 AK580-M6C电源系统由以下4个部分组成: 1、440W变压器,输入380V,输出0,110V,220V,110V供给开关电源,220V, 供交流接触器(加热,电机启动) 2、T1015小变压器,~15V,0V,~15V,(蓝,灰,蓝)供电脑测量位置尺电源。~10V, 0V,~10V(黄,白,黄)供温度测量用电源 3、开关电源A(0V,24V),供电脑自身主机,面板用电,及比例压力,流量。 4、开关电源B(HCOM,H24V),供接近开关,行程开关,及液压电磁阀用电。 故障分析: 1、440W变压器故障判定按电工标准进行检验,输入输出是否符合标牌标准。注: 小变压器T1015,15V不得低于13.5V,10V不得低于7.5V,否则,可能会造 成电子尺显示数据大范围波动,温度跳动不准。 2、若小变压器T1015无输出,则电脑显示位置检测不良,加热,电机不能启动, 温度画面每一段实际温度显示为970。 3、开关电源A,若没输出,造成显示无,主机RUN红色指示灯不闪烁,无法开机。 4、开关电源B无,基本表现为:行程开关(PB)都无输入(PB=0),(PC)方向阀, 及溢流阀不通电。 5、C6000,C7000电脑A,B电源根据实际的负载大小配置与机器锁模力,及机型 有一定关联,开关电源型号有150W,240W,350W,500W,600W。注240W,500W, 600W的输入电压110V,220V,电源本身会自动调整,电源内的风扇会根据温 度的升高自动打开冷却,若风扇坏,工作一段时间后,开关电源发热,造成停 机。 2.位置尺(A/D)的测量 1、位置尺又称位移传感器。 S V为+10V,G为0V,S为信号端,Smin=0v,Smax=10v 电子尺的内电阻一般为5K+10%,特殊也有3K,1K,10K。 2、电脑到电子尺的连接须采用屏蔽线连接,并避开强电线路,不应与动力线路穿 同一根管。防止干扰。 3、位置尺即电脑对注塑机上模板位置,顶杆位置,螺杆位置,座台位置实际监控。 主画面动态显示三把电子尺的实际位置。既实际位置的变动,主画面上的模板, 顶杆,螺杆位置会发生变化。 4、组态画面内:位置尺的长度即实际所对应使用电子尺的长度,如电子尺标称9E, 即9*25MM=225MM,由于电子尺的本身有一定误差,设定时根据实际须作适当调
国产电脑横机操作和维修方法
国产电脑横机操作和维修 方法 Revised by Hanlin on 10 January 2021
国产电脑横机操作和维修方法 一.操作注意事项 1.读盘,不顺畅时可以重新关电源后插拔USB插口,用华翔控制器的可以先切换一下存读介质(U盘和磁盘)然后再开机读盘。 2.穿纱,同时要调整好天线弹力,侧天线张力。 3.要按照打样要求调整好度目、拉力等。 4.确定花样展开以及纱嘴摆方位置。国花系列还有前置量。 5.挂布(起底板机器不用),行锁定(飞虎机器用重复)即时给副罗拉开合情况,机头速度要小于0。40m/s,布片到达主罗拉时解除行锁定(飞虎机器把重复点一下)。加大速度,拉力等。 二.开始编织 1.随时检查布片密度及确认粗幼纱情况,以便随时控制衣片长短。跟足样板尺寸。 2.注意毛纱过蜡情况及毛纱排放位置。拆片纱要重新试度目和拉力。 3.随时了解用纱情况,毛料色差等。 4.衫片分码,分色整齐叠好安要求捆好交货。 5.注意倒卷布和副罗拉缠纱(国花系列特别要注意) 三.常见问题的处理方法 (一)度目 1.编织时度目越来越大。A,检查线路是否接触不良。B,检查度目马达螺丝是否松动。 2.两口同时做编织,若一口度目异常变小,可以考虑把度目原点适当调大。 (二)撞连接针脚(国花系列叫长针) 1.查看度目是否灵活。 2.查看连接针脚在针床上是否运行畅顺,用手压下去是否弹起自如。 3.查看度目马达螺丝是否松动。度目转盘是否顺畅。 4.查看度目感应器是否损坏。 5.查看压针三脚是否到位。国花系列要看电磁铁摆动情况。 6.度目太紧时不能脱圈,也会撞连接针脚。7.检查翻针三角的翻接针导块是否顺畅、灵活。8.检查度目底板,滑块是否到位、灵活。 (三)乱花(乱选针) 1.看布片乱花是否有规律,比如问题都出在那一个选针器上。 2.看是偷选,还是漏选。调整选针片和针床的间隙。 3.调整选针参数,选针原点,选针微调。 4.看选针针脚在针床上是否太紧,太松。是否顺畅。 5.线路检查,各插头是否插好,看看是否有接触不良。 6.看主驱动皮带是否太松。 7.看下针尺是否会太紧或太松。 8.更换选针基板。9.重新找原点,国花系列要注意铜头部位。 (四)平摇漏针 1.看是否乱花引起的。 2.看天杆安装是否规范,可能导致纱嘴高低,是否对准嘴孔中缝。 3.看织针在针床上是否不顺畅。 4.看是否上一行翻针遗留的问题。 5.看是否织针损坏。
全电动注塑机控制系统
全电动注塑机控制系统 1 注塑机结构 全电动式注射机的所有运动都是使用伺服电机驱动,如图1所示为全电式注射机主要部件结构图。 图1 全电注射机主要部件结构 1-模具开合伺服电机;2-塑化伺服电机;3-射胶伺服电机;4-调模变频电机 5-顶出伺服电机;6-螺杆加热器;7-射台移动电机 1.注射装置 注射装置是实现塑料的塑化、注射,包括料斗、料筒、加热器、计量装置、螺杆及其驱动装置、喷嘴等部件。 注射装置的结构和控制方式对制品的质量起着决定性的影响,是注射机中的关键部件。 采用伺服电机驱动注射机注射装置通常有两种形式:皮带驱动方式和直接驱动方式。皮带传动精度会受影响,直接驱动方式结构简单。电动注射机注射机构,要求电动机转速较低、转动力矩大,而且超载保护作用较弱。因此,在成形大制品时,通常使用皮带式驱动,而对于小制品则常常采用直接驱动方式。 如图2所示为伺服电动机直接驱动的注射装置,伺服电机M1轴上装有带轮,通过安装在这个轮子上的齿形带驱动滚珠丝杆回转,从而使螺杆前进(注射)或
者后退(塑化),而螺杆的回转运动可以通过伺服电机M2以同样的方式实现。 注射过程中除了速度的控制之外,还要考虑注射压力的控制,在螺杆末端的止推轴承保持架上安装压力传感器,通过其反馈信号对注射压力进行精确的控制。用这种方法可以直接检测到注射或塑化时加料筒内塑料压力的反压力,因此可以对注射压力、保压压力进行精确的控制,而塑化压力则采用连续不断的对伺服电机施加一定负载的方式进行控制。 图2 注射压力控制原理 2.合模装置 实现模具的开闭动作,成形时提供足够的夹紧力使模具锁紧,开模时推出模内制品。 电动注射机的合模机构主要采用肘杆式锁模机构,模板开合动作采用伺服电机的优点是:模板开合速度易于控制,动模板的停止位置也可以精确控制等,这就需要价格较贵的大型伺服电机。 全电合模装置包括:模具开闭电机代替了传统的移模油缸,调模电机替代了传统的调模油缸,顶出电机则替代了传统的顶出油缸。 2 注塑机控制系统 2.1 控制系统软件、硬件结构 电动注射机的控制是根据工艺过程设计的,具体内容包括以下两个方面。
电脑横机调机步骤精编WORD版
电脑横机调机步骤精编 W O R D版 IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】
调机步骤 一、开机:当机器正确接上电源后,按下起动开关,会听到三声“嘟”的声音,然后进入机器内存自检画面,正常的话将进入主画面。 二、磁盘管理:按下磁盘作业按键时,会进入磁盘作业菜单。 1、列磁盘目录:列出磁盘上所有的文件; 2、动作文件输入到内存:将CNT文件输入到内存; 3、花板文件输入到内存:将PAT文件输入到内存; 4、内存动作文件输入到磁盘:将内存中的CNT文件复制到磁盘; 5、内存花板文件输入到磁盘:将内存中的PAT文件复制到磁盘; 6、格式化磁盘:将磁盘格式化; 7、磁盘文件删除:将磁盘中的某一个文件删除; 8、字库文件输入到内存:当系统升级后,需将新的字库文件输入到内存; 9、8位厂标照片输入到内存:将PIC文件输入到内存,可以更改屏幕显示。 三、内存管理:按下C键还可以进行机器的工作参数复制。 1、内存花样选择:用于选择从磁盘输入的花板文件,; 2、内存程式编辑:可以查看和编辑每一页程式,当进入程式编辑画面后,可以对行号、色代号、编织指令等进入修改。机器画面也会有相应的提示。按下F2后可以进行跳行编
辑,F3为返回首行,F4为最后一行,F5用于纱嘴交换(一系统和二系统交换)F6纱嘴替换,可以随意替换纱嘴。 3、内存花样编辑:进入此画面后,我们可以清楚的看到花样的组织,同时可以简单的修改。功能键F1用于跳行。 4、删除花样:删除指定的花样,输入内存号即可。 5、总清花样:按下此键,系统会有警示提示,如果确定将删除内存所有花样,即刷新内存。所有花板文件将丢失。 四、设置机器辅助功能 1、设定机器系统参数1:按下此键会有密码提示输入显示,输入密码“1618”即可进入系统参数设定菜单。 (1)针零位:设定读针的起始位置以及针距和机器总针数,(设定此项参数前,应先将同步带齿距校正)具体操作是先将机器左边对准第1枚针即可,然后按下F1就可设定针零位。 (2)左系统纱嘴右行零位:将左系统任意带上1枚纱嘴,然后用手推到第一枚针的位置(右行),按下F1即可确定。 (3)左系统纱嘴左行零位:将左系统任意带上1枚纱嘴,然后用手推到第一枚针的位置(左行),按下F1即可确定。 (4)右系统纱嘴右行零位:将右系统任意带上1枚纱嘴,然后用手推到第一枚针的位置(右行),按下F1即可确定。
电脑横机安全操作作业指导书
电脑横机安全操作作业指导书 目的: 通过规范作业程序,使加工工件符合质量要求,避免因不规范操作而造成意外。 适用范围: 公司所有电脑横机设备操作 操作步骤 1、了解设备各部件的名称与功能,员工在操作前必须束起头发,以保证操作安全:防止意外,同时,上岗时不允许衣着宽松,配项链及手镯。 2、禁止移除机台上所有的安全防护设备及装置(如前/后安全盖,探针装置,红外线装置等所有感应器)。 3、使用前首先做好设备清洁工作,清洁前必须关闭电源以防危险。将机台织针,沉降片,沙嘴,沙嘴导轨,机头外围,毛纱,纱坐,张力装置线架上的灰尘,飞毛等清理干净。 4、清洁完毕,检查针器各部件是否复位,针床之间是否有异物,以免导致开机后对机台造成损伤。 5、穿纱线前必须停机状态下操作,按下紧急停止开关,以防止不小心碰到启动操作杆,开机造成安全事故。 6、开机前,必须关闭前后安全盖。操作夹子或剪刀装置时必须使用手动操作功能,手,脸,宽松衣物和其它物品要远离该装置。 7、机器开始编织前需按下F1让机头归零,接着按下F2锁定。当机头纱被主副罗拉下时,再次按下F2进行解锁,开始编织。 8、当机器运转不正常时!操作工不得离开机台。及时联系机修人员,不得继续运作,造成设备元件的损伤。 9、设备使用完毕后需再次进行清洁保养!关闭好前后安全门。关闭电源拔下插头 其它: 当操作过程中发现缝衣针有断裂,需立即停机,将断针取出后统一回收,断针回收按照《金属、利器管理程序》进行执行。 编制:审核:批准:
套口机安全操作作业指导书 目的: 通过规范作业程序,使加工工件符合质量要求,避免因不规范操作而造成意外。 适用范围: 公司所有套口机设备操作 操作步骤: 1、上班前由主管师傅负责开电源总制,检查机器的油标及机器周围是否正常。 2、开机十分钟内不准乱关电源,防止电流冲击而烧毁电机,机器运转过程中如发现有异常响声应及时通知机修工进行处理。 3、工作时应将衫片均匀放入,防止撞针或跳针而断针。 4、生产过程中要对准记号,不要套错横行,离边,对花位不符。 5、注意领贴口要平均,防止骨位起蛇,缝线太松或太紧。 6、注意缝合机的大针错位引起"锄外眼",大针升高或弯曲引起"锄高, 坼线后漏眼"。 7、生产时注意衣片太厚或太结引起"穿错线,起耳仔,跳线,单纱"。 8、要经常清洁机位的污迹,让机器运转更加顺畅。 其它: 当操作过程中发现缝衣针有断裂,需立即停机,将断针取出后统一回收,断针回收按照《金属、利器管理程序》进行执行。 编制:审核:批准:
基于PLC实现注塑机的电气控制
基于PLC实现注塑机的电气控制 【摘要】注塑机又名注射成型机或注射机,它是将热塑性塑料或热固性料利用塑料成型模具制成各种形状的塑料制品的主要成型设备。本文旨在使用S7-200 PLC实现控制系统的电气控制,与传统的继电器控制相比,该控制方法具有可靠性高、快速、抗干扰强等优点,从而实现了注塑机生产的自动化。 【关键词】注塑机;S7-200 PLC;电气控制;自动化 1.引言 近年来汽车、建筑、家用电器、食品、医药等行业对注塑制品日益增长的需要,更推动了注射成型技术水平的发展和提高。从而线路复杂,继电器动作慢、寿命短,系统控制精度差,故障率高的传统采用继电器控制的注塑机被采用PLC 控制的系统代替。PLC控制系统可以很好的实现注塑机的各个动作,提高了系统的控制精度和自动化。 2.注塑机液压系统的工作原理及要求 注塑机是将粒状塑料通过料斗进入螺旋推进器中,螺杆转动,将物料向前推进,因螺杆外装有电加热器,将物料熔化成黏液,在此之前,合模机构已将模具闭合,当物料在螺旋推进器前端形成一定压力时,注塑机构开始将黏液高压快速注射到模具型腔中,经过一定时间的保压冷却后开模,把成型的塑料制品顶出,便完成了一个动作循环。 对液压系统要求为:合模运动要平稳,两片模具闭合时无冲击;模具闭合后,合模机构应维持闭合压力,以防止注射时将模具冲开。注射后,注射机构应保持注射压力,使塑料充满型腔;预塑进料时,螺杆转动,物料被推至螺杆前端,螺杆与注射机构一起向后退,为使螺杆前端的塑料有一定密度,注射机构必须有一定的后退阻力;系统应设有安全联锁装置以保证安全。 3.注塑机的液压系统动作控制过程 注塑机的一个工作过程要完成快速合模、慢速合模、增压锁模、注射座前进、注射、注射保压、减压放气、再增压、预塑进料、注射座后退、快速开模、慢速开模和系统卸荷。液压原如理图1。 图1中各执行元件的动作循环主要依靠行程开关、时间继电器和压力继电器切换电磁换向阀来实现,各电磁铁动作顺序如表1。 4.传统电气控制与PLC控制 传统电气控制系统主要是通过继电器来控制电磁铁的得电和失电,控制液压
基于三菱PLC塑料注射成型机电气控制系统的设计【开题报告】
开题报告 电气工程及其自动化 基于三菱PLC塑料注射成型机电气控制系统的设计 一、课题研究意义及现状 塑料是一门新兴的、综合性的工业,近十年工程塑料生产每年以8%以上的速度递增,而80%的工程塑料制品都是采用注塑成型,由此可见,注塑成型在塑料工业中有其特殊的地位。目前,注塑机的控制系统正朝着高精度、高灵敏度、节能、比例和微机程序化方向发展。各种最新的电气元件、液压元件都在注塑机控制系统中得到及时的应用,形成了机、电、液一体化产品。 注射成型机简称注射机或注塑机,具有能一次成型外型复杂、尺寸精确或带有金属嵌件的质地密致的塑料制品。能在对各种塑料进行加热、融熔、搅拌、增压后,将塑料流体注入模具的模腔内,经冷却固化后,最后完成工件的一次注塑成型。注射成型机具有耐冲击性、耐磨性、绝缘等特点,工艺先进,流程简捷,是现代加工塑料制品极具生命力的最新技术。 注塑机是注塑成型的主要设备,注塑机的技术参和性能与塑料性质和注塑成型工艺有着密切的关系。在塑料工业迅速发展的今天,注塑机不论在数量上或品种上都占有重要地位,其生产总数占整个塑料成品设备的20%--30%,从而成为目前塑料机械中增长最快,生产数量最多的机种之一,被广泛应用于国防、机电、汽车、交通运输、建材、包装、农业、文教卫生及人们日常生活各个领域。 塑料注射成型机作为塑料制品加工设备已有半个多世纪的历史,近年来随着塑料制品应用领域的不断扩大,世界上对注塑机械的需求呈现了持续大幅攀升的趋势。众所周知,最早的注塑机结构就是全电动式。只不过当时采用的是一般电动机,结构复杂、耗能高。现在的这种用伺服电机驱动的全电动式注塑机最早出现20世纪80年代初,它在肘杆式注塑机的结构上用伺服电机取代了所有油缸,由日本少数厂家率先推向市场。虽然它有一系列优点,但由于技术不成熟和价格昂贵等原因未能在市场上拓展。 目前,随着新型合成材料的涌现和要求使用高精度注塑范围的扩大,以及绿色环保的意识的日渐增强,人们对注塑机的要求越来越高,各类紧密型、节能型、环保型等注塑机不断涌现,产业结构正在迅速转变。在这些种类繁多的注塑机中,最具代表性的有以下几种:液压式注塑机和电动式注塑机。我国的注塑机品种单一,以通用机为主,技术创新不够,不能适应市场的需求.随着塑料制品加工业的进一步成熟,对塑料机械产业也提出了越来越高的要求。为实现高效、精确、节能的目标,我国的注塑机技术正向着大型化,智能化,超高速化的方向发展。 二、课题研究的主要内容和预期目标