平差数据录入示例

通过实例来介绍导线、水准、三角高程的数据输入方法。
导线实例
这是一条符合导线的测量数据和简图,A、B、C和D是已知坐标点,2、3和4是待测的控制点。
导线原始数据表
导线图如下:
导线图
在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入
在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D为已
知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。
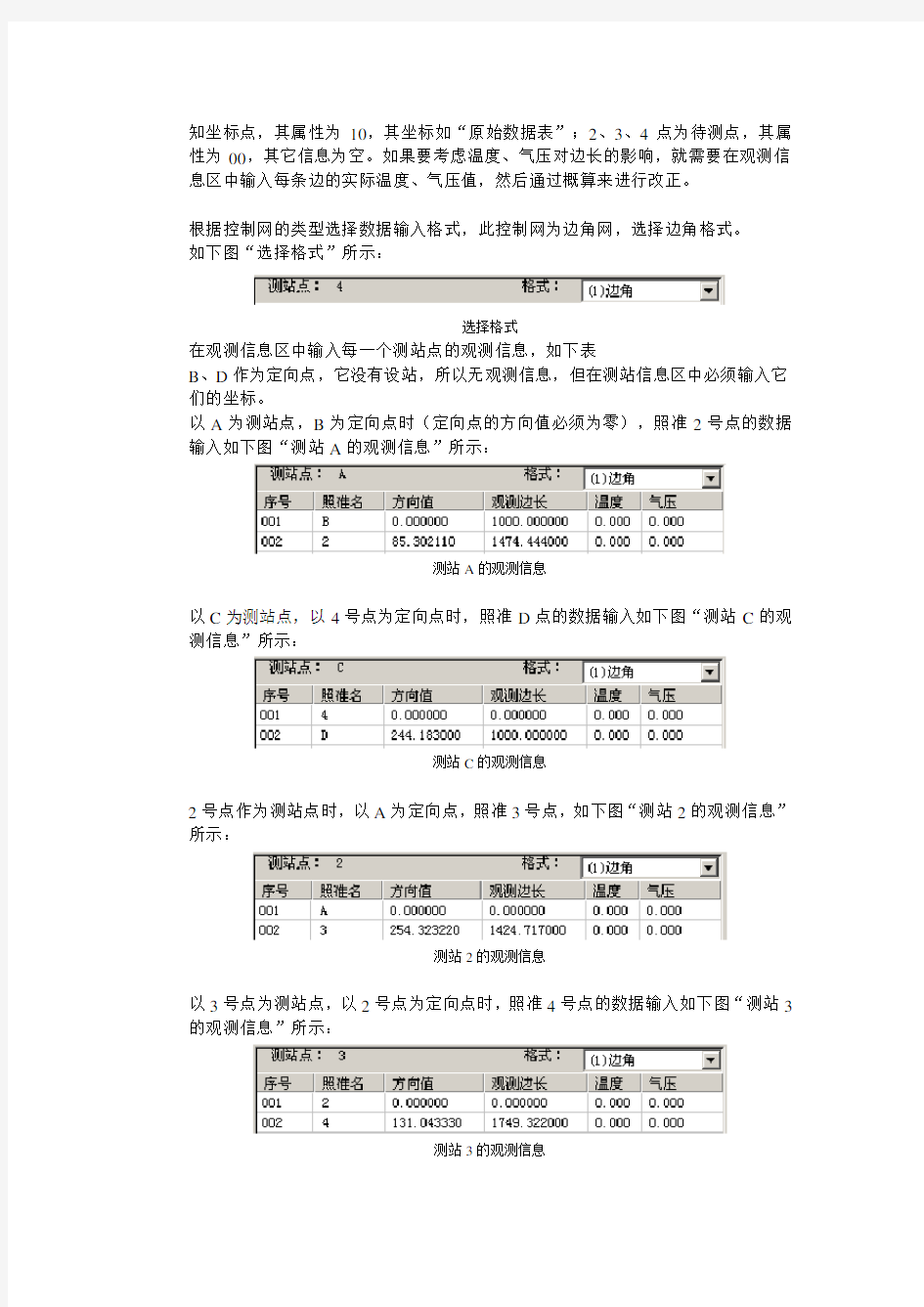
根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。
如下图“选择格式”所示:
选择格式
在观测信息区中输入每一个测站点的观测信息,如下表
B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。
以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A的观测信息”所示:
测站A的观测信息
以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示:
测站C的观测信息
2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示:
测站2的观测信息
以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3的观测信息”所示:
测站3的观测信息
以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息”所示:
测站4的观测信息
说明:①数据为空或前面已输入过时可以不输入(对向观测例外)
②在电子表格中输入数据时,所有零值可以省略不输。
以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件:
[STATION] (测站信息)
B,10,8345.870900,5216.602100
A,10,7396.252000,5530.009000
C,10,4817.605000,9341.482000
D,10,4467.524300,8404.762400
2,00
3,00
4,00
[OBSER] (观测信息)
A,B,,1000.0000
A,2,85.302110,1474.4440
C,4
C,D,244.183000,1000.0000
2,A
2,3,254.323220,1424.7170
3,2
3,4,131.043330,1749.3220
4,3
4,C,272.202020,1950.4120
上面[STATION](测站点)是测站信息区中的数据,[OBSER](照准点)是观测信息区中的数据。
水准实例
这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的高程点。
原始测量数据如下:
水准原始数据表
水准路线图(模拟)
图中h为高差。
在平差易中输入以上数据,如下图“水准数据输入”所示:
水准数据输入
在测站信息区中输入A、B、2、3和4号测站点,其中A、B为已知高程点,其属性为01,其高程如“水准原始数据表”;2、3、4点为待测高程点,其属性为00,其它信息为空。因为没有平面坐标数据,故在平差易软件中没有网图显示。
根据控制网的类型选择数据输入格式,此控制网为水准网,选择水准格式,如下图“选择格式”所示:
选择格式
注意:
1、在“计算方案”中要选择“一般水准”,而不是“三角高程”。
“一般水准”所需要输入的观测数据为:观测边长和高差。
“三角高程”所需要输入的观测数据为:观测边长、垂直角、站标高、仪器高。
2、在一般水准的观测数据中输入了测段高差就必须要输入相对应的观测边长,否则平差计算时该测段的权为零,因此导致计算结果错误。
在观测信息区中输入每一组水准观测数据
测段A点至2号点的观测数据输入(观测边长为平距)如下图“A->2观测数据”所示:
A->2观测数据
测段2号点至3号点的观测数据输入如下图“2->3观测数据”所示:
2->3观测数据
测段3号点至4号点的观测数据输入如下图“3->4观测数据”所示:
3->4观测数据
测段4号点至B点的观测数据输入如下图“4->B观测数据”所示:
4->B观测数据
以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件:
[STATION]
A,01,,,96.062000
B,01,,,88.183000
2,00
3,00
4,00
[OBSER]
A,2,,1474.444000,-50.4400
2,3,,1424.717000,3.2520
3,4,,1749.322000,-0.9080
4,B,,1950.412000,40.2180
三角高程实例
这是三角高程的测量数据和简图,A和B是已知高程点,2、3和4是待测的高程点。
原始测量数据如下图“三角高程原始数据表”所示:
三角高程原始数据表
三角高程路线图(模拟)
上图中r为垂直角
在平差易中输入以上数据,如下图“三角高程数据输入”所示:
三角高程数据输入
在测站信息区中输入A、B、2、3和4号测站点,其中A、B为已知高程点,其属性为01,其高程如“三角高程原始数据表”;2、3、4点为待测高程点,其属性为00,其它信息为空。因为没有平面坐标数据,故在平差易软件中也没有网图显示。
此控制网为三角高程,选择三角高程格式。如下图“选择格式”所示:
选择格式
注意:在“计算方案”中要选择“三角高程”,而不是“一般水准”。
在观测信息区中输入每一个测站的三角高程观测数据
测段A点至2号点的观测数据输入如下图“A->2观测数据”所示:
A->2观测数据
测段2点至3号点的观测数据输入如下图“2->3观测数据”所示:
A->2观测数据
测段3点至4号点的观测数据输入如下图“3->4观测数据”所示:
A->2观测数据
测段4点至B点的观测数据输入如下图“4->B观测数据”所示:
4->B观测数据
以上数据输入完后,点击“文件\另存为”,将输入的数据保存为平差易格式文件为:
[STATION]
A,01,,,96.062000,1.30
B,01,,,95.97160,
2,00,,,,1.30
3,00,,,,1.35
4,00,,,,1.45
[OBSER]
A,2,,1474.444000,27.842040,,1.044000,1.340
2,3,,1424.717000,85.289093,,3.252100,1.350
3,4,,1749.322000,-19.353448,,-0.380800,1.500
4,B,,1950.412000,-93.760085,,-2.452700,1.520
精密导线测量实习报告--五组
. .. . 石铁路院校区基础控制测量 技术设计书 系别:测绘工程系 班级:工1202班 组名:第五组 组长:孟 组员:王颖、瑶瑶、臧阔 、磊 指导老师:周淑波 铁路职业技术学院 2014年6月8日
目录 一、实验项目 (3) 二、实验目的 (3) 三、实验仪器 (3) 四、实验原理和导线测量技术要求 (3) 五、实验容步骤 (5) 六、实验结论 (6) 七、附表 (14) 八、总结 (17)
一、实验项目 精密导线测量的方法及数据处理。 导线——测区相邻控制点连成直线而构成的连续折线(导线边)。 导线测量——在地面上按一定要求选定一系列的点依次相邻,次序连成折线,并测量各线段的边长和转折角,再根据起始数据确定各点平面位置的测量方法。 主要用于带状地区、隐蔽地区、城建去、地下工程、公路、铁路等控制点的测量。导线的布设形式有:符合导线、闭合导线、支导线和导线网,这次布设形式为闭合导线。 二、实验目的 1了解精密导线测量的方法; 2学会精密导线测量的数据处理方法; 3学会使用科傻平差软件。 三、实验仪器 精密导线所需要的仪器有:南方全站仪一台,棱镜两个,记录板一个,三脚架三
个。 四、实验原理和导线测量技术要求 1.导线布设形式,根据测区的大小情况要求,导线可布设成以下三种: 1)闭合导线 2)附合导线 3)支导线 2.城市或工程测量导线测量技术指标 注意: 1.可以角度和边长分别测量,也可同时测量。 2.导线点要保存好,作为下次精密水准的水准点,两次实验的成果构成一个完整的二级导线控制成果。 3.本次实验可选二级导线,以校园I级(一级)导线点为已知点,布设平均边长约为200米的II级(二级)不少于四个,构成闭合或附合导线。
边角三角网平差程序的设计书
边角三角网平差程序设计书 一、课程设计的目的 学生在学习完误差理论与测量平差基础、测量平差程序设计基础等课程的基础上,设计一个完整的测量数据处理程序,培养学生综合应用量数据处理与计算机应用能力,培养学生主动学习,创新设计能力。 二、课程设计的任务和内容 1.课程设计任务: 在两周的时间内应用者Matlab程序设计语言编制一个完整的边角网严密平差程序,要求有简易的界面,数据输入采用文本输入,采用间接平差模型完成平差的基本计算,能够画出控制网图,输出基本的计算结果,并根据设计过程完成设计报告。 程序设计主要内容包括: 系统功能设计 界面设计 流程设计 代码书写 程序调试 三、课程设计阶段 准备阶段 研究设计任务书,分析设计题目,熟悉原始数据,明确设计内容和要求;制定课程设计计划和进度。 熟悉算法模型 阅读误差理论与测量平差基础教材,掌握平面控制网数据处理的数学模型,
这里主要是指方向观测量、角度观测量、边长观测量的观测方程和误差方程的构成,研究平面观测数据的组织方法,设计Matlab算法,实现计算的自动表达。 功能设计阶段设计程序要实现的功能 平差程序的基本功能包括数据的输入,平差计算,精度评定、成果输出等; 4.流程和界面设计阶段 根据平差计算的过程和程序功能,画出流程图,设计简易界面实现数据的输入和平差计算和成果输出。在此基础上,根据功能要求,设计简便的界面。 5.代码书写和调试阶段 按照计算流程图和界面设计,根据方向观测值,边长观测值的误差方程的组成,设计Matlab算法,实现误差方程的自动构成,分阶段书写代码,调试实现各个阶段的功能。 6.设计报告撰写阶段 设计报告是对整个设计过程进行综合总结提高,内容包括课设的目的意义、程序设计的内容、算法设计、设计心得等根据设计过程和对测量数据处理以及程序设计的理解进行独立撰写。 四、组织方式进度安排 以小组为单位,每小组5-6人,分工合作共同完成程序设计任务,时间两周, 进度安 排如下:
测量平差超级试卷含答案汇总
1 / 18 一、填空题(每空1分,共20分) 1、测量平差就是在 多余观测 基础上,依据 一定的 原则,对观测值进行合理的调整,即分别给以适当的 改正数 ,使矛盾消除,从而得到一组最可靠的结果,并进行 精度评估 。 2、条件平差中,条件方程式的选取要求满足 、 。 3已知条件平差的法方程为02432 24 21=?? ? ???+??????????? ?k k ,则PV V T = ,μ= , 1k p = ,2 k p = 。 4、已知某平差问题,观测值个数为79,必 要观测量个数为35,则按条件平差进行求解时,条件方程式个数为 ,法方程式个数为 。 5、已知某平差问题观测值个数为50,必要观测量个数为22,若选6个独立参数按具有参数的条件平差进行求解,则函数模型个数为 ,联系数法方程式的个数为 ;若在22个独立参数的基础上,又选了4个非独立参数按具有条件的参数平差进行求解,则函数模型个数为 ,联系数法方程式的个数为 。 6、间接平差中误差方程的个数等于
2 / 18 ________________,所选参数的个数等于_______________。 7、已知真误差向量1 ??n 及其权阵P ,则单位权中误差公式为 ,当权阵P 为 此公式变为中误差公式。 二、选择题(每题2分,共20分) 1、观测条件是指: A)产生观测误差的几个主要因素:仪器,观测者,外界条件等的综合 B)测量时的几个基本操作:仪器的对中,整平,照准,度盘配置,读数等要素的综合 C)测量时的外界环境:温度,湿度,气压,大气折光……等因素的综合. D)观测时的天气状况与观测点地理状 况诸因素的综合 答:_____ 2、已知观测向量() L L L T =1 2的协方差阵 为D L =--?? ? ? ? 3112,若有观测值函数Y 1=2L 1, Y 2=L 1+L 2,则σy y 12 等于? (A)1/4 (B)2
水准网按条件平差算例
在图 表9-1 试求: (1)1P 、2P 及3P 点高程之最或然值; (2)1P 、2P 点间平差后高差的中误差。 解:(1)列条件方程式,不符值以“mm ”为单位。 已知3,7==t n ,故437=-=r ,其条件方程式为 ??? ? ???=--+=-+--=-+--=++-01030707742643765521v v v v v v v v v v v v (2)列函数式: 555v h x F +== 故 15=f 0764321======f f f f f f (3)组成法方程式。 1)令每公里观测高差的权为1,按1/i i s p =,将条件方程系数及其与权倒数之乘积填于表9-2中。 2)由表9-2数字计算法方程系数,并组成法方程式:
????????????----------5221251021411013????????????d c b a k k k k +????? ???????---1377=0 表9-2 条件方程系数表 (4)法方程式的解算。 1)解算法方程式在表9-3中进行。 2)[]pvv 计算之检核。 [][]wk pvv -= []467.35=-wk 由表9-3中解得[]47.35-=pvv ,两者完全一致,证明表中解算无误。 (5)计算观测值改正数及平差值见表9-4。 (6)计算321,,P P P 点高程最或然值。 359.3611=+=x H H A P m 012.3722=+=x H H A P m
表9-4 改正数与平差值计算表 (7)精度评定。 1)单位权(每公里观测高差)中误差 2)21,P P 点间平差后高差中误差 mm 0.34 47.35±=±=μmm P m F F 2.252.00.31 ±=±=±=μ
科傻GPS平差软件说明书
科傻系统(COSA)系列软件GPS工程测量网 通用平差软件包(CosaGPS V5.1) 使用说明书 2007年11月
所有不得翻录Tel: Email: https://www.wendangku.net/doc/356109802.html, https://www.wendangku.net/doc/356109802.html,
目录 目录 (1) 1.简介 (3) 1.1 功能全面 (3) 1.2 整体性好 (3) 1.3 解算容量大,运算速度快 (3) 1.4 操作简明,使用方便 (4) 2.“文件”下拉菜单 (6) 2.1 工程与文件 (6) 2.2 “文件”菜单项 (8) 2.2.1新建 (8) 2.2.2打开 (9) 2.2.3关闭 (9) 2.2.4保存 (9) 2.2.5另存为 (9) 2.2.6新建工程 (9) 2.2.7 打开工程 (15) 2.2.8 打印 (16) 2.2.9 打印预览 (16) 2.2.10 打印设置 (16) 2.2.11 退出 (16) 3.“GPS数据处理”下拉菜单 (17) 3.1 已知数据 (17) 3.1.1 三维已知坐标 (18) 3.1.2 二维已知坐标 (19) 3.1.3 一维高程点 (19) 3.1.4 输入地面边长 (19) 3.1.5 输入地面方位 (20) 3.2 基线数据 (20) 3.3 GPS三维向量网平差(无约束平差或约束平差) (21) 3.4 二维网联合/约束平差 (22) 3.4.1 联合/约束平差 (22)
3.4.2 输出用户自定义任意两点相对精度 (23) 3.5 椭球面上三维平差 (23) 3.6 工程网(一点一方向)平差 (24) 3.7 GPS高程拟合 (25) 3.8 GPS三维秩亏自由网平差 (26) 3.9 稳定性分析 (27) 3.10 设置 (28) 4.“查看”下拉菜单 (28) 5.“工具”下拉菜单 (29) 5.1 闭合差计算 (30) 5.2 重复基线差 (30) 5.3 网图显绘 (31) 5.4 贯通误差影响值计算 (31) 5.5 GPS网设计 (32) 5.6 输出AutoCAD格式的GPS网图 (33) 6.“坐标转换”下拉菜单 (34) 6.1 XYZ-〉BLH (34) 6.2 BLH->XYZ (35) 6.3 BL->XY (36) 6.4 XY->BL (36) 6.5 XY1->XY2 (37) 6.6 XYZ1->XYZ2 (39) 6.7 高程面坐标变换 (41) 7.“帮助”下拉菜单 (42) 附录1. 功能菜单框图 (43) 附录2. 算例及说明 (44) 附录3. 基线解文件格式说明 (46) 附录4. 方向及经纬度的角度格式说明 (54) 附录5. 简要操作步骤 (55)
三角网条件平差计算
§3-4 三角网条件平差计算 2学时 三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。三角网按条件平差计算时,首要的问题是列出条件方程。因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。 三角网的种类比较多,网的布设形式也比较复杂。根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。 在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。 一、网中条件方程的个数 三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。 要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数: r = n - t 由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。因此,问题的关键是判定必要观测数t。
《误差理论与测量平差基础》试卷A(答案)
《误差理论与测量平差基础》试卷A(答案)
《误差理论与测量平差基础》期末考试试题A(参考答案) 一、名词解释(每题2分,共10分) 1、偶然误差 ——在相同的观测条件系作一系列的观测,如果误差在大小和符号上都表现出偶然性。即从单个误差看,该误差的大小和符号没有规律性,但就大量误差的总体而言,具有一定的统计规律。这种误差称为偶然误差。 2、函数模型线性化 ——在各种平差模型中,所列出的条件方程或观测方程,有的是线性形式,有的是非线性形式。在进行平差计算时,必须首先把非线性形式的函数方程按台劳公式展开,取至一次项,转换成线性方程。这一转换过程,称之为函数模型的线性化。 3、点位误差椭圆 ——以点位差的极大值方向为横轴X 轴方向,以位差的极值F E 、分别为椭圆的长、短半轴,这样形成的一条椭圆曲线,即为点位误差椭圆。 4、协方差传播律 ——用来阐述观测值的函数的中误差与观测值的中误差之间的运算规律的数学公式。如0 K KL Z +=, 若观测向量的协方差阵为LL D ,则按协方差传播律, 应有T LL ZZ K KD D =。 5、权
——表示各观测值方差之间比例关系的数字特征, 2 20 i i P σσ=。 二、判断正误(只判断)(每题1分,共10分) 参考答案:X √X √X X X √√X 三、选择题(每题3分,共15分) 参考答案:CCDCC 四.填空题(每空3分,共15分) 参考答案:1. 6个 2. 13个 3.1/n 4. 0.4 5. ) () () () (432 2 0=''+?+?+-''+ -''- W y S X X x S Y Y C AC A C C AC A C ρρ,其中 AB A C A C X X Y Y W αββ-++--=''4300arctan 五、问答题(每题4分,共12分) 1. 几何模型的必要元素与什么有关?必要元素数就是必要观测数吗?为什么? 答:⑴几何模型的必要元素与决定该模型的内在几何规律有关;(1分) ⑵必要元素数就是必要观测数;(1分) ⑶几何模型的内在规律决定了要确定该模型,所必须具备的几何要素,称为必要元素,必要元素的个数,称为必要元素数。实际工程中为了确定该几何模型,所必须观测的要素个数,称为必要观测数,其类型是由必要元素所决定的,其数量,必须等于必要元素的个数。(2分) 2. 简述偶然误差的特性 答:⑴在一定条件下,误差绝对值有一定限值。或者说,
coswin说明书平差软件定稿版
c o s w i n说明书平差软 件 HUA system office room 【HUA16H-
前言 “地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”(简称科傻系统)将测量基本原理和现代科技相结合,对电子全站仪、电子水准仪以及常规地面测量仪器进行系统的开发,以地面控制测量、施工测量和碎部测量等测量工程为对象,实现从外业数据采集、质量检核、预处理到内业数据处理、成果报表输出的一体化和自动化作业流程。 该系统由两个子系统组成:“基于掌上型电脑的测量数据采集和处理系统”(简称COSA-HC),在掌上型电脑RD-EB2上运行,能自动控制和引导整个作业过程并进行质量检测,一体化程度高,操作方便。该子系统具有水准测量、二、三维控制、碎部测量、道路测设、工程放样等测量作业模块;具
有小规模水准网、二、三维工程网的平差功能;具有文件管理和数据通信功能;该系统灵活方便,适合外业环境。 “地面测量工程控制测量数据处理通用软件包”(简称CODAPS或COSAWIN)在微机WINDOWS环境下运行即可独立使用,也可与COSA-HC联合使用,对RD-EB2传输过来的原始观测数据进行转换,完成从概算到平差的数据自动化处理,同时具有粗差探测与剔除、方差分量估计、闭合差计算、贯通误差影响值估算、报表打印、网图显绘、坐标转换与换带计算、控制网优化设计以及叠置分析等功能。 本手册是为COSAWIN用户专门编写的,若有疏漏和不当之处,敬请读者提出宝贵意见和批评指正。 武汉测绘科技大学武地课题组
2000.5.
第一章概述 1.1 系统简介 科傻系统(COSA)是“地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”的简称,包括COSAWIN和COSA-HC两个子系统。COSAWIN在IBM兼容机上运行。 COSAWIN系统除具有概算、平差、精度评定及成果输出等功能外,还提供了许多实用的功能,如网图
固原至王洼铁路复测报告
新建铁路原州区至王洼(起点至程儿山隧道出口段) 控制网复测报告 甘肃铁道综合工程勘察院有限公司 二〇一五年一月兰州
新建铁路原州区至王洼(起点至程儿山隧道出口段) 控制网复测报告 编写: 复核: 审批: 甘肃铁道综合工程勘察院有限公司 二〇一五年一月
目录 1.控制网概况 (1) 2.复测依据 (1) 3. 复测工作内容 (1) 4.复测工作开展 (1) 4.1投入测量仪器 (1) 4.2投入测量人员 (2) 5.平面坐标和高程系统 (2) 5.1控制网复测 (2) 5.2控制网复测实施 (2) 6. GPS内业处理 (4) 7. 控制网复测成果分析及结论 (6) 7.1 控制网复测成果判别方法 (6) 7.2 相邻点间坐标差之差的相对精度统计 (6) 7.3复测与原测坐标成果比较 (8) 7.4平面控制网复测结论 (10) 8. 高程控制网复测 (10) 8.1四等水准测量主要技术要求 (10) 8.2四等水准测量外业测量 (11) 8.3四等水准复测与原成果比较分析 (11) 9.完成复测工作量 (12) 10.附件报告 (12) 10.1 控制点成果表 (13) 10.2 GPS 二维网平差报告 (14) 10.3高程平差报告 (23) 11.测量仪器鉴定证书 (25)
新建铁路原州区至王洼(起点至程儿山隧道段)[控制网复测报告] 新建铁路原州区至王洼 (起点~程儿山隧道出口) 控制网复测报告 1.控制网概况 原州区至王洼铁路控制网的布设由设计单位按分级布网的原则,分别布设四等GPS平面网和四等水准高程网,前期主要复测起点至程儿山隧道控制网,并对程儿山隧道进出口及斜井布设的加密点进行了联测。 2.复测依据 (1)《铁路工程测量规范》(TB10101-2009); (2)《国家三、四等水准测量规范》(GB/T12898-2009); (3)《铁路工程卫星定位测量规范》(TB10054-2010); (4)《全球定位系统(GPS)测量规范》(GB/T 18314-2009); (5)《新建铁路固原至王洼专用线控制测量成果书》(铁一院2010.5)。 3. 复测工作内容 本次共复测GPS平面点11个,GPS加密点共5个,联测国家三角点2个,四等水准高程点共13个。为保证路线的整体贯通及达到设计规范要求精度以及铁路线上工程线形顺畅,对原有GPS点及加密点进行复测,对破坏的GPS点根据现场需要进行恢复,恢复GPS点4个,分别是XGPS03、XGPS04、XGPS5-1、XGPS08;恢复四等水准点1个,为XBM02。GPS平面点按铁路四等GPS网精度标准执行。高程控制网按《国家三、四等水准测量规范》四等水准测量的精度标准执行。 4.复测工作开展 4.1投入测量仪器 序号设备名称型号数量(台) 检定情况 1 GPS 天宝5800 10 已检定 2 全站仪徕卡 TS30 1 已检定 3 水准仪徕卡 DNA03 4 已检定 以上测量仪器均经检定中心鉴定合格,并在有效期内,可用于相应等级精度要求的测量工作。 1
最新《测量平差》重要试卷及答案
《误差理论与测量平差》试卷(D )卷 考试时间:100分钟考试方式:闭卷 题号-一- -二二二四五六总分得分 阅卷人 、填空题(共20分,每空2 分) 1、观测误差产生的原因为:仪器、外界环境、观测者 2、已知一水准网如下图,其中A、B为已知点,观测了8段高差,若设E点高程的平差值与B E之间高差的平差值为未知参数)?1>刃2,按附有限制条件的条件平差法(概括平差法)进 行平差时,必要观测个数为_4 _________ ,多余观测个数为_4 ________ ,一般条件方程个数为 5 ______ ,限制条件方程个数为_ 1 __________ 3、取一长度为d的直线之丈量结果的权为1,则长度为D的直线之丈量结果的权为 d/D _______ ,若长度为D的直线丈量了n次,则其算术平均值的权为_______ nd/D ______ 。 2 4、已知某点(X、Y)的协方差阵如下,其相关系数p XY=0.6________ ,其点位方差为CT 1.25 mm
9.25 0.30 D XX = 030 1.00 ? 二、设对某量分别进行等精度了 n 、m 次独立观测,分别得到观测值 L i , (\ = 1,2- n), L i , (i =1,2,…m),权为 P i = p ,试求: 1)n 次观测的加权平均值 Xn = 的权p n [p] 解:因为p i =p x -用] X n 1 Pl_1 pl_2 pL n [p] np =-L 1 L n n —1 1 …1 r (L 1 L 2 …Ln T n 根据协因数传播定律,则 X n 的权p n : ■v 1 1 J ——=—(1 1 …1 )* % + *1 1 a 1 P m m m ■' mp 兀」 订丿 贝U : p n 二 np 2)m 次观测的加权平均值 x m = 的权p m [p]
三角网坐标平差
三角网坐标平差 时间:2009-12-27 来源:本站作者:节选 §12.1三角网坐标平差 第十二章概述 间接平差又称参数平差。水平控制网按间接平差时,通常选取待定点的坐标平差值作为未知数(按方向平差时,还增加测站定向角未知数),平差后直接求得各待定点的坐标平差值,故这种以待定点坐标作为未知数的间接平差法也称为坐标平差法。参加平差的量可以是网中的直接观测量,例如方向、边长等;也可以是直接观测量的函数,例如角度等。由于三角网的水平角一般是采用方向观测法观测,并由相邻方向相减而得,故它们是相关观测值。此时,若不顾及函数间的相关性,平差结果将受到一定的曲解。因此,坐标平差法都按方向平差。 间接平差的函数模型是误差方程,它是表达观测量与未知数之间关系的方程式。一般工程测量平面控制网的观测对象主要是方向(或角度)和相邻点间的距离(即边长)因此坐标平差时主要列立各观测方向及观测边长的误差方程式,再按照间接平差法的原理和步骤,由误差方程和观测值的权组成未知数法方程去解算待定点坐标平差值,并进行精度评定。 本章主要研究(测)方向网、测边网以及测边测角网的严密坐标平差。 水平控制网按坐标平差法进行平差时,为降低法方程的阶数以便于解算,定向角未知数可采用一定的法则予以消掉。由于误差方程式的组成简单且有规律,便于由程序实现全部计算,因此,在近代测量平差实践中,控制网按间接平差法得到了广泛的应用。平面控制网按坐标平差时,网中每一观测值都应列立一个误差方程式。 为便于计算,通常总是将观测值改正数表示为对应待定点坐标近似值改正数的线性式。坐标平差的第一步是列组误差方程式。对于方向网而言,参与平差的观测值是未定向的方向,选定的未知数是待定点的纵、横坐标值。误差方程式就是方向观测值改正数表达为待定点纵横坐标值的函数式,可以通过坐标方位角来建立方向值与未知数之间的联系。 12.1.1方向误差方程式的建立和组成 在测站k上观测了等方向 其方向观测值为
误差理论与测量平差基础试卷
长沙理工大学考试试卷 …………………………………………………………………………………………………………………………… 试卷编号 1 拟题教研室(或教师)签名 范志勇 系主任签名 …………………………………………………………………………………………………………………………… 课程名称(含档次) 误差理论与测量平差基础 课程代号 0809021 专 业 测绘工程 层次(本、专) 本 考试方式(开、闭卷) 闭 一、 正误判断(正确“T ”,错误“F ”每题1分,共10 分)。 1.已知两段距离的长度及中误差分别为128.286m ±4.5cm 与218.268m ±4.5cm ,则其真误差与精度均相同( )。 2.如果X 与Y 的协方差0xy σ=,则其不相关( )。 3.水准测量中,按公式i i c p s = (i s 为水准路线长)来定权,要求每公里高差精度相同( )。 4.可用误差椭圆来确定待定点与待定点之间的某些精度指标( )。 5.在某一平差问题中,观测数为n ,必要观测数为t ,参数个数u <t 且不独立,则该平差问题可采用附有参数的条件平差的函数模型。( )。 6.由于同一平差问题采用不同的平差方法得到的结果不同,因此为了得到最佳平差结果,必须谨慎选择平差方法( )。 7.根据公式() 222220 cos sin 0360E F θσθθθ=+≤≤得到的曲线就是误差椭圆( )。 8.对于特定的平面控制网,如果按间接平差法解算,则误差方程的个数是一定的( )。 9.对于同一个观测值来说,若选定一定权常数0σ,则权愈小,其方差愈小,其精度愈高( )。 10.设观测值向量,1 n L 彼此不独立,其权为() 1,2 ,,i P i n = ,12(,,,)n Z f L L L = ,则有 2 221122111 1Z n n f f f P L P L P L P ?????????=+++ ? ? ?????????? ( )。 二、填空题(每空2分,共24分)。 1、设对某三角网进行同精度观测,得三角形角度闭合差分别为:3秒,-3秒,2秒,4秒,-2秒,-1秒,0秒,-4秒,3秒,-2秒,则测角中误差为 秒。 2、某平差问题函数模型)(I Q =为?? ?????=-=--=+-+=--0?0306051 54431 2 1x v v v v v v v v ,则该函数模型为 平差方法的模型;=n ,=t ,=r ,=c ,=u 。
平差易软件数据输入实例
导线实例 这就是一条符合导线的测量数据与简图,A、B、C与D就是已知坐标点,2、3与4就是待测的控制点。 测站点角度(°′″) 距离(米) X (米) Y(米) B 8345、8709 5216、6021 A 85、30211 1474、4440 7396、2520 5530、0090 2 254、32322 1424、7170 3 131、04333 1749、3220 4 272、20202 1950、4120 C 244、18300 4817、6050 9341、4820 D 4467、5243 8404、7624 导线原始数据表 导线图如下: 导线图 在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入 在测站信息区中输入A、B、C、D、2、3与4号测站点,其中A、B、C、D为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。 如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A的观测信息”所示: 测站A的观测信息 以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示: 测站C的观测信息 2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示: 测站2的观测信息 以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3的观测信息”所示: 测站3的观测信息 以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息”所示:
COSA(科傻)-CODAPS软件说明包教学版
科傻系统系列软件之二 (CODAPS 2003) 地面测量工程控制测量数据处理通用软件包 Version 5.0 武地课题组 2003.1.武汉
前言 (1) 第一章概述 (3) 1.1 系统简介 (3) 1.2 安装及运行 (3) 1.3 快速入门 (5) 第二章平差 (10) 2.1 控制网观测值文件 (10) 2.2 控制网平差 (20) 2.3 设置与选项 (23) 2.4 生成概算用文件 (32) 2.5 附加信息文件 (33) 第三章工具 (34) 3.1 平面闭合差计算 (34) 3.2 高程闭合差计算 (36) 3.3贯通误差影响值计算 (36) 3.4图形显绘 (38) 3.5斜距化平 (38) 3.6手簿通讯 (40) 3.7格式转换 (41) 3.8叠置分析 (41) 第四章粗差探测、剔除和方差分量估计 (43) 4.1粗差探测与剔除 (43)
4.2方差分量估计 (48) 第五章网的模拟计算和优化设计 (50) 5.1生成正态标准随机数 (50) 5.2网的模拟计算 (50) 5.3平面网优化设计 (58) 第六章报表输出 (60) 6.1原始数据报表 (60) 6.2 平差结果报表 (67) 第七章坐标转换 (70) 7.1 XYZ-〉BLH (70) 7.2 BLH->XYZ (71) 7.3 XY->BL (72) 7.4 BL->XY (73) 7.5 XY1->XY2 (73) 7.6 XY1->XY2 (74) 附录2 CODAPS的文件组织 (76) 1平面控制网 (76) 2 水准(高程)网 (77) 3 GPS网 (78) 附录3 所附实例文件目录 (80) 附录4 有关参考文献 (83) 附录5 有关获奖情况 (87)
测量平差 条件方程t的判定知识分享
测量平差条件方程t的判定
§3-4 三角网条件平差计算 2学时 三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。三角网按条件平差计算时,首要的问题是列出条件方程。因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。 三角网的种类比较多,网的布设形式也比较复杂。根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。 在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。 一、网中条件方程的个数
三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。如 图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网 中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、 一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小 及其方位,就可以计算三角网中未知点的坐标。 要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观 测数t,从而确定了多余观测数: r = n - t 由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测 数,也就确定出了条件方程的个数。因此,问题的关键是判定必要观测数t。 1.网中有2个或2个以上已知点的情况 三角网中有2个或2 个以上已知三角点,就一定具备了4个必要起算数 据。无论是测角网、测边网还是边角同测网,如果有2个已知点相邻,要确定 一个未知点的坐标,需要观测两个观测值(2个角,或者1条边和1个角,或者2条边)。也就是说,确定1个未知点要有2个必要观测值;那么如果网中有p 个未知点,必要观测数应等于未知点个数的两倍。 t = 2 ·p(3-4-1) (1) 测角网 图3-9所示,三角网中有2个已知点,待定点个数为p = 6。如果三角网中观测量全部是角度时。 总观测值个数:n = 23 必要观测数:t = 2 · p =12
cosawin98说明书(平差软件)
前言 “地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”(简称科傻系统)将测量基本原理和现代科技相结合,对电子全站仪、电子水准仪以及常规地面测量仪器进行系统的开发,以地面控制测量、施工测量和碎部测量等测量工程为对象,实现从外业数据采集、质量检核、预处理到内业数据处理、成果报表输出的一体化和自动化作业流程。 该系统由两个子系统组成:“基于掌上型电脑的测量数据采集和处理系统”(简称COSA-HC),在掌上型电脑RD-EB2上运行,能自动控制和引导整个作业过程并进行质量检测,一体化程度高,操作方便。该子系统具有水准测量、二、三维控制、碎部测量、道路测设、工程放样等测量作业模块;具有小规模水准网、二、三维工程网的平差功能;具有文件管理和数据通信功能;该系统灵活方便,适合外业环境。 “地面测量工程控制测量数据处理通用软件包”(简称CODAPS或COSAWIN)在微机WINDOWS环境下运行即可独立使用,也可与COSA-HC 联合使用,对RD-EB2传输过来的原始观测数据进行转换,完成从概算到平差的数据自动化处理,同时具有粗差探测与剔除、方差分量估计、闭合差计算、贯通误差影响值估算、报表打印、网图显绘、坐标转换与换带计算、控制网优化设计以及叠置分析等功能。 本手册是为COSAWIN用户专门编写的,若有疏漏和不当之处,敬请读者提出宝贵意见和批评指正。 武汉测绘科技大学武地课题组 2000.5.
第一章概述 1.1 系统简介 科傻系统(COSA)是“地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”的简称,包括COSAWIN和COSA-HC两个子系统。COSAWIN在IBM兼容机上运行。 COSAWIN系统除具有概算、平差、精度评定及成果输出等功能外,还提供了许多实用的功能,如网图显绘、粗差剔除、方差分量估计、贯通误差影响值计算及闭合差计算等。 该系统不同于其它现有控制网平差系统的最大特点是自动化程度高,通用性强,处理速度快,解算容量大。其自动化表现在通过和COSA子系统COSA-HC相配合,可以做到由外业数据采集、检查到内业概算、平差和成果报表输出的自动化数据处理流程;其通用性表现在对控制网的网形、等级和网点编号没有任何限制,可以处理任意结构的水准网和平面网,无须给出冗余的附加信息;其解算速度快,解算容量大表现在采用稀疏矩阵压缩存储、网点优化排序和虚拟内存等技术,在主频166MHZ的586微机上,解算500个点的平面和水准控制网不到1分钟;在具有20MB剩余硬盘空间的微机上,可以解算多 2
《误差理论与测量平差基础》试卷A(答案)
《误差理论与测量平差基础》期末考试试题A(参考答案) 一、名词解释(每题2分,共10分) 1、偶然误差 ——在相同得观测条件系作一系列得观测,如果误差在大小与符号上都表现出偶然性。即从单个误差瞧,该误差得大小与符号没有规律性,但就大量误差得总体而言,具有一定得统计规律。这种误差称为偶然误差。 2、函数模型线性化 ——在各种平差模型中,所列出得条件方程或观测方程,有得就是线性形式,有得就是非线性形式。在进行平差计算时,必须首先把非线性形式得函数方程按台劳公式展开,取至一次项,转换成线性方程。这一转换过程,称之为函数模型得线性化。 3、点位误差椭圆 ——以点位差得极大值方向为横轴X 轴方向,以位差得极值F E 、分别为椭圆得长、短半轴,这样形成得一条椭圆曲线,即为点位误差椭圆。 4、协方差传播律 ——用来阐述观测值得函数得中误差与观测值得中误差之间得运算规律得数学公式。如 0K KL Z +=,若观测向量得协方差阵为LL D ,则按协方差传播律,应有T LL ZZ K KD D =。 5、权 ——表示各观测值方差之间比例关系得数字特征,220 i i P σσ=。 二、判断正误(只判断)(每题1分,共10分) 参考答案:X √X √X X X √√X 三、选择题(每题3分,共15分) 参考答案:CCDCC 四.填空题(每空3分,共15分) 参考答案:1、 6个 2、 13个 3、1/n 4、 0、4 5、 0) () () () (432 2 00=''+?+?+-''+ -''- W y S X X x S Y Y C AC A C C AC A C ρρ,其中 AB A C A C X X Y Y W αββ-++--=''4300arctan 五、问答题(每题4分,共12分) 1、 几何模型得必要元素与什么有关?必要元素数就就是必要观测数吗?为什么? 答:⑴几何模型得必要元素与决定该模型得内在几何规律有关;(1分) ⑵必要元素数就就是必要观测数;(1分) ⑶几何模型得内在规律决定了要确定该模型,所必须具备得几何要素,称为必要元素,必要元素得个数,称为必要元素数。实际工程中为了确定该几何模型,所必须观测得要素个数,称为必要观测数,其类型就是
测绘程序设计实验八水准网平差程序设计报告完整版
测绘程序设计实验八水准网平差程序设计报告 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
《测绘程序设计》上机实验报告 (Visual C++.Net) 班级:测绘0901班 学号: 04 姓名:代娅琴 2012年4月29日
实验八平差程序设计基础 一、实验目的 巩固过程的定义与调用 巩固类的创建与使用 巩固间接平差模型及平差计算 掌握平差程序设计的基本技巧与步骤 二、实验内容 水准网平差程序设计。设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。 1.水准网间接平差模型: 2.计算示例:
近似高程计算: 3.水准网平差计算一般步骤 (1)读取观测数据和已知数据; (2)计算未知点高程近似值; (3)列高差观测值误差方程; (4)根据水准路线长度计算高差观测值的权; (5)组成法方程; (6)解法方程,求得未知点高程改正数及平差后高程值; (7)求高差观测值残差及平差后高差观测值; (8)精度评定; (9)输出平差结果。 4.水准网高程近似值计算算法
5.输入数据格式示例 实验代码: #pragma once class LevelControlPoint { public: LevelControlPoint(void); ~LevelControlPoint(void);
public: CString strName;trName=pstrData[0]; m_pKnownPoint[i].strID=pstrData[0]; m_pKnownPoint[i].H=_tstof(pstrData[1]); m_pKnownPoint[i].flag=1;trName=pstrData[i]; m_pUnknownPoint[i].strID=pstrData[i]; m_pUnknownPoint[i].H=0;lag=0;pBackObj=SearchPointUsingID(pstrData[0]);pFrontObj=Sea rchPointUsingID(pstrData[1]);ObsValue=_tstof(pstrData[2]);ist=_tstof(pstrData[3]);trID==ID) {return &m_pKnownPoint[i];} } return NULL; } trID==ID) {return &m_pUnknownPoint[i];} } return NULL; } LevelControlPoint* AdjustLevel::SearchPointUsingID(CString ID) { LevelControlPoint* cp; cp=SearchKnownPointUsingID(ID); if(cp==NULL) cp=SearchUnknownPointUsingID(ID); return cp; } void AdjustLevel::ApproHeignt(void)lag!=1) { pFrontObj->strID==m_pUnknownPoint[i].strID) && m_pDhObs[j].cpBackObj->flag==1 ) { =m_pDhObs[i].cpBackObj->H - m_pDhObs[i].ObsValue;*/ m_pUnknownPoint[i].H=m_pDhObs[j].cpBackObj->H + m_pDhObs[j].HObsValue; m_pUnknownPoint[i].flag=1; break; } } if(m_pUnknownPoint[i].flag!=1)pBackObj- >strID==m_pUnknownPoint[i].strID) && m_pDhObs[j].cpFrontObj->flag==1 ) { =m_pDhObs[j].cpFrontObj->H-m_pDhObs[j].HObsValue;
一级导线指导书
一级导线指导书 1、概况 京石高速铁路客运专线已经于2006年2月通过了国家发改委审批,建设总工期4年,预计2012年全线通车。设有六个站,北京西—涿州—徐水—保定—定州—石家庄东。设计时速350公里/小时。全长281 公里。本单位承包工程量8公里。 1、本工程收集到国家GPS点4个点作为本工程平面控制起算点。 2、本工程收集到Ⅲ等水准点15个,系珠基高程系成果,作为本工程高程控制起算点。 2、控制点交接桩概述 2.1地形踏勘 2.2控制桩情况:1完好控制桩占90%,2丟损控制桩占4%,松动控制桩占6% 3、作业队伍情况 为确保本次复测的准确性和高效性,我院派出精兵强将,由项目长亲自挂帅,由较强作业能力的工程技术人员5名,辅助技术员4名组成复测小组,从事复测工作;由10名技术人员进行地形测量工作,工程处长带队,工程师1名,技术员3名,技术熟练的辅助工12名从事外业测量和内业整理工作。 此次作业于2006年8月进驻测区,共投入人员68人,全站仪6台,汽车3部,计算机8台,绘图仪1台。2004开思软件8套。
4、仪器设备 全站仪:Leica (徕卡),角度测量精确度±2″,距离测量精确度±2mm +2ppm(已检核),基座(经检核所有基座都满足要求),气象表,温度计,脚架,棱镜,手持GPS 5、规范 5.1城市测量规范(C118/99) 5.2工程测量规范(GB50026/93) 6、技术要求 6.1一级导线测量的技术要求 光电测距导线的主要技术要求应符合表一二三的规定。 表一,光电测距导线的水平角技术要求
注:n为测站数。 表二,光电测距导线的竖直角技术要求 表三,光电测距导线的测距技术要求 6.2每条边量测测站一端的气象数据。温度取位至0.5℃,气压取位至100pa 或1mmHg(所使用的气象仪器应在检定的使用有效期内)。 导线边长应进行加常数、乘常数、气象、倾斜改正以及高程归化和投影改化等各项改正计算。
- 误差理论与测量平差基础期末考试试卷样题Word版
- 最新《测量平差》重要试卷及答案
- 《测量平差》重要试卷及答案
- 测量平差试题一
- 测量平差期末试题
- 测量平差试卷及答案
- 误差理论与测量平差基础期末考试试卷样题
- 《误差理论与测量平差基础》试卷A(答案)
- (完整word版)[精品]误差理论与测量平差基础试题
- [整理]《测量平差》试卷e及答案(-5-1).
- 《误差理论与测量平差基础》试卷A(2013)
- 《误差理论与测量平差基础》课程试卷及答案
- 测量平差试卷及答案
- 《测量平差》重要试卷及答案
- 桂林理工大学《误差理论与测量平差基础》考试试卷(含参考答案)
- 误差理论与测量平差试题+答案
- 测量平差超级经典试卷含答案
- 测量平差试卷及答案
- 昆明理工大学测量平差2015—2019年考研真题试题
- 测量平差试卷及答案