控制系统阶跃响应与脉冲响应实验

电子信息工程学系实验报告
课程名称:MATLAB
实验项目名称:控制系统阶跃响应与脉冲响应实验 实验时间:
实 验 目 的:
(1)观察学习控制系统的单位阶跃响应和单位脉冲响应 (2)记录单位阶跃响应和单位脉冲响应曲线 (3)掌握时间响应分析的一般方法 实 验 环 境:
Matlab7.1软件
实 验 内 容 及 过 程: 1、实验内容: 已知二阶系统:10
210)(2
++=
s s s G
(1)建立系统模型,观察阶跃响应曲线和单位脉冲响应,并计算系统的闭环根、阻尼比,无阻尼振荡频率,并作记录。
(2)修改参数,分别实验ξ=1,ξ=2的响应曲线,并作记录。
2、实验步骤:
(1)运行MATLAB ; (2)建立系统模型
1)传递函数模型TF 2)ZPK 模型
3)MATLAB 的阶跃响应函数
3、 实验要求:
(1)分析系统的阻尼比和无阻尼振荡频率对系统阶跃响应和脉冲响应的影响; (2)分析响应曲线的零初值、非零初值与系统模型的关系; (3)分析响应曲线的稳态值与系统模型的关系;
(4)分析系统零点对阶跃响应曲线和单位脉冲响应曲线的影响;
实验结果及分析:
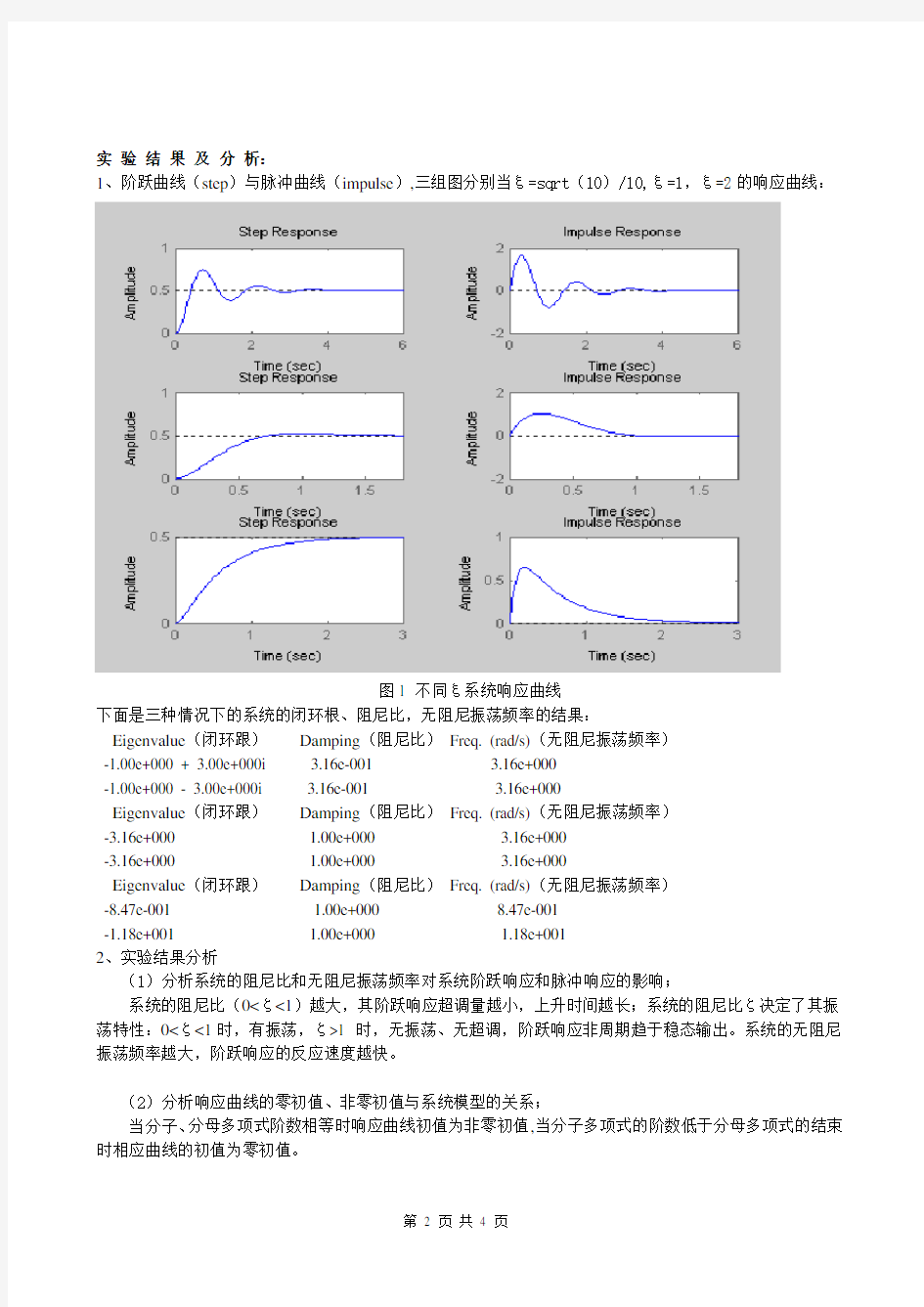
1、阶跃曲线(step)与脉冲曲线(impulse),三组图分别当ξ=sqrt(10)/10,ξ=1,ξ=2的响应曲线:
图1 不同ξ系统响应曲线
下面是三种情况下的系统的闭环根、阻尼比,无阻尼振荡频率的结果:
Eigenvalue(闭环跟)Damping(阻尼比)Freq. (rad/s)(无阻尼振荡频率)
-1.00e+000 + 3.00e+000i 3.16e-001 3.16e+000
-1.00e+000 - 3.00e+000i 3.16e-001 3.16e+000
Eigenvalue(闭环跟)Damping(阻尼比)Freq. (rad/s)(无阻尼振荡频率)
-3.16e+000 1.00e+000 3.16e+000
-3.16e+000 1.00e+000 3.16e+000
Eigenvalue(闭环跟)Damping(阻尼比)Freq. (rad/s)(无阻尼振荡频率)
-8.47e-001 1.00e+000 8.47e-001
-1.18e+001 1.00e+000 1.18e+001
2、实验结果分析
(1)分析系统的阻尼比和无阻尼振荡频率对系统阶跃响应和脉冲响应的影响;
系统的阻尼比(0<ζ<1)越大,其阶跃响应超调量越小,上升时间越长;系统的阻尼比ζ决定了其振荡特性:0<ζ<1时,有振荡,ζ>1 时,无振荡、无超调,阶跃响应非周期趋于稳态输出。系统的无阻尼振荡频率越大,阶跃响应的反应速度越快。
(2)分析响应曲线的零初值、非零初值与系统模型的关系;
当分子、分母多项式阶数相等时响应曲线初值为非零初值,当分子多项式的阶数低于分母多项式的结束时相应曲线的初值为零初值。
图2响应曲线的零、非零初值与系统模型的关系图;
(3)分析响应曲线的稳态值与系统模型的关系;
当分子、分母多项式阶数相等时响应曲线稳态值为0;当分子多项式的阶数低于分母多项式的结束时相应曲线的稳态值为1.
(4)分析系统零点对阶跃响应曲线和单位脉冲响应曲线的影响;
当系统存在不稳定零点(即右半平面零点)时,系统的阶跃响应可能有向下的峰值。如图所示
图3 系统零点对阶跃响应曲线和单位脉冲响应曲线影响图
实验心得:
通过实验观察学习控制系统的单位阶跃响应和单位脉冲响应,记录单位阶跃响应和单位脉冲响应曲线,掌握时间响应分析的一般方法。进一步掌握了自动控制原理二阶系统的时域分析,分析掌握系统的阻尼比和无阻尼振荡频率对系统阶跃响应和脉冲响应的影响,响应曲线的零初值、非零初值与系统模型的关系,响应曲线的稳态值与系统模型的关系,系统零点对阶跃响应曲线和单位脉冲响应曲线的影响,为以后自动化控制系统理论知识奠定基础。
附录:
实验程序代码:
num1=10
den1=[1 2 10]
sys1=tf(num1,den1)
h1=feedback(sys1,1) damp(den1)
num2=10
den2=[1 2*sqrt(10) 10] sys2=tf(num2,den2)
h2=feedback(sys2,1) damp(den2)
num3=10 den3=[1 4*sqrt(10) 10] sys3=tf(num3,den3)
h3=feedback(sys3,1) damp(den3)
subplot(3,2,1),step(h1) subplot(3,2,2),impulse(h1) subplot(3,2,3),step(h2) subplot(3,2,4),impulse(h2) subplot(3,2,5),step(h3) subplot(3,2,6),impulse(h3)
零初值、非零初值与系统模型的关系程序num1=10
den1=[1 2 10]
sys1=tf(num1,den1)
num2=[1 0.5 10]
den2=[1 2 10]
sys2=tf(num2,den2)
subplot(2,2,1),step(sys1)
subplot(2,2,2), impulse(sys1)
subplot(2,2,3),step(sys2)
subplot(2,2,4),impulse(sys2)
零点对阶跃响应影响程序:
num1=10
den1=[1 2 10]
sys1=tf(num1,den1)
num2=[-10]
den2=[1 2*sqrt(10) 10]
sys2=tf(num2,den2)
subplot(3,2,1),step(sys1)
subplot(3,2,2),impulse(sys1)
subplot(3,2,3),step(sys2)
subplot(3,2,4),impulse(sys2)
控制系统时间响应分析”实验报告
控制系统时间响应分析”实验报告
实验一、“控制系统时间响应分析”实验报告 一、实验类型 验证性实验 二、实验目的 1、 求系统在时间常数τ不同取值时的单位脉冲、单位阶跃响应和任意输入响应,熟悉系统时间响应的定义和图形曲线 2、 求系统的上升时间、峰值时间、最大超调量和调整时间等性能指标,熟悉系统瞬态性能指标的定义。 三、实验仪器与设备(或工具软件) 计算机,MATLAB 软件 四、实验内容、实验方法与步骤 已知系统传递函数 50 )1(05.050)(2+++=s s s G τ 1、求系统在时间常数τ不同取值时的单位脉冲、单位阶跃响应和任意输入 响应。 应用impulse 函数,可以得到τ=0,τ=0.0125、τ=0.025时系统单位脉冲响 应;应用step 函数,同样可以得到τ=0,τ=0.0125、τ=0.025时系统单位阶跃响应。 2、求系统的瞬态性能指标 五、实验结果 1、系统在时间常数τ不同取值时的单位脉冲、单位阶跃响应和任意输入响 t=[0:0.01:0.8];%仿真时间区段 nG=[50]; tao=0; dG=[0.05 1+50*tao 50]; G1=tf(nG,dG); tao=0.0125; dG=[0.05 1+50*tao 50]; G2=tf(nG,dG); tao=0.025; dG=[0.05 1+50*tao 50]; G3=tf(nG,dG);%三种τ值下,系统的传递函数模型 [y1,T]=impulse(G1,t);[y1a,T]=step(G1,t); [y2,T]=impulse(G2,t);[y2a,T]=step(G2,t);
实验3 典型闭环系统的阶跃响应的仿真
实验3 典型闭环系统的阶跃响应的仿真 一、实验目的 1. 了解MATLAB 在仿真中的具体应用 2. 熟悉MATLAB 语言环境 3. 掌握M 文件的应用 二、实验步骤 1. 对控制系统的典型结构形式二次模型化,经一定方式把数学模型转化为便于在计算 机上运行的表达形式。 2. 讨论采用数值积分法求解系统响应的仿真程序实现,绘制仿真框图。 x 0t f t j k 1 1,++k k y x f t t =图3-1 典型闭环系统的仿真程序框图
3.编写MATLAB程序语句,实现对典型闭环系统的阶跃响应的仿真 Filename:sa.m 1)输入数据 a=[a0,a1,…,an]; %% n+1维分母系数向量 b=[b0,b1,…,bm]; %% m+1维分子系数向量 X0=[x0,x1,…,xn]; %% 状态向量初值 V=V0; %% 反馈系数 n=n0; %% 系统阶次 T0=t0; %% 起始时间 Tf=tf; %% 终止时间 h=h0; %% 计算步长 R=r; %% 阶跃输入函数的幅值 2)形成开、闭环系数阵 b=b/a(1); a=a/a(1); A=a(2:n+1); %% 首一化处理 A=[rot90(rot90(eye(n-1,n)));-fliplr(A)]; %%形成能控标准型A阵 B=[zeros(1,n-1),1]'; %%形成输入阵B m1=length(b); %%分子向量维数M+1 C=[fliplr(b),zeros(1,n-m1)]; %%形成输出阵C Ab=A-B*C*V; %%形成闭环系数阵 X=X0'; y=0; t=T0; %%设初值,准备开始递推运算 3)运算求解 N=round(Tf-T0)/h; %%确定输出点数 for i=1:N %%四阶龙格-库塔法 K1=Ab*X+B*R; K2=Ab*(X+h*K1/2)+B*R; K3=Ab*(X+h*K2/2)+B*R; K4=Ab*(X+h*K3)+B*R; %%求各次斜率K X=X+h*(K1+2*K2+2*K3+K4)/6; %%求状态 y=[y,C*X]; %%求输出并以向量形式保存 t=[t,t(i)+h]; end
二阶系统的阶跃响应及频率特性
实验二二阶系统的阶跃响应及频率特性 实验简介:通过本实验学生能够学习二阶系统的频率响应和幅频特性的测试方法,对实验装置和仪器的调试操作,具备对实验数据、结果的 处理及其与理论计算分析比较的能力。 适用课程:控制工程基础 实验目的:A 学习运算放大器在控制工程中的应用及传递函数的求取。 B 学习二阶系统阶跃响应曲线的实验测试方法。 C 研究二阶系统的两个重要参数ζ、ω n 对阶跃瞬态响应 指标的影响。 D 学习频率特性的实验测试方法。 E 掌握根据频率响应实验结果绘制Bode图的方法。 F 根据实验结果所绘制的Bode图,分析二阶系统的主要 动态特性(M P ,t s )。 面向专业:机械类 实验性质:综合性/必做 知 识 点:A《模拟电子技术》课程中运算放大器的相关知识; B《数字电子技术》课程中采样及采样定理的相关知识; C《机械工程控制基础》课程中,传递函数,时域响应, 频率响应三章的内容。 学 时 数:2 设备仪器:XMN-2自动控制原理学习机,CAE-98型微机接口卡,计算机辅助实验系统2.0软件,万用表。 材料消耗:运算放大器,电阻,电容,插接线。 要 求:实验前认真预习实验指导书的实验内容,完成下述项目, 做实验时交于指导教师检查并与实验报告一起记入实验成绩。 B推导图2所示积分放大器的输出输入时域关系和传递函数。
C 推导图3所示加法和积分放大器的输出输入时域关系(两输入单输出) 和S <1>.写出op1,op2,op9,0p6对应的微分方程组(4个方程)。 <2>.画出系统方框图。 <3>.用方框图化简或方程组联立消元的方法求取实验电路所示系统的 传递函数,写出求解过程。 和ζ。 <4>.求取该系统的ω n 实验地点:教一楼327室 实验照片:实验装置及仪器
实验二 控制系统的阶跃响应及稳定性分析
实验二 控制系统的阶跃响应及稳定性分析 一、实验目的及要求: 1.掌握控制系统数学模型的基本描述方法; 2.了解控制系统的稳定性分析方法; 3.掌握控制时域分析基本方法。 二、实验内容: 1.系统数学模型的几种表示方法 (1)传递函数模型 G(s)=tf() (2)零极点模型 G(s)=zpk(z,p,k) 其中,G(s)= 将零点、极点及K值输入即可建立零极点模型。 z=[-z1,-z …,-z m] p=[-p1,-p …,-p] k=k (3)多项式求根的函数:roots ( ) 调用格式: z=roots(a) 其中:z — 各个根所构成的向量 a — 多项式系数向量 (4)两种模型之间的转换函数: [z ,p ,k]=tf2zp(num , den) %传递函数模型向零极点传递函数的转换 [num , den ]=zp2tf(z ,p ,k) %零极点传递函数向传递函数模型的转换 (5)feedback()函数:系统反馈连接
调用格式:sys=feedback(s1,s2,sign) 其中,s1为前向通道传递函数,s2为反馈通道传递函数,sign=-1时,表示系统为单位负反馈;sign=1时,表示系统为单位正反馈。 2.控制系统的稳定性分析方法 (1)求闭环特征方程的根(用roots函数); 判断以为系统前向通道传递函数而构成的单位负反馈系统的稳定性,指出系统的闭环特征根的值: 可编程如下: numg=1; deng=[1 1 2 23]; numf=1; denf=1; [num,den]= feedback(numg,deng,numf,denf,-1); roots(den) (2)化为零极点模型,看极点是否在s右半平面(用pzmap); 3.控制系统根轨迹绘制 rlocus() 函数:功能为求系统根轨迹 rlocfind():计算给定根的根轨迹增益 sgrid()函数:绘制连续时间系统根轨迹和零极点图中的阻尼系数和自然频率栅格线 4.线性系统时间响应分析 step( )函数---求系统阶跃响应 impulse( )函数:求取系统的脉冲响应 lsim( )函数:求系统的任意输入下的仿真 三、实验报告要求:
控制系统时间响应分析”实验报告
实验一、“控制系统时间响应分析”实验报告 一、实验类型 验证性实验 二、实验目的 1、 求系统在时间常数τ不同取值时的单位脉冲、单位阶跃响应和任意输入响应,熟悉系统时间响应的定义和图形曲线 2、 求系统的上升时间、峰值时间、最大超调量和调整时间等性能指标,熟悉系统瞬态性能指标的定义。 三、实验仪器与设备(或工具软件) 计算机,MATLAB 软件 四、实验内容、实验方法与步骤 已知系统传递函数 50 )1(05.050)(2+++=s s s G τ 1、求系统在时间常数τ不同取值时的单位脉冲、单位阶跃响应和任意输入响应。 应用impulse 函数,可以得到τ=0,τ=0.0125、τ=0.025时系统单位脉冲响应;应用step 函数,同样可以得到τ=0,τ=0.0125、τ=0.025时系统单位阶跃响应。 2、求系统的瞬态性能指标 五、实验结果 1、系统在时间常数τ不同取值时的单位脉冲、单位阶跃响应和任意输入响 t=[0:0.01:0.8];%仿真时间区段 nG=[50]; tao=0; dG=[0.05 1+50*tao 50]; G1=tf(nG ,dG); tao=0.0125; dG=[0.05 1+50*tao 50]; G2=tf(nG ,dG); tao=0.025; dG=[0.05 1+50*tao 50]; G3=tf(nG,dG);%三种τ值下,系统的传递函数模型 [y1,T]=impulse(G1,t);[y1a,T]=step(G1,t); [y2,T]=impulse(G2,t);[y2a,T]=step(G2,t); [y3,T]=impulse(G3,t);[y3a,T]=step(G3,t);%系统响应 subplot(131),plot(T,y1,'--',T,y2,'-.',T,y3,'-') legend('tao=0','tao=0.0125','tao=0.025') xlabel('t(sec)'),ylabel('x(t)');grid on; subplot(132),plot(T,y1a,'--',T,y2a,'-.',T,y3a,'-') legend('tao=0','tao=0.0125','tao=0.025') grid on;xlabel('t(sec)'),ylabel('x(t)');%产生图形 t=[0:0.01:1];u=sin(2*pi*t);% 仿真时间区段和输入 Tao=0.025;
过程控制系统仿真实验指导
过程控制系统Matlab/Simulink 仿真实验 实验一 过程控制系统建模 ............................................................................................................. 1 实验二 PID 控制 ............................................................................................................................. 2 实验三 串级控制 ............................................................................................................................. 6 实验四 比值控制 ........................................................................................................................... 13 实验五 解耦控制系统 . (19) 实验一 过程控制系统建模 指导内容:(略) 作业题目一: 常见的工业过程动态特性的类型有哪几种?通常的模型都有哪些?在Simulink 中建立相应模型,并求单位阶跃响应曲线。 作业题目二: 某二阶系统的模型为2 () 22 2n G s s s n n ?ζ??= ++,二阶系统的性能主要取决于ζ,n ?两个参数。试利用Simulink 仿真两个参数的变化对二阶系统输出响应的影响,加深对二阶 系统的理解,分别进行下列仿真: (1)2n ?=不变时,ζ分别为0.1, 0.8, 1.0, 2.0时的单位阶跃响应曲线; (2)0.8ζ=不变时,n ?分别为2, 5, 8, 10时的单位阶跃响应曲线。
二阶系统阶跃响应实验报告
实验一 二阶系统阶跃响应 一、实验目的 (1)研究二阶系统的两个重要参数:阻尼比ξ和无阻尼自振角频率ωn 对系统动 态性能的影响。 (2)学会根据模拟电路,确定系统传递函数。 二、实验内容 二阶系统模拟电路图如图2-1 所示。 系统特征方程为T 2s 2+KTs+1=0,其中T=RC ,K=R0/R1。根据二阶系统的标准 形式可知,ξ=K/2,通过调整K 可使ξ获得期望值。 三、预习要求 (1) 分别计算出T=0.5,ξ= 0.25,0.5,0.75 时,系统阶跃响应的超调量σP 和过渡过 程时间tS 。 ) 1( p 2 e ζζπσ--=, ζ T 3t s ≈
代入公式得: T=0.5,ξ= 0.25,σp=44.43% ,t s=6s; T=0.5,ξ= 0.5,σp=16.3% ,t s=3s; T=0.5,ξ= 0.75,σp=2.84% ,t s=2s; (2)分别计算出ξ= 0.25,T=0.2,0.5,1.0 时,系统阶跃响应的超调量σP 和过渡过程时间tS。 ξ= 0.25,T=0.2,σp=44.43% ,t s=2.4s; ξ= 0.25,T=0.5,σp=44.43% ,t s=6s; ξ= 0.25,T=1.0,σp=44.43% ,t s=12s; 四、实验步骤 (1)通过改变K,使ξ获得0,0.25,0.5,0.75,1.0 等值,在输入端加同样幅值的阶跃信号,观察过渡过程曲线,记下超调量σP 和过渡过程时间tS,将实验值和理论值进行比较。 (2)当ξ=0.25 时,令T=0.2 秒,0.5 秒,1.0 秒(T=RC,改变两个C),分别测出超调量σP 和过渡过程tS,比较三条阶跃响应曲线的异同。 五、实验数据记录与处理: 阶跃响应曲线图见后面附图。 原始数据记录: (1)T=0.5,通过改变R0的大小改变K值
自动控制原理实验一控制系统的阶跃响应.
实验一 控制系统的阶跃响应 一、实验目的 1. 掌握控制系统多项式模型和零极点模型的建立方法及它们之间的相互转换。 2.观察学习控制系统的单位阶跃响应。 3.记录单位阶跃响应曲线。 4.掌握时间响应分析的一般方法。 5.分析系统阶跃响应曲线与传递函数参数的对应关系。 二、实验设备 PC 机,MATLAB 仿真软件。 三、实验内容 1.作以下二阶系统的单位阶跃响应曲线 10 210)(2++=s s s G 2.分别改变该系统的ζ和n ω,观察阶跃响应曲线的变化。 3.作该系统的脉冲响应曲线。 四、实验原理 1. 建立系统模型 在MATLAB 下,系统数学模型有三种描述方式,在本实验中只用到多项式模型和零极点模型。 (1)多项式模型 num 表示分子多项式的系数,den 表示分母多项式的系数,以行向量的方式 输入。例如,程序为 num=[0 1 3]; %分子多项式系数 den=[1 2 2 1]; %分母多项式系数 printsys (num, den) %构造传递函数并显示 (2)零极点模型 z 表示零点,p 表示极点,以行向量的方式输入,k 表示增益。例如,程序为 k=2; %赋增益值,标量 z=[1]; %赋零点值,向量 p=[-1 2 -3]; %赋极点值,向量 [num, den]=zp2tf(z, p, k); %零极点模型转换成多项式模型 printsys(num, den) %构造传递函数并显示 (3)相关MATLAB 函数 函数tf(num, den) 用来建立控制系统的多项式模型; 函数zpk(z, p, k)用来建立控制系统的零极点模型; [num, den]=zp2tf (z, p, k) %零极点模型转换成多项式模型 [z, p, k]=tf2zp (num, den) %多项式模型转换成零极点模型 [num, den]=ord2(ωn , ξ) %用来建立二阶系统标准模型
控制系统的校正研究——频率响应法
论文题目:控制系统的校正研究——频率响应法 专业: 电子信息工程专业 姓名:签名:________ 指导老师:签名: ________ 摘要 摘要:近年来,自动控制系统在如今的工业和生活中,起着越来越重要的作用。所以,据用户要求的性能指标进行自动控制系统的串联校正设计有很重要的现实意义。对于给定的线性定常系统,通常通过加入串联超前、滞后或超前滞后综合校正装置,以达到提高系统的精度和稳定性的目的。该文分别给出基于频率特性法串联校正的具体设计方法,应用MATLAB对系统进行通用程序设计,并对实例进行仿真。仿真实例结果表明了此设计方法的有效性和实用性。 【关键词】:自动控制系统;频率响应法;MATLAB;伯德图 【论文类型】:理论研究型
Title:Correction of control system——Frequency response method Major: Electronic & Information Engineering Name:Signature: Supervisor:Signature: In recent years, automatic control systems play an increasingly important role in today's industrial and domestic.Therefore, the performance according to user requirements for the automatic control system series correcting design has a very important practical significance. For a given linear time-invariant systems, usually by joining the series ahead of lag or lead and lag correction device, in order to achieve the purpose to improve the accuracy and stability of the system. This paper gives specific design series based on the frequency characteristics correction, MATLAB system for generic programming, and simulation instance. The simulation results show the effectiveness and practicality of this design method. 【key word】:Automatic control system;Frequency response method,MATLAB;Bode diagram 【Type of Thesis】:Theory research
基于MATLAB的控制系统单位阶跃响应分析
电子科技大学学院学生实验报告 学院:机电工程学院专业:17自动化课程名称:自动控制原理实验与仿真
JET 性能指标 Pole Dampi ng (rad/sec on ds) Freque ncy (sec on ds) Time Con sta nt 1.50e+00 + 9.89e+00i 1.50e-01 1.00e+01 6.67e-01 ?1.50e+00 - 9.89e+00i 1.50e-01 1.00e+01 6.67e-01 2当=0, 0.25 , 0.5 , 0.75 , 1 , 1.25时,对应系统的闭环极点和自然振荡频率n见表,编程求取对应系统的阶跃响应曲线, 并分析n—定时,变化对系统性能的影响。。 曲线:
.w 结论:可见当n/(rad/s) —定时,系统随着阻尼比E增大,闭环极点的实部在S左半平面的位置更加远离原点,虚部减小到0,超调量减小,调节时间缩短,稳定性更好。 3. 0.25, n 10,30,50时,对应点的单位阶跃响应曲线并分析不变,n对系统性能的影响 曲线: 结论:可见当E—定时,随着n/(rad/s)增大,系统响应加速,振荡频率增大,系统调整时间缩短,但是超
调量没有变化。 3.试做出以下系统的单位阶跃响应'并与原系统G(s)= s2—2s—I。的阶跃响应曲线比较,做出实验结果分析? 1)系统分别增加零点z -5z -2, G(s) 22(S 5)G(s) 25(S 2) s2 2s 10 s2 2s 10 代码及曲线: 代码: sys=tf(10,[1 2 10]); step(sys) hold on sysc=tf([2,10],[1 2 10]); step(sysc) hold on sysx=tf([5,10],[1 2 10]); step(sysx) hold off title('单位阶跃系统增加零点比较’); lab仁'增加零点-2';text(1,1.8,lab1) Iab2='增加零点-5';text(0.25,1.1,lab2) lab3='原系统:text(1.5,1.3,lab3) 曲线:
典型环节及其阶跃响应
典型环节及其阶跃响应 一、实验目的 1. 掌握控制系统模拟实验的基本原理和一般方法。 2. 掌握控制系统时域性能指标的测量方法。 3. 加深典型环节的概念在系统建模、分析、研究中作用的认识。 4. 加深对模拟电路——传递函数——响应曲线的联系和理解。 二、实验仪器 1.EL-AT-II型自动控制系统实验箱一台 2.计算机一台 三、实验原理 1.模拟实验的基本原理 根据数学模型的相似原理,我们应用电子元件模拟工程系统中的典型环节,然后加入典型测试信号,测试环节的输出响应。反之,从实测的输出响应也可以求得未知环节的传递函数及其各个参数。 模拟典型环节传递函数的方法有两种:第一种方法,利用模拟装置中的运算部件,采用逐项积分法,进行适当的组合,构成典型环节传递函数模拟结构图;第二种方法将运算放大器与不同的输入网络、反馈网络组合,构成传递函数模拟线路图,这种方法可以称为复合网络法。本节介绍第二种方法。 采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络构成相应的模拟系统。将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,得到系统的动态响应曲线及性能指标。若改变系统的参数,还可进一步分析研究参数对系统性能的影响。 图1-1 模拟实验基本测量原理 模拟系统以运算放大器为核心元件,由不同的R-C输入网络和反馈网络组成的各种 典型环节,如图1-2所示。图中Z1和Z2为复数阻抗,它们都是由R、C构成。 基于图中A点的电位为虚地,略去流入运放的电流,则由图1-2得:
1 21 0)(Z Z u u s G - =-= 由上式可求得由下列模拟电路组成典型环节的传递函数及其单位阶跃响应。 2.一阶系统时域性能指标s r d t t t ,,的测量方法: 利用软件上的游标测量响应曲线上的值,带入公式算出一阶系统时域性能指标。 d t :响应曲线第一次到达其终值∞ y 一半所需的时间。 r t :响应曲线从终值∞y %10上升到终值∞ y % 90所需的时间。 s t :响应曲线从0到达终值∞y 95%所需的时间。 3.实验线路与原理(注:输入加在反相端,输出信号与输入信号的相位相反) 1.比例环节 K R R Z Z s G -=- =- =1 21 2)( 比例环节的模拟电路及其响应曲线如图1-3。 K ——放大系数。K 是比例环节的特征量,它表示阶跃输入后,输出与输 入的比例关系,可以从响应曲线上求出。改变1R 或2R 的电阻值便可以改变比例 图1-2 运放的反馈连接 t K -1 图1-3 比例环节的模拟电路及其响应曲线
线性控制系统的频率响应分析
一.实验目的 1.了解和掌握对数幅频曲线和相频曲线(波德图)、幅相曲线(奈奎斯特图)的构造及绘制方法。 2.二阶开环系统中的相位裕度和幅值穿越频率的计算。 二.实验内容及要求 1.一阶惯性环节的频率特性曲线测试。 2.二阶开环系统的频率特性测试,研究表征系统稳定程度的相位裕度和 幅值穿越频率对系统的影响。 三、实验主要仪器设备和材料 1.labACT自控/计控原理实验机一台 2.数字存储示波器一台 四、实验方法、步骤及结果测试 1.一阶惯性环节的频率特性曲线 惯性环节的频率特性测试模拟电路见图4-1。 图4-1 惯性环节的频率特性测试模拟电路 实验步骤:注:‘S ST'不能用“短路套”短接! (1)将数/模转换器(B2)输出OUT2作为被测系统的输入。 (2)按图4-1安置短路套及测孔联线。 (3)运行、观察、记录: ①运行LABACT程序,选择自动控制菜单下的线性控制系统的频率响应分析-实验项目,选择一阶系统,再选择开始实验,点击开始,实验机将自动产生0.5Hz~64Hz多个频率信号,测试被测系统的频率特性,等待将近十分钟,测试结束。 ②测试结束后,可点击界面下方的“频率特性”选择框中的任意一项进行切换,将显示被测系统的对数幅频、相频特性曲线(伯德图)和幅相曲线(奈 奎斯特图),同时在界面上方将显示点取的频率点的L、、Im、Re等相关数
据。如点击停止,将停止示波器运行,不能再测量数据。 ③分别改变惯性环节开环增益与时间常数,观察被测系统的开环对数幅频曲线、相频曲线及幅相曲线,在幅频曲线或相频曲线上点取相同的频率点,测量、记录数据于实验数据表中。 实验数据表1:改变惯性环节开环增益,(T=0.05,C=1u,R2=50K) 实验数据表2: 改变惯性环节时间常数, K=1(R1=50K、R2=50K) 2.二阶开环系统的频率特性曲线 二阶系统模拟电路图的构成如图4-2所示。
汽车运动控制系统仿真
一、摘要 2 二、课程设计任务 3 1.问题描述 3 2.设计要求 3 三、课程设计内容 4 1、系统的模型表示 4 2、利用Matlab进行仿真设计 4 3、利用Simulink进行仿真设计 9 总结与体会 10 参考文献 10
本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
一、课程设计任务 1. 问题描述 如下图所示的汽车运动控制系统,设该系统中汽车车轮的转动惯量可以忽略不计,并且假定汽车受到的摩擦阻力大小与汽车的运动速度成正比,摩擦阻力的方向与汽车运动的方向相反,这样,该汽车运动控制系统可简化为一个简单的质量阻尼系统。 根据牛顿运动定律,质量阻尼系统的动态数学模型可表示为: ???==+v y u bv v m 系统的参数设定为:汽车质量m =1000kg , 比例系数b =50 N ·s/m , 汽车的驱动力u =500 N 。 根据控制系统的设计要求,当汽车的驱动力为500N 时,汽车将在5秒内达到10m/s 的最大速度。由于该系统为简单的运动控制系统,因此将系统设计成10%的最大超调量和2%的稳态误差。这样,该汽车运动控制系统的性能指标可以设定为: 上升时间:t r <5s ; 最大超调量:σ%<10%; 稳态误差:e ssp <2%。 2.设计要求 1.写出控制系统的数学模型。 2.求系统的开环阶跃响应。 3.PID 控制器的设计 (1)比例(P )控制器的设计 (2)比例积分(PI )控制器的设计 (3)比例积分微分(PID )控制器的设计 利用Simulink 进行仿真设计。 二、课程设计内容 1.系统的模型表示
阶跃响应实验报告
信号与系统实验报告学院:电子信息与电气工程学院 班级: 13级电信<1>班 学号: 20131060104 姓名:李重阳
实验一 阶跃响应 一、实验目的 1.观察和测量RLC 串联电路的阶跃响应的波形和有关参数,并研究其电路元件参数变化对响应状态的影响; 2.掌握有关信号时域的测量方法。 二、实验原理说明 实验如图1-1所示为RLC 串联电路的阶跃响应的电路连接图。 图1-1 阶跃响应电路连接示意图 其响应有以下三种状态: (1) 当电阻R >2 L C 时,称过阻尼状态; (2) 当电阻R = 2 L C 时,称临界状态; (3) 当电阻R <2 L C 时,称欠阻尼状态。 现将阶跃响应的动态指标定义如下: 上升时间t r :y(t)从0到第一次达到稳态值y (∞)所需的时间。 峰值时间t p :y(t)从0上升到y max 所需的时间。 调节时间t s :y(t)的振荡包络线进入到稳态值的5±%误差范围所需的时间。 最大超调量δ:100%y y ) (y max δ p ?∞∞-= ? ?? ? ? ? 10K Ω 信号源 C2 P914 L1 W902 1 TP906 10mH P915 0.1μ 方波信号
5% y(∞) y(∞) y max t r t p t s y (t ) y max 图1-2 冲激响应动态指标示意图 冲激信号是阶跃信号的导数,所以对线性时不变电路冲激响应也是阶跃响应的导数。为了便于用示波器观察响应波形,实验中用周期方波代替阶跃信号。而用周期方波通过微分电路后得到的尖顶脉冲代替冲激信号。 三、实验内容 1.阶跃响应波形观察与参数测量 设激励信号为方波,其幅度为1.5V ,频率为500Hz 。 实验电路连接图如图1-1所示。 ① 连接P04与P914。 ② 调节信号源,使P04输出f=500Hz ,占空比为50%的脉冲信号,幅度调节为 1.5V ;(注意:实验中,在调整信号源的输出信号的参数时,需连接上负载 后调节) ③ 示波器CH1接于TP906,调整W902,使电路分别工作于欠阻尼、临界和过 阻尼三种状态,并将实验数据填入表格1-1中。表1-1 状 态 参数测量 欠 阻 尼 状 态 临 界 状 态 过 阻 尼 状 态 参数测量 R<316.23 tr= ts= δ= R=316.23 tr= R>316.23 波形观察
控制系统仿真实验报告
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
MATLAB下二阶系统的单位阶跃响应
二阶系统在不同参数下对单位阶跃信号的响应 一、二阶系统 所谓二阶系统就是其输入信号、输出信号的关系可用二阶微分方程来表征的系统。比如常见的RLC电路(图a)、单自由度振动系统等。 图a 图b 二阶系统传递函数的标准形式为 2 22 () 2 n n n H s s s ω ξωω = ++ 二、二阶系统的Bode图(nω=1) MATLAB程序为 >> clear >> num=[1]; >> den=[1 0.2 1]; >> bode(num,den); grid on hold on den=[1 0.4 1]; bode(num,den); >> den=[1 0.6 1]; >> bode(num,den); >> den=[1 0.8 1]; >> bode(num,den); >> den=[1 1.4 1]; >> bode(num,den); >> den=[1 2 1]; >> bode(num,den); >> legend('0.1','0.2','0.3','0.4','0.7','1.0')
运行结果为 三、二阶系统对单位阶跃信号的响应( =1) n MATLAB程序为 >> clear >> num=[1]; >> den=[1 0 1]; >> t=0:0.01:25; >> step(num,den,t) >> grid on >> hold on >> den=[1 0.2 1]; >> step(num,den,t) >> den=[1 0.4 1]; >> step(num,den,t) >> den=[1 0.6 1]; >> step(num,den,t) >> den=[1 0.8 1]; >> step(num,den,t) >> den=[1 1.0 1]; >> step(num,den,t)
典型系统的阶跃响应分析
自动控制理论实验报告 姓名 焦皓阳 学号 201423010319 班级 电气F1402 同组人 周宗耀 赵博 刘景瑜 张凯 实验一 典型系统的阶跃响应分析 一、实验目的 1. 熟悉一阶系统、二阶系统的阶跃响应特性及模拟电路; 2. 测量一阶系统、二阶系统的阶跃响应曲线,并了解参数变化对其动态特性的影响; 3. 掌握二阶系统动态性能的测试方法。 二、实验内容 1. 设计并搭建一阶系统、二阶系统的模拟电路; 2. 测量一阶系统的阶跃响应,并研究参数变化对其输出响应的影响; 3. 观测二阶系统的阻尼比分别在0<ξ<1,ξ>1两种情况下的单位阶跃响应曲线;测量二阶系统的阻尼比为2 1=ξ时系统的超调量%σ、调节时间t s (Δ= ±0.05); 4. 观测系统在ξ为定值n ω不同时的响应曲线。 三、实验结果【】 1、一阶系统 电路:
传递函数 2o(s) 1()21 R U R Ui s R CS =+ T=1结果:
T=0.1结果: 当T=1时:可以看出此时的稳态值为ΔY=4.4293,到达稳态的时间为ΔX=5.2664,调节时间为图二的ΔX=ts=2.757 当T=0.1时:由于此时的波形的起点没有在零点,所以存在着误差,此时的误差Δ=0-Y2=0.085,此时到达稳态时间为ΔX*13/21=0.5556,调节时间为X2在ΔY*0.95-Δ时的X2-X1=ts=0.375
结论:(参数变化对系统动态特性的影响分析) 参数的变化对系统动态性能的影响:T(周期)决定系统达到稳态时间的长短。在其他变量保持不变的情况下,当T 越小,该系统到达稳定状态所需时间就越少,系统对信号的响应也就越快。 2、二阶系统 电路: 传递函数 2 22221 ()1 ()Uo s C R S Ui s S RxC C R =++ (1)10n ω=,2.0=ξ结果:
第四章控制系统的频率特性
第四章控制系统的频率特性 本章要点 本章主要介绍自动控制系统频域性能分析方法。内容包括频率特性的基本概念,典型环节及控制系统Bode图的绘制,用频域法对控制系统性能的分析。 用时域分析法分析系统的性能比较直观,便于人们理解和接受。但它必须直接或间接地求解控制系统的微分方程,这对高阶系统来说是相当复杂的。特别是当需要分析某个参数改变对系统性能的影响时,需反复重新计算,而且还无法确切了解参数变化量对系统性能影响的程度。而频率特性不但可以用图解的方法分析系统的各种性能, 而且还能分析有关参数对系统性能的影响,工程上具有很大的实用意义。 第一节频率特性的基本概念 一、频率特性的定义 频率特性是控制系统的又一种数学模型,它是系统(或元件)对不同频率正弦输入信号的响应特性。对线性系统,若输入信号为正弦量,则其稳态输出信号也将是同频率的正弦量,但是输出信号的幅值和相位一般不同于输入量,如图4-1。 若设输入量为r(t)=A「sin( 3 t+ u r) 其输出量为c(t)=A c sin@ t+ u c) 若保持输入信号的幅值A r不变,改变输入信号的角频率3,则输出信号的角频率 也变化,并且输出信号的幅值和相位也随之变化。 图4-1控制系统的频率响应
我们定义系统(或环节)输出量与输入量幅值之比为幅值频率 特性,简称幅频 M( 3 )表示。输出量与输入量的相位差为相位频率特 3变化,常用U (3 )表示。其数学定义为 M "A U ( 3 )= U c - U 幅频特性和相频特性统称为频率特性,用 G(j 3 )表示。由此,幅频特性 M( 3 )又可 表示为|G(j ;i ),相频特性u (3 )又可表示为Z G(j ■),三者可表示成下面的形式: G(j a )=|G(j m )|Z G(j s ) M (co ) = G(jco) 「()二/G( j ?) 二、频率特性与传递函数的关系 频率特性和传递函数之间存在密切关系:若系统(或元件)的传递函数为 G(s), 则其频率特性为 G(j 3 )。这就是说,只要将传递函数中的复变量 s 用纯虚数j 3代替, 就可以 得到频率特性。即 G(s) > G(j ■) 三、频率特性的表示方法 1 .数学式表示法 频率特性是一个复数,所以它和其他复数一 | 样,可以表示为极坐标式、直角坐标和指数坐标 三种形式。见图 4-2所示。 G(j ?)二 G(j J- G(j ) 二U (■) jVC ) -M ( )e j () 显然, M =|G( j ⑷)| 2 (co )+V 2?) w G(j "arcta 说 例4-1写出惯性环节的幅频特性、相频特性和频率特性。 特性,它随角频率 3变化,常用 性,简称相频特性,它也随角频率 其中 图4-2频率特性的表示方法
基于MATLAB的控制系统单位阶跃响应分析
电子科技大学中山学院学生实验报告 学院: 机电工程学院 专业: 17自动化 课程名称:自动控制原理实验与仿真 班级: 姓名: 学号: 组别: 实验名称:基于MATLAB 的控制系统单位阶跃响应分析 实验时间: 成 绩: 批改时间: 一、 实验目的 (1)学会使用MATLAB 编程绘制控制系统的单位阶跃响应曲线。 (2)研究二阶控制系统中ζ ,ωn 对系统阶跃响应的影响。 (3)掌握准确读取动态特性指标的方法。 (4)分析二阶系统闭环极点与闭环零点对系统动态性能的影响。 二、 实验条件 实验设备:每人一台计算机奔腾系列以上计算机,配置硬盘≥2G,内存≥64M 。 实验软件:WINDOWS 操作系统(WINDOWS XP 或WINDOWS 2000),并安装MATLAB 语言编程环境。 三、实验内容 21001.(),3G s s s = +已知系统开环传递函数为试绘制单位负反馈闭环系统的阶跃响应曲线,并测出动态性能指标。 代码、曲线及性能指标: 代码 sys=tf(100,[1 3 0]); sysc=feedback(sys,1); damp(sysc) step(sysc) 曲线 性能指标 Pole Damping Frequency Time Constant (rad/seconds) (seconds) -1、50e+00 + 9、89e+00i 1、50e-01 1、00e+01 6、67e-01 -1、50e+00 - 9、89e+00i 1、50e-01 1、00e+01 6、67e-01
2.=n n ζωωζ当0,0.25,0.5,0.75,1,1.25时,对应系统的闭环极点 和自然振荡频率见表,编程求取对应系统的阶跃响应曲线,并分析一定时,变化对系统性能的影响。。 ζ 闭环极点 /(/)n rad s ω 阶跃响应曲线 =0ζ j ± 10 等幅振荡 =0.25ζ 2.59.68j -± 10 衰减振动 =0.5ζ 58.66j -± 10 衰减振动 =0.75ζ 7.5 6.61j -± 10 衰减振动 =1ζ 两实重根-10 10 单调上升 =1.25ζ 两不等实根 -5与-20 5,20 单调上升 曲线: 结论:可见当/(/)n rad s ω一定时,系统随着阻尼比ξ增大,闭环极点的实部在S 左半平面的位置更加远离原点,虚部减小到0,超调量减小,调节时间缩短,稳定性更好。 0.25,10,30,50n n ζωζ==3.时,对应点的单位阶跃响应曲线并分析不变,对系统性能的影响。 曲线:
2. 实验二 二阶系统阶跃响应
实验二二阶系统阶跃响应 一、实验目的 1. 研究二阶系统的特征参数,阻尼比ζ和无阻尼自然频率ωn对系统动态性能的影响,定量分析ζ和ωn与最大超调量σp和调节时间ts之间的关系。 2. 进一步学习实验系统的使用。 3. 学会根据系统的阶跃响应曲线确定传递函数。 4. 学习用MATLAB仿真软件对实验内容中的电路进行仿真。 二、实验原理 典型二阶闭环系统的单位阶跃响应分为四种情况: 1)欠阻尼二阶系统 如图1所示,由稳态和瞬态两部分组成:稳态部分等于1,瞬态部分是振荡衰减的过程,振荡角频率为阻尼振荡角频率,其值由阻尼比ζ和自然振荡角频率ωn决定。 (1)性能指标: : 单位阶跃响应C(t)进人±5%(有时也取±2%)误差带,并且不再超出该误差带的调节时间t S 最小时间。 超调量σ% ;单位阶跃响应中最大超出量与稳态值之比。 单位阶跃响应C(t)超过稳态值达到第一个峰值所需要的时间。 峰值时间t P : 结构参数ξ:直接影响单位阶跃响应性能。 (2)平稳性:阻尼比ξ越小,平稳性越差 长,ξ过大时,系统响应迟钝,(3)快速性:ξ过小时因振荡强烈,衰减缓慢,调节时间t S 也长,快速性差。ξ=0.7调节时间最短,快速性最好。ξ=0.7时超调量σ%<5%,调节时间t S 平稳性也好,故称ξ=0.7为最佳阻尼比。 2)临界阻尼二阶系统(即ξ=1) 系统有两个相同的负实根,临界阻尼二阶系统单位阶跃响应是无超调的,无振荡单调上升的,不存在稳态误差。
3)无阻尼二阶系统(ξ=0时)此时系统有两个纯虚根。 4)过阻尼二阶系统(ξ>1)时 此时系统有两个不相等的负实根,过阻尼二阶系统的单位阶跃响应无振荡无超调无稳态误差,上升速度由小加大有一拐点。 三、实验内容 1. 搭建模拟电路 典型二阶系统的闭环传递函数为: 其中,ζ 和ωn对系统的动态品质有决定的影响。 搭建典型二阶系统的模拟电路,并测量其阶跃响应: 二阶系统模拟电路图其结构图为: 系统闭环传递函数为: 式中, T=RC,K=R2/R1。 比较上面二式,可得:ωn=1/T=1/RC ζ=K/2=R2/2R1。 2 2 2 2 ) ( ) ( ) ( n n n w s w s w s R s C S + + = = ξ φ