基于ProE螺旋榨汁机的设计

摘要:Pro/ENGINEER Wildfire野火版2.0以其易学易用、功能强大和互连互通的特点,推动了整个产品开发机构中个人效率和过程效率的提高。它既能节省时间和成本,又能提高产品质量。基于Pro/E的强大功能,本设计利用Pro/E完成了螺旋式连续榨汁机的设计,螺旋式连续榨汁机以其结构简单、操作方便、榨汁效率高等优点而得到广泛应用。就目前来讲,螺旋式连续榨汁机主要应用在食品方面,用于榨取苹果、梨、番茄、菠萝、桔子、胡萝卜等果蔬的汁液。
关键字:Pro/E;榨汁机;螺旋
前言
传统的通用机械产品的设计是首先将产品以平面的形式表达出来,然后进行反复校核和修改,最后由加工者把图样上的内容转化为成形的产品,这样不仅设计周期长,成本高,而且当产品制造出来后,经常会出现零部件之间相互干涉,无法安装和装配到位等重大设计失误,如此反复修改也延长了产品投放市场的周期。鉴于通用机械的使用范围广,设计行业多,这就对通用机械的可靠性、稳定性和通用性提出了较高的要求。目前世界上应用最为泛的高档三维商业软件Pro/E就可以很好地解决这些问题。Pro/E直接采用三维设计,使设计者能了解产品的每一个细节,并利用其参数化设计的思想,使零件的设计、修改变得简单易行,同时还可以完成产品的系列化设计。另外利用Pro/E的分析功能,可以完成机构运动学、动力学仿真和有限元分析。
进入21世纪后,随着我国水果产量的大幅度提高和鲜销市场的逐渐饱和,“卖果难”愈演愈烈。另外,由于我国经济实力的增强及人民生活水平的提高,果汁加工业又进入一新的发展时期。榨汁机是果品行业的重要组成部分。因此,对榨汁机设备的研究势在必行。要求设计研究出结构简单、成本低、效率高的榨汁设备。基于Pro/E的强大功能,本设计利用Pro/E完成了螺旋式连续榨汁机其结构简单、操作方便、榨汁效率高等优点的设计。
1 总体方案设计
1.1 整体布局设计
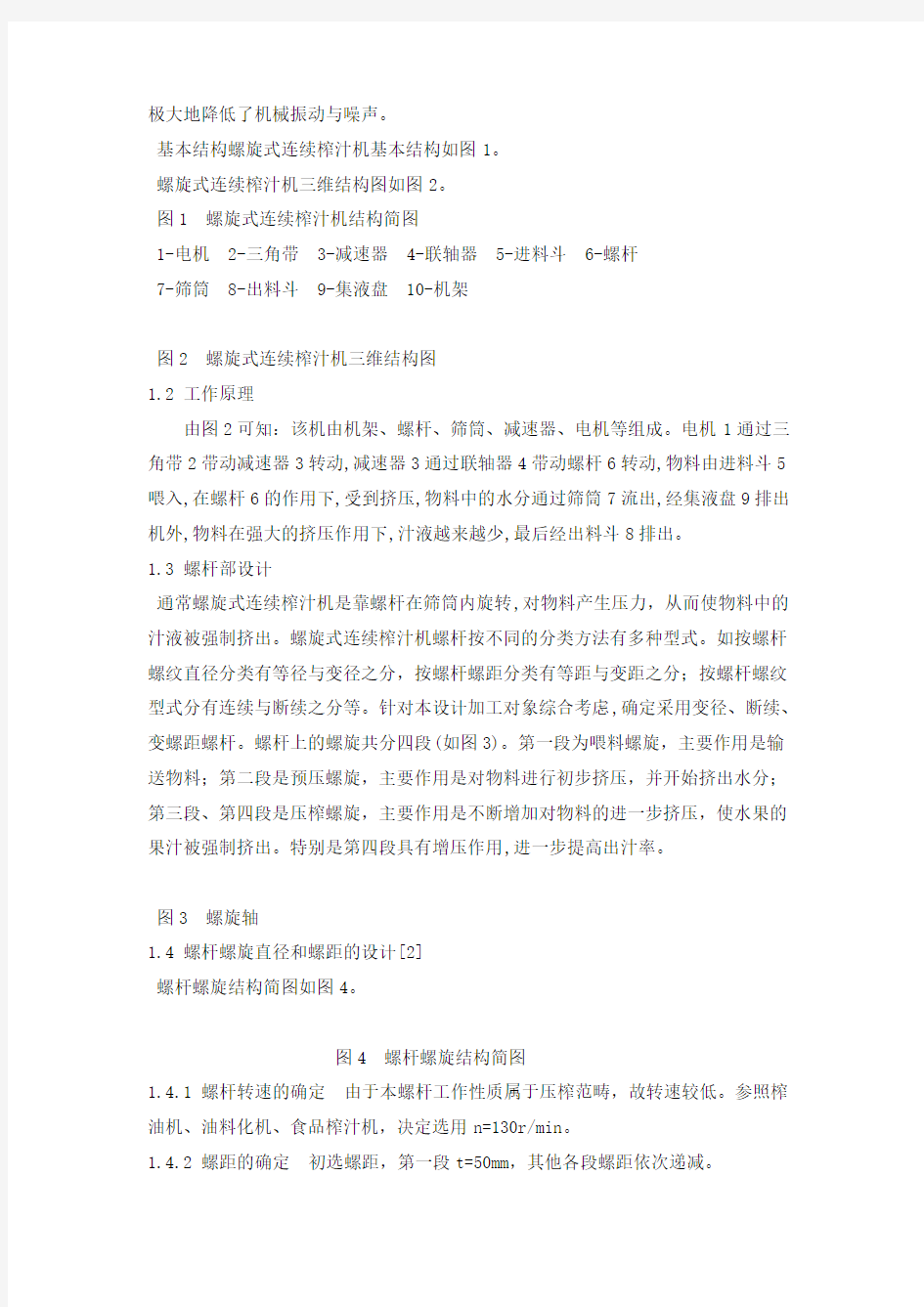
本设计在布局上采用折叠式,即螺杆、减速器在一个水平面上,将电机置于另一个水平面上(见图1)。这样布置,一是较大幅度减少了整机长度,提高了设备刚度,节省了原材料,降低了成本;二是电机与减速器之间采用三角带传动,起到了缓冲作用,可避免因原料带入异物造成螺杆堵转、引起瞬间负荷过大时,烧坏电机或损坏减速器等故障的发生;三是由于电机位置较低、以及在电机与减速器之间采用三角带传动,
极大地降低了机械振动与噪声。
基本结构螺旋式连续榨汁机基本结构如图1。
螺旋式连续榨汁机三维结构图如图2。
图1 螺旋式连续榨汁机结构简图
1-电机2-三角带3-减速器4-联轴器5-进料斗6-螺杆
7-筛筒8-出料斗9-集液盘 10-机架
图2 螺旋式连续榨汁机三维结构图
1.2 工作原理
由图2可知:该机由机架、螺杆、筛筒、减速器、电机等组成。电机1通过三角带2带动减速器3转动,减速器3通过联轴器4带动螺杆6转动,物料由进料斗5喂入,在螺杆6的作用下,受到挤压,物料中的水分通过筛筒7流出,经集液盘9排出机外,物料在强大的挤压作用下,汁液越来越少,最后经出料斗8排出。
1.3 螺杆部设计
通常螺旋式连续榨汁机是靠螺杆在筛筒内旋转,对物料产生压力,从而使物料中的汁液被强制挤出。螺旋式连续榨汁机螺杆按不同的分类方法有多种型式。如按螺杆螺纹直径分类有等径与变径之分,按螺杆螺距分类有等距与变距之分;按螺杆螺纹型式分有连续与断续之分等。针对本设计加工对象综合考虑,确定采用变径、断续、变螺距螺杆。螺杆上的螺旋共分四段(如图3)。第一段为喂料螺旋,主要作用是输送物料;第二段是预压螺旋,主要作用是对物料进行初步挤压,并开始挤出水分;第三段、第四段是压榨螺旋,主要作用是不断增加对物料的进一步挤压,使水果的果汁被强制挤出。特别是第四段具有增压作用,进一步提高出汁率。
图3 螺旋轴
1.4 螺杆螺旋直径和螺距的设计[2]
螺杆螺旋结构简图如图4。
图4 螺杆螺旋结构简图
1.4.1 螺杆转速的确定由于本螺杆工作性质属于压榨范畴,故转速较低。参照榨油机、油料化机、食品榨汁机,决定选用n=130r/min。
1.4.2 螺距的确定初选螺距,第一段t=50mm,其他各段螺距依次递减。
物料移动速度(m/s)计算:
v===1.08m/s
螺旋式连续榨汁机的生产能力公式如下:
G=3600FvρΦ(kg/h)
式中::G—生产率,本设计取G=1000kg/h;
F—螺杆螺旋送料的断面面积(m2);
ρ—物料容积密度,本设计取ρ=400kg/m;
Φ—充填系数,本设计取Φ=0.2。
将参数代入得:
1000=3600×F×1.08×400×0.2
解得:F≈0.0321(m)
根据螺杆螺旋送料的断面面积计算公式:
F=
式中:d—螺杆螺旋送料的断面大径(m);
d—螺杆螺旋送料的断面小径(m);本设计根据强度
计算得d=0.09m;
将有关数据代入得,则可求得:
d≈0.2213m
取螺杆螺旋送料的断面大径d=0.24 m。
1.5 功率计算[9]
榨汁机的功率消耗包括两方面:压缩物料所消耗的功率;使物料移动消耗的功率。在这里,把轴与轴承摩擦等所消耗的功率算入机械效率中。
设压缩物料所消耗的功率为P:
P= (1+2+3+…+Z)(W)
=0.0321
=2891.5W
式中:——相邻螺距大小之差,m;
Z——螺距数目;
——物料所受的最大压力,取0.83MPa;
——螺旋外径,m;
——螺旋内径,m。
设使物料移动所消耗的功率为P:
P=mv= (W)
式中: m——物料的质量kg;
t——物料运动时间s。
而
=G (生产能力)
v=
所以:
P==(W)
=
=60.5w
则消耗的功率为:
P= (W)
=
=3657.1w
式中:——传动效率。
由电动机至工作机之的总效率[7](包括工作机效率)为:
式中:、、、、分别为带传动、齿轮传动的轴承、齿轮传动、联轴器、螺杆轴的轴承的效率。
取=0.96、=0.99、=0.97、=0.97、=0.98、则:
=0.96×0.99×0.97×0.97×0.98
=0.81
2 选择电动机
按已知的工作要求和条件,选用Y型全封闭鼠笼型三相异步电动机[7]。
2.1 选择电动机功率
榨汁机所需的电动机输出功率为:
P= P= (W)
=
=3657.1w
2.2 确定电动机转速[6]
旋转轴的工作转速为:n=130r/min,按推荐的合理传动比范围,取带传动的传动i =2—4,减速器的传动比i=4—12.5,则合理总传动比的范围为i=8—50,故电动机转速的可选范围为:
(8-50)130=1040-6500 r/min
符合这一范围的同步转速有1500 r/min,3000r/min再根据计算出的容量,查出有这几种适用的电动机型号见表1,其技术参数传动比的比较情况见下表。
表1 电动机型号和技术参数及传动比
方案电动机型号额定
功率电动机转速传动装置的传动比
P/kW 同步
转速满载
转速总传
动比带减速箱
1 Y112M 4 1500 1440 11.08 2.8 4
2 Y112M 4 3000 2920 22.4 2.8 8
综台考虑电动机和传动装置的尺寸、重量以及带传动和减速器的传动比,可知方案2比较适合。因此选定电动机型号为Y112M。所选电动机的额定功率=4kw,满载转速=1440r/min,总传动比适中,传动装置结构较紧凑。
所选电动机的主要外形尺寸和安装尺寸如图5和下表2所示:
图5 电动机结构简图
表2 电动机的主要外形尺寸和安装尺寸
中心高H 外形尺寸L(AC/2+AD)HD 底脚安装AB 地脚螺栓空直径
K 轴伸尺寸DE 装键部位尺寸
FGD
112 400305265 180140 12 2860 836
3 计算总传动比和分配传动比
由选定电动机的满载转速和工作机主动轴的转速,可得传动装置的总传动比为: i==
计算出总传动比后,应合理地分配各级传功比,限制传动件的圆周速度以减小动载荷,降低传动精度等级。分配各级传动比时考虑到以下几点:各级传动的传动比应在推拌的范围内选取;应使传动装置的结构尺寸较小、重量较轻;应使各传动件的尺寸协调,结构匀称、合理,避免互相干涉碰撞。故 V带传功比取2.8,减速器传功比取4。
4 计算传动装置的运动和动力参数[7]
进行传动件的设计计算,先推算出各轴的转速、功率和转矩。按内电动机至工作机之间运动传递的路线推算各轴的运动和动力参数如表3。
4.1 各轴转速
===514.3
=128.6
式中:为电动机的满载转速,单位为;,分别为减速器输入轴和榨汁机螺旋轴的转速,单位为;为电动机至减速器输入轴的传动比;为减速器的传动比。
4.2 各轴的输入功率
=
=40.96
=3.84kW
=
=3.840.95
=3.65 kW
式中:为电动机的输出功率,单位为kW;、分别为减速器输入轴和榨汁机螺旋轴的输入功率,单位为kW;、分别为电动机轴与减速器输入轴、减速器输入轴与榨汁机螺旋轴间的传动效率。
4.3 各轴转矩
=
=26.52.80.96
=71.3 N·m
=
=71.340.95
=271.0 N·m
式中:、分别为减速器输入轴和榨汁机螺旋轴的输入转距,单位为N·m;为电动机铀的输出转矩,
单位为N·m。
的计算公式为:
=9550
=9550
=26.5 N·m
表3 传动装置的运动和动力参数
轴名参数电动机轴减速器螺旋轴
转速n/(r/min) 1440 514.3 128.6
输入功率P/kW 4 3.84 3.65
输入转矩T/( N·m) 26.5 71.3 271.0
传动比i 2.8 4
效率 0.96 0.95
5 设计V带
5.1 确定计算功率[3]
因为工作机是螺旋榨汁机,故属于载荷变动较大的机械,原动机是交流电动机(普通转矩鼠笼式),工作时间小于10小时/天,启动形式为软启动。
故: =1.2
——工作情况系数取=1.2。
5.2 选择V带的型号[3]
根据计算功率和小带轮转速,得A,B型均可,选择A型普通V带。
5.3 确定带轮基准直径和
5.3.1 初选主动轮的基准直径[3] 根据所选V带型号参考,选取,选。
5.3.2 验算带的速度V
5.3.3 计算从动轮直径
5.4 确定传动的中心距a和带长
初定中心距,由
即:
即:,取500mm。
计算基准带长:
选取带的基准长度,查表[3]得:
计算实际中心距,由公式:
考虑安装调整和补偿初拉力的需要,中心距的变动范围为:
5.5 验算主动轮的包角
根据公式及对包角的要求,应保证:
5.6 确定V带的根数Z
根,取Z=3根。
式中:——在包角=180度,特定长度,工作平稳情况下,单根普通带的许用功率值;
——考虑包角不同时的影响系数,简称包角系数;
——考虑带的长度不同的影响系数,简称长度系数。
查得:=1.37 =0.93 =0.96
式中:K——材质系数;
——计入传动比的影响时,单根V带所能传递的功率的增量。
计算公式为:;
式中:——单根普通V带所能传递的转矩的修正值;
——主动轮的转速。
5.7 确定带的初拉力
单根V带的初拉力由下式确定:
5.8 求带传动作用在轴上的压力
式中:Z——带的根数;
——单跟带的初拉力;
——主动轮上的包角。
5.9 V带设计计算列表如表4
表4 V带设计计算列表如下:
设计计算项目结果说明
工作情况系数k 1.2
计算功率P 4.8
选取V带型号 A
小带轮直径D 100mm 可选比表中大的值
大带轮直径D 280mm
验算V带的速度V 5.23m/s
初定中心距a 500mm 参考实际机械结构确定初算V带所需的基准长度L 1613.15mm
选V带的基准长度L 1633mm
定V带公称长度L 1600mm
定中心距a 510mm
包角 158 〉120,合适
包角系数k 0.93
长度系数k 0.96
材质系数k 1 化学线绳结构的胶带
单根V带所能传递的功率P 0.995
单根V带功率增量P 0.12kw
单根V带传递扭矩的修正值T 1.2
V带根数Z 3根
每米V带质量 0.10kg/m
单根V带的初拉力F 111N
轴上的压力Q 1090N
计算结果汇总:V带规格:A型,长1600mm
V带根数:3根
中心距: 510mm
轴上压力:1090N
6 带轮的设计
6.1 材料
带轮常用材料是铸铁,因为带速v<25m/s,所以选用HTl50。
6.2 带轮的形式[3]
带轮的结构由带轮直径大小而定,因带轮基准直径D<(2.5-3)d(为轴的直径),所以小带轮采用实心式;对于大带轮,因D<300mm,故大带轮采用腹板式。
6.3 带轮尺寸设计计算
小带轮的轴孔直径,小带轮(如图6和图7)与电动机相连,故d=28mm。
=(1.8—2)d=(1.8—2),取50mm。
小带轮的宽度及直径计算:
B=(z—1)t+2s=mm
D=D+2f=100+23.5=107 mm
L=(1.5-2)d=(1.5, 取56 mm。
图6 小带轮示图
图7 小带轮三维图
大带轮的轴孔直径,大带轮(如图8和图9)与减速器相连其轴孔直径与NGW-41型减速器输入轴直径一致,故d=50 mm。
=(1.8—2)d=(1.8—2),取90mm。
大带轮的宽度:B=52 mm
D=D+2f=280+23.5=287 mm
L=56 mm
C=20 mm
图8 大带轮示图
图9 大带轮三维图
7 联轴器的选用[6]
考虑榨汁机的工作环境和工作情况,主要是旋转轴有轴向位移。可移式联铀器允许两轴有一定的安装误差,它对两轴间的偏移有一定的补偿能力。所以选具有对两轴间的偏移有一定的补偿能力的可移式联铀器——十字滑块联轴器。
如图所示:十字滑块联轴器由两个半联轴器如图10与十字滑块图11组成。十字滑块2两侧互相垂直的凸携分别与两个十两联轴器的凹槽组成移动副。联轴器工作时,十字滑块随两轴转动,同时又相对于两轴移动以补偿两轴的径向位移。这种联轴器允许的径向偏量较大(y<0.04d,d为轴的直径)。允许有不大的角度位移和轴向位移。由于十字滑块偏心回转会产生离心力,不用于高速场合。为了减少十字滑块相对移动时的磨损及提高传动效率,需要定期进行润滑。
图10 半联轴器
图11 十字滑块
8 螺旋轴的设计[3]
8.1 材料的选取
螺旋杆是螺旋榨汁机的主要工作部件,采用不锈钢材料铸造后精加工制成。
8.2 拟订轴上零件的装配方案
螺旋杆的外型如图12所示:
图12 螺旋轴示图
8.3 初步确定轴的最小直径
按扭转强度来初步确定:
轴的材料查表选用调质处理的45钢,=650M,由查表取A=110,于是的:
=110
输出轴的最小直径显然是安装联轴器的轴的直径,为了使所选的轴的直径与联轴器的孔径相适应,即,满足强度要求。故选择轴孔直径为50mm的联轴器,根据传动类型,选用了十字滑块联轴器,半联轴器长100mm。
8.4 根据轴上定位的要求确定轴的各段直径和长度
为了满足半联轴器的轴向定位要求,轴段右侧设定位轴肩,该轴段直径为62mm; 左段用轴端挡圈定位,按轴端直径取挡圈直径D=65mm。因半联轴器长L=100mm,
而半联轴器与轴配合部的长度L=80mm,现取L12=80mm。
初步选择滚动轴承。由于设计的是螺旋压榨机,所设计的是螺旋轴,轴承同时受有径向力和轴向力,又根据d23=62mm,初步选择单列圆锥滚子轴承30213,其尺寸为,故d34=d89=65mm,L34=L89=36mm。
为了右段滚动轴承的轴向定位,需将L56段直径放大以构成轴肩。有手册上查得,对30213轴承,它的定位轴肩高度最小为6mm,现取d56=78mm(即定位轴肩高度为6.5mm)。
轴承端盖的总宽度为20mm。根据轴承端盖的装拆既便于对轴承添加润滑脂的要求,取端盖的外端面与半联轴器右端面的距离为30mm,故取L23=50mm。
取安装螺旋片的轴段的直径为L56=90mm,长度为320mm,为进一步增大压力,提高出汁率,设计L67为锥形轴,取为L67=300mm,大段直径为d=189mm。螺旋轴三维图如图13。
8.5 轴上零件的周向定位半联轴器与轴轴向定位采用平键联接。按由手册查得平键bh=1610(GB1095—79),键槽用键槽铣刀加工,长55mm,配合选为H7/k6,滚动轴承与轴的轴向定位是借用配合来保证的,此处选H7/m6。
8.6定圆角半径值轴肩处的圆角半径的值r=1.5mm,轴段倒角,在轴的两端均为。
图13 螺旋轴三维图
8.7 按弯扭合成条件校核轴的强度[1]
8.7.1作轴的计算简图14
图14 轴的计算简图
8.7.2 求轴上所受作用力的大小
8.7.3 轴垂直面内所受支反力
R=N
R=F- R=2466-759=1707N
8.7.4 作弯矩图
轴上BCD三点的弯矩
M=M=0
M= R=759200=151800N·mm
8.7.5 作扭矩图
T9550000
=9550000
=271053Nmm
8.7.6 作当量弯矩图
B点:M=aT
=0.59271053
=159921Nmm
C点:M=
=310666Nmm
D点:M=0
8.8 校核轴的强度[1]
只校核轴上承受最大当量弯矩的强度由:
查表,对于=600MPa的碳钢,承受对称循环应力时的需用应力[]=55MPa>=9.06MPa,故安全。
9 筛筒部设计
筛筒部的筛筒(如图15和图16)上有许多筛孔,被榨出的汁液就是从这里流出的。筛孔的设计十分重要,它的主要参数包括:筛孔大小和分布密度。为了确保被榨出的汁液能够及时从筛孔中流出,筛筒筛孔的孔隙率越大越好。又由于筛筒要求承受螺旋挤压产生的强大压力,所以孔隙率也不能太大。通常孔隙率选择原则有:筛筒刚度好时,选大些;筛筒刚度差时,选小些。筛孔大时,孔隙率取较大值;筛孔小时,孔隙率取较小值。
筛孔直径的选择:一般来讲,筛孔直径越大,越有利于汁液的排出;相反,筛孔直径越小,越不利于汁液的排出,过小时,就不能保证汁液的排出。选择筛孔时,首先要考虑所加工物料的粒径大小,加工物料的单个粒径大时,筛孔直径选择也要相应大些,以利于汁液排出。但也不能过大,否则,可能会造成较大的料损;加工物料的粒径小时,筛孔直径选择也要相应小些,但也不能太小,因为筛孔太小时,容易造成堵塞,不能保证汁液顺利流出。目前,筛孔直径的选择方法主要有定性选择法和经验选择法,—般要经过两到三
次试验确定。圆筒筛用2mm厚的lGrl8Ni9Ti不锈钢板
冲直径为2mm孔制作,孔间距离2mm。圆筒筛的内径为240mm。长为570mm。为了确保筛筒内物料清理方便,筛筒设计成上下两半,中间用螺栓连接。
图15 下半筛筒
图16 上半筛筒
10 轴承端盖的设计[8]
10.1材料
材料选用HT150。因凸缘式轴承端盖调整间隙比较方便,密封性也好,故选用凸缘式结构。为了调整轴承间隙,在端盖与轴承座之间放置由若干薄片组成的调整垫片,同时也起到密封的作用。轴承端盖简图见图17,轴承端盖三维图见图17。
10.2 凸缘式轴承端盖各尺寸计算:
D0=D+2.5d=120+2.512=150mm
D1=D-(10-15)=120-(10-15)=105-110mm,取D1=110mm。
D2=D0+2.5d=150+2.512=180mm
e=1.2d=12.5mm
m>e=12.5mm,取m=28.5mm。
图17 轴承端盖简图
图18 轴承端盖三维图
11螺旋轴组件的制作过程[5]:
新建装配件,输入组件名称asm0002,单击确定,如图19:
图19 新建组件asm0002
单击主窗口右侧增加组件的图标选取要装配的零件zhuzhou。见图20。
图20 选取零件zhuzhou
单击组件放置对话框在缺省位置组装组件的图标,单击确定。见图21。
图21 固定零件zhuzhou
新建四个基准面:DTM1,DTM2,DTM3,DTM4。见图22。
图22 新建四个基准面
再单击增加组件的图标,选取螺旋片1,单击确定,见图23。
图23 TOP面与zhuzhou的TDM4面匹配
加入第一个装配限制条件,选取螺旋片1的TOP面与zhuzhou的TDM4面,输入间距:0,使之匹配。见图24。
图24 两零件的Front面匹配
加入第二个装配限制条件,选取zhuzhou的Front面与螺旋片1的Front面,输入间距:0,使之匹配。见图25。
图25 两零件的right面匹配。
加入第三个装配限制条件,选取zhuzhou的right面与螺旋片1的right面,输入间距:0,使之匹配。
图26 螺旋轴组件
重复以上步骤,分别装配螺旋片2,3,4。完成螺旋轴的装配,如图26。
12 致谢
在设计过程中,指导教师肖念新对我进行了悉心指导和帮助,并为我提供了大量的相关书籍和资料,对设计顺利的完成帮助很大。在这里衷心感谢肖老师的指导。
The design of spiral juice extractor on the based Pro/E
Yujunbo
(Dpet.of Machinery and Electron,
Hebei Noemal University of Science & Technology)
Abstract: Pro/ENGINEER Wildfire prairie fire edition is 2. 0 easy to learn and use , not powerful to with characteristic of interconnection and interflow , promote whole product development personal efficiency and improvement, course of efficiency in the organization with it. It can not only can save the time and cost improve product quality but also. On the basis of the strong function of Pro/E , originally design the design utilizing Pro/E to finish the spiral type continuous juice extractor, the spiral type continuous juice extractor is of simple structure , easy to operate , presses the high advantage of juice efficiency but used widely with its . As to at present, the spiral type continuous juice extractor is used in food mainly, for squeezing the juices of such fruits and vegetables as the apple、pear、tomato、pineapple、orange、carrot etc. Keywords: Pro/E ;juice extractor ;spiral type
参考文献:
[1]刘长荣肖念新工程力学[M] 中国农业科技出版社2002.2
[2]张裕中食品加工技术装备中国轻工业出版社2000.3
[3]刘长荣郑玉才机械设计基础(下)[M] 中国农业科技出版社2002.2
[4]林清安Pro/ENGINEER Wildfire零件设计基础篇(上)[M] 中国铁道出版社2004.5
[5]林清安Pro/ENGINEER Wildfire零件设计基础篇(下)[M] 中国铁道出版社2004.5
[6]朱龙根简明机械零件设计手册机械工业出版社[M] 1997.11
[7]垄溎义机械设计课程设计指导书高等教育出版社[M] 1982.9
[8]杨永才机械设新标准手册计[M] 北京科学技术出版社[M] 1993.8
离心式水果榨汁机的机械设计
离心式水果榨汁机的机械设计 摘要 摘要:随着科学技术的不断发展,农业机械化技术也发展到了一个新的水平;随着农业机械化技术的发展和人们生活水平的提高,水果榨汁机的改进成为目前消费者关心的热点问题。本设计介绍了榨汁机的研究意义、榨汁机的研究现状,分析了榨汁机的发展前景,详细讲述了离心式榨汁机的工作原理,是利用刀片和离心力共同的作用下,将大块水果旋转打成糊状。榨汁机的结构也相对简单,包括榨汁壳体榨汁部分电动机部分和出汁部分组成。这次和同组人员一起设计的离心式榨汁机能够更独特地更好地满足消费者的意愿,本着简单、方便、实用为原则一切从消费者的利益出发。而且,该榨汁机祛除了以前榨汁机出汁率底、果汁不清的弊端。单相串激式电动机充分体现了自动化、高效化、小型化、简单化、环保化等特点。 最后,我相信我们所设计的这台集专业化、智能化、自动化、高效化、小型化、简单化、环保化、安全性为一体的水果榨汁机能够早日走进千家万户。 关键词:离心式榨汁机、电机选配、壳体设计、榨汁部件设计
The Mechanical Design of Centrifugal Juice Extractor ABSTRACT Abstract: With the continuous development of science and technology, agricultural mechanization technology development to a new level; with the development of agricultural mechanization technology and people living standard rise, the improvement of fruit juicer became a hot issue of consumer concern right now. Juicer this design introduced the research significance, research status quot of juicer, analyzes the prospect of juicer, centrifugal juicer is described in detail the working principle of the common is the use of blades and centrifugal force, under the action of the large fruit rotation until sticky. The structure of the juicer is relatively simple, including juice shell Motor parts and the juice of part of the juice. This group design with centrifugal juicer is more unique to better meet consumers' willingness to all in line with simple, convenient and practical for the principle from the interests of consumers. Moreover, the juicer before removing the juicer end of juice yield, fruit juice is not clear. Single-phase series motor autoimmune and high efficiency fully embodies the, miniaturization and simplification, environmental protection, etc. Finally, I believe that we can design the machine set autoimmune and high efficiency, intelligent, professional, miniaturization, simplification, environmental protection, safety of fruit juicer can walk into homes at an early date. Keywords:centrifugal juice extractor, the choice of electromagnet, The design of rind, the design of squeeze parts
PROE螺纹三种画法
基于Pro/E 3.0创建螺纹的三种方法 ——原创:哈尔滨工业大学翟万柱 笔者是Pro/E的初学者,在这里仅就个人在Pro/E学习中的点滴心得与大家分享,希望大家提出宝贵意见、多多批评,以求共同进步。 螺纹机构是机械行业普遍应用的一种机构,为创建螺纹的方便Pro/E中设立有强大的螺旋扫描功能,可以实现螺纹、弹簧等基于螺旋线多种特征,其中的变节距螺旋扫描功能更是为螺旋类特征的灵活创建提供的广阔的空间,本文最后将介绍变节距弹簧的建模过程。 在掌握直接应用内建功能实现螺旋特征创建的同时,笔者认为从理论原理出 发,通过基础建模功能实mouse曲面.prt.1 现设想功能也是十分必要的。不但对 其他三维软件学习起到借鉴作用,同时也可以在内建功能不能满足要求的时候通过基础功能的灵活运用达到目的,并可以对Pro/E3.0的基本功能和机械基础知识增进了解。 方法一: 首先,应用“插入”(Insert)>“扫描”(Sweep)>“伸出项”(Protrusion)功能进行普通梯形螺纹的建模。 想必大家对此功能都已熟悉,唯一值得讨论的地方也是重要的地方可能就是螺旋线的生成问题了。简单易行的方法就是用方程建立曲线,而且可以容易的与参数建立关系,使得生成特征具有通用性。 常用参数方程如下:(应用时注意坐标系的选择与类型的设定) 笛卡儿坐标下的螺旋线柱坐标下的螺旋线x = radia * cos ( t *(n*360)) r=radia y = radia * sin ( t * (n*360)) theta=theta0+t*(n*360) z = l*t z=t*l 其中:radia为半径;n为指定长度上螺旋线的圈数;l为设定长度。 n=l/螺距;多头螺纹生成需要多条螺旋线,注意生成其他螺旋线时须设定参数方程中角度的初始值;对于左旋螺纹参数方程中角度值取负 值。 生成螺旋曲线方法为:单击“插入”(Insert)>“模型基准”(Model Datum)> “曲线”(Curve),或单击“基准”(Datum)工具栏上的按钮。然后选择“从方程”(From Equation),接下来选择坐标系并指定坐标系类型后,既可在编辑窗口中输入相关参数方程,得到目的曲线。 此种方法虽然简单、快结,但需要熟悉参数方程,并熟练坐标系的设定。对于象笔者这样数学不佳,又相对懒惰的朋友,是否有更直观的方法可行呢?答案是肯定的。
PROE螺纹画法
Pro/E 3.0创建螺纹的方法 笔者是Pro/E的初学者,在这里仅就个人在Pro/E学习中的点滴心得与大家分享,希望大家提出宝贵意见、多多批评,以求共同进步。 螺纹机构是机械行业普遍应用的一种机构,为创建螺纹的方便Pro/E中设立有强大的螺旋扫描功能,可以实现螺纹、弹簧等基于螺旋线多种特征,其中的变节距螺旋扫描功能更是为螺旋类特征的灵活创建提供的广阔的空间,本文最后将介绍变节距弹簧的建模过程。 在掌握直接应用内建功能实现螺旋特征创建的同时,笔者认为从理论原理出发,通过基础建模功能实现设想功能也是十分必要的。不但对其他三维软件学习起到借鉴作用,同时也可以在内建功能不能满足要求的时候通过基础功能的灵活运用达到目的,并可以对Pro/E3.0的基本功能和机械基础知识增进了解。 方法一: 首先,应用“插入”(Insert)>“扫描”(Sweep)>“伸出项”(Protrusion)功能进行普通梯形螺纹的建模。 想必大家对此功能都已熟悉,唯一值得讨论的地方也是重要的地方可能就是螺旋线的生成问题了。简单易行的方法就是用方程建立曲线,而且可以容易的与参数建立关系,使得生成特征具有通用性。
常用参数方程如下:(应用时注意坐标系的选择与类型的设定)笛卡儿坐标下的螺旋线柱坐标下的螺旋线x = radia * cos ( t *(n*360)) r=radia y = radia * sin ( t * (n*360)) theta=theta0+t*(n*360) z = l*t z=t*l 其中:radia为半径;n为指定长度上螺旋线的圈数;l为设定长度。 n=l/螺距;多头螺纹生成需要多条螺旋线,注意生成其他螺旋线时须设定参数方程中角度的初始值;对于左旋螺纹 参数方程中角度值取负值。 生成螺旋曲线方法为:单击“插入”(Insert)>“模型基准”(Model Datum)>“曲线”(Curve),或单击“基准”(Datum)工具栏上的 按钮。然后选择“从方程”(From Equation),接下来选择坐标系并指定坐标系类型后,既可在编辑窗口中输入相关参数方程,得到目的曲线。 此种方法虽然简单、快结,但需要熟悉参数方程,并熟练坐标系的设定。对于象笔者这样数学不佳,又相对懒惰的朋友,是否有更直观的方法可行呢?答案是肯定的。 下面笔者就以变截面扫描功能根据螺纹形成原理实现此目的,虽然步骤繁琐但容易理解,同时也可以为大家开拓思路,深刻的理解Pro/E基本功能。
机械手设计汇总
第一章( 第二章绪论 课题研究的目的及意义 随着工业自动化程度的提高,工业现场的很多易燃、易爆等高危及重体力劳动场合必将由机器人所代替。这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产率。例如,目前在我国的许多中小型汽车生产以及轻工业生产中,往往冲压成型这一工序还需要人工上下料,既费时费力,又影响效率。为此,我们把上下料机械手作为我们研究的课题。 工业机械手是工业物流自动化中上网重要装置之一,是当今世界新技术革命的一个重要标志。工业机械手是典型的机电一体化产品。 工业机械手的产生和推广是社会生产和发展的需要,也是现代生产和科技发展的新技术产品。工业机械手已经在工业生产、资源开发、社会服务、排险救灾以及军事技术等方面发挥着愈来愈大的应用。 工业机械手的应用和推广已经并将获得极大的效益。例如在机械制造工业、汽车工业等生产中采用电焊、弧焊、喷漆等机械手,可以大大提高劳动生产率,保证产品质量,改善劳动条件。又如在微电子、医药等生产部门,采用机械手操作,可以消除人对产品的污染、确保产品质量。 机械手可以在有毒、噪音、高温、易燃、易爆等危险有害的环境中代替人长期稳定的工作,从根本上解决了操作者的安全保障问题。因而在这方面应用和推广机器人技术是十分迫切和必要的。 近代工业机械手的原型可以从本世纪40代算起。当时适应核技术的发展需要开发了处理放射性材料的主从机械手。50年代初美国提出了“通用重复操作机器人”的方案,59年研制出第一工业机械手原型。由于历史条件和技术水平关系,在60年代机械手发展较慢。进入70年代后,焊接、喷漆机械手相继在工业中应用和推广。随着计算机技术、控制技术、人工智能的发展、机械手技术得到迅速发展,出现了更为先进的可配视觉、触觉的机器人所应用的机械手。如美国Unimation公司PUMA系列工业机器人相关的机械手,即使由直流伺服驱动、关节式结构、多cpu微机控制、采用专用语言编程的技术先进的机械手。到了80、90年代机器人及相关的机械手开始在工业上普及应用。据统计1980年全世界约有两万台机器人在工业上应用,而到今年增长更快。今年已近开发出
榨汁机食谱自制果蔬汁大全
榨汁机食谱大全一(1-7) 1.*?蜂蜜牛奶果汁(开胃利肠:食欲不振、大便干燥者)原料:蜂蜜1匙、牛奶100克、香蕉1个、苹果半个。 制作:香蕉、苹果去皮去核切成小块,将牛奶、蜂蜜、香蕉、苹果一起放入榨汁机中榨汁即可。 2.*?芒果椰子汁(降暑除烦:夏日不思饮食、心烦难眠者)原料:芒果1个、椰子1个、香蕉1个、蜂蜜半匙、可可仁1匙、牛奶150克。 制作:将芒果、香蕉、可可仁放入榨汁机中榨汁,然后倒入椰子汁、蜂蜜、牛奶即可。 3.*?鲜姜橘子汁(健脾、开胃、除湿:感冒初愈者恢复)原料:橘子2个、鲜姜1块、苹果2个。 制作:将鲜姜、橘子去皮,苹果切成小块,然后一起榨汁即可。 4.*?苹果萝卜汁(富含维生素A、C及果胶) 原料:苹果1个、胡萝卜半个、牛奶150克、蜂蜜少许。制作:将胡萝卜、苹果洗净,苹果去皮去核,然后切成小块放入榨汁机榨汁,再加入牛奶、蜂蜜拌?匀即可。5.*?蔬菜苹果汁(减肥、利胆、提神、养颜) 原料:卷心菜200克、苹果2个、芹菜1棵。 制作:将卷心菜、芹菜梗洗净切碎,苹果切块,然后一起放入榨汁机中榨汁 功效:。 6.* 黄瓜猕猴桃汁/西红柿、柚子(清热解毒、利水止渴)原料:黄瓜200克、猕猴桃50克、凉开水200毫升、蜂蜜两小匙。 做法:黄瓜洗净去籽,留皮切成小块,猕猴桃去皮切块,一起放入榨汁机,加入凉开水搅拌,倒出加入蜂蜜于餐前一小时饮用。 7.*?雪梨香蕉生菜汁(改善晒伤、粗糙的皮肤) 材料:雪梨1个;香蕉1条;生菜100克;柠檬1个 做法:1.雪梨洗净去皮,切成可放入榨汁机内的大小。2.香蕉去皮切成数段。3.生菜洗净,包裹着香蕉。4.柠檬连皮对切为四份,去核。5.将所有材料顺序放入榨汁机内压榨成汁。心得:加入蜂蜜与冰块,可令果汁更冰凉清甜。 榨汁机食谱大全一(8-15) 8.*葡萄柠檬汁(令肌肤嫩滑、面色红润) 材料:葡萄150克;柠檬1个;蜂蜜适量。 做法:将葡萄洗净;柠檬连皮对切为四份;将葡萄、柠檬放入榨汁机内压榨成汁;倒进杯中加入蜂蜜拌匀即成。9.*?芹菜汁(咳嗽、多痰、痔疮、健胃利尿) 材料:芹菜40g~50g、高丽菜80g~100g、柳丁(带皮)30g、胡萝卜与苹果各150g~200g。 做法:芹菜要包在高丽菜内打成汁。 10.*?菠菜柳橙汁(改善恶性贫血、气喘、荨麻疹) 材料:菠菜30g~70g、高丽菜80g~100g、柳橙(带皮)30g~40g、胡萝卜与苹果各150g~200g、菠菜和高丽菜。 做法:菠菜和高丽菜要先切碎才容易打成汁 11.*?高丽菜汁(高血压及血管硬化具有预防及稳定作用)材料:高丽菜200g、胡萝卜200g、苹果200g 做法:高丽菜要先切碎,用榨汁机搾成汁早晚各一杯12..*?姜橘土豆汁(温中健脾,理气止痛)材料:土豆、生姜,鲜橘 做法:将鲜土豆、生姜榨汁加鲜橘汁调匀。 用法:日服30毫升,入杯内,放热水中烫温而饮。 注释---橘汁甘酸性温,健胃、理气、止痛;生姜辛温,温中止呕;土豆性平,和胃调中止痛。 适应症:?神经官能性胃痛、呕吐、恶心等症。 13.*?柠檬苹果汁(适合油性皮肤的美眉) 材料:需要1/2个中等大小的苹果,1/4个柠檬,还可以加上几小块胡萝卜 做法:全部放到榨汁机里。 14.*??菠萝芹菜汁(适合想美白的朋友) 材料:取菠萝1/4个,芹菜1/2段,再加上1/2个西红柿做法:将它们依次放到榨汁机里榨汁 15.*?柑橘卷心菜汁(抵抗力差) 材料:柑橘1个,要剥去外面的硬皮。1/4个中等大小的卷心菜,再加上1根香菜 做法:将它们依次放到榨汁机里榨汁 榨汁机食谱大全一(16-20) 16.*?西红柿柠檬汁 材料:西红柿1个,柠檬1/2个 做法:先将柠檬榨汁待用,再将西红柿榨汁,然后将它们混合,就可以喝了功效:可以保持肌肤红润,有弹性,同时帮助消化17.*?菠萝苦瓜仙女果汁 材料:菠萝1/5个,苦瓜1/2条,仙女果3个 做法:将它们依次榨汁,搅拌后就可以饮用了
搬运机械手设计说明书
机械与装备工程学院 课程设计说明书(2016/2017学年第 1学期) 课程名称:机械设计课程设计 题目:搬运机械手的设计 专业班级:机械设计制造及其自动化学生姓名: 学号: 130200216 指导教师: 设计周数: 2周 设计成绩: 2016年 12月 31日
目录 第一章绪论 (1) 1.1 机械手的应用现状 (1) 1.2 机械手研究的目的、意义 (1) 1.3 设计时要解决的几个问题 (1) 第二章机械手总体方案的设计 (3) 2.1 机械手的系统工作原理及组成 (3) 2.2 机械手的基本结构及工作流程 (3) 第三章机械手的方案设计及其主要参数 (5) 3.1 坐标形式和自由度选择 (5) 3.2 执行机构 (5) 3.3 驱动系统 (6) 3.4 控制系统 (7) 第四章结构设计及优化 (8) 4.1手部夹紧气缸的设计 (8) 4.1.1手部夹紧气缸的设计 (8) 4.1.2 确定气缸直径 (9) 4.1.3 气缸作用力的计算及校核 (9) 4.1.4 缸筒壁厚的设计 (10) 4.1.5 气缸的基本组成部分及工作原理 (10) 4.2手臂结构优化设计 (10) 4.2.1问题描述 (10) 4.2.2设计分析 (10) 4.2.3建立数学模型 (12) 4.2.4优化计算 (13) 4.2.5优化结果分析 (16) 第五章 Adams运动仿真 (17) 总结与展望 (20)
摘要 机械手是近几十年发展起来一种高科技自动化生产设备,它对稳定、提高产品质量、提高生产效率、改善劳动条件和产品的快速更新换代起着十分重要的作用,随着工业机械化和自动化的发展以及气动技术自身的一些优点,气动机械手已经广泛应用在生产自动化的各个行业。 本设计中的搬运机械手的动作由气动缸驱动,气动缸由相应的电磁阀来控制,电磁阀由PLC控制。驱动执行元件完成,能十分方便的嵌入到各类工业生产线中。 本文中对机械手臂运用MATLAB算法进行优化设计,它使得优化过程变得非常简单、容易理解和掌握,从而避免编写各种复杂的运算程序,提高了设计效率。 用 ADAMS 软件建立虚拟样机进行仿真并优化参数,得出了机械手的运动过程的演示动画,发现设计结构能有机地结合在一起,工作平稳,并在指定的速度和负载等参数下得出了所需要的驱动力和结构参数等。虚拟样机代替物理样机对工程机械进行创新设计、测试和评估,可以降低设计成本,缩短开发周期,而且设计质量和效率都可以得到提高。 关键词:机械手,气动,优化设计,仿真
ProE各种曲线及方程
1.碟形弹簧 圓柱坐标 方程:r = 5 theta = t*3600 z =(sin(3.5*theta-90))+24*t 此主题相关图片如下:1.jpg 2.葉形线. 笛卡儿坐標标 方程:a=10 x=3*a*t/(1+(t^3)) y=3*a*(t^2)/(1+(t^3)) 此主题相关图片如下:2.jpg 3.螺旋线(Helical curve) 圆柱坐标(cylindrical)
方程:r=t theta=10+t*(20*360) z=t*3 此主题相关图片如下:3.jpg 4.蝴蝶曲线 球坐标 方程:rho = 8 * t theta = 360 * t * 4 phi = -360 * t * 8
此主题相关图片如下:4.jpg 5.渐开线 采用笛卡尔坐标系 方程:r=1 ang=360*t s=2*pi*r*t x0=s*cos(ang) y0=s*sin(ang) x=x0+s*sin(ang) y=y0-s*cos(ang) z=0 此主题相关图片如下:5.jpg
6.螺旋线. 笛卡儿坐标 方程:x = 4 * cos ( t *(5*360)) y = 4 * sin ( t *(5*360)) z = 10*t 此主题相关图片如下:6.jpg 7.对数曲线 笛卡尔坐标系 方程:z=0 x = 10*t y = log(10*t+0.0001) 此主题相关图片如下:7.jpg
采用球坐标系 方程:rho=4 theta=t*180 phi=t*360*20 此主题相关图片如下:8.jpg 9.双弧外摆线 卡迪尔坐标 方程:l=2.5 b=2.5 x=3*b*cos(t*360)+l*cos(3*t*360) Y=3*b*sin(t*360)+l*sin(3*t*360) 此主题相关图片如下:9.jpg 10.星行线 卡迪尔坐标
四自由度液压搬运机械手设计
四自由度液压搬运机械手设计摘要: 通过对机床工件搬运机械手主要结构和运动形式的探究,以及对机械手的工作过程和控制要求分析,根据机械手动作循环图设计液压系统控制图;并采用欧姆龙控制器系统进行电气部分的软硬件设计,绘制了 PLC 的外部接线图和单循环自动工作状态流程图,将 PLC 技术应用于机械手具有整体技术及经济效益Abstract: The hydraulic system control was designed according to the cycle operation of manipulator,through the study of main structures and movement forms of the manipulator and the analysis on working processes and control requirements of the manipulator. The software and hardware design for the electrical part was done by using the Omron controller system. The external wiring diagram and automatic single cycle working state flow chart of the PLC were drawn. The application of PLC to manipulator would have technological and economic benefits. 关键词:机械手,四自由度,搬运,液压驱动,PLC控制 Key words: manipulator; Four dof handling PLC control hydraulic system 1、结构设计方案 1.1机械手的机械结构 常见的工业机械手根据手臂的动作形态,按坐标形式大致可分为以下4种:(1)直角坐标型机械手;(2)圆柱坐标型机械手;(3)极坐标系机械手;(4)多关节型机械手 1.1.1机构原理 这里的机械手可完成的动作有夹紧工件、手臂转位、松开卸料、手臂复位等基本动作,该机械手可看成是一个由4个自由度构成的机构(各组成部分的定义如图1所示)四自由度分别为基座的旋转、立柱的升降、大臂的伸缩以及小臂的旋转。
螺旋榨汁机设计
摘要 在果蔬的破碎、提取汁液的工艺上,有机械榨取、理化和酶法提取三种方法。但理化和酶法提取因其适应性的局限和副作用的产生而在使用上收到限制。机械式榨取果汁蔬液广泛应用在番茄、菠萝、苹果、柑橘、橙的压榨上。螺旋式连续榨汁机就是机械法榨汁的主要机械与设备之一。螺旋式连续榨汁机是采用压缩体积的方式使果料的固体与液体成分分离,榨取汁液。可以为中型食品企业和餐饮业提供榨汁的需要,是一种常用的食品机械。本设计的螺旋式连续榨汁机介绍了以压缩体积为基础的榨汁机的设计要点、工作原理和设备组成。设计主要通过变螺距变径螺杆,让榨汁机能充分榨出果蔬汁液。它的特点是结构简单,外形尺寸小,榨汁效率高,操作很方便,故在食品工厂广泛使用。 关键词:机械榨取;压榨;螺旋式连续榨汁机;食品机械
Abstract Broken in fruits and vegetables, the juice extraction process, mechanical extract,chemical and enzymatic extraction of three methods. However, because of the physical and chemical and enzymatic extraction adaptability limitations and side effects produced and received restrictions on use. Mechanical liquid vegetable juice extract is widely used in the tomato, pineapple, apple, citrus, orange crush. Continuous spiral juicer is one of the main machinery and equipment mechanical method juice. Screw Continuous juicing machine is used in a way that the volume of compressed fruit material separating solid and liquid components, the extraction of juice. Juicing can provide needed food for medium-sized businesses and restaurants, is a commonly used food machinery. The design of the continuous spiral juicer introduced to compress the volume-based design points juicer, working principle and equipment. Designed primarily by variable pitch screw adjustable, allowing fully functional juice squeezed fruit and vegetable juices fluid. It is characterized by simple structure, small size, high efficiency juice, the operation is very convenient, it is widely used in food factories. Key words:mechanical extract ;press;the spiral continuous juicer ;food machinery
基于PROE的鼠标及其模具设计毕业设计(可编辑)
基于PROE的鼠标及其模具设计毕业设计 本科生毕业论文(设计) 题目: 基于PROE的鼠标及其模具设计 姓名:亓毓阈系别: 工程系 专业: 机械设计制造及其自动化 班级: 本科0班学号:7>2014701247 指导教师: 诸葛孔明完成时间: 2013-6-15 2014年 4 月 15 日 毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名: 日期: 指导教师签名: 日期: 使用授权说明 本人完全了解安阳工学院关于收集、保存、使用毕业设计(论文)的规定,
即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名: 日期: 摘要 Pro/Engineer(以下简称Pro/E)是一款三维建模软件,它是一套由设计至生产的机械自动化软件,是新一代的产品造型系统,利用参数化实体造型的方法,为更加高速、快捷的造型、生产提供了一种切实可行的办法,在工业设计和机械设计等方面有很好的可操作性。Pro/Engineer还提供了目前所能达到的最全面、集成最紧密的产品开发环境。 同时本课题还用到了Expert Moldbase Extension(以下简称EMX), 模具专家系统扩展,它是Pro/E软件的模具设计外挂。它是Pro/e的一个自动分模工具,利用该模具库,家用电器、玩具和汽车零件制造商们将可在模具开发及制造方面有效地控制成本。 本课题《鼠标及其模具设计》就是基于Pro/E的产品开发设计,采用Pro/E 软件对鼠标上盖制品及模具进行了三维造型,采用Pro/E的数值模拟技术和经验设计计算相结合的方法优化设计,同时仿真了塑料熔体在型腔内的充模流动以及冷却分析过程。 关键字:Pro/EEMX鼠标模具
搬运机械手的设计论文(完整版)
摘要 随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运, 可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。 搬运机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,在本设计中,通过对机械手手部结构的设计,臂部结构的设计,以及液压系统的设计,实现四自由度的运动,完成了搬运机械手的系统结构设计。 关键词:搬运机械手;结构设计;液压系统;四自由度
ABSTRACT With the popularization and development of industrial automation, control demand increased year by year, carrying manipulator application also gradually popular, mainly in the automotive, electronics, machinery, food, medicine and other fields of production lines or cargo transport, can be better to save energy and improve the efficiency of transport equipment or products, in order to reduce other handling the limitation and inadequacy, meet the needs of modern economic development. Manipulator is a kind of automatic positioning control and can be programmed to change the multi-function machines, In this design, through the mechanical hand arm structure design, structure design, and the design of the hydraulic system, to achieve four degrees of freedom movement,completed the manipulator system structure design. Key words:manipulator;structure design ;hydraulic system ;four degrees of freedom movement
榨汁机设计
摘要 随着社会的不断发展,食品机械化技术发展到了一个新的水平;随着食品机械化技术的发展和人们生活水平的提高,水果榨汁机的改进成为目前消费者关心的热点问题。本文介绍了榨汁机的研究意义、榨汁机的研究现状,分析了榨汁机的发展前景,详细讲述了水果榨汁机的工作原理。希望设计的水果榨汁机能够更独特地更好地满足消费者的意愿,本着简单、方便、实用为原则一切从消费者的利益出发。而且,该榨汁机祛除了以前榨汁机出汁率低、果汁不清的弊端。单相串激式电动机充分体现了自动化、高效化、小型化、简单化、环保化等特点。 最后,我相信所设计的这台集专业化、智能化,自动化、高效化、小型化、简单化、环保化、安全性为一体的榨汁机能够早日走进消费者的家庭。 【关键词】水果榨汁机、电机选配、壳体设计、榨汁部件设计。
ABSTRACT ABSTRACT Since the continuous development of today's society,food mechanization technology development to a new level; As food mechanization technology development and people living standard rise, the improvement of fruit juicer became a hot issue of consumer concern right now. This paper introduces the research significance of the juicer, juicer, research status, analyzes the prospect of juicer, fruit juicer working principle is described in detail. Hope fruit juicer can design more unique to better meet consumers' willingness to all for the principle of simple, convenient, and practical in the interests of the consumers. Moreover, the juicer before removing the juicer end of juice yield, fruit juice is not clear. Single-phase series motor automatization and high efficiency fully embodies the, miniaturization and simplification, environmental protection, etc. Finally, I believe that can design the machine set professional, intelligent, automation,and high-effectiveness, miniaturization, simplification, environmental protection, security, as one of the juicer can into the consumer's family at an early date Keywords:Fruit juicer The choice of electromotor The design of rind The design of squeeze parts
基于PROE进行减速器的设计及仿真
目录 1 前言 (4) 1.1 减速器的研究发展现状 (4) 1.2 参数化设计必要性与可能性分析 ........................................................ 错误!未定义书签。 1.3 参数化技术的研究进展 ....................................................................... 错误!未定义书签。 1.4 本论文的研究内容............................................................................... 错误!未定义书签。 2 减速器参数化设计及仿真的总体方案和技术路线................................ 错误!未定义书签。 2.1 减速器参数化设计及仿真的总体方案................................................. 错误!未定义书签。 2.1.1 减速器的结构................................................................................... 错误!未定义书签。 2.1.2 基于PRO/E的参数原理.................................................................... 错误!未定义书签。 2.1.3 基于PRO/E的模拟仿真.................................................................... 错误!未定义书签。 2.1.4 减速器参数化设计及仿真的总体方案 ............................................. 错误!未定义书签。 2.2 减速器参数化设计及仿真的技术路线................................................. 错误!未定义书签。 3 减速器齿轮结构的设计 ......................................................................... 错误!未定义书签。 3.1 高速级齿轮设计................................................................................... 错误!未定义书签。 3.1.1 齿轮类型、精度等级、材料及齿数的确定...................................... 错误!未定义书签。 3.1.2 齿面接触强度设计计算.................................................................... 错误!未定义书签。 3.1.3 齿根弯曲强度校核计算.................................................................... 错误!未定义书签。 3.1.4 齿轮模数、齿数设计计算................................................................ 错误!未定义书签。 3.1.5 齿轮几何尺寸计算 ........................................................................... 错误!未定义书签。 3.2 低速级齿轮设计................................................................................... 错误!未定义书签。 3.2.1类型、精度等级、材料及齿数的确定 .............................................. 错误!未定义书签。 3.2.2 齿面接触强度设计计算.................................................................... 错误!未定义书签。 3.2.3 齿根弯曲强度校核计算.................................................................... 错误!未定义书签。 3.2.4 齿轮模数、齿数设计计算................................................................ 错误!未定义书签。 3.2.5 齿轮几何尺寸计算 ........................................................................... 错误!未定义书签。 4 减速器PRO/E参数化设计 ..................................................................... 错误!未定义书签。 4.1 减速器零部件模型库的建立................................................................ 错误!未定义书签。 4.2 齿轮的参数化造型............................................................................... 错误!未定义书签。 5 减速器的装配及其运动仿真.................................................................. 错误!未定义书签。 5.1 减速器装配关系模型库的建立 ............................................................ 错误!未定义书签。 5.2 装配的关键技术................................................................................... 错误!未定义书签。 5.3 装配过程的实现................................................................................... 错误!未定义书签。 5.4 减速器运动仿真................................................................................... 错误!未定义书签。 5.4.1 减速器的运动分析……………………………………………………………………………错误!未定 5.4.2 运动仿真的实现………………………………………………………………………………错误!未定义 6 结论 ....................................................................................................... 错误!未定义书签。 参考文献 ..................................................................................................... 错误!未定义书签。 致谢............................................................................................................. 错误!未定义书签。 附录............................................................................................................. 错误!未定义书签。 附录1:外文原文 ....................................................................................... 错误!未定义书签。 附录2:外文中文翻译................................................................................ 错误!未定义书签。